- Solução Numérica de Equações Diferenciais

Содержание
- 2. Uma equação diferencial ordinária é definida como uma equação que envolve uma função incógnita y e
- 3. CIRCUITOS ELÉTRICOS RLC Circuitos elétricos mais complexos são basicamente formados por resistores de resistência R, indutores
- 4. Se E(t) é a diferença de potencial da fonte de alimentação e i(t) é a intensidade
- 5. VC é a diferença de potencial nos terminais do capacitor: A lei de Kirchoff para tensões
- 6. Substituindo em obtemos:
- 7. Se E(t) é constante e derivarmos em relação à variável t, teremos e temos uma EDO
- 8. TIPOS DE EQUAÇÕES DIFERENCIAIS
- 9. EQUAÇÕES DIFERENCIAIS ORDINÁRIAS São equações diferenciais que possuem apenas uma variável independente. Exemplos: y é função
- 10. EQUAÇÕES DIFERENCIAIS PARCIAIS Uma equação diferencial parcial é aquela cuja função incógnita depende de duas ou
- 11. SOLUÇÃO DE EQUAÇÕES DIFERENCIAIS Determinadas equações diferenciais podem ser solucionadas analiticamente, cuja solução é uma expressão
- 12. Exemplo: Resolva a equação diferencial Solução:
- 13. Observe que a solução da equação diferencial resulta numa família de curvas que dependem da constante
- 14. SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS – PROBLEMA DE VALOR INICIAL
- 15. Considere a equação diferencial ordinária de primeira ordem com condição inicial : Se a solução da
- 16. então a solução numérica da equação diferencial é obtida aproximando-se os valores , conforme a tabela
- 17. Na solução numérica não se determina a expressão literal da função y(x), mas sim uma solução
- 18. MÉTODOS BASEADOS NA SÉRIE DE TAYLOR Série de Taylor Resumo
- 19. Suponhamos que, de alguma forma, tenhamos as aproximações y1, y2, ..., yi para y(x), em x1,
- 20. Se yi(j) representa a aproximação para a j-ésima derivada da função y(x) em xi: y(j)(xi) e
- 21. Observamos que, se y(x) tem derivadas de ordem (k+1), contínua num intervalo fechado I que contém
- 22. Um método numérico é dito de ordem p se existe uma constante C tal que: Onde
- 23. Agora, y’(x) = f(x, y(x)). Então: Assim, por exemplo, o método de série de Taylor de
- 24. A expressão da terceira derivada já nos mostra a dificuldade dos cálculos de um método de
- 25. Os métodos que usam o desenvolvimento em série de Taylor de y(x) teoricamente fornecem solução para
- 26. MÉTODO DE PASSO UM MÉTODO DE EULER
- 27. Consideremos, o método de série de Taylor de ordem k = 1, ou seja, onde Este
- 28. Como conhecemos x0 e y0 = f(x0), então sabemos calcular y’(x0) = f(x0,y0). Assim, a reta
