- Инструкция по сборке робота из деталей ЛЕГО

Содержание
- 2. Уважаемые пользователи! Представляем вашему вниманию инструкцию по сборке робота из деталей «ЛЕГО», передвигающегося по заданной траектории
- 3. Последовательно соедините детали с микроконтроллером и присоедините кабели к соответствующим разъемам (рис. 2) Рис. 2
- 4. Присоедините к мотору штифты и балку со штифтами, разверните балку, закрепите и введите штифты в зацепление,
- 5. Последовательно введите в зацепление штифты, балку и квадратные балки; получившуюся деталь соедините с мотором (рис. 4)
- 6. Оси, диски и шины соедините и введите в зацепление с основанием робота (рис. 5) Рис. 5
- 7. Соедините средний мотор с балками и штифтами, добавьте к конструкции еще одну балку, ось и шестеренку
- 8. Ультразвуковой сенсор совместите с изогнутыми балками со штифтами и средним мотором, а также деталью, изображенной на
- 9. Объедините в одну конструкцию изогнутые балки со штифтами, ось, шестеренку и корпус робота (рис. 8) Рис.
- 11. Скачать презентацию
Уважаемые пользователи!
Представляем вашему вниманию инструкцию по сборке робота из деталей «ЛЕГО»,
Уважаемые пользователи!
Представляем вашему вниманию инструкцию по сборке робота из деталей «ЛЕГО»,
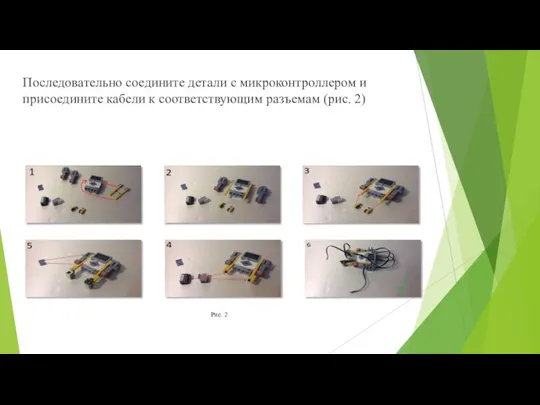
Последовательно соедините детали с микроконтроллером и присоедините кабели к соответствующим разъемам
Последовательно соедините детали с микроконтроллером и присоедините кабели к соответствующим разъемам
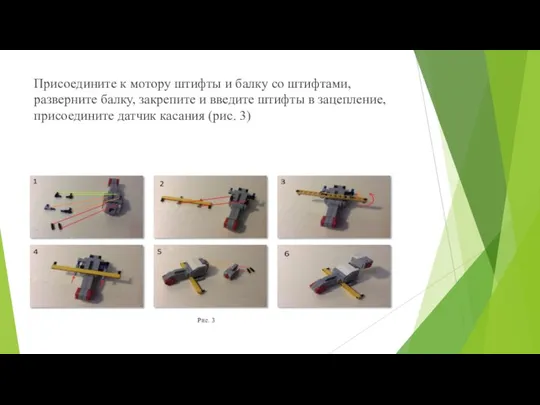
Присоедините к мотору штифты и балку со штифтами, разверните балку, закрепите
Присоедините к мотору штифты и балку со штифтами, разверните балку, закрепите
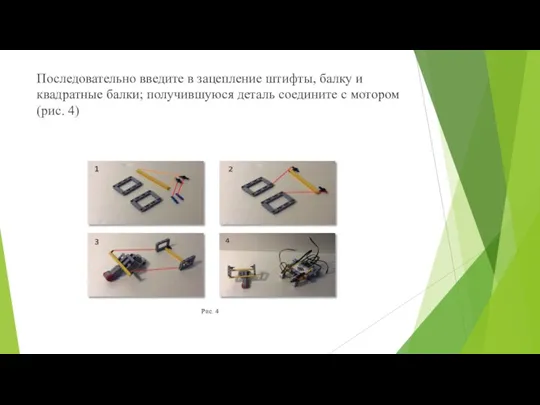
Последовательно введите в зацепление штифты, балку и квадратные балки; получившуюся деталь
Последовательно введите в зацепление штифты, балку и квадратные балки; получившуюся деталь
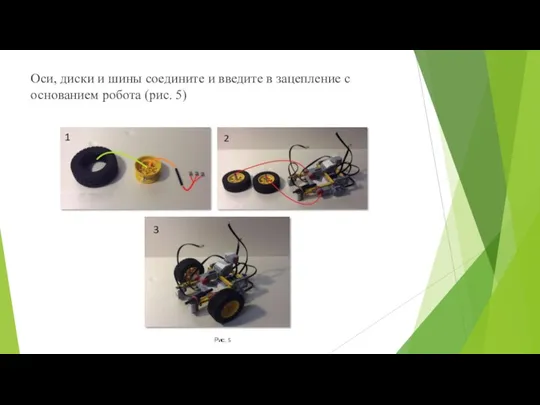
Оси, диски и шины соедините и введите в зацепление с основанием
Оси, диски и шины соедините и введите в зацепление с основанием
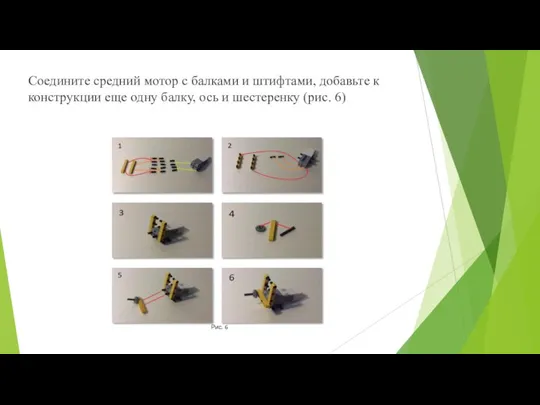
Соедините средний мотор с балками и штифтами, добавьте к конструкции еще
Соедините средний мотор с балками и штифтами, добавьте к конструкции еще
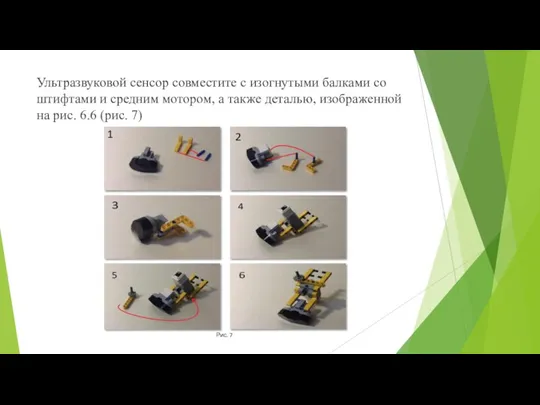
Ультразвуковой сенсор совместите с изогнутыми балками со штифтами и средним мотором,
Ультразвуковой сенсор совместите с изогнутыми балками со штифтами и средним мотором,

Объедините в одну конструкцию изогнутые балки со штифтами, ось, шестеренку и
Объедините в одну конструкцию изогнутые балки со штифтами, ось, шестеренку и
 Презентация ЭКОЛАНДИЯ
Презентация ЭКОЛАНДИЯ Подготовка выпускников к сдаче ОГЭ по математике (обобщение опыта)
