- هوش مصنوعی

Содержание
- 2. هوش مصنوعي فصل اول مقدمه
- 3. هوش مصنوعي Artificial Intelligence فهرست هوش مصنوعي چيست؟ مباني هوش مصنوعي تاريخچه هوش مصنوعي
- 4. مقدمه هوش مصنوعي چيست؟ مانند انسان فکر کردن مانند انسان عمل کردن عاقلانه عمل کردن عاقلانه
- 5. مقدمه مانند انسان عمل کردن Acting humanly هنر ساخت ماشينهايي که کارهايي را انجام ميدهند که
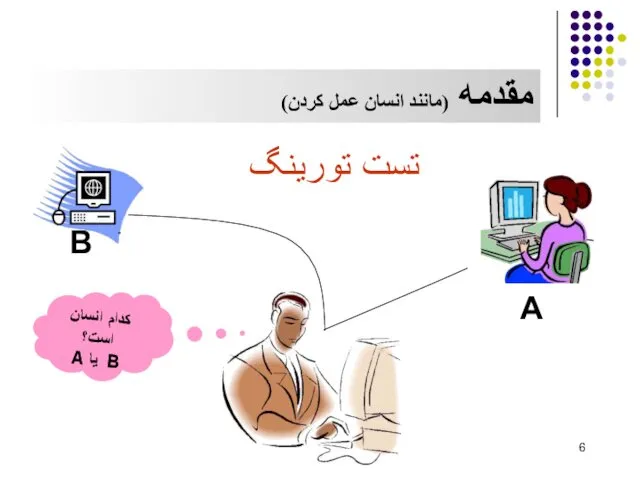
- 6. مقدمه (مانند انسان عمل کردن) تست تورينگ A B کدام انسان است؟ A يا B
- 7. مقدمه مانند انسان فکر کردن Thinking humanly تلاش جديد و هيجان انگيز براي ساخت ماشين هايي
- 8. مقدمه عاقلانه فکر کردن Think rationally مطالعه توانايي هاي ذهني از طريق مدل هاي محاسباتي (منطق
- 9. مقدمه عاقلانه عمل کردن Act rationally طوري عمل کند که بهترين نتيجه را ارائه دهد هوش
- 10. مقدمه مباني هوش مصنوعي فلسفه: منطق، استدلال، ناشي شدن تفکر از مغز فيزيکي، مباني يادگيري، زبان
- 11. مقدمه اقتصاد: نظريه تصميمهاي عقلايي، نظريه بازي علوم عصبي: نحوه پردازش اطلاعات توسط مغز نظريه کنترل