- 29. O raciocínio é repetido com (x1,y1) e y2 = y1 + hf(x1,y1) e assim, sucessivamente, o
- 30. EXEMPLO: Seja o PVI: y’ = y, y(0) = 1. Trabalhando com quatro casas decimais, usaremos
- 31. donde Portanto, Considerando pontos igualmente espaçados, tem-se h = 0.04/n, onde n é o número de
- 32. Assim, Agora: e Dado que e0.04, com quatro casas decimais, vale 1.0408, temos que o erro
- 33. MÉTODOS DE RUNGE-KUTTA
- 34. A idéia básica destes métodos é aproveitar as qualidades dos métodos de série de Taylor (ordem
- 35. Podemos dizer que os métodos de Runge-Kutta de ordem p se caracterizam pelas propriedades: São de
- 36. MÉTODOS DE RUNGE-KUTTA DE 1ª ORDEM: MÉTODO DE EULER Já vimos que o método de Euler
- 37. MÉTODOS DE RUNGE-KUTTA DE 2ª ORDEM: Inicialmente será apresentado um método particular que é o método
- 38. MÉTODOS DE EULER APERFEIÇOADO: INTERPRETAÇÃO GEOMÉTRICA
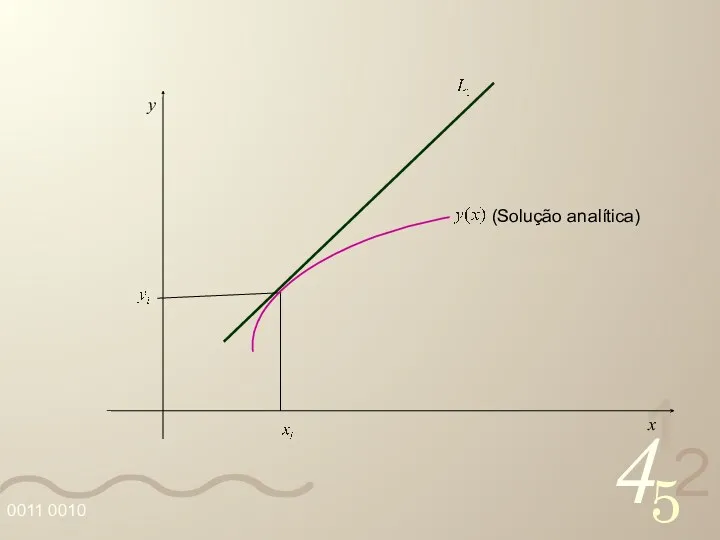
- 39. Considere o ponto (xi, yi), yi ≅ y(xi). Vamos supor a situação ideal em que a
- 40. y x (Solução analítica)
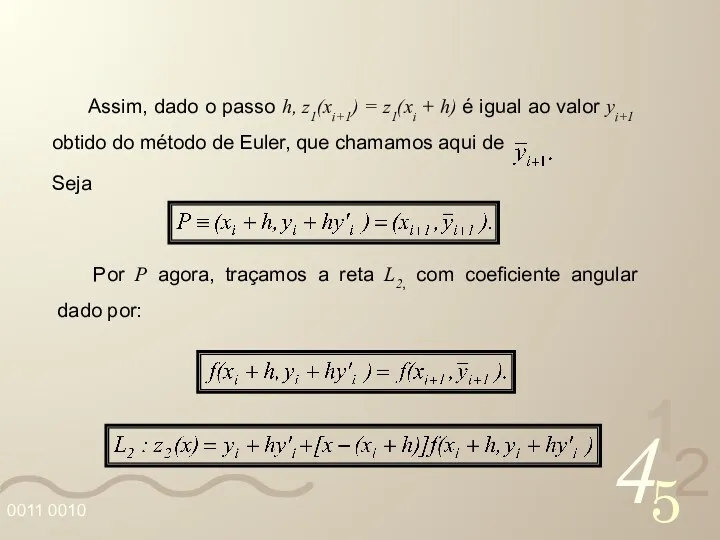
- 41. Assim, dado o passo h, z1(xi+1) = z1(xi + h) é igual ao valor yi+1 obtido
- 42. y x
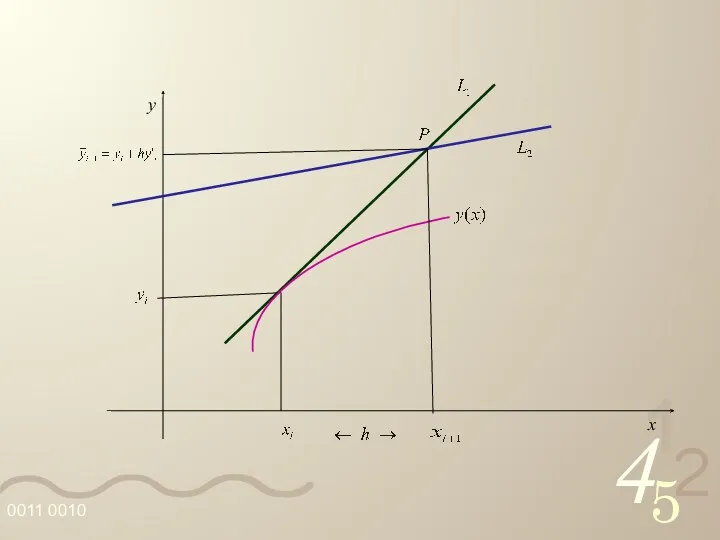
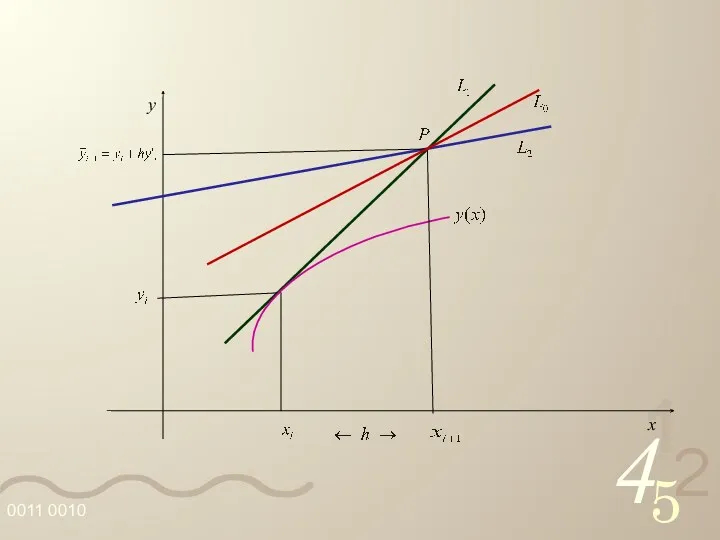
- 43. A reta pontilhada L0 passa por P e tem inclinação dada pela média aritmética das inclinações
- 44. y x
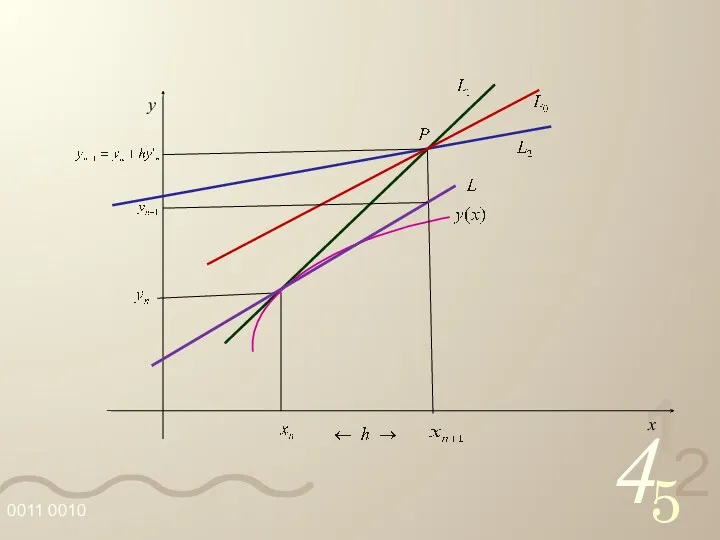
- 45. A reta L passa por (xi, yi) e é paralela à reta L0, donde: A reta
- 46. y x
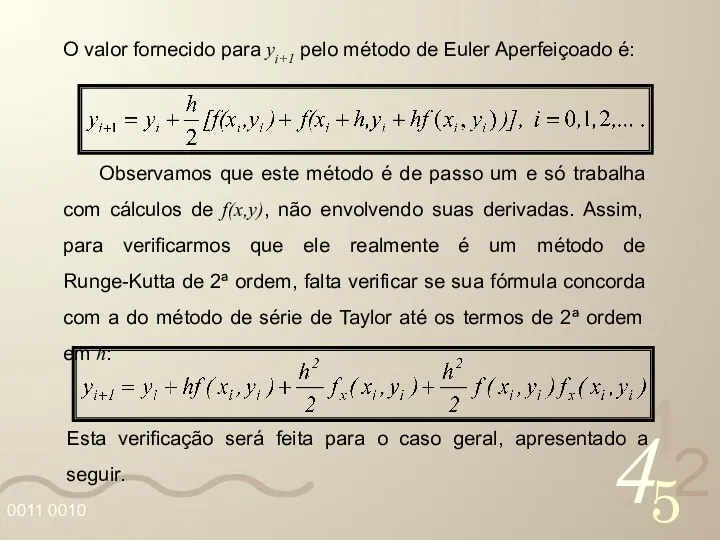
- 47. O valor fornecido para yi+1 pelo método de Euler Aperfeiçoado é: Observamos que este método é
- 48. FORMA GERAL DOS MÉTODOS DE RUNGE-KUTTA DE 2ª ORDEM
- 49. O método de Euler Aperfeiçoado é um método de Runge-Kutta de 2ª ordem e podemos pensar
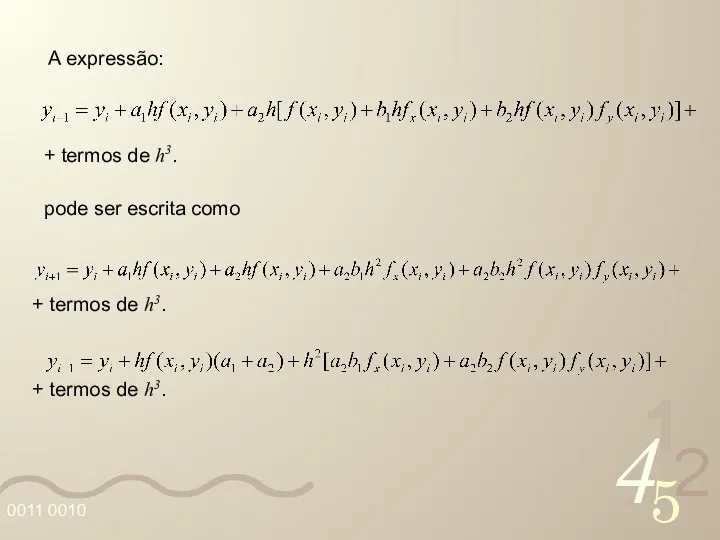
- 50. O desenvolvimento de Taylor da função f(xi + b1h, yi + b2hf(xi , yi )) em
- 51. + termos de h3. A expressão: pode ser escrita como + termos de h3. + termos
- 52. Como o método de série de Taylor de 2ª ordem é escrita como: E o método
- 53. O sistema anterior possui três equações e quatro variáveis. Escolhendo um dos parâmetros arbitrariamente, por exemplo
- 54. MÉTODOS DE RUNGE-KUTTA DE ORDENS SUPERIORES
- 55. De forma análoga, pode-se construir métodos de 3ª ordem, 4ª ordem, etc. A seguir serão fornecidas
- 56. 4ª ordem onde
- 57. OBSERVAÇÃO: Os métodos de Runge-Kutta, apesar de serem auto-iniciáveis (pois são de passo um) e não
- 58. MÉTODOS DO PONTO MÉDIO
- 59. Considere agora o desenvolvimento de y(xi + h) e y(xi − h) em série de Taylor
