- Урок по теме Построение сопряжений

Содержание
- 2. Содержание Движение а) Отображение плоскости на себя б) Понятие движения в) Осевая симметрия г) Параллельный перенос
- 3. Движение ?Отображение плоскости на себя Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят, что дано отображение
- 4. ? Понятие движения Любое отображение, сохраняющее расстояния между точками называется движением. Таким образом: Движение плоскости –
- 5. ? Осевая симметрия a А А1 ось симметрии Осевая симметрия — вид движения, при котором множеством
- 6. Симметрия относительно точки: О – фиксированная точка A – произвольная точка О А А1
- 7. ? Параллельный перенос Параллельным переносом на вектор а называется отображение плоскости на себя при котором каждая
- 8. Параллельный перенос треугольника на заданный вектор а а А В С С1 А1 В1 Доказательство: 1)
- 9. Параллельный перенос окружности на заданный вектор а О а О1 Доказательство: Докажем, что окружность О1 =
- 10. Сопряжение Сопряжением называют плавный переход одной линии в другую. Для того чтобы построить сопряжение, нужно найти
- 11. 1. Сопряжение прямого угла О – центр сопряжения R – произвольная величина A, B – точки
- 12. 2. Сопряжение острого угла О – центр сопряжения A, B – точки сопряжения R – произвольная
- 13. 3. Сопряжение тупого угла О – центр сопряжения A, B – точки сопряжения R – произвольная
- 14. 4. Сопряжение параллельных прямых линий О – центр сопряжения A, B – точки сопряжения R –
- 16. Скачать презентацию
Содержание
Движение
а) Отображение плоскости на себя
б) Понятие движения
в) Осевая симметрия
г)
Содержание
Движение
а) Отображение плоскости на себя
б) Понятие движения
в) Осевая симметрия
г)
Движение
?Отображение плоскости на себя
Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят,
Движение
?Отображение плоскости на себя
Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят,
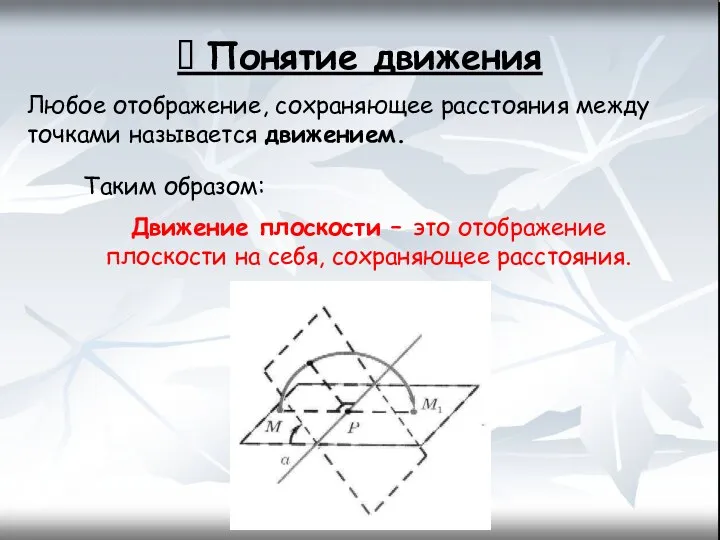
? Понятие движения
Любое отображение, сохраняющее расстояния между точками называется движением.
Таким образом:
? Понятие движения
Любое отображение, сохраняющее расстояния между точками называется движением.
