Типовые линейные алгоритмы регулирования; нелинейные позиционные алгоритмы регулирования презентация
- Типовые линейные алгоритмы регулирования; нелинейные позиционные алгоритмы регулирования

Содержание
- 2. В зависимости от свойств ОУ, технологических требований и возможных изменениях возмущающих воздействий применяются САР прерывистого и
- 3. В САР прерывистого действия применяются регyляторы, рабочий орган которых может принимать два фиксированных положения (позиции), соответствующих
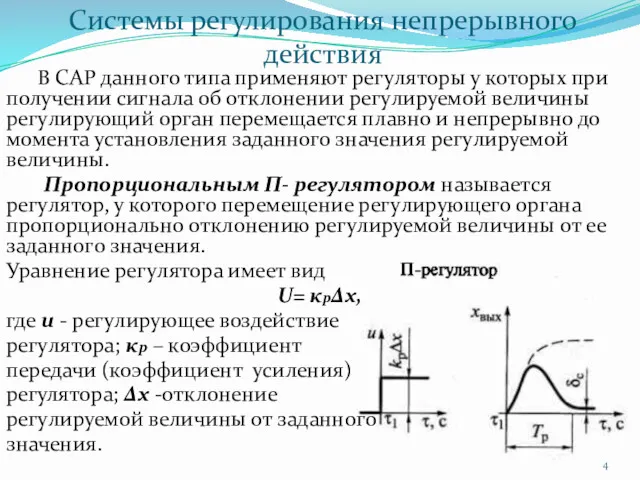
- 4. Системы регулирования непрерывного действия В САР данного типа применяют регyляторы у которых при получении сигнала об
- 5. Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в положение, отвечающее произошедшему на
- 6. Интегральным И-регyлятором называется регyлятор, у которого регулирующее воздействие пропорционaльно интегралу отклонения регyлируемой величины. Уравнение И-регyлятора имеет
- 7. Пропорционально - интегральным ПИ- регулятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от
- 8. Пропорционально – интегрально -дифференциальным регyлятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от
- 9. Преобразование Лапласа Одна из первых задач, которая была поставлена в теории управления – вычисление выхода системы
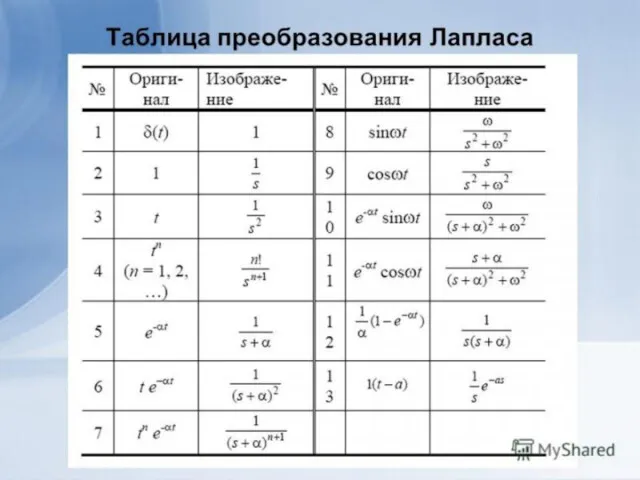
- 10. Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{ f (t)}: Функция F(s) называется
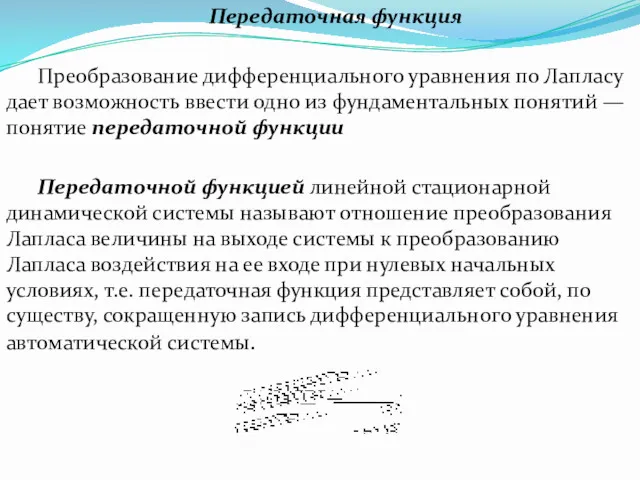
- 12. Передаточная функция Преобразование дифференциального уравнения по Лапласу дает возможность ввести одно из фундаментальных понятий — понятие
- 14. Скачать презентацию
В зависимости от свойств ОУ, технологических требований и возможных изменениях возмущающих
В зависимости от свойств ОУ, технологических требований и возможных изменениях возмущающих
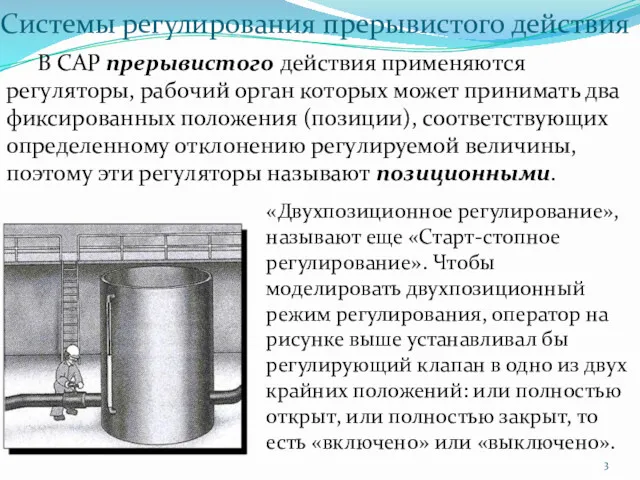
В САР прерывистого действия применяются регyляторы, рабочий орган которых может принимать