- 60. Considerando apenas o primeiro termo do lado direito da expansão acima, substituindo y(xi+h) por yi+1, y(xi
- 61. Série de Taylor: Seja f uma função com derivadas de todas as ordens em algum intervalo
- 62. Exemplo: Desenvolver f(x) = ln(x) , em torno de x = 1. Assim,
- 63. Portanto,
- 64. MÉTODOS DE PASSO MÚLTIPLO BASEADOS EM INTEGRAÇÃO NUMÉRICA
- 65. A característica destes métodos é a utilização de informações sobre a solução em mais de um
- 66. A fórmula geral dos métodos lineares de passo múltiplo é dada por: Nesta expressão, observa-se que:
- 67. MÉTODO DE ADAMS - BASHFORTH
- 68. Estes métodos baseiam-se na idéia de integrar a equação diferencial ordinária de primeira ordem, isto é:
- 69. Seja a aproximação de f(x, y(x)) dada pelo polinômio de grau m, pm(x) , que interpola
- 70. Para m = 3, mostra-se que: com erro local: Método explícito de ordem 4
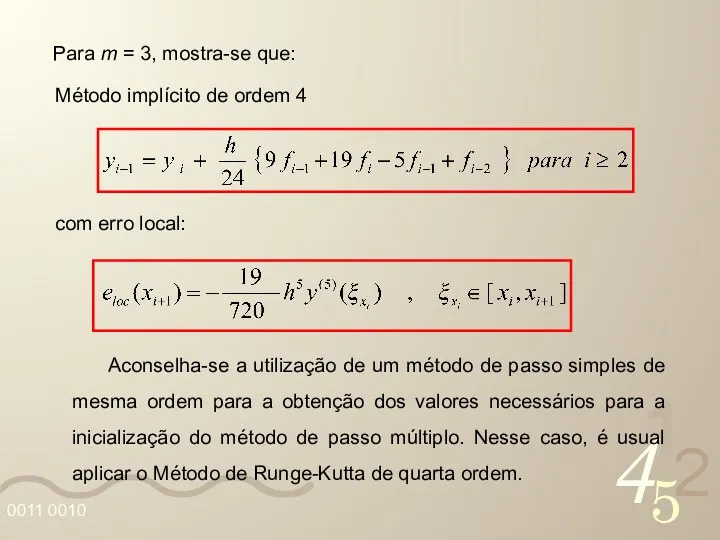
- 71. Para m = 3, mostra-se que: com erro local: Método implícito de ordem 4 Aconselha-se a
- 72. MÉTODO PREDITOR – CORRETOR DE ADAMS-MOULTON
- 73. Dado o PVI: 1o passo: Calcular usando um método de passo simples de 4ª ordem os
- 74. 3o passo: Calcular: 4o passo: Calcular yi+1(k) utilizando o método implícito (CORREÇÃO): Até que
- 75. EQUAÇÃO DIFERENCIAL DE ORDEM M
- 76. Uma equação diferencial de ordem m, pode ser reduzida a um sistema de m equações de
- 78. Скачать презентацию
Uma equação diferencial ordinária é definida como uma equação que envolve
Uma equação diferencial ordinária é definida como uma equação que envolve
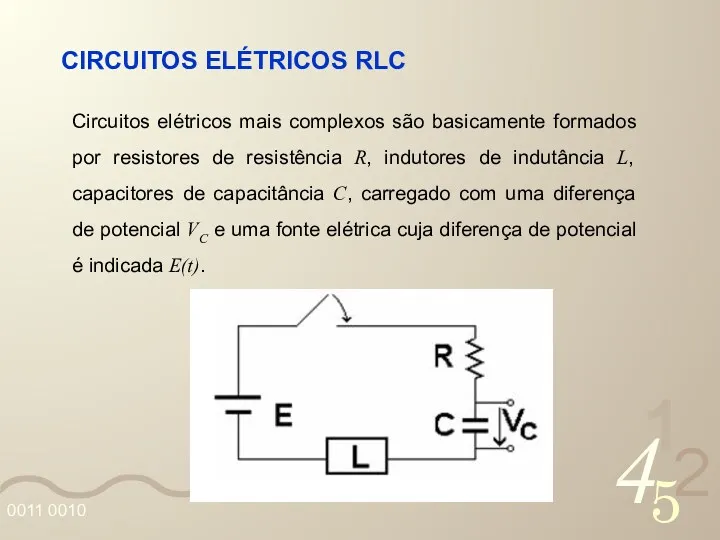
CIRCUITOS ELÉTRICOS RLC
Circuitos elétricos mais complexos são basicamente formados por resistores
CIRCUITOS ELÉTRICOS RLC
Circuitos elétricos mais complexos são basicamente formados por resistores
Se E(t) é a diferença de potencial da fonte de alimentação
Se E(t) é a diferença de potencial da fonte de alimentação
VC é a diferença de potencial nos terminais do capacitor:
A
VC é a diferença de potencial nos terminais do capacitor:
A
Substituindo
em
obtemos:
Substituindo
em
obtemos:
Se E(t) é constante e derivarmos em relação à variável t,
Se E(t) é constante e derivarmos em relação à variável t,
TIPOS DE EQUAÇÕES
DIFERENCIAIS
TIPOS DE EQUAÇÕES
DIFERENCIAIS
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
São equações diferenciais que possuem apenas uma variável independente.
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
São equações diferenciais que possuem apenas uma variável independente.