Таким образом:
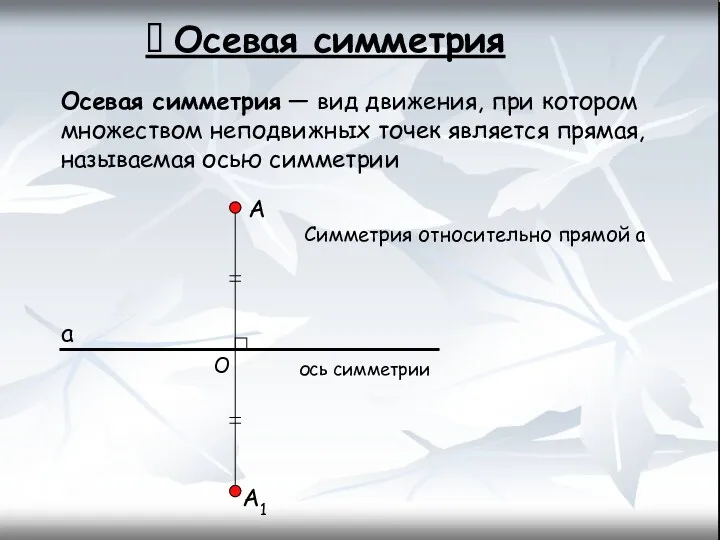
? Осевая симметрия
a
А
А1
ось симметрии
Осевая симметрия — вид движения, при котором множеством неподвижных точек является прямая,
? Осевая симметрия
a
А
А1
ось симметрии
Осевая симметрия — вид движения, при котором множеством неподвижных точек является прямая,

Симметрия относительно точки:
О – фиксированная точка
A – произвольная точка
О
А
А1
Симметрия относительно точки:
О – фиксированная точка
A – произвольная точка
О
А
А1

? Параллельный перенос
Параллельным переносом на вектор а называется отображение плоскости на
? Параллельный перенос
Параллельным переносом на вектор а называется отображение плоскости на
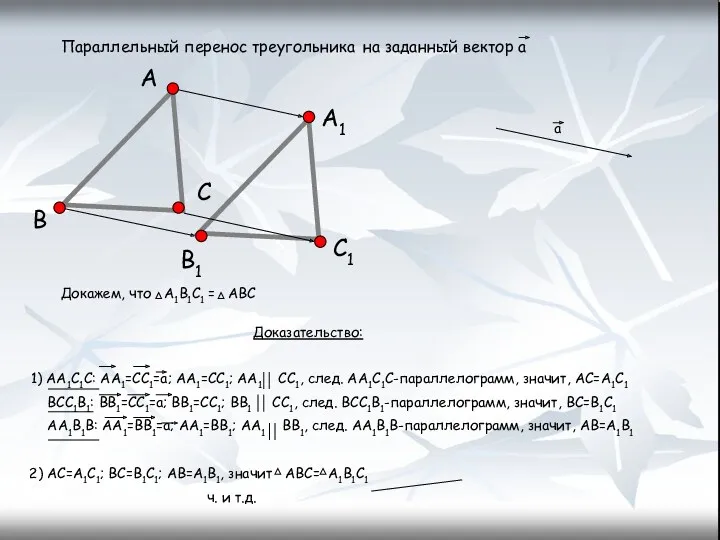
Параллельный перенос треугольника на заданный вектор а
а
А
В
С
С1
А1
В1
Доказательство:
1) АА1С1С: АА1=СС1=а; АА1=СС1;
Параллельный перенос треугольника на заданный вектор а
а
А
В
С
С1
А1
В1
