- Теория дискретных отображений

Содержание
- 2. 1. Динамическая система и ее математическая модель Динамическая система (ДС) - это любой объект или процесс,
- 3. Математическая модель ДС считается заданной, если введены параметры (координаты) системы, определяющие однозначно ее состояние, и указан
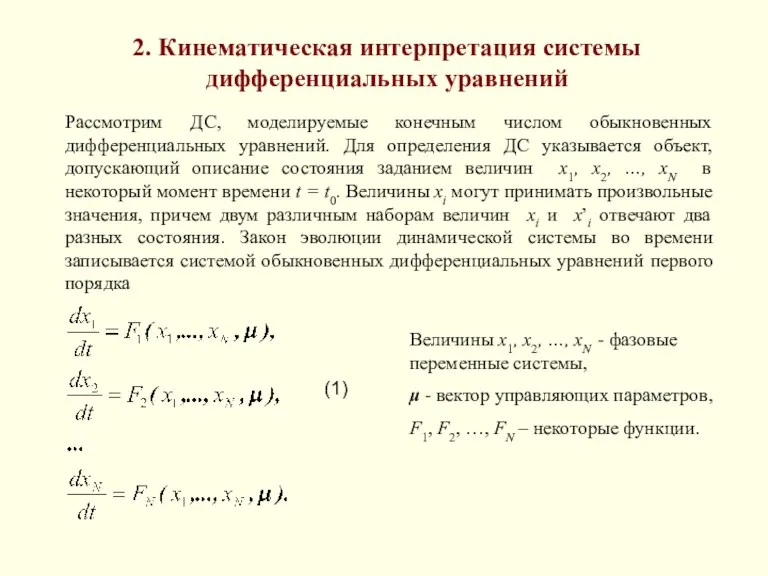
- 4. 2. Кинематическая интерпретация системы дифференциальных уравнений Рассмотрим ДС, моделируемые конечным числом обыкновенных дифференциальных уравнений. Для определения
- 5. Если рассматривать величины x1, x2, …, xN как координаты точки x в N-мерном пространстве, то получается
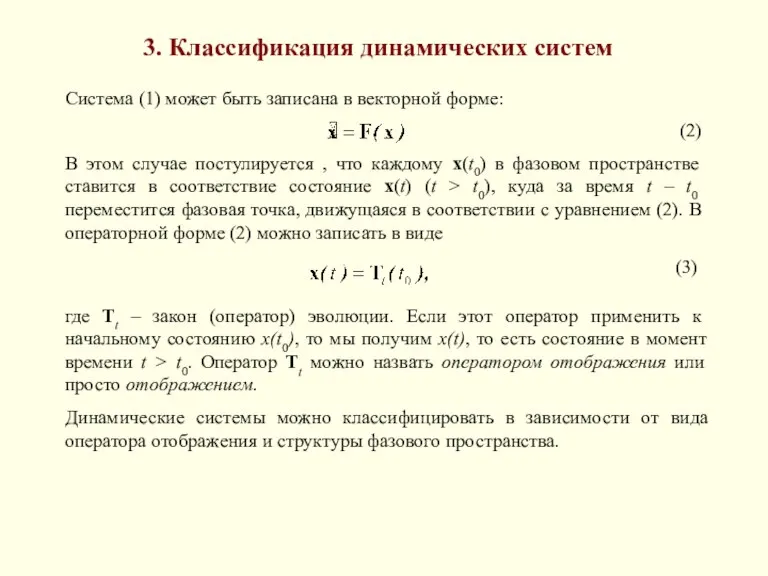
- 6. 3. Классификация динамических систем Система (1) может быть записана в векторной форме: (2) В этом случае
- 7. Если оператор предусматривает только линейные преобразования начального состояния, то он называется линейным. Линейный оператор обладает свойством
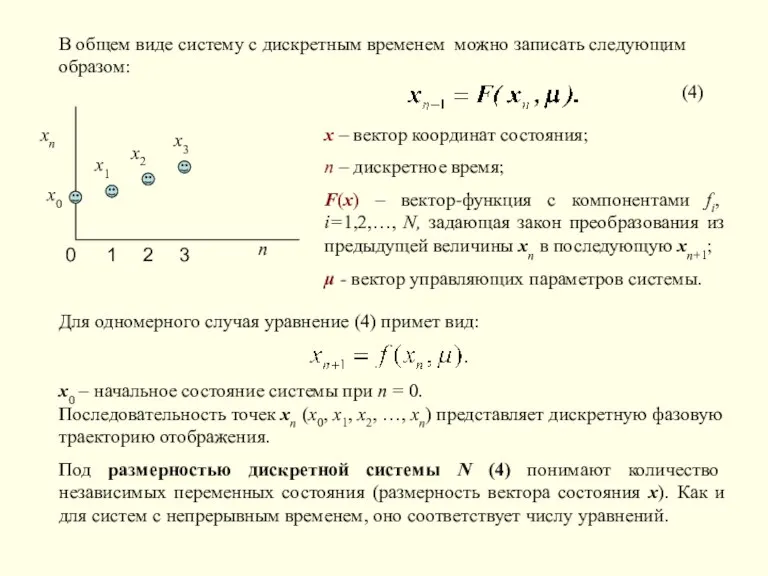
- 8. xn x0 n 0 1 2 x1 x2 x3 3 В общем виде систему с дискретным
- 9. Причины существования дискретных динамических систем. Многие процессы в природе имеют дискретный характер. Например, длительность светового дня