EQUAÇÕES DIFERENCIAIS PARCIAIS
Uma equação diferencial parcial é aquela cuja função incógnita
EQUAÇÕES DIFERENCIAIS PARCIAIS
Uma equação diferencial parcial é aquela cuja função incógnita
SOLUÇÃO DE EQUAÇÕES DIFERENCIAIS
Determinadas equações diferenciais podem ser solucionadas analiticamente,
SOLUÇÃO DE EQUAÇÕES DIFERENCIAIS
Determinadas equações diferenciais podem ser solucionadas analiticamente,
Exemplo:
Resolva a equação diferencial
Solução:
Exemplo:
Resolva a equação diferencial
Solução:
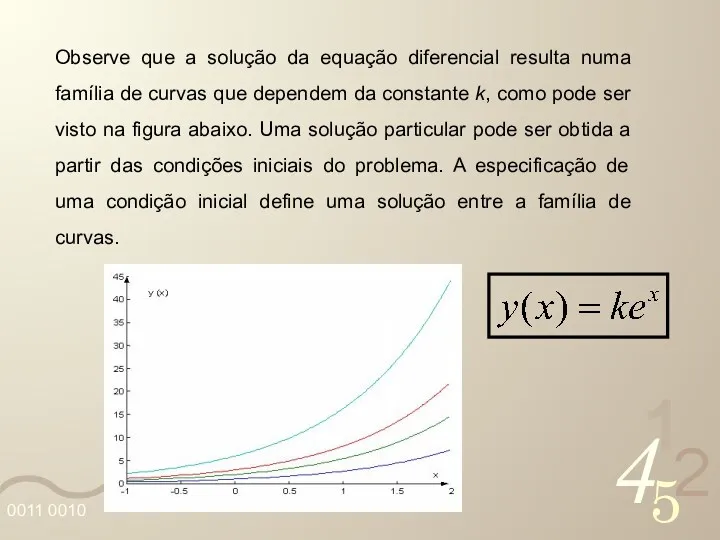
Observe que a solução da equação diferencial resulta numa família de
Observe que a solução da equação diferencial resulta numa família de
SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS – PROBLEMA DE VALOR INICIAL
SOLUÇÃO NUMÉRICA DE EQUAÇÕES DIFERENCIAIS ORDINÁRIAS – PROBLEMA DE VALOR INICIAL
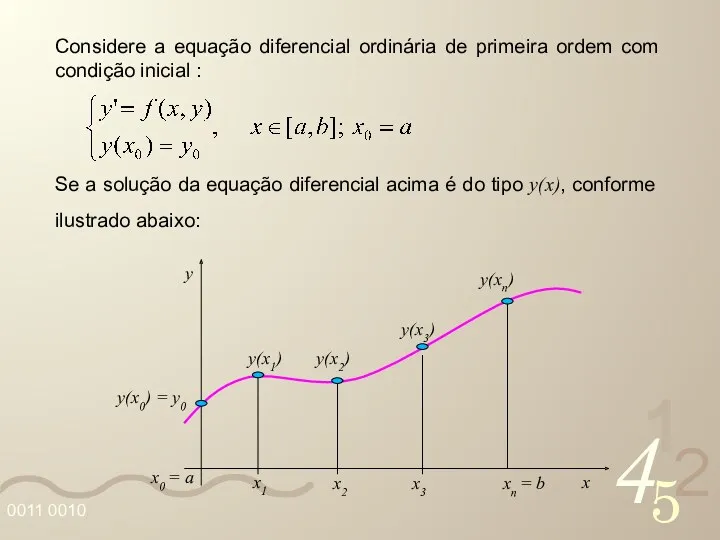
Considere a equação diferencial ordinária de primeira ordem com condição inicial
Considere a equação diferencial ordinária de primeira ordem com condição inicial
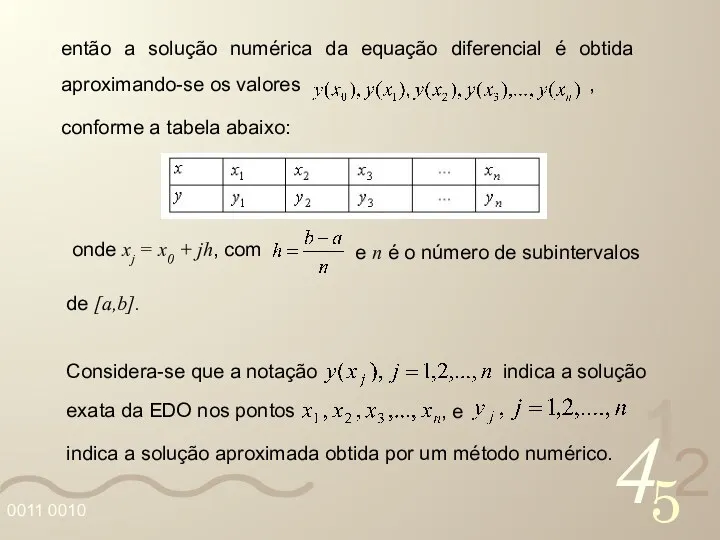
então a solução numérica da equação diferencial é obtida aproximando-se os
então a solução numérica da equação diferencial é obtida aproximando-se os
Na solução numérica não se determina a expressão literal da função
Na solução numérica não se determina a expressão literal da função

MÉTODOS BASEADOS
NA SÉRIE DE TAYLOR
Série de Taylor
Resumo
MÉTODOS BASEADOS
NA SÉRIE DE TAYLOR
Série de Taylor
Resumo
Suponhamos que, de alguma forma, tenhamos as aproximações y1, y2, ...,
Suponhamos que, de alguma forma, tenhamos as aproximações y1, y2, ...,
Se yi(j) representa a aproximação para a j-ésima derivada da função
Se yi(j) representa a aproximação para a j-ésima derivada da função
Observamos que, se y(x) tem derivadas de ordem (k+1), contínua num
Observamos que, se y(x) tem derivadas de ordem (k+1), contínua num
Um método numérico é dito de ordem p se existe uma
Um método numérico é dito de ordem p se existe uma
Agora, y’(x) = f(x, y(x)). Então:
Assim, por exemplo, o método de
Agora, y’(x) = f(x, y(x)). Então:
Assim, por exemplo, o método de