Доказательство:
1) АА1С1С: АА1=СС1=а; АА1=СС1;
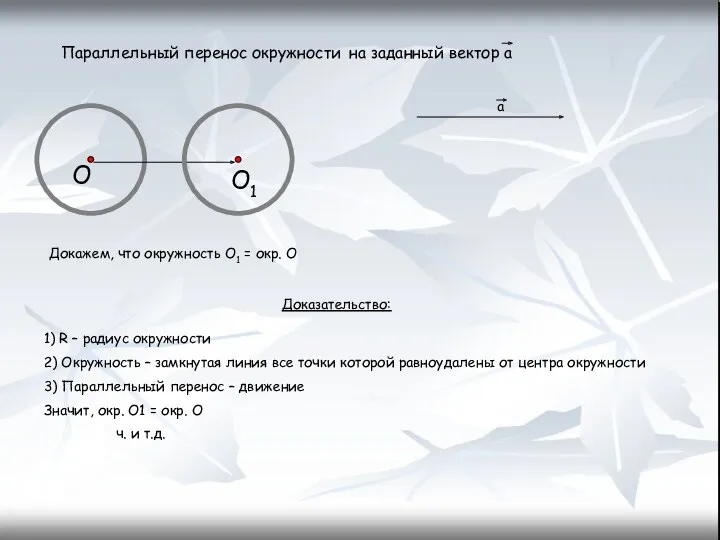
Параллельный перенос окружности на заданный вектор а
О
а
О1
Доказательство:
Докажем, что окружность О1 =
Параллельный перенос окружности на заданный вектор а
О
а
О1
Доказательство:
Докажем, что окружность О1 =
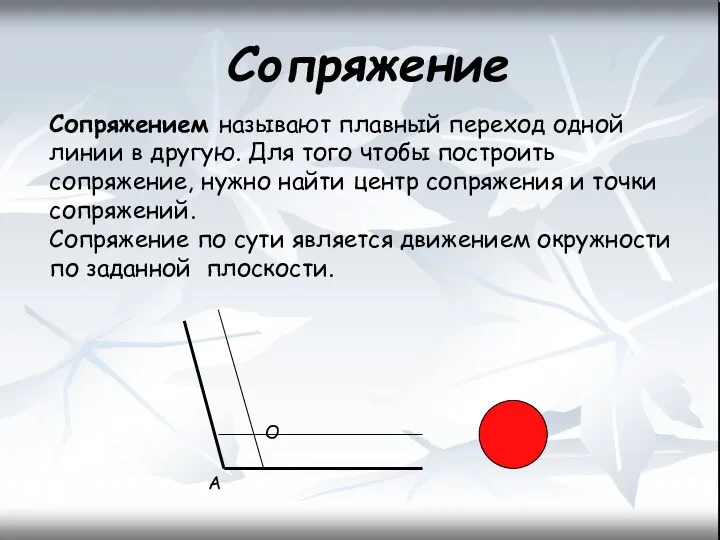
Сопряжение
Сопряжением называют плавный переход одной линии в другую. Для того
Сопряжение
Сопряжением называют плавный переход одной линии в другую. Для того
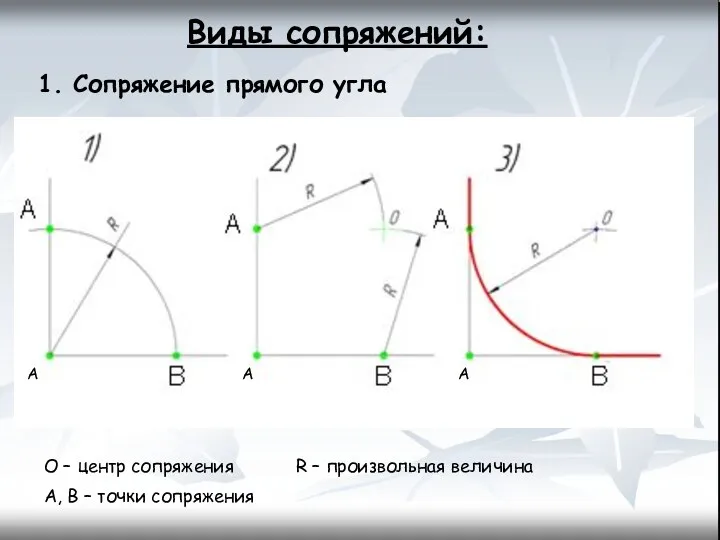
1. Сопряжение прямого угла
О – центр сопряжения R – произвольная величина
A, B
1. Сопряжение прямого угла
О – центр сопряжения R – произвольная величина
A, B
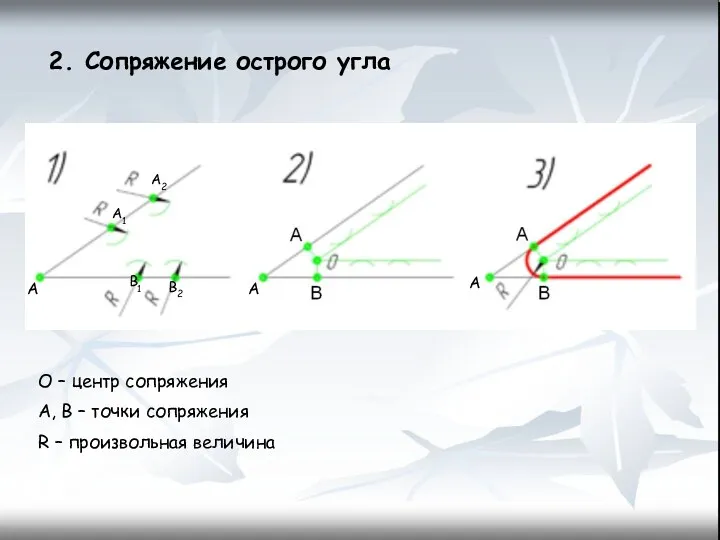
2. Сопряжение острого угла
О – центр сопряжения
A, B – точки сопряжения
R
2. Сопряжение острого угла
О – центр сопряжения
A, B – точки сопряжения
R
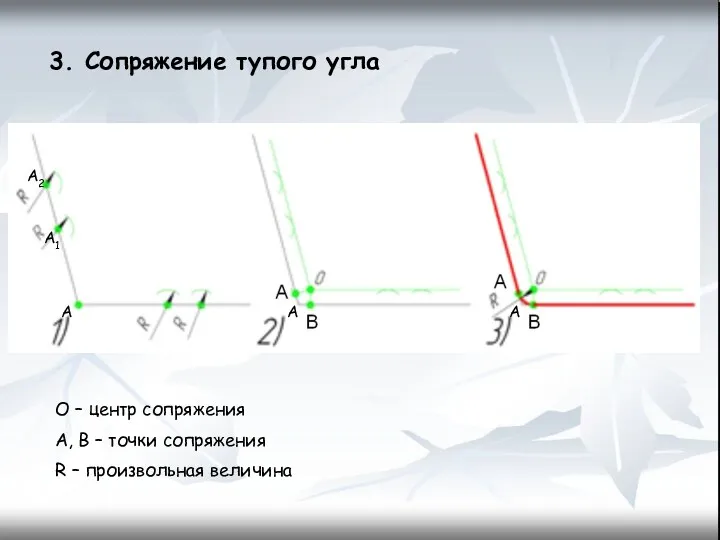
