- SAT and model checking

Содержание
- 2. Bounded Model Checking (BMC) A.I. Planning problems: can we reach a desired state in k steps?
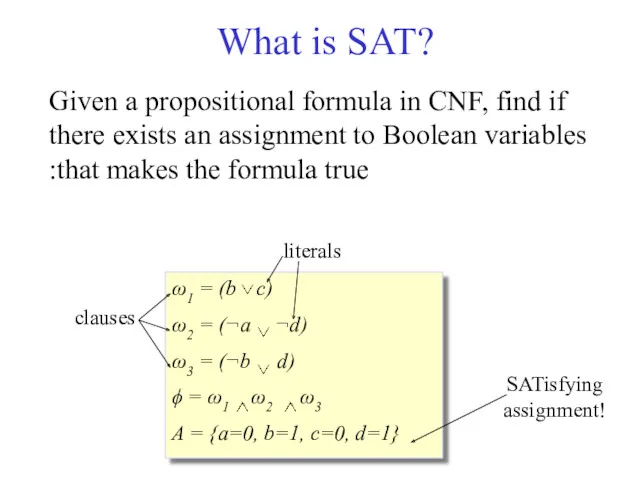
- 3. What is SAT? SATisfying assignment! Given a propositional formula in CNF, find if there exists an
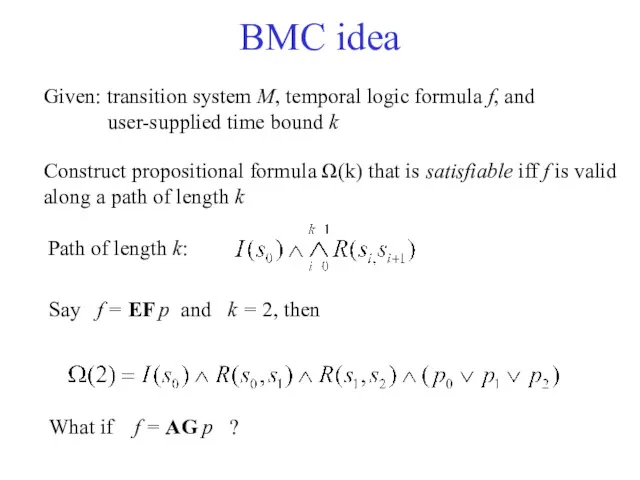
- 4. BMC idea Given: transition system M, temporal logic formula f, and user-supplied time bound k Construct
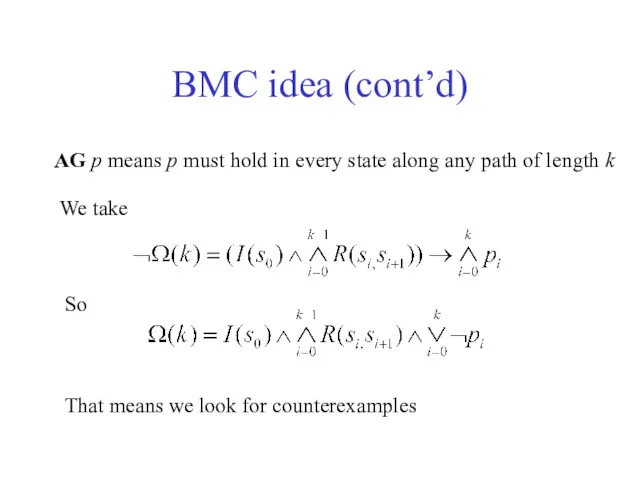
- 5. BMC idea (cont’d) AG p means p must hold in every state along any path of
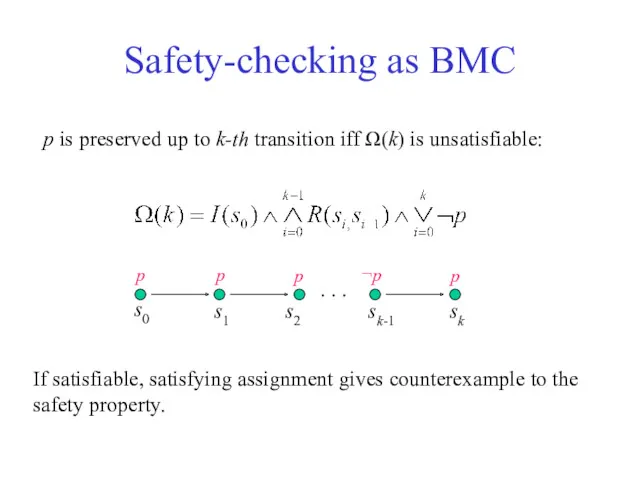
- 6. Safety-checking as BMC p is preserved up to k-th transition iff Ω(k) is unsatisfiable: If satisfiable,
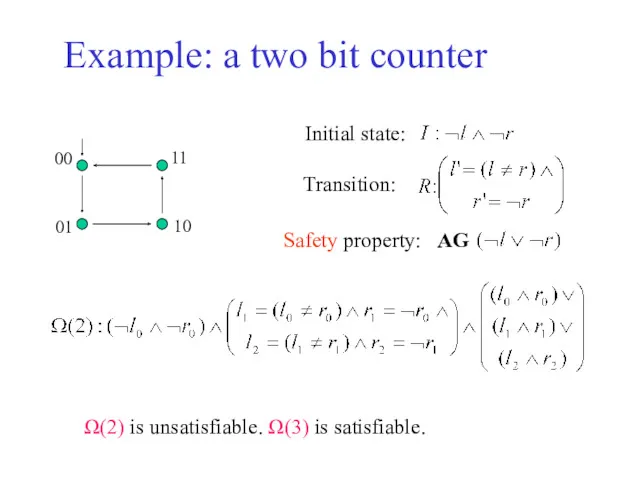
- 7. Example: a two bit counter Safety property: AG Ω(2) is unsatisfiable. Ω(3) is satisfiable. Initial state:
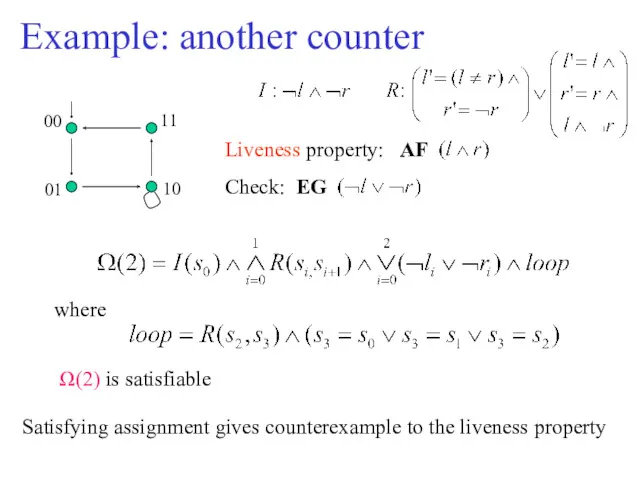