- 12. مقدمه تاريخچه هوش مصنوعي 1943، مک کولوچ و والتر پيتز: ارايه مدل نرون مصنوعي بيتي( دو
- 13. مقدمه (تاريخچه هوش مصنوعي) 1956،نشست کارگروهي دورتموند: انتخاب نام هوش مصنوعي 1959، هربرت جلونتر: برنامه(GTP) را
- 14. مقدمه (تاريخچه هوش مصنوعي) (1973-1966) کند شدن مسير تحقيقات هوش مصنوعی پيچيده شدن الگوريتم برنامه های
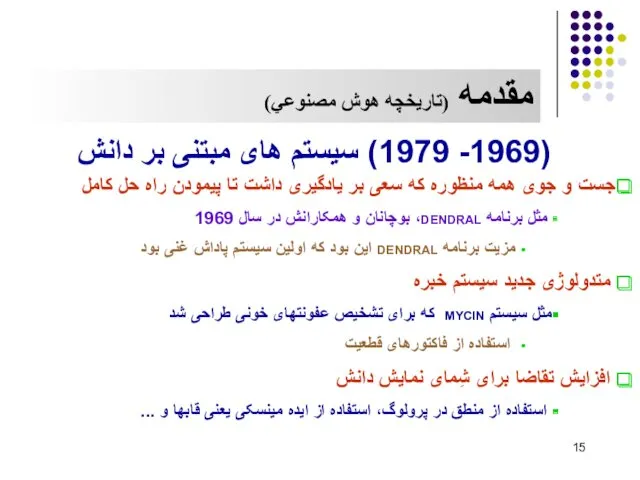
- 15. مقدمه (تاريخچه هوش مصنوعي) (1969- 1979) سيستم های مبتنی بر دانش جست و جوی همه منظوره
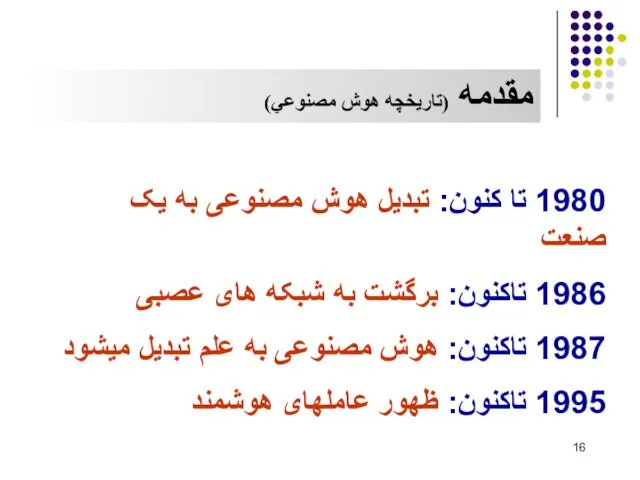
- 16. مقدمه (تاريخچه هوش مصنوعي) 1980 تا کنون: تبديل هوش مصنوعی به يک صنعت 1986 تاکنون: برگشت
- 17. هوش مصنوعي فصل دوم عاملهاي هوشمند
- 18. هوش مصنوعي Artificial Intelligence فهرست عامل خواص محيطهای وظيفه برنامه های عامل
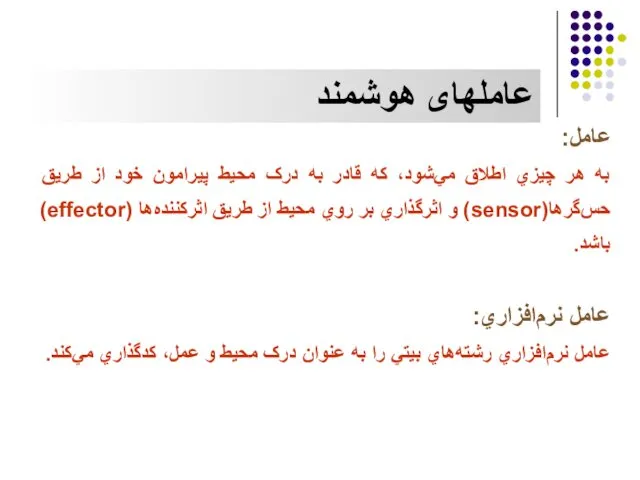
- 19. عامل: به هر چيزي اطلاق ميشود، که قادر به درک محيط پيرامون خود از طريق حسگرها(sensor)