3. Сопряжение тупого угла
О – центр сопряжения
A, B – точки сопряжения
R
3. Сопряжение тупого угла
О – центр сопряжения
A, B – точки сопряжения
R
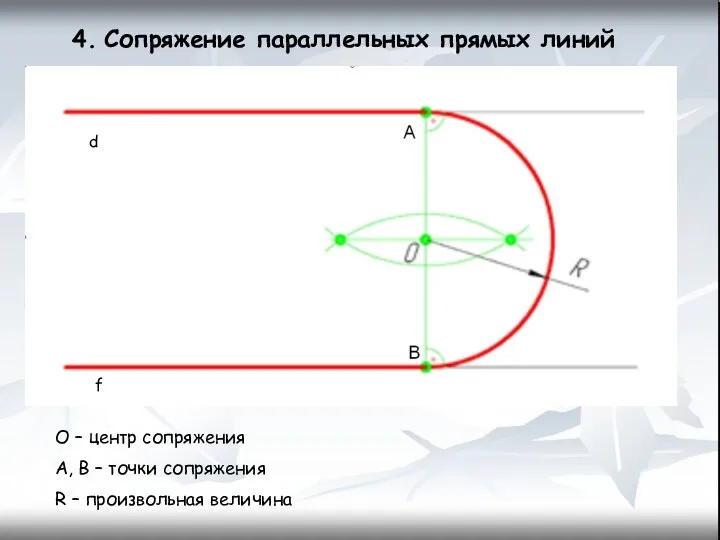
4. Сопряжение параллельных прямых линий
О – центр сопряжения
A, B – точки
4. Сопряжение параллельных прямых линий
О – центр сопряжения
A, B – точки
 Мастер - класс Семья, традиция, игрушка
Мастер - класс Семья, традиция, игрушка Презентация. Мастер-класс по изготовлению снежинок из бумаги.
Презентация. Мастер-класс по изготовлению снежинок из бумаги. Развитие продуктивной деятельности дошкольников
Развитие продуктивной деятельности дошкольников Презентация к уроку изобразительного искусства по программе Б.М.Неменского в 3 классе по теме: Посуда у тебя дома .
Презентация к уроку изобразительного искусства по программе Б.М.Неменского в 3 классе по теме: Посуда у тебя дома . Технология вышивания для леворуких детей.