- 8. Example: another counter Liveness property: AF Ω(2) is satisfiable Check: EG where Satisfying assignment gives counterexample
- 9. What BMC with SAT Can Do All LTL ACTL and ECTL In principle, all CTL and
- 10. How big should k be? For every model M and LTL property ϕ there exists k
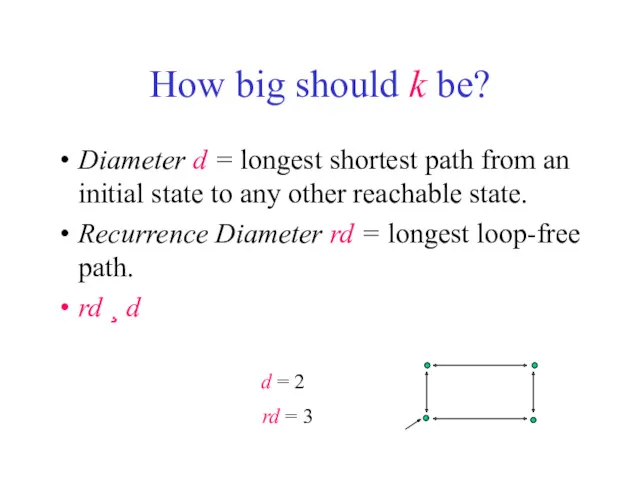
- 11. How big should k be? Diameter d = longest shortest path from an initial state to
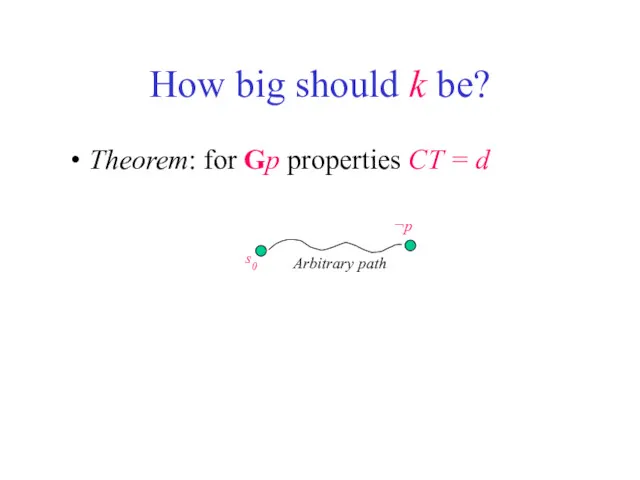
- 12. How big should k be? Theorem: for Gp properties CT = d
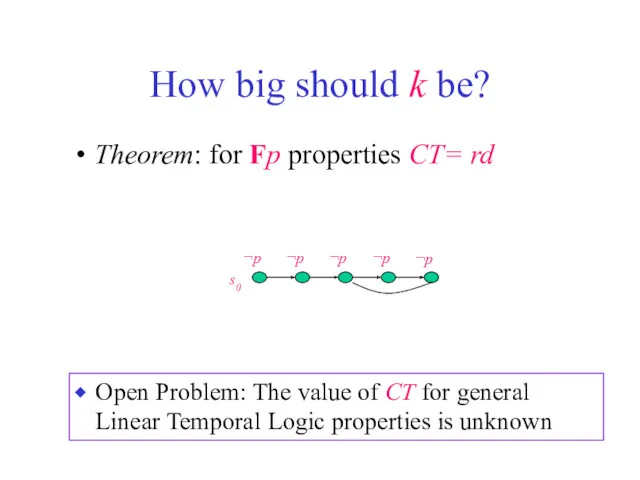
- 13. How big should k be? Theorem: for Fp properties CT= rd Open Problem: The value of
- 14. Given ϕ in CNF: (x,y,z),(-x,y),(-y,z),(-x,-y,-z) Decide() Deduce() Resolve_Conflict() √ X X X X X ϕ A
- 15. While (true) { if (!Decide()) return (SAT); while (!Deduce()) if (!Resolve_Conflict()) return (UNSAT); } Choose the
- 16. A = ∅ empty clause? y UNSAT conflict? Obtain conflict clause and backtrack y n is
- 17. The Implication Graph (¬a ∨ b) ∧ (¬b ∨ c ∨ d) Assignment: a ∧ b
- 18. Resolution a ∨ b ∨ ¬c ¬a ∨ ¬c ∨ d b ∨ ¬c ∨ d
- 19. Conflict clauses (¬a ∨ b) ∧ (¬b ∨ c ∨ d) ∧ (¬b ∨ ¬ d)
- 20. Conflict Clauses (cont.) Conflict clauses: Are generated by resolution Are implied by existing clauses Are in
- 21. Generating refutations Refutation = a proof of the null clause Record a DAG containing all resolution
- 22. Unbounded Model Checking A variety of methods to exploit SAT and BMC for unbounded model checking:
- 23. Conclusions: BDDs vs. SAT Many models that cannot be solved by BDD symbolic model checkers, can
- 25. Скачать презентацию
Bounded Model Checking (BMC)
A.I. Planning problems: can we reach a desired
Bounded Model Checking (BMC)
A.I. Planning problems: can we reach a desired
What is SAT?