- 20. عوامل انساني حس کردن: گوش، چشم، ديگر ارگانها اثرگذاري: دست، پا، بيني، اندامهاي ديگر عوامل روباتيک
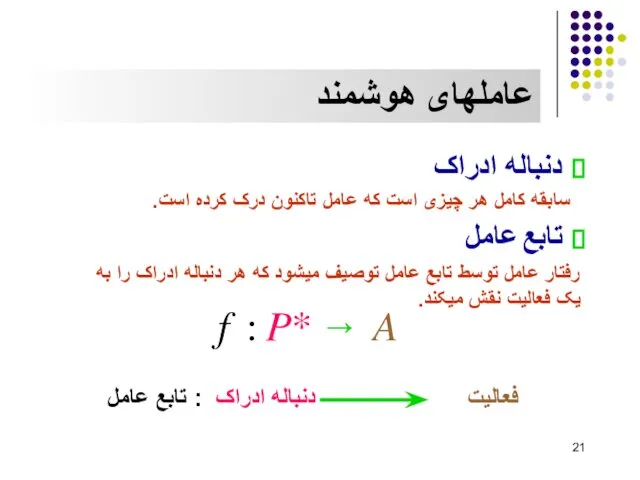
- 21. عاملهای هوشمند تابع عامل رفتار عامل توسط تابع عامل توصيف ميشود که هر دنباله ادراک را
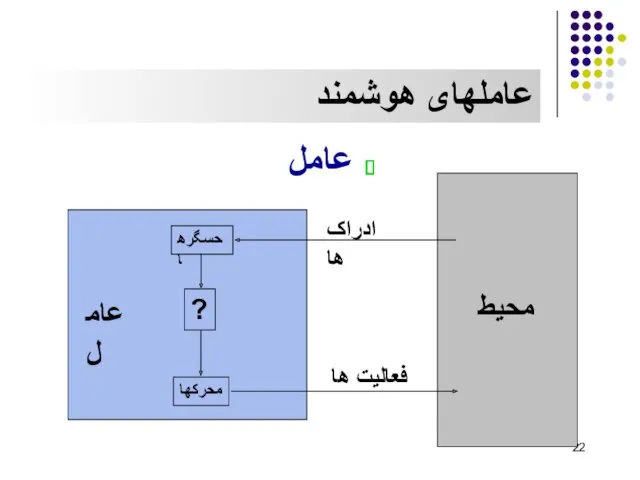
- 22. عاملهای هوشمند عامل حسگرها محرکها ? محيط ادراک ها فعاليت ها عامل
- 23. عاملها چگونه بايد عمل کنند؟ عامل منطقي: چيزي است که کار درست انجام ميدهد. عمل درست:
- 24. آن چه در هر زماني منطقي است به چهار چيز وابسته است: معيار کارايي که درجه
- 25. رفتار عامل وابسته به دنباله ادراکي تا حال است. عامل را بايد بهعنوان ابزاري براي تحليل
- 26. خودمختاري: اگر رفتار عامل هاي تنها مبتني بر دانش دروني باشد و هيچ توجهي به ادراك
- 27. ارتباط بين عامل و محيط: اعمال بوسيله عامل بر محيط انجام ميشود، که خود ادراک عامل
- 28. قابل دسترسي در مقابل غيرقابل دسترسي محيط قابل دسترسي: محيطي که عامل آن توسط ابزار حسکنندهاش
- 29. قطعي در مقابل غير قطعي محيط قطعي: محيطي است که دقيقا بدانيم در وضعيت كنوني دنيا