Технология вышивания для леворуких детей. Творческий проект Мы сделали это!
Творческий проект Мы сделали это! Олимпийские символы 2014 года для 3 класса.
Олимпийские символы 2014 года для 3 класса. Украшаем посуду узором с растительным элементом.
Украшаем посуду узором с растительным элементом. Работы в технике: Айрис фолдинг Диск
Работы в технике: Айрис фолдинг Диск Идем в кукольный театр!
Идем в кукольный театр! Выразительные возможности графики
Выразительные возможности графики Презентация к уроку ИЗО 1 класс Красивые рыбы из раздела Ты украшаешь
Презентация к уроку ИЗО 1 класс Красивые рыбы из раздела Ты украшаешь Презентация к открытому уроку Я-парикмахер
Презентация к открытому уроку Я-парикмахер Формирование у учащихся школы 8 вида с ДЦП морально-психологической готовности к различным видам трудовой деятельности через трудовую деятельность.
Формирование у учащихся школы 8 вида с ДЦП морально-психологической готовности к различным видам трудовой деятельности через трудовую деятельность. Мастер-класс Роза из гофрированной бумаги
Мастер-класс Роза из гофрированной бумаги ОДИН ИЗ ВИДОВ КОНСТРУИРОВАНИЯ - ОРИГАМИ – КАК СРЕДСТВО РАЗВИТИЯ МЕЛКОЙ МОТОРИКИ
ОДИН ИЗ ВИДОВ КОНСТРУИРОВАНИЯ - ОРИГАМИ – КАК СРЕДСТВО РАЗВИТИЯ МЕЛКОЙ МОТОРИКИ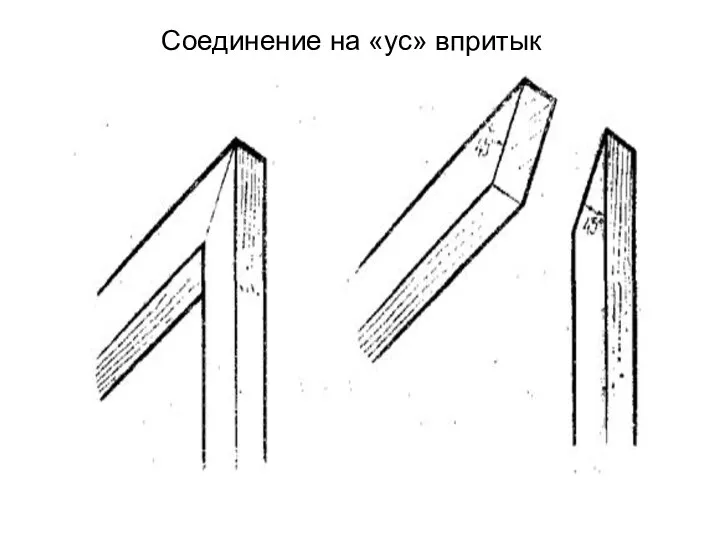 Выполнение соединения УК-2. Правила безопасной работы с зензубелем.
Выполнение соединения УК-2. Правила безопасной работы с зензубелем. презентация к уроку изобразительного искусства Цветущая ветка сакуры
презентация к уроку изобразительного искусства Цветущая ветка сакуры Мода
Мода Технология выполнения ручных швов
Технология выполнения ручных швов Мясо и его обработка
Мясо и его обработка Учимся рисовать Снегурочку.
Учимся рисовать Снегурочку. Пластилинография
Пластилинография Мы любим рисовать, лепить и мастерить.
Мы любим рисовать, лепить и мастерить. Презентация Чугуны: состав, свойства, виды
Презентация Чугуны: состав, свойства, виды Мастер-класс по аппликации Букет для мамы
Мастер-класс по аппликации Букет для мамы Презентация Мои друзья-птицы к уроку изобразительного искусства. 2 класс. Перспективная начальная школа. ФГОС.
Презентация Мои друзья-птицы к уроку изобразительного искусства. 2 класс. Перспективная начальная школа. ФГОС. Презентация к уроку Измерение фигуры человека. Правила снятия мерок.
Презентация к уроку Измерение фигуры человека. Правила снятия мерок.