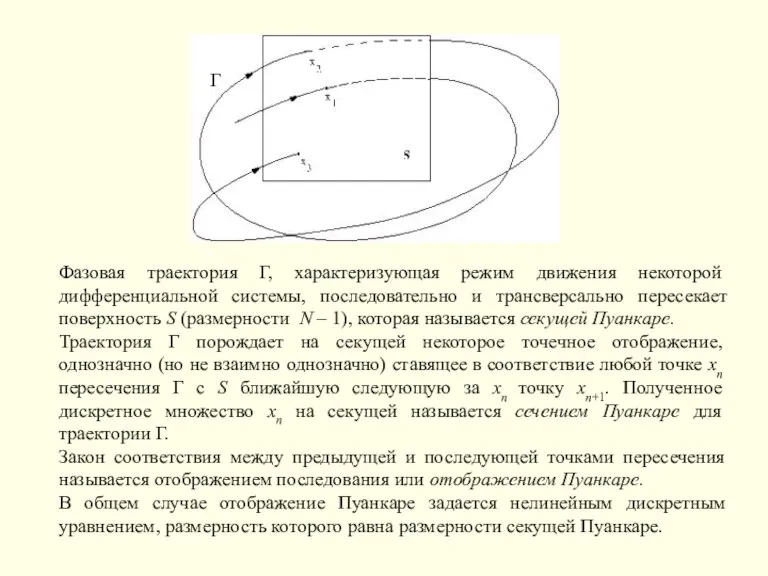
- 10. Г Фазовая траектория Г, характеризующая режим движения некоторой дифференциальной системы, последовательно и трансверсально пересекает поверхность S
- 11. От любой динамической системы с непрерывным временем можно перейти к соответствующему отображению, которое однозначно задается выбранным
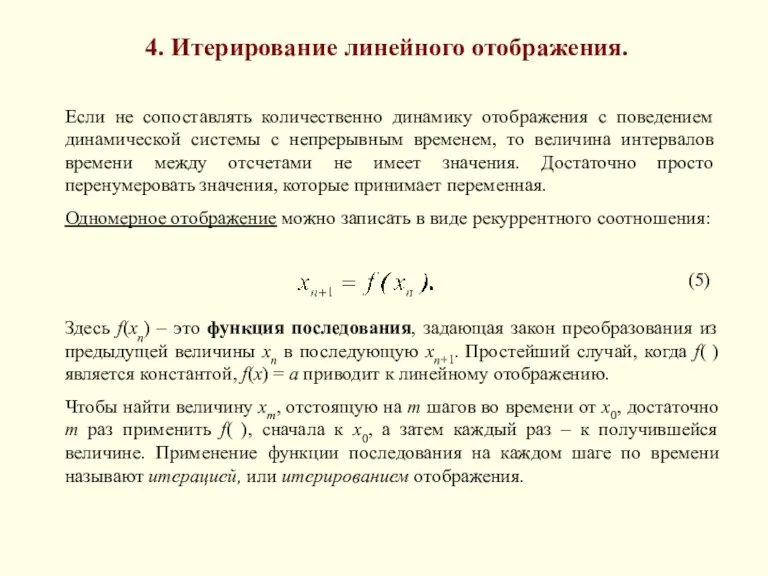
- 12. 4. Итерирование линейного отображения. Если не сопоставлять количественно динамику отображения с поведением динамической системы с непрерывным
- 13. Проделаем процедуру итерирования на примере линейного отображения xn+1 = axn : m-кратное применение функции f( )
- 14. При a > 1 значение xn неограниченно увеличивается по закону геометрической прогрессии. Точное равенство a =
- 16. Скачать презентацию
1. Динамическая система и ее математическая модель
Динамическая система (ДС) - это
1. Динамическая система и ее математическая модель
Динамическая система (ДС) - это
Математическая модель ДС считается заданной, если введены параметры (координаты) системы, определяющие
Математическая модель ДС считается заданной, если введены параметры (координаты) системы, определяющие