- 30. اپيزوديک در مقابل غير اپيزوديک درمحيط اپيزوديک (episodic)، تجربه عامل به مرحله هايي تقسيم ميگردد. هر
- 31. ايستا در مقابل پويا محيط پويا: محيطي که در حين سنجيدن عامل تغيير ميکند. محيط نيمهپويا:
- 32. گسسته در مقابل پيوسته محيط گسسته: اگر تعداد محدود و مجزا از ادراک و اعمال بوضوح
- 33. مثالهايي از انواع محيط و ويژگيهاي آنها محيط عاملهای هوشمند
- 34. برنامههاي محيط شبيهساز يک يا چند عامل را به عنوان ورودي گرفته و بگونهاي عمل ميکند
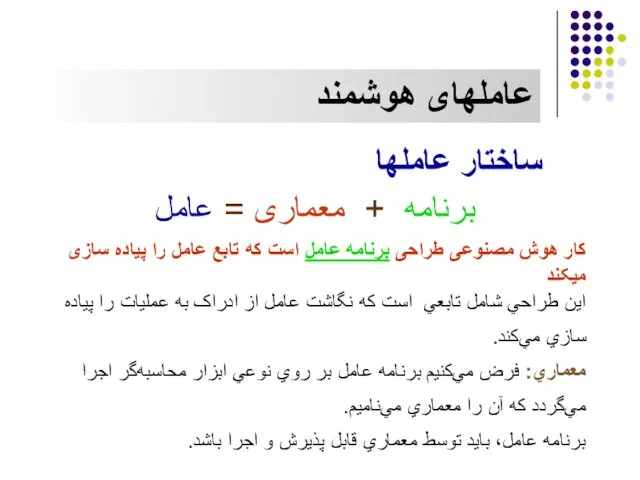
- 35. عاملهای هوشمند ساختار عاملها برنامه + معماری = عامل کار هوش مصنوعی طراحی برنامه عامل است
- 36. عاملهای هوشمند برنامه های عامل عاملهای واکنشی ساده عاملهای هدف گرا عاملهای واکنشی مدل گرا عاملهای
- 37. عاملهای هوشمند عامل عالـِم Omni science)) خروجی واقعی فعاليت خود را ميداند و ميتواند بر اساس
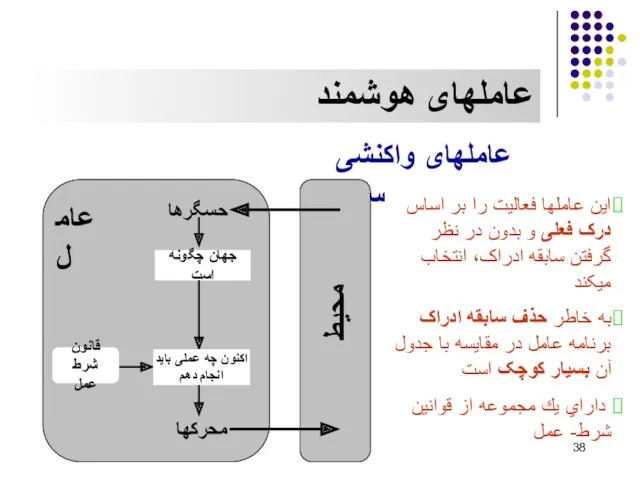
- 38. عاملهای واکنشی ساده عاملهای هوشمند عامل محيط حسگرها جهان چگونه است محرکها قانون شرط عمل اکنون