A expressão da terceira derivada já nos mostra a dificuldade dos
A expressão da terceira derivada já nos mostra a dificuldade dos
Os métodos que usam o desenvolvimento em série de Taylor de
Os métodos que usam o desenvolvimento em série de Taylor de
MÉTODO DE PASSO UM
MÉTODO DE EULER
MÉTODO DE PASSO UM
MÉTODO DE EULER
Consideremos, o método de série de Taylor de ordem k =
Consideremos, o método de série de Taylor de ordem k =
Como conhecemos x0 e y0 = f(x0), então sabemos calcular y’(x0)
Como conhecemos x0 e y0 = f(x0), então sabemos calcular y’(x0)
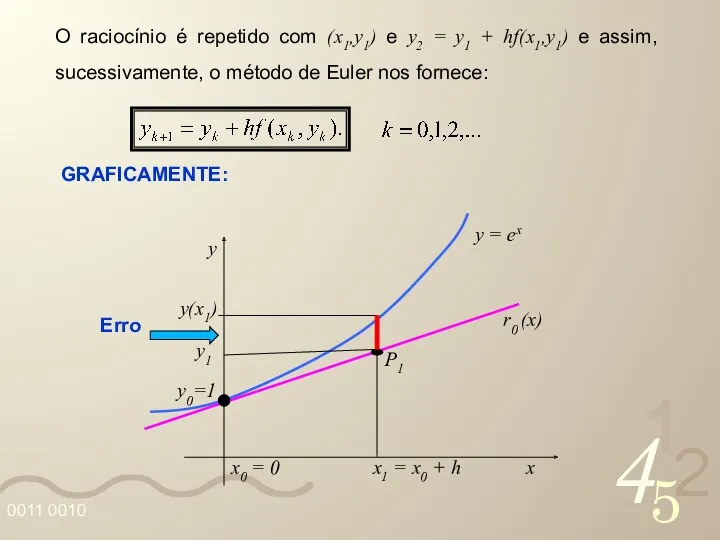
O raciocínio é repetido com (x1,y1) e y2 = y1 +
O raciocínio é repetido com (x1,y1) e y2 = y1 +
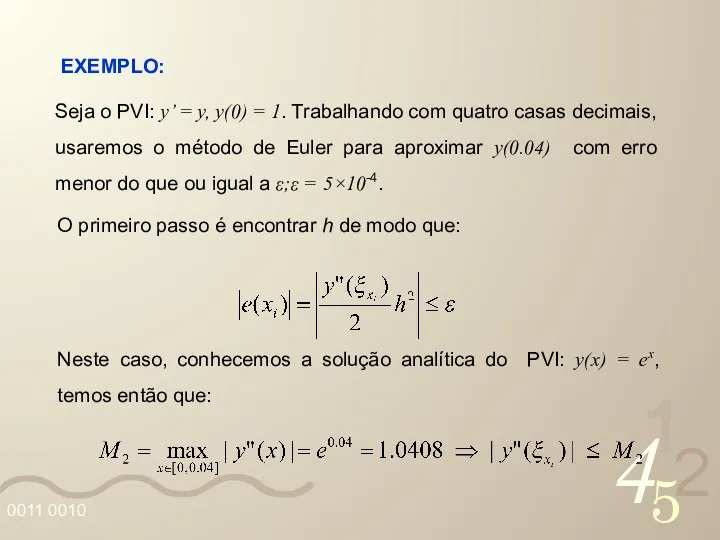
EXEMPLO:
Seja o PVI: y’ = y, y(0) = 1. Trabalhando com
EXEMPLO:
Seja o PVI: y’ = y, y(0) = 1. Trabalhando com
donde
Portanto,
Considerando pontos igualmente espaçados, tem-se h = 0.04/n, onde n é
donde
Portanto,
Considerando pontos igualmente espaçados, tem-se h = 0.04/n, onde n é
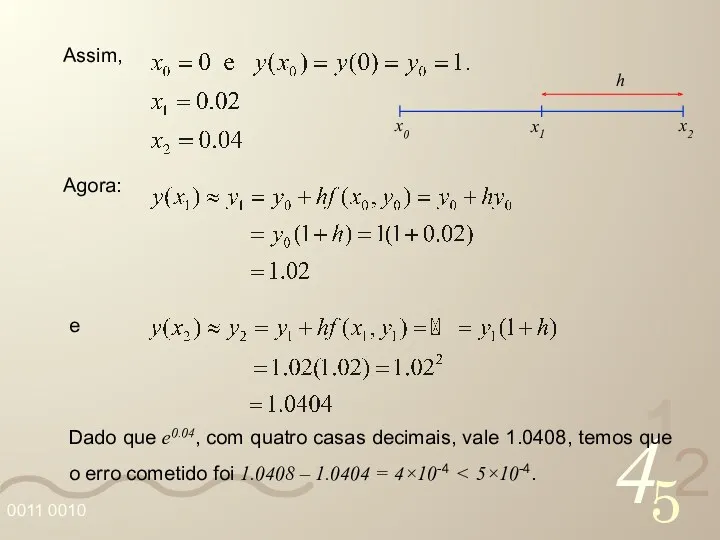
Assim,
Agora:
e
Dado que e0.04, com quatro casas decimais, vale 1.0408, temos que
Assim,
Agora:
e
Dado que e0.04, com quatro casas decimais, vale 1.0408, temos que
MÉTODOS DE
RUNGE-KUTTA
MÉTODOS DE
RUNGE-KUTTA
A idéia básica destes métodos é aproveitar as qualidades dos métodos
A idéia básica destes métodos é aproveitar as qualidades dos métodos
Podemos dizer que os métodos de Runge-Kutta de ordem p se
Podemos dizer que os métodos de Runge-Kutta de ordem p se
MÉTODOS DE RUNGE-KUTTA DE 1ª ORDEM:
MÉTODO DE EULER
Já vimos que
MÉTODOS DE RUNGE-KUTTA DE 1ª ORDEM:
MÉTODO DE EULER
Já vimos que
MÉTODOS DE RUNGE-KUTTA DE 2ª ORDEM:
Inicialmente será apresentado um método
MÉTODOS DE RUNGE-KUTTA DE 2ª ORDEM:
Inicialmente será apresentado um método
MÉTODOS DE EULER APERFEIÇOADO:
INTERPRETAÇÃO GEOMÉTRICA
MÉTODOS DE EULER APERFEIÇOADO:
INTERPRETAÇÃO GEOMÉTRICA
Considere o ponto (xi, yi), yi ≅ y(xi). Vamos supor a
Considere o ponto (xi, yi), yi ≅ y(xi). Vamos supor a
y
x
(Solução analítica)
y
x
(Solução analítica)
Assim, dado o passo h, z1(xi+1) = z1(xi + h) é
Assim, dado o passo h, z1(xi+1) = z1(xi + h) é
y
x
y
x