2. Кинематическая интерпретация системы дифференциальных уравнений
Рассмотрим ДС, моделируемые конечным числом обыкновенных
2. Кинематическая интерпретация системы дифференциальных уравнений
Рассмотрим ДС, моделируемые конечным числом обыкновенных
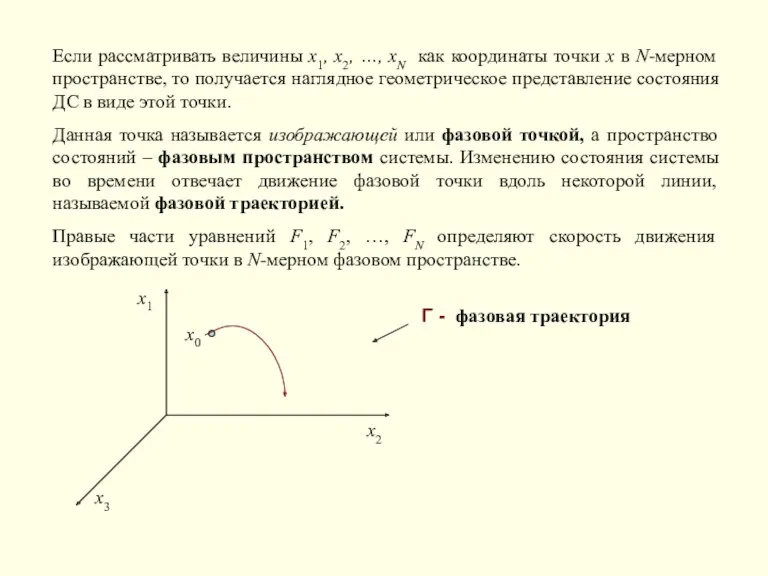
Если рассматривать величины x1, x2, …, xN как координаты точки x
Если рассматривать величины x1, x2, …, xN как координаты точки x
3. Классификация динамических систем
Система (1) может быть записана в векторной форме:
3. Классификация динамических систем
Система (1) может быть записана в векторной форме:
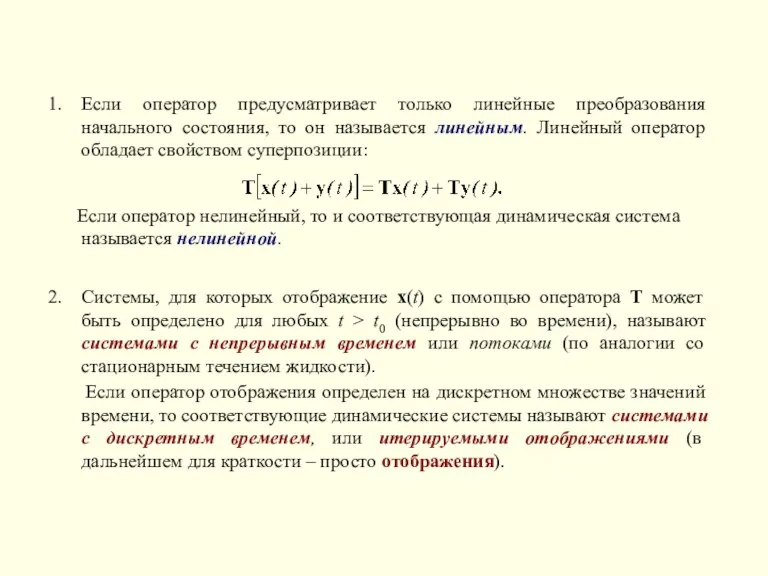
Если оператор предусматривает только линейные преобразования начального состояния, то он называется
Если оператор предусматривает только линейные преобразования начального состояния, то он называется
xn
x0
n
0
1
2
x1
x2
x3
3
В общем виде систему с дискретным временем можно записать следующим образом:
(4)
x
xn
x0
n
0
1
2
x1
x2
x3
3
В общем виде систему с дискретным временем можно записать следующим образом:
(4)
x
Причины существования дискретных динамических систем.