SATisfying assignment!
Given a propositional formula in CNF, find if
What is SAT?
SATisfying assignment!
Given a propositional formula in CNF, find if
BMC idea
Given: transition system M, temporal logic formula f, and
BMC idea
Given: transition system M, temporal logic formula f, and
BMC idea (cont’d)
AG p means p must hold in every state
BMC idea (cont’d)
AG p means p must hold in every state
Safety-checking as BMC
p is preserved up to k-th transition iff
Safety-checking as BMC
p is preserved up to k-th transition iff
Example: a two bit counter
Safety property: AG
Ω(2) is unsatisfiable. Ω(3) is
Example: a two bit counter
Safety property: AG
Ω(2) is unsatisfiable. Ω(3) is
Example: another counter
Liveness property: AF
Ω(2) is satisfiable
Check: EG
where
Satisfying assignment gives
Example: another counter
Liveness property: AF
Ω(2) is satisfiable
Check: EG
where
Satisfying assignment gives
What BMC with SAT Can Do
All LTL
ACTL and ECTL
In principle, all
What BMC with SAT Can Do
All LTL
ACTL and ECTL
In principle, all
How big should k be?
For every model M and LTL property
How big should k be?
For every model M and LTL property
How big should k be?
Diameter d = longest shortest path from
How big should k be?
Diameter d = longest shortest path from
How big should k be?
Theorem: for Gp properties CT = d
How big should k be?
Theorem: for Gp properties CT = d
How big should k be?
Theorem: for Fp properties CT= rd
Open Problem:
How big should k be?
Theorem: for Fp properties CT= rd
Open Problem:
Given ϕ in CNF: (x,y,z),(-x,y),(-y,z),(-x,-y,-z)
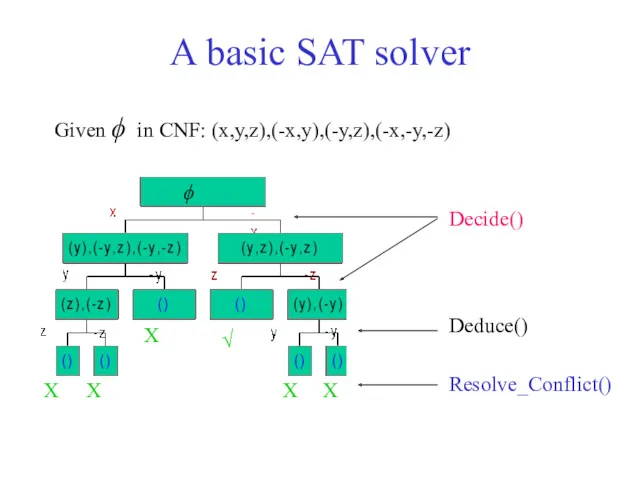
Decide()
Deduce()
Resolve_Conflict()
√
X
X
X
X
X
ϕ
A basic SAT solver
Given ϕ in CNF: (x,y,z),(-x,y),(-y,z),(-x,-y,-z)
Decide()
Deduce()
Resolve_Conflict()
√
X
X
X
X
X
ϕ
A basic SAT solver
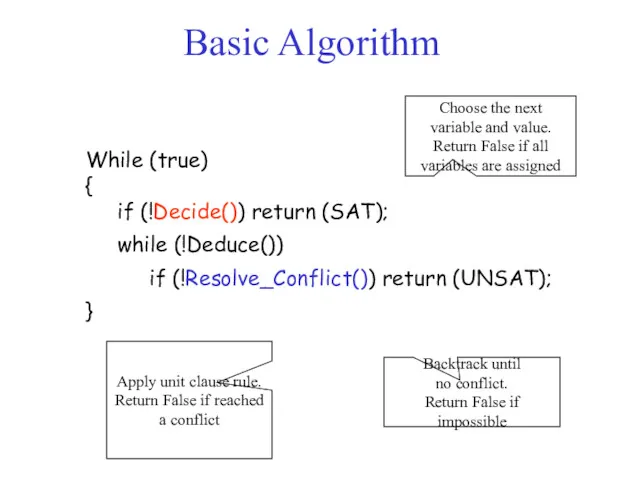
While (true)
{
if (!Decide()) return (SAT);
while (!Deduce())
if (!Resolve_Conflict()) return (UNSAT);
}
Choose the
While (true)
{
if (!Decide()) return (SAT);
while (!Deduce())
if (!Resolve_Conflict()) return (UNSAT);
}
Choose the
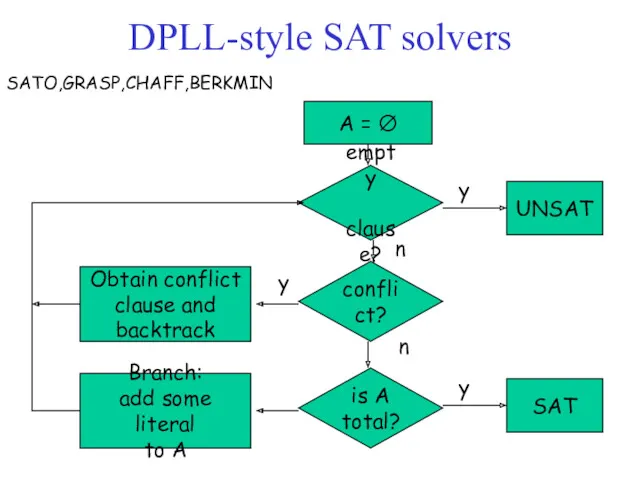
A = ∅
empty
clause?
y
UNSAT
conflict?
Obtain conflict
clause and
backtrack
y
n
is A
total?
y
SAT
Branch:
add some literal
to A
DPLL-style SAT
A = ∅
empty
clause?
y
UNSAT
conflict?
Obtain conflict