- 39. عاملهای هوشمند function REFLEX-VACUUM-AGENT ([location, status]) return an action if status == Dirty then return Suck
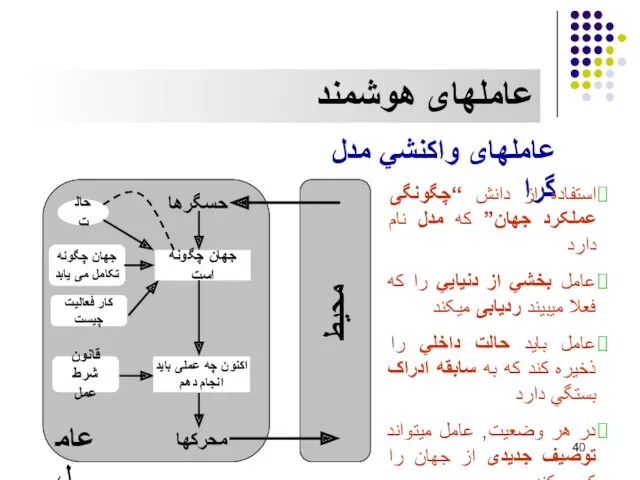
- 40. عاملهای هوشمند عاملهای واکنشي مدل گرا عامل محيط حسگرها جهان چگونه است محرکها قانون شرط عمل
- 41. عاملهای هوشمند عاملهای هدف گرا عامل محيط حسگرها جهان چگونه است محرکها اهداف اکنون چه عملی
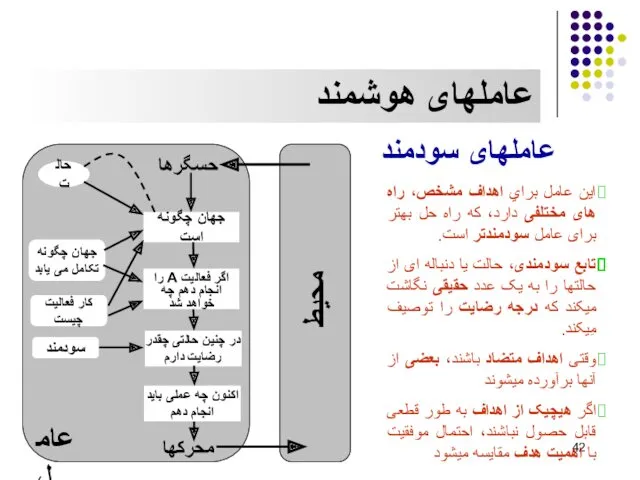
- 42. عاملهای هوشمند عاملهای سودمند عامل محيط حسگرها جهان چگونه است محرکها سودمند اکنون چه عملی بايد
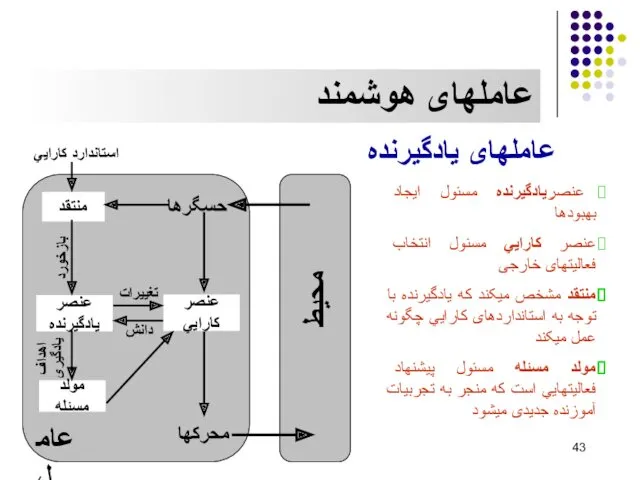
- 43. عاملهای هوشمند عاملهای يادگيرنده عامل حسگرها محرکها عنصرِِيادگيرنده مسئول ايجاد بهبودها عنصر کارايي مسئول انتخاب فعاليتهای
- 44. تفاوت عاملهاي واکنشي و هدفگرا: در طراحي عاملهاي واکنشي طراح براي حالات متفاوت عملي درست را
- 45. براي عامل واکنشي ما مجبور به دوباره نويسي تعداد زيادي قوانين شرط –عمل خواهيم بود. عامل