Многие процессы в природе имеют дискретный характер.
Причины существования дискретных динамических систем.
Многие процессы в природе имеют дискретный характер.
Г
Фазовая траектория Г, характеризующая режим движения некоторой дифференциальной системы, последовательно и
Г
Фазовая траектория Г, характеризующая режим движения некоторой дифференциальной системы, последовательно и
От любой динамической системы с непрерывным временем можно перейти к соответствующему
4. Итерирование линейного отображения.
Если не сопоставлять количественно динамику отображения с
4. Итерирование линейного отображения.
Если не сопоставлять количественно динамику отображения с
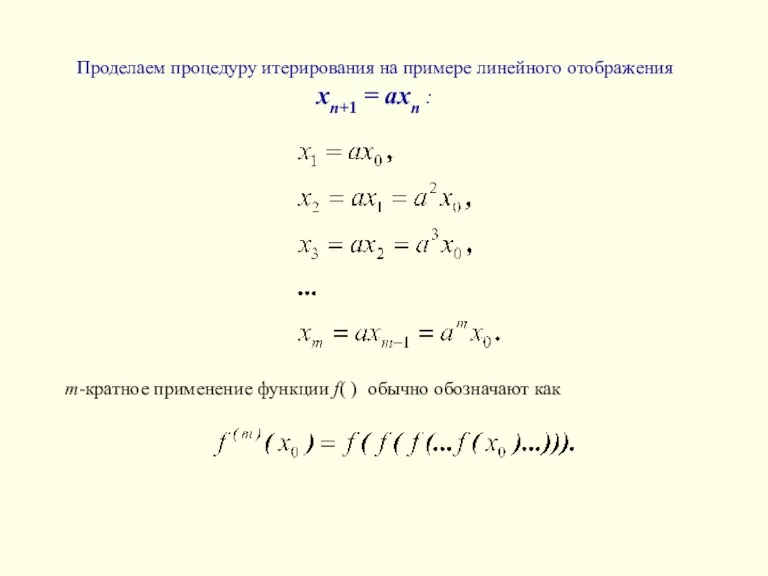
Проделаем процедуру итерирования на примере линейного отображения xn+1 = axn :
m-кратное
Проделаем процедуру итерирования на примере линейного отображения xn+1 = axn :
m-кратное
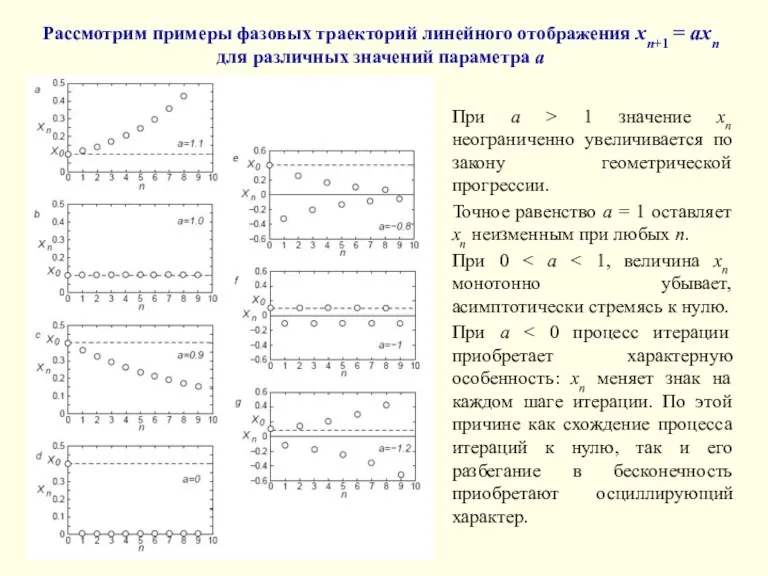
При a > 1 значение xn неограниченно увеличивается по закону геометрической
При a > 1 значение xn неограниченно увеличивается по закону геометрической
 Объемы тел. 11 класс
Объемы тел. 11 класс Начала математического анализа
Начала математического анализа Презентация к уроку математики Признаки предметов. Построение таблиц или ряда предметов по определенному правилу.
Презентация к уроку математики Признаки предметов. Построение таблиц или ряда предметов по определенному правилу. Нахождение расстояния между двумя точками на координатной прямой
Нахождение расстояния между двумя точками на координатной прямой ЛИНЕЙНЫЕ И СТОЛБЧАТЫЕ ДИАГРАММЫ
ЛИНЕЙНЫЕ И СТОЛБЧАТЫЕ ДИАГРАММЫ Активизация познавательной деятельности обучающихся с нарушением интеллекта на уроках математики
Активизация познавательной деятельности обучающихся с нарушением интеллекта на уроках математики Единицы измерения длины в разное время и в разных странах
Единицы измерения длины в разное время и в разных странах Решение задач по теме Площадь параллелограмма, треугольника, трапеции