В САР прерывистого действия применяются регyляторы, рабочий орган которых может принимать
Системы регулирования непрерывного действия
В САР данного типа применяют регyляторы у которых
Системы регулирования непрерывного действия
В САР данного типа применяют регyляторы у которых
Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в
Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в
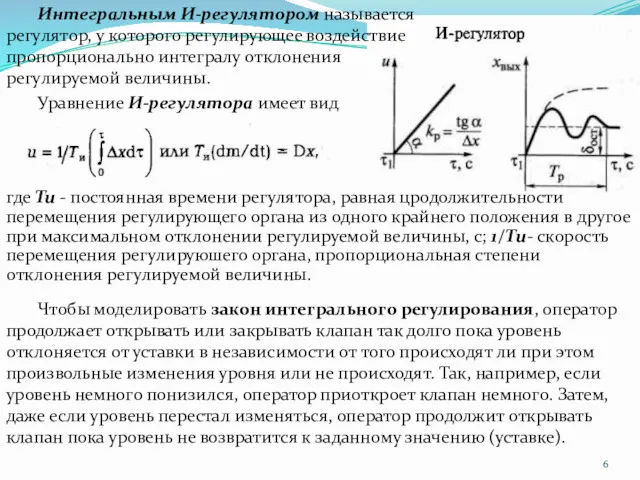
Интегральным И-регyлятором называется регyлятор, у которого регулирующее воздействие пропорционaльно интегралу отклонения
Интегральным И-регyлятором называется регyлятор, у которого регулирующее воздействие пропорционaльно интегралу отклонения
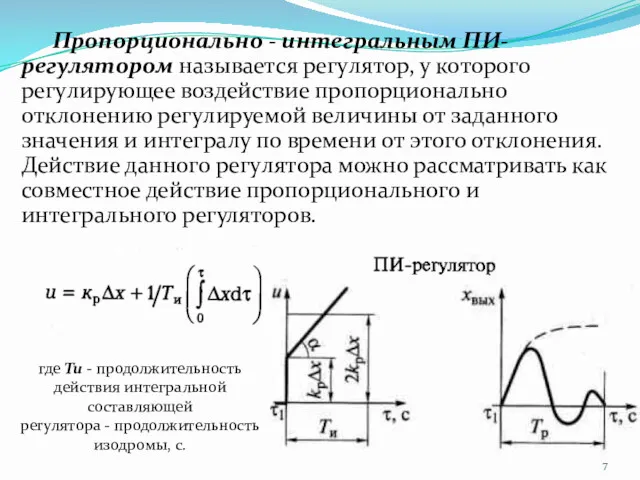
Пропорционально - интегральным ПИ- регулятором называется регyлятор, у которого регyлирующее воздействие
Пропорционально - интегральным ПИ- регулятором называется регyлятор, у которого регyлирующее воздействие
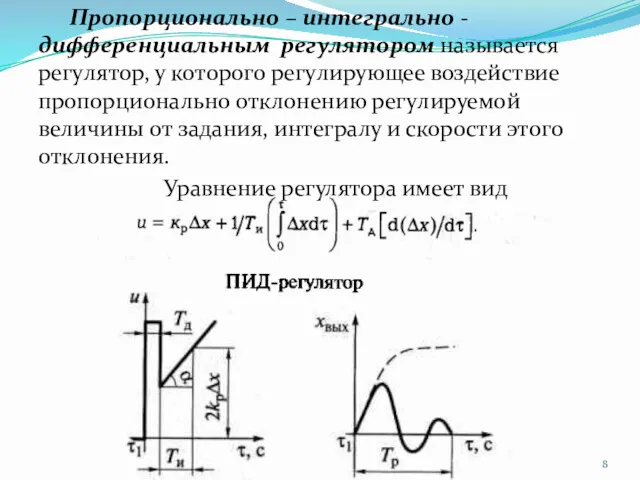
Пропорционально – интегрально -дифференциальным регyлятором называется регyлятор, у которого регyлирующее воздействие
Пропорционально – интегрально -дифференциальным регyлятором называется регyлятор, у которого регyлирующее воздействие
Преобразование Лапласа
Одна из первых задач, которая была поставлена в теории управления
Преобразование Лапласа
Одна из первых задач, которая была поставлена в теории управления
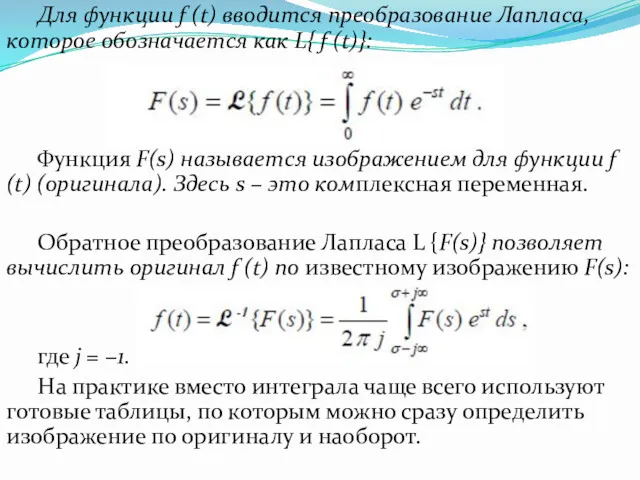
Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{
Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{
Передаточная функция
Преобразование дифференциального уравнения по Лапласу дает возможность ввести одно из
Передаточная функция
Преобразование дифференциального уравнения по Лапласу дает возможность ввести одно из
 презентация по наглядной геометрии
презентация по наглядной геометрии НОД чисел и НОК чисел
НОД чисел и НОК чисел Відсотки. Записати десятковий дріб у відсотках