- 46. هوش مصنوعي فصل سوم حل مسئله با جستجو
- 47. هوش مصنوعي Artificial Intelligence فهرست عاملهای حل مسئله مسئله اندازه گيری کارايي حل مسئله جستجوی ناآگاهانه
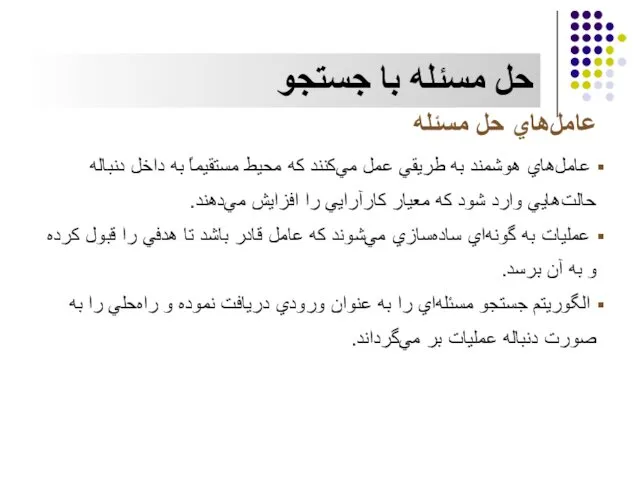
- 48. يک نوع عامل هدفگرا، عامل حل مسئله ناميده ميشود. عاملهاي حل مسئله توسط يافتن ترتيب عمليات
- 49. عاملهاي حل مسئله عاملهاي هوشمند به طريقي عمل ميکنند که محيط مستقيماً به داخل دنباله حالتهايي
- 50. فاز اجرايي: مرحلهاي است که در آن زمان، راهحلي پيدا ميشود و عمليات پيشنهادي ميتوانند انجام
- 51. حل مسئله با جستجو عاملهای حل مسئله چهار گام اساسي برای حل مسائل فرموله کردن هدف:
- 52. پس از فرمولهسازي يک هدف و يک مسئله براي حل عامل، رويه جستجويي را براي حل
- 53. چهار نوع اساسي از مسائل وجود دارند: مسائل تک حالته (Single-state) مسائل چند حالته (Multiple-state) مسائل
- 54. مسائل و راهحلهاي خوب تعريف شده مسئله: در واقع مجموعهاي از اطلاعات است که عامل از
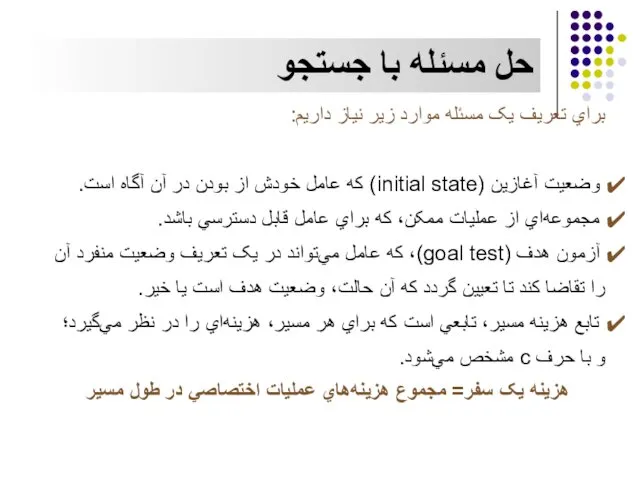