clause and
backtrack
y
n
is A
total?
y
SAT
Branch:
add some literal
to A
DPLL-style SAT
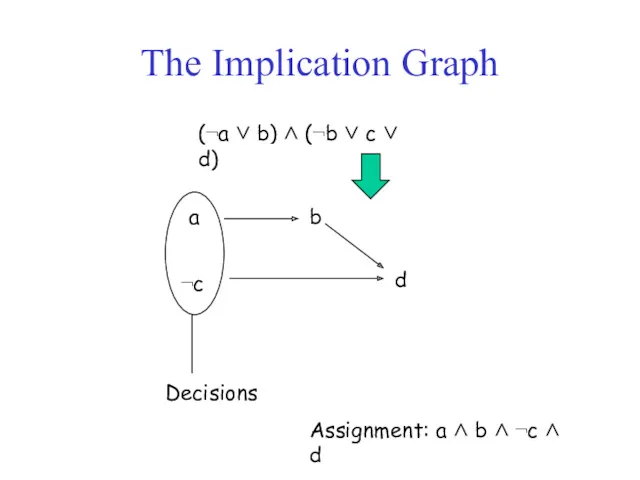
The Implication Graph
(¬a ∨ b) ∧ (¬b ∨ c ∨
The Implication Graph
(¬a ∨ b) ∧ (¬b ∨ c ∨
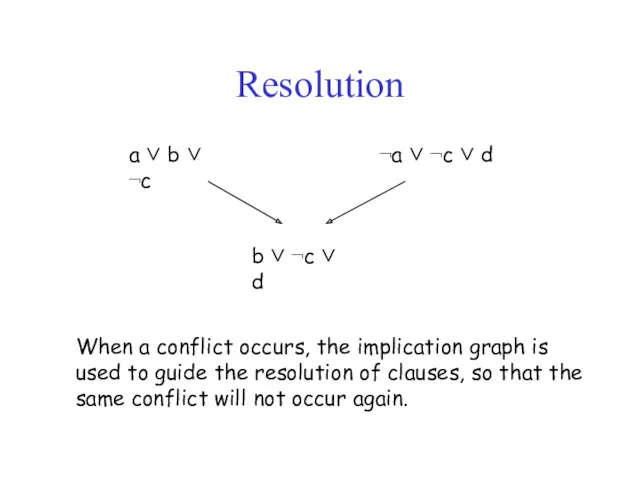
Resolution
a ∨ b ∨ ¬c
¬a ∨ ¬c ∨ d
b ∨ ¬c
Resolution
a ∨ b ∨ ¬c
¬a ∨ ¬c ∨ d
b ∨ ¬c
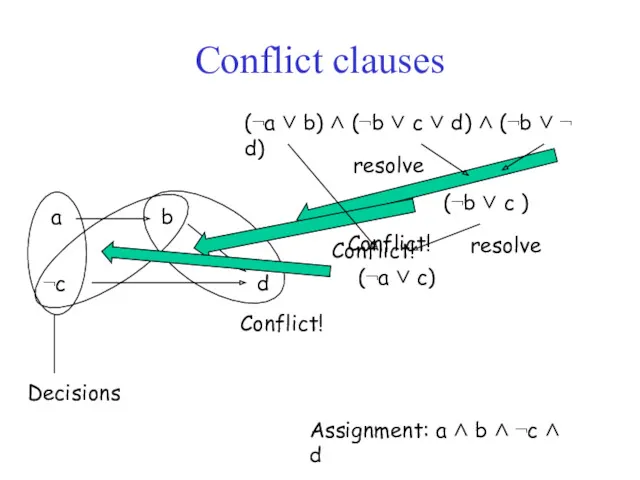
Conflict clauses
(¬a ∨ b) ∧ (¬b ∨ c ∨ d) ∧
Conflict clauses
(¬a ∨ b) ∧ (¬b ∨ c ∨ d) ∧
Conflict Clauses (cont.)
Conflict clauses:
Are generated by resolution
Are implied by existing clauses
Are
Conflict Clauses (cont.)
Conflict clauses:
Are generated by resolution
Are implied by existing clauses
Are
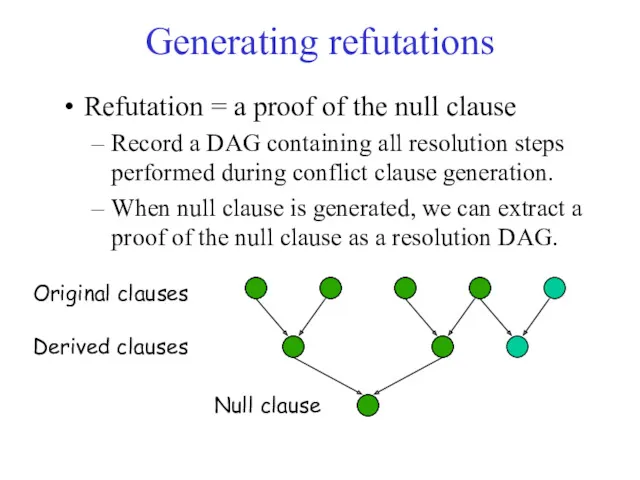
Generating refutations
Refutation = a proof of the null clause
Record a DAG
Generating refutations
Refutation = a proof of the null clause
Record a DAG
Unbounded Model Checking
A variety of methods to exploit SAT and BMC
Unbounded Model Checking
A variety of methods to exploit SAT and BMC
Conclusions: BDDs vs. SAT
Many models that cannot be solved by BDD
Conclusions: BDDs vs. SAT
Many models that cannot be solved by BDD