A reta pontilhada L0 passa por P e tem inclinação dada
A reta pontilhada L0 passa por P e tem inclinação dada
y
x
y
x
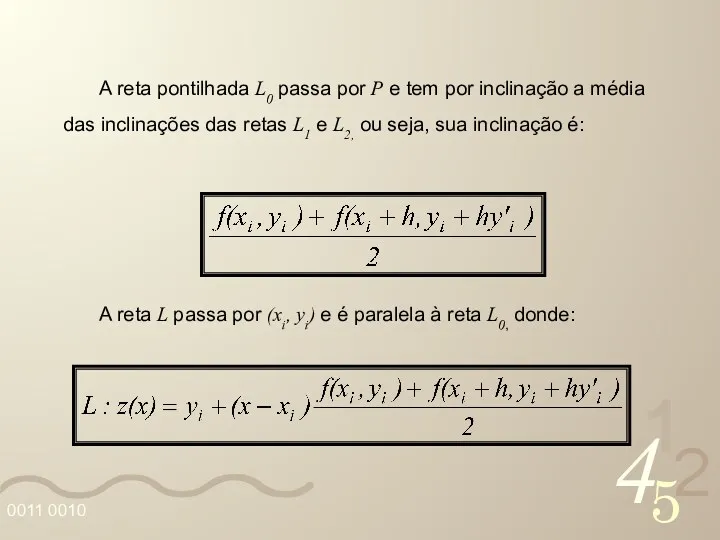
A reta L passa por (xi, yi) e é paralela à
A reta L passa por (xi, yi) e é paralela à
y
x
y
x
O valor fornecido para yi+1 pelo método de Euler Aperfeiçoado é:
Observamos
O valor fornecido para yi+1 pelo método de Euler Aperfeiçoado é:
Observamos
FORMA GERAL DOS MÉTODOS
DE
RUNGE-KUTTA DE 2ª ORDEM
FORMA GERAL DOS MÉTODOS
DE
RUNGE-KUTTA DE 2ª ORDEM
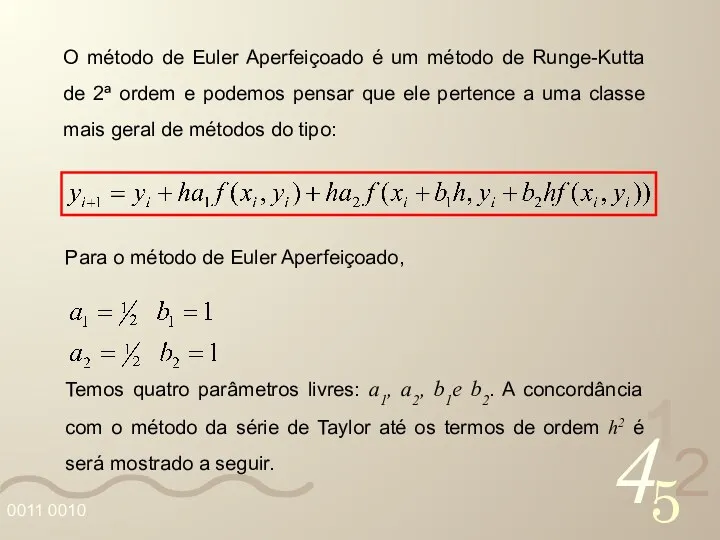
O método de Euler Aperfeiçoado é um método de Runge-Kutta de
O método de Euler Aperfeiçoado é um método de Runge-Kutta de
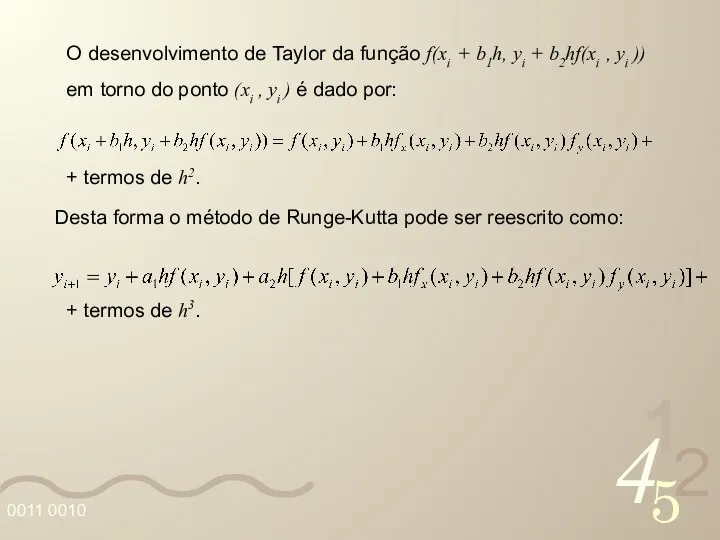
O desenvolvimento de Taylor da função f(xi + b1h, yi +
O desenvolvimento de Taylor da função f(xi + b1h, yi +
+ termos de h3.
A expressão:
pode ser escrita como
+ termos de h3.
+
+ termos de h3.
A expressão:
pode ser escrita como
+ termos de h3.
+
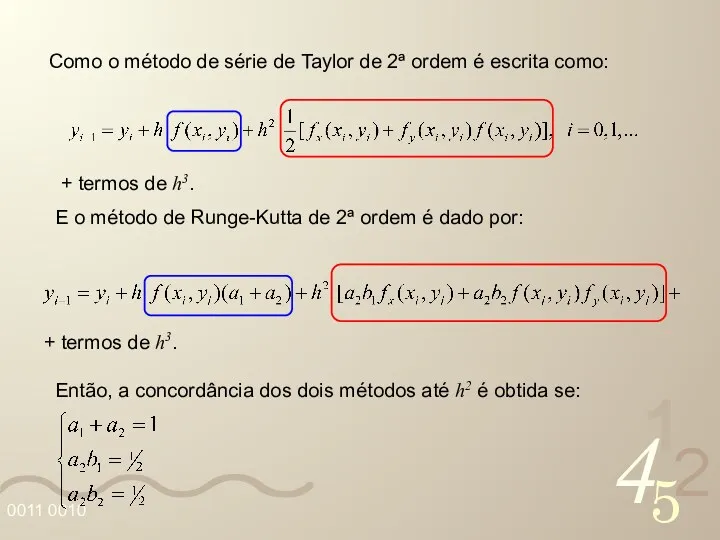
Como o método de série de Taylor de 2ª ordem é
Como o método de série de Taylor de 2ª ordem é
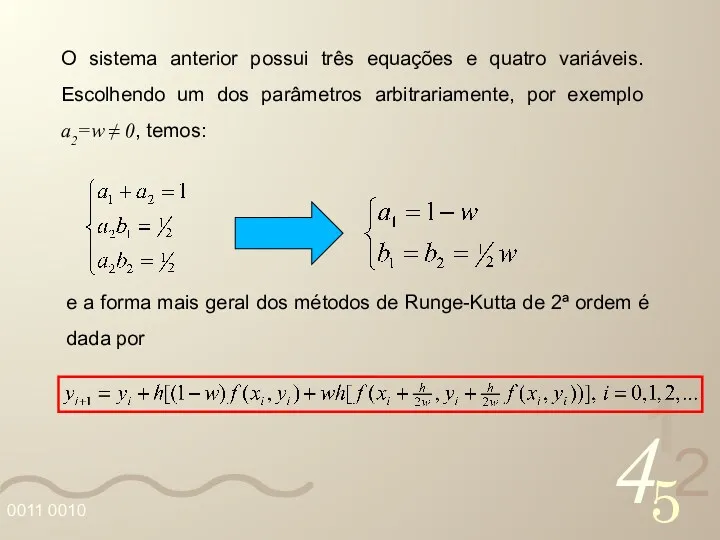
O sistema anterior possui três equações e quatro variáveis. Escolhendo um
O sistema anterior possui três equações e quatro variáveis. Escolhendo um
MÉTODOS DE RUNGE-KUTTA
DE
ORDENS SUPERIORES
MÉTODOS DE RUNGE-KUTTA
DE
ORDENS SUPERIORES
De forma análoga, pode-se construir métodos de 3ª ordem, 4ª ordem,
De forma análoga, pode-se construir métodos de 3ª ordem, 4ª ordem,
4ª ordem
onde
4ª ordem
onde
OBSERVAÇÃO:
Os métodos de Runge-Kutta, apesar de serem auto-iniciáveis (pois são de
OBSERVAÇÃO:
Os métodos de Runge-Kutta, apesar de serem auto-iniciáveis (pois são de
MÉTODOS DO PONTO
MÉDIO
MÉTODOS DO PONTO
MÉDIO
Considere agora o desenvolvimento de y(xi + h) e y(xi −
Considere agora o desenvolvimento de y(xi + h) e y(xi −
Considerando apenas o primeiro termo do lado direito da expansão acima,
Considerando apenas o primeiro termo do lado direito da expansão acima,
Série de Taylor:
Seja f uma função com derivadas de todas as
Série de Taylor:
Seja f uma função com derivadas de todas as
Exemplo:
Desenvolver f(x) = ln(x) , em torno de x = 1.