- 55. براي تعريف يک مسئله موارد زير نياز داريم: وضعيت آغازين (initial state) که عامل خودش از
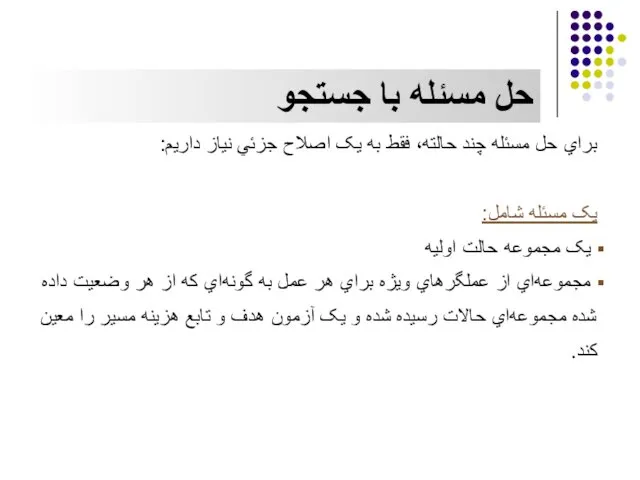
- 56. براي حل مسئله چند حالته، فقط به يک اصلاح جزئي نياز داريم: يک مسئله شامل: يک
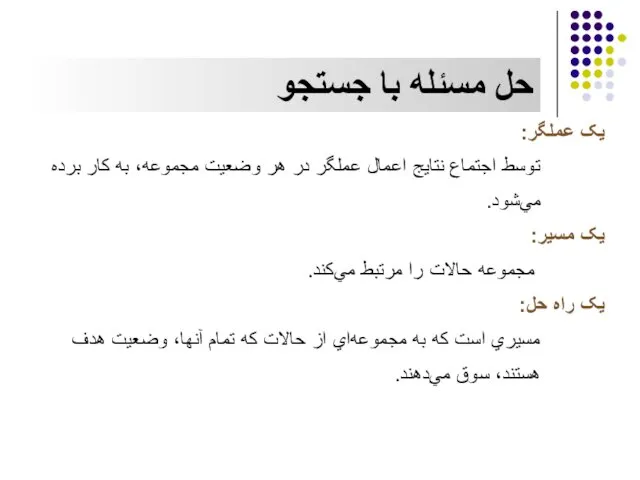
- 57. يک عملگر: توسط اجتماع نتايج اعمال عملگر در هر وضعيت مجموعه، به کار برده ميشود. يک
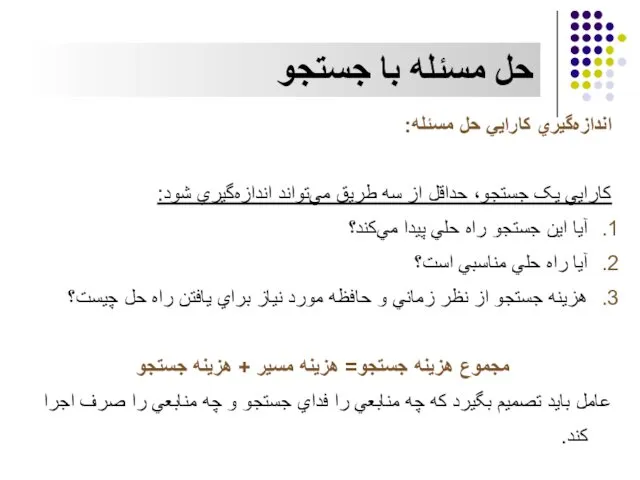
- 58. اندازهگيري کارايي حل مسئله: کارايي يک جستجو، حداقل از سه طريق ميتواند اندازهگيري شود: آيا اين
- 59. انتخاب حالات و عمليات هنر واقعي حل مسئله، تصميمگيري در مورد اين است که چه چيزهايي
- 60. انتزاع: فرآيند حذف جزئيات از يک بارنمايي انتزاع (abstraction) ناميده ميشود. همانگونه که تعريف را خلاصه
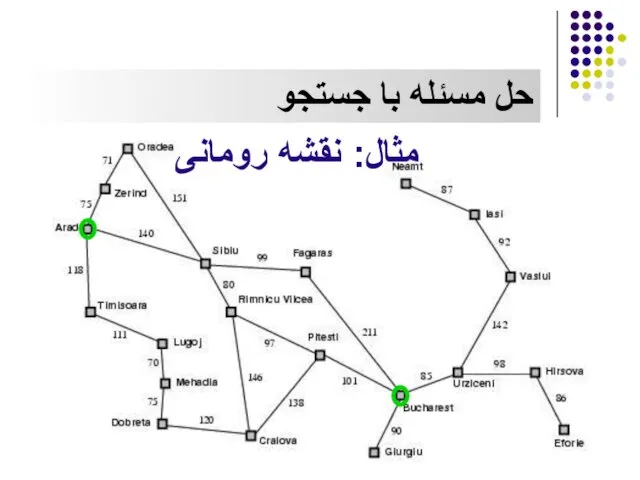
- 61. حل مسئله با جستجو مثال: نقشه رومانی
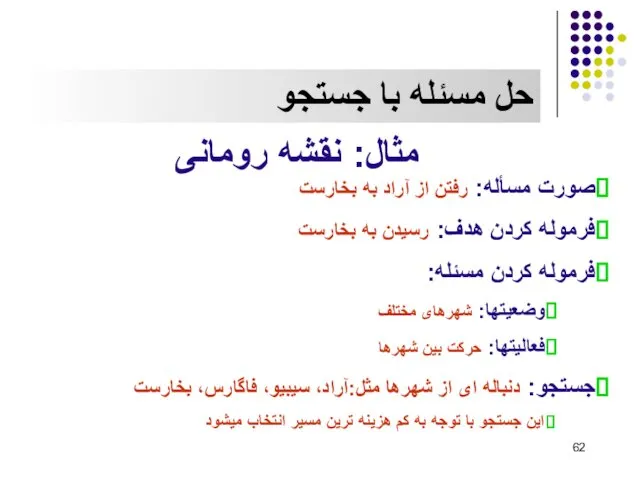
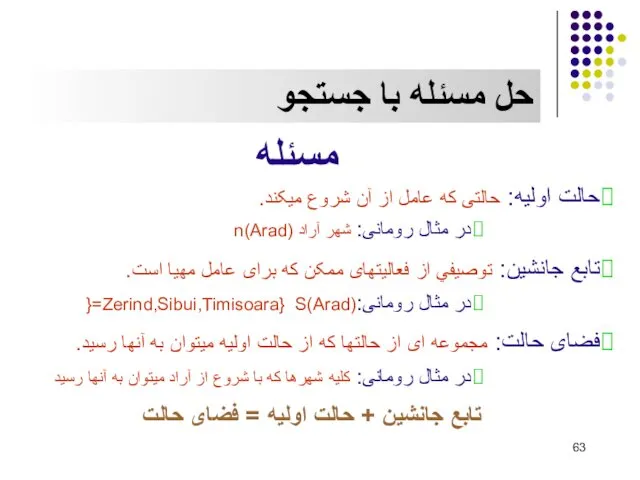
- 62. حل مسئله با جستجو صورت مسأله: رفتن از آراد به بخارست فرموله کردن هدف: رسيدن به