 Белочка в стране Веселая математика
Белочка в стране Веселая математика Письменное сложение двузначных чисел без перехода через десяток
Письменное сложение двузначных чисел без перехода через десяток Задачи с экономическим содержанием
Задачи с экономическим содержанием Весёлая математика
Весёлая математика Решение логарифмических неравенств
Решение логарифмических неравенств Конспект урока по математике 4 класс Школа России Письменное деление
Конспект урока по математике 4 класс Школа России Письменное деление Анимашки для презентаций в Microsoft PowerPoint - 5
Анимашки для презентаций в Microsoft PowerPoint - 5 Неопределенный интеграл
Неопределенный интеграл Математика (початкова школа)
Математика (початкова школа) Презентация по математике Калькулятор
Презентация по математике Калькулятор Критерий согласия распределений χ 2
Критерий согласия распределений χ 2 Угол между прямыми
Угол между прямыми Интерактивный кроссворд: Стереометрия
Интерактивный кроссворд: Стереометрия Перестановки. Размещения. Сочетания. комбинаторика
Перестановки. Размещения. Сочетания. комбинаторика Деление десятичных дробей
Деление десятичных дробей Сложение и вычитание в пределах 10. 1 класс
Сложение и вычитание в пределах 10. 1 класс Среднее арифметическое. Деление десятичной дроби на натуральное число
Среднее арифметическое. Деление десятичной дроби на натуральное число Школа Квентин – подготовка к ЕГЭ
Школа Квентин – подготовка к ЕГЭ Математика. 1 класс. Урок 51. Число 10 - Презентация
Математика. 1 класс. Урок 51. Число 10 - Презентация прибавление и вычитание 2 и 3
прибавление и вычитание 2 и 3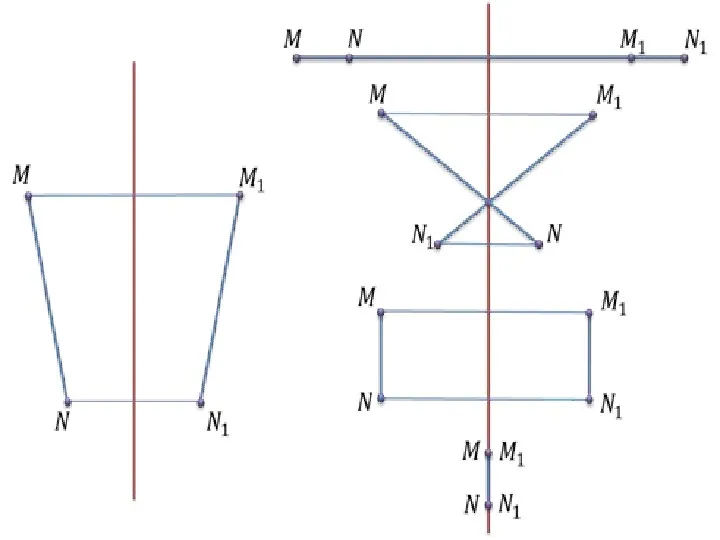 Симметричные фигуры
Симметричные фигуры Численные методы алгебры
Численные методы алгебры Вычитание числа с переходом через десяток, вида 13-
Вычитание числа с переходом через десяток, вида 13-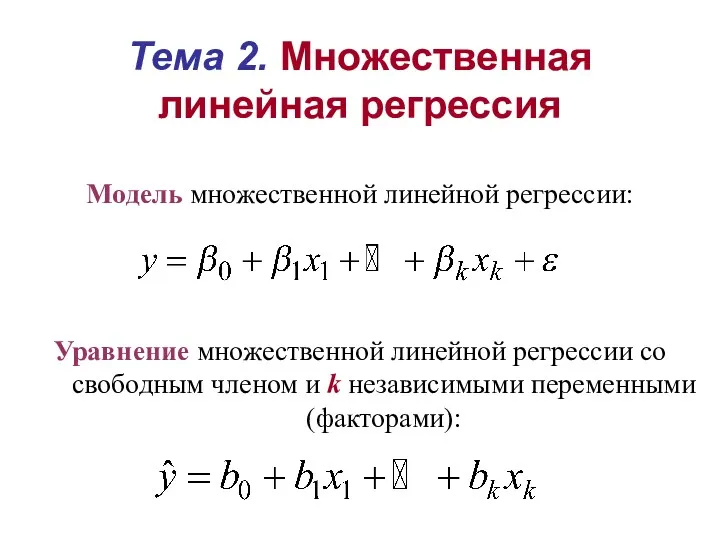 Множественная линейная регрессия
Множественная линейная регрессия Презентация к уроку математики в 4 классе по теме ПОСТРОЕНИЕ ТОЧЕК ПО ИХ КООРДИНАТАМ.
Презентация к уроку математики в 4 классе по теме ПОСТРОЕНИЕ ТОЧЕК ПО ИХ КООРДИНАТАМ. счёт в пределах 10.
счёт в пределах 10.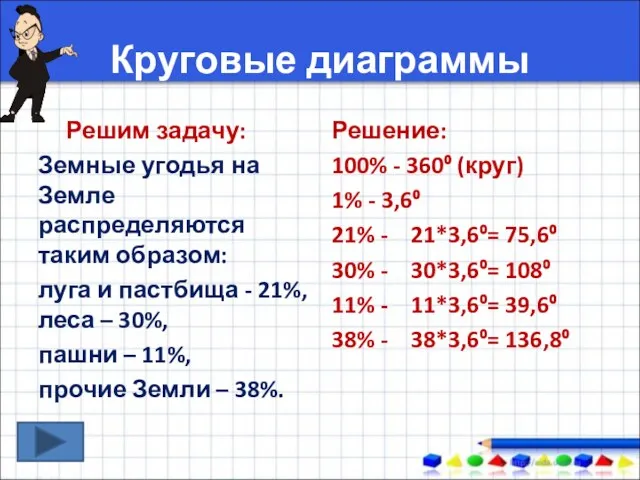 Круговые диаграммы
Круговые диаграммы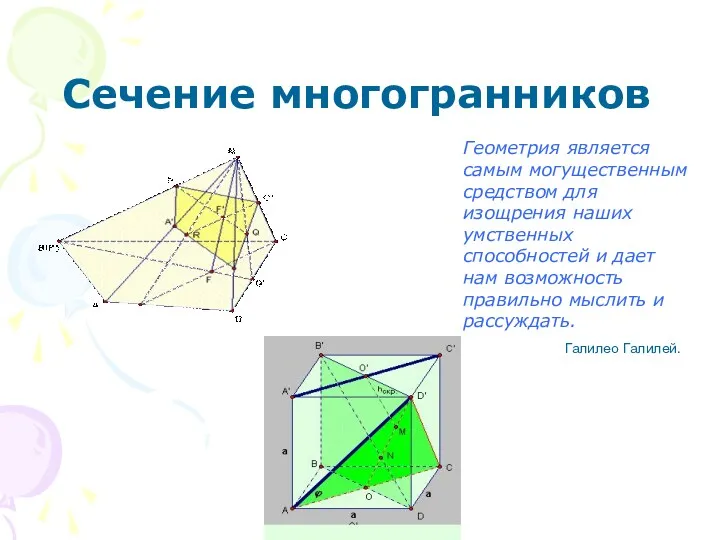 Сечение многогранников
Сечение многогранников