Решение задач по теме Площадь параллелограмма, треугольника, трапеции Анимашки для оформления презентаций в Microsoft Offis Power Point №4
Анимашки для оформления презентаций в Microsoft Offis Power Point №4 Подготовка к ЕГЭ по геометрии
Подготовка к ЕГЭ по геометрии Ведение в вейлет преобразование
Ведение в вейлет преобразование Вспоминаем, повторяем презентация к уроку закрепления изученного материала по математике в 1 классе
Вспоминаем, повторяем презентация к уроку закрепления изученного материала по математике в 1 классе Рациональные числа
Рациональные числа Блез Паскаль (1623-1662 гг.)
Блез Паскаль (1623-1662 гг.) Тригонометрические неравенства
Тригонометрические неравенства Презентация к занятию Путешествие в сказку Диск
Презентация к занятию Путешествие в сказку Диск Деление обыкновенных дробей. 6 класс
Деление обыкновенных дробей. 6 класс Перпендикуляр и наклонные. Расстояние от точки до плоскости
Перпендикуляр и наклонные. Расстояние от точки до плоскости Таблица умножения и деления на 6
Таблица умножения и деления на 6 Модуль действительного числа, уравнения
Модуль действительного числа, уравнения Табличные случаи умножения и деления
Табличные случаи умножения и деления Брей-ринг. Игра по математике
Брей-ринг. Игра по математике Перевірка ділення множенням. Розв’язування задачі, оберненої до задачі на знаходження суми двох добутків
Перевірка ділення множенням. Розв’язування задачі, оберненої до задачі на знаходження суми двох добутків Прямоугольник и квадрат
Прямоугольник и квадрат Четырехугольная призма
Четырехугольная призма Функция и ее свойства. Обобщающий урок. 9 класс
Функция и ее свойства. Обобщающий урок. 9 класс Презентация открытого урока по математике в третьем классе на темуПлощадь прямоугольников
Презентация открытого урока по математике в третьем классе на темуПлощадь прямоугольников Функция графигінің асимптоталары
Функция графигінің асимптоталары