Подготовка выпускников к сдаче ОГЭ по математике (обобщение опыта) Триггеры в презентации
Триггеры в презентации Презентация по теме Трудности адаптации первоклассников в школе
Презентация по теме Трудности адаптации первоклассников в школе Технология написания научной педагогической статьи
Технология написания научной педагогической статьи Развлечение Русская каша матушка наша
Развлечение Русская каша матушка наша Олимпиада Помогите найти ослику Иа хвостик
Олимпиада Помогите найти ослику Иа хвостик Программа для детей с признаками одаренности Звездная тропинка для детей от 4 до 7 лет
Программа для детей с признаками одаренности Звездная тропинка для детей от 4 до 7 лет Четвертый лишний (домашние животные) Часть 2
Четвертый лишний (домашние животные) Часть 2 Все профессии важны. От игры к знаниям! Познавательная игра
Все профессии важны. От игры к знаниям! Познавательная игра Мой профессиональный выбор. (8 класс)
Мой профессиональный выбор. (8 класс) Реализация проблемного обучения в начальной школе
Реализация проблемного обучения в начальной школе 8 марта. Викторина для девочек
8 марта. Викторина для девочек Рекомендации для составления папки классного руководителя
Рекомендации для составления папки классного руководителя Звітна документація проекту на виготовлення виробу вишита картина (годинник)
Звітна документація проекту на виготовлення виробу вишита картина (годинник) педагогический советПрофессионализм и педагогическое мастерство
педагогический советПрофессионализм и педагогическое мастерство Логопедическая работа по устранению сигматизма
Логопедическая работа по устранению сигматизма Возможности использования робототехники во внеурочной деятельности
Возможности использования робототехники во внеурочной деятельности Последовательность изготовления юбки
Последовательность изготовления юбки Методика формирования естественнонаучных понятий. Методы обучения естествознанию. (Тема 2)
Методика формирования естественнонаучных понятий. Методы обучения естествознанию. (Тема 2) Памятники педагогической мысли Руси XI-XV века
Памятники педагогической мысли Руси XI-XV века Весеннее пробуждение. Презентация для детей подготовительной группы
Весеннее пробуждение. Презентация для детей подготовительной группы Презентация внеклассного мероприятия Жизнь как деяние, 11 класс
Презентация внеклассного мероприятия Жизнь как деяние, 11 класс Профориентационная экспедиция Новые горизонты. Проект
Профориентационная экспедиция Новые горизонты. Проект Портфолио модели и фотографа
Портфолио модели и фотографа Жыл мезгілдері. Жанды табиғат
Жыл мезгілдері. Жанды табиғат Математический турнир в 8 классе
Математический турнир в 8 классе Автоматизация звука Ц
Автоматизация звука Ц