Відсотки. Записати десятковий дріб у відсотках Корреляционно-регрессионный анализ: статистическое моделирование зависимостей
Корреляционно-регрессионный анализ: статистическое моделирование зависимостей Відстані в просторі
Відстані в просторі Удивительная цифра два
Удивительная цифра два Прямая и плоскость. Лекция 5
Прямая и плоскость. Лекция 5 Вписанные углы. Задачи на готовых чертежах
Вписанные углы. Задачи на готовых чертежах Столбчатые диаграммы
Столбчатые диаграммы Обратная функция
Обратная функция Теорема Пифагора
Теорема Пифагора Высказывания и операции над ними
Высказывания и операции над ними Логарифмы. Логарифмическая функция. Решение логарифмических уравнений
Логарифмы. Логарифмическая функция. Решение логарифмических уравнений Презентация к уроку математики Приметр многоугольника.
Презентация к уроку математики Приметр многоугольника. Выражения. Компоненты действия деления
Выражения. Компоненты действия деления Дифференциальные уравнении (1)
Дифференциальные уравнении (1) Длина окружности. Площадь круга
Длина окружности. Площадь круга Свойства прямоугольного треугольника. Геометрия 7 класс
Свойства прямоугольного треугольника. Геометрия 7 класс Средняя линия треугольника, 8 класс
Средняя линия треугольника, 8 класс 289097
289097 Движение. Виды движения. Симметрия
Движение. Виды движения. Симметрия Геометрия. Планиметрия. Параллелограмм, прямоугольник, ромб, квадрат, трапеция. Понятия и основные свойства
Геометрия. Планиметрия. Параллелограмм, прямоугольник, ромб, квадрат, трапеция. Понятия и основные свойства Отчёт о работе кружка
Отчёт о работе кружка Урок математики по теме Доли, 4 класс.
Урок математики по теме Доли, 4 класс. Портфолио Горошко Анны Ивановны
Портфолио Горошко Анны Ивановны Игра Ума палата. 5 класс
Игра Ума палата. 5 класс Величина угла. Измерение углов
Величина угла. Измерение углов Основные понятия об измерениях и средствах измерения
Основные понятия об измерениях и средствах измерения