Assim,
Exemplo:
Desenvolver f(x) = ln(x) , em torno de x = 1.
Assim,
Portanto,
Portanto,
MÉTODOS DE PASSO MÚLTIPLO
BASEADOS EM INTEGRAÇÃO NUMÉRICA
MÉTODOS DE PASSO MÚLTIPLO
BASEADOS EM INTEGRAÇÃO NUMÉRICA
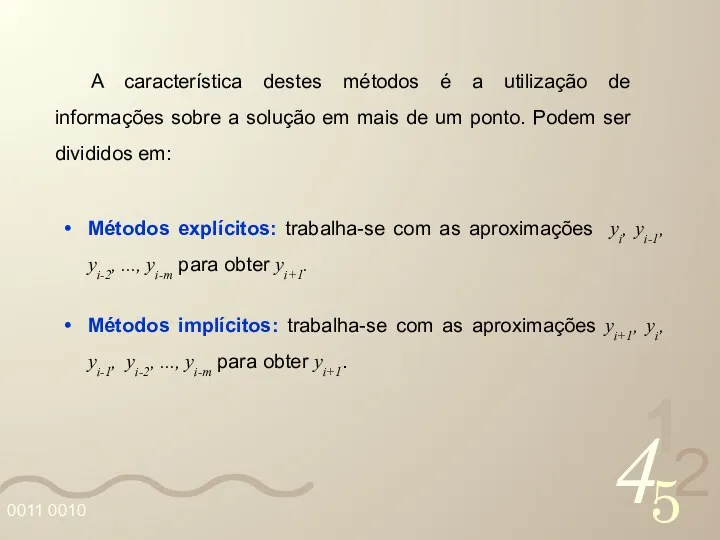
A característica destes métodos é a utilização de informações sobre a
A característica destes métodos é a utilização de informações sobre a
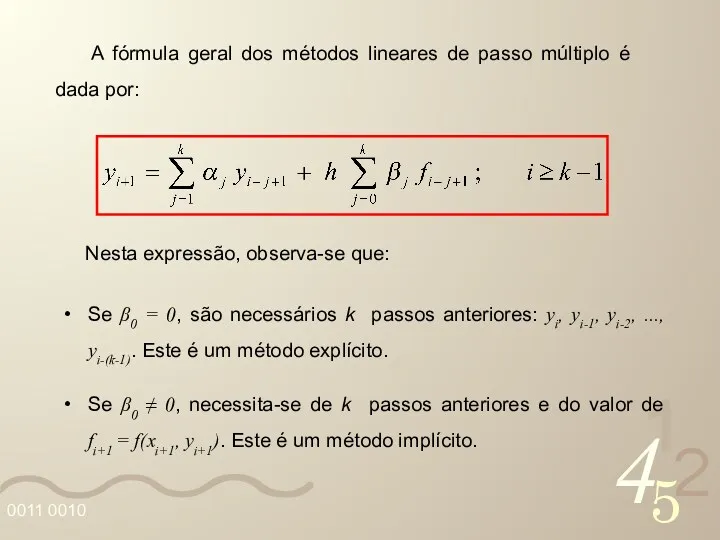
A fórmula geral dos métodos lineares de passo múltiplo é dada
A fórmula geral dos métodos lineares de passo múltiplo é dada
MÉTODO DE ADAMS - BASHFORTH
MÉTODO DE ADAMS - BASHFORTH
Estes métodos baseiam-se na idéia de integrar a equação diferencial ordinária
Estes métodos baseiam-se na idéia de integrar a equação diferencial ordinária
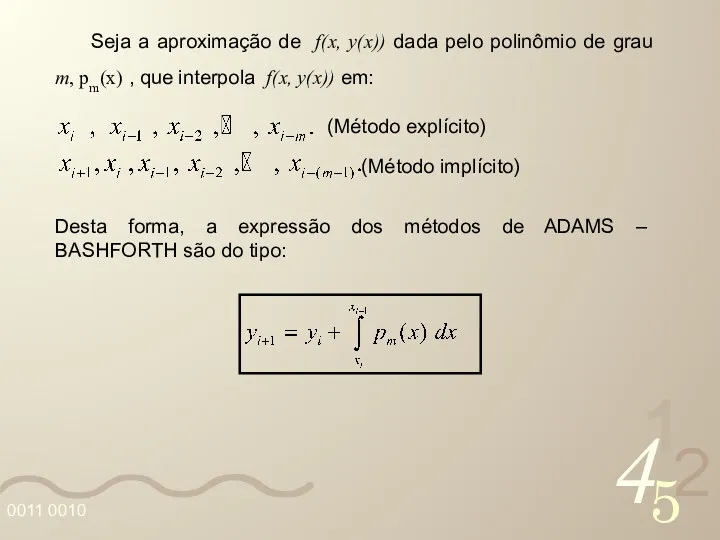
Seja a aproximação de f(x, y(x)) dada pelo polinômio de grau
Seja a aproximação de f(x, y(x)) dada pelo polinômio de grau
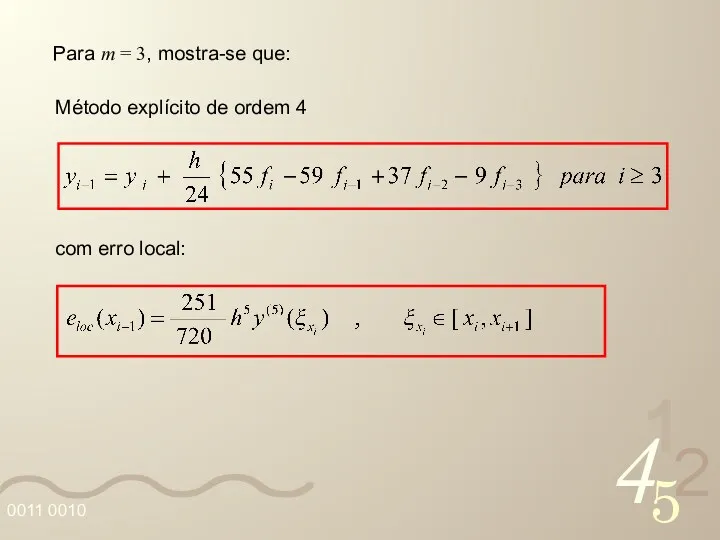
Para m = 3, mostra-se que:
com erro local:
Método explícito de ordem
Para m = 3, mostra-se que:
com erro local:
Método explícito de ordem
Para m = 3, mostra-se que:
com erro local:
Método implícito de ordem
Para m = 3, mostra-se que:
com erro local:
Método implícito de ordem
MÉTODO PREDITOR – CORRETOR DE ADAMS-MOULTON
MÉTODO PREDITOR – CORRETOR DE ADAMS-MOULTON
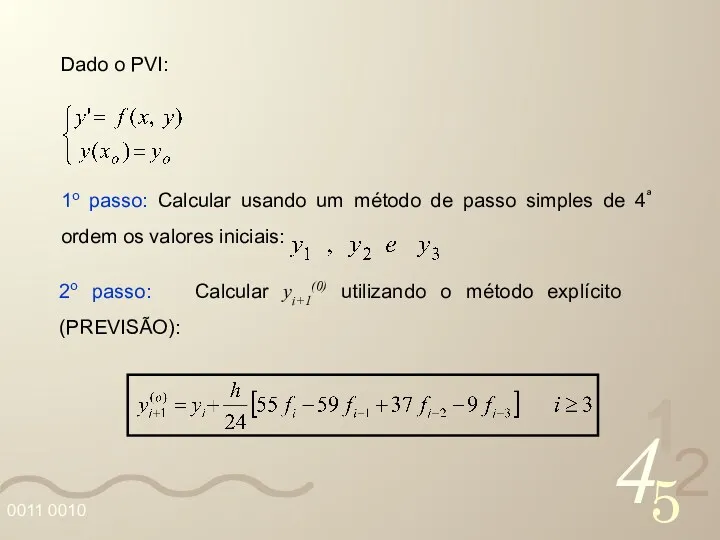
Dado o PVI:
1o passo: Calcular usando um método de passo simples
Dado o PVI:
1o passo: Calcular usando um método de passo simples
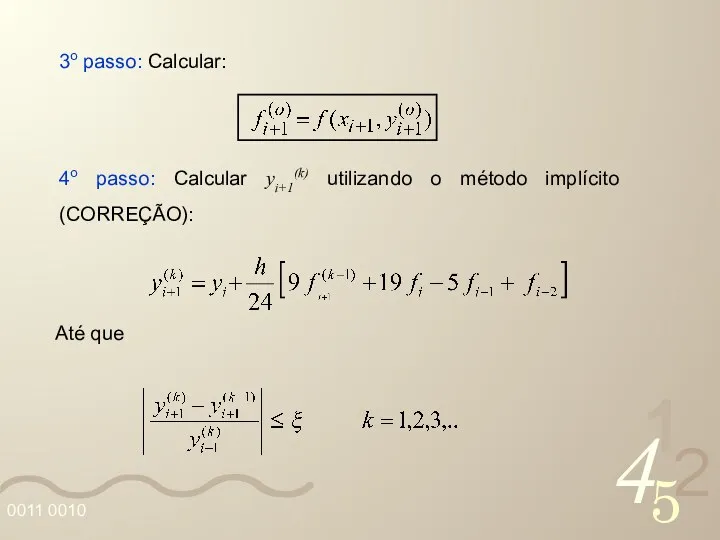
3o passo: Calcular:
4o passo: Calcular yi+1(k) utilizando o método implícito
3o passo: Calcular:
4o passo: Calcular yi+1(k) utilizando o método implícito
EQUAÇÃO DIFERENCIAL DE ORDEM M
EQUAÇÃO DIFERENCIAL DE ORDEM M
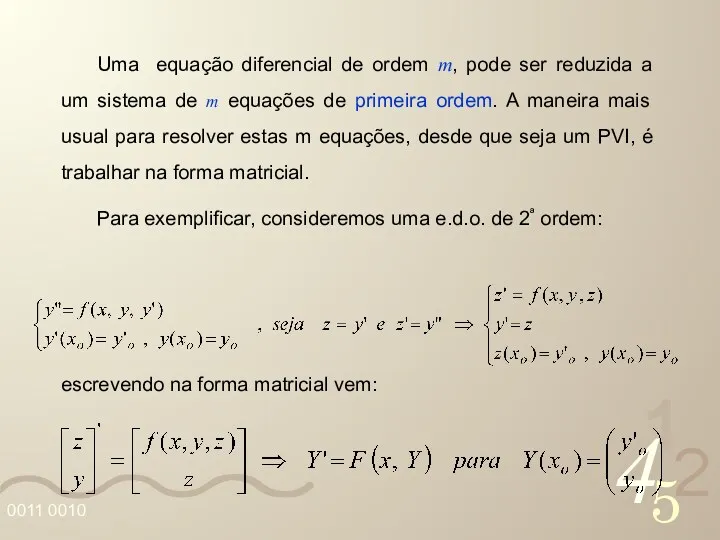
Uma equação diferencial de ordem m, pode ser reduzida a um
Uma equação diferencial de ordem m, pode ser reduzida a um
 Способы решения уравнений. Графический способ
Способы решения уравнений. Графический способ Презентация к уроку Скорость сближения. Скорость удаления 4 класс
Презентация к уроку Скорость сближения. Скорость удаления 4 класс Математическое моделирование. Значимость коэффициентов регрессии
Математическое моделирование. Значимость коэффициентов регрессии Математика вокруг нас
Математика вокруг нас Графический способ решения систем уравнений
Графический способ решения систем уравнений Сфера. Уравнение сферы
Сфера. Уравнение сферы Measures of variation. Week 4 (1)
Measures of variation. Week 4 (1) Создание проблемных ситуаций через умышленно допущенные учителем ошибки
Создание проблемных ситуаций через умышленно допущенные учителем ошибки Задачі на рух
Задачі на рух Урок математики в 1 классе по теме Число пять. Цифра 5.
Урок математики в 1 классе по теме Число пять. Цифра 5. Найди частное
Найди частное Квадратные корни. Арифметический квадратный корень
Квадратные корни. Арифметический квадратный корень Сложение и вычитание чисел в пределах 3
Сложение и вычитание чисел в пределах 3 конспект по ФЭМП В гости к бабушке для второй младшей группы
конспект по ФЭМП В гости к бабушке для второй младшей группы Действия с десятичными дробями (5 класс)
Действия с десятичными дробями (5 класс) Уравнение плоскости, проходящей через три точки
Уравнение плоскости, проходящей через три точки Числа 41 – 90. Таблиця сотня. Задача на знаходження невідомого доданка. Урок №97
Числа 41 – 90. Таблиця сотня. Задача на знаходження невідомого доданка. Урок №97 Квадратный трехчлен (часть 1)
Квадратный трехчлен (часть 1) Презентация по математике. Таблица умножения на 8
Презентация по математике. Таблица умножения на 8 Квадратный корень из дроби
Квадратный корень из дроби Определение угла. Развёрнутый угол
Определение угла. Развёрнутый угол Развитие познавательной активности младших школьников на уроках математики.
Развитие познавательной активности младших школьников на уроках математики. Применение логарифмов в специальности. ТОРАТ
Применение логарифмов в специальности. ТОРАТ Конспект открытого урока по математике в 4 классе по теме Соотношение единиц длины
Конспект открытого урока по математике в 4 классе по теме Соотношение единиц длины Пропорция. Основное свойство пропорции
Пропорция. Основное свойство пропорции Перевод целого числа из произвольной системы счисления в десятичную
Перевод целого числа из произвольной системы счисления в десятичную Неделя математики
Неделя математики Решение составных уравнений
Решение составных уравнений