- 63. حل مسئله با جستجو مسئله حالت اوليه: حالتی که عامل از آن شروع ميکند. در مثال
- 64. حل مسئله با جستجو آزمون هدف: تعيين ميکند که آيا حالت خاصی، حالت هدف است يا
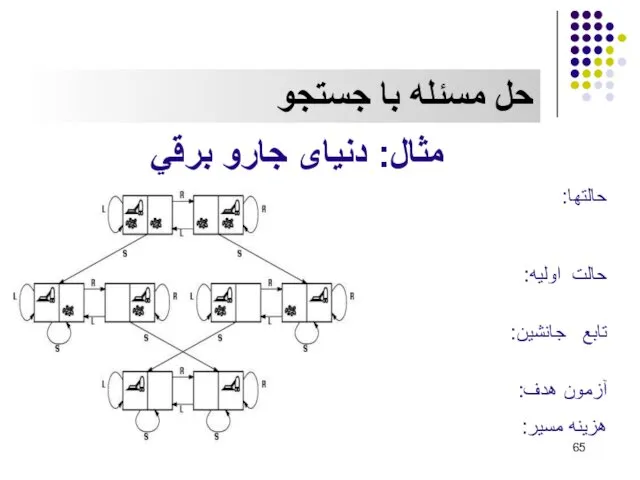
- 65. حل مسئله با جستجو مثال: دنيای جارو برقي حالتها: دو مکان که هر يک ممکن است
- 66. حل مسئله با جستجو مثال: دنيای جارو برقي حالتها: دو مکان که هر يک ممکن است
- 67. حل مسئله با جستجو مثال: معمای8 معماي 8: معماي 8 نمونهاي است شامل يک صفحة 3*3
- 68. حل مسئله با جستجو مثال: معمای8 حالتها: توصيف وضعيت مکان هر 8 مربع را در يکي
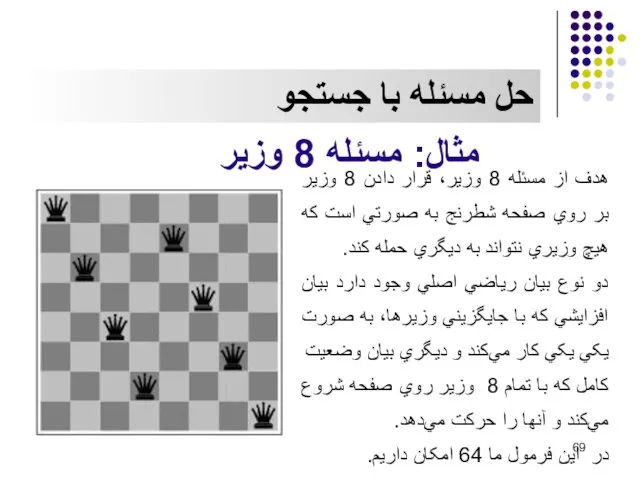
- 69. حل مسئله با جستجو مثال: مسئله 8 وزير هدف از مسئله 8 وزير، قرار دادن 8
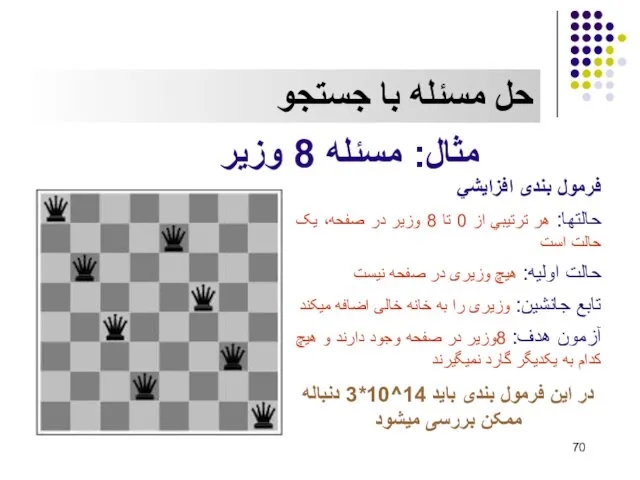
- 70. حل مسئله با جستجو مثال: مسئله 8 وزير فرمول بندی افزايشي حالتها: هر ترتيبي از 0
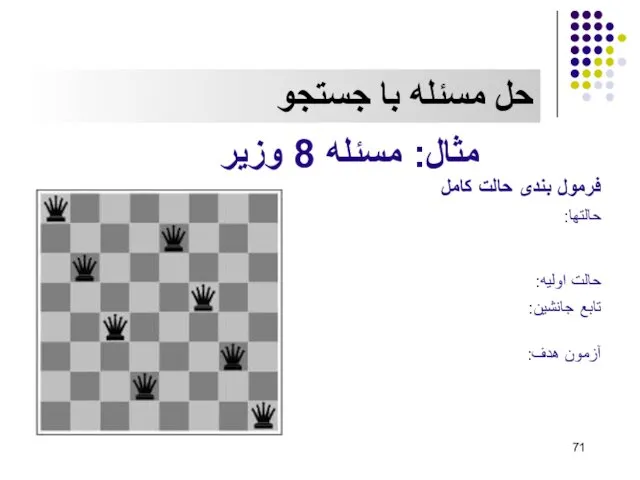
- 71. حل مسئله با جستجو مثال: مسئله 8 وزير فرمول بندی حالت کامل حالتها: چيدمان n وزير
- 72. حل مسئله با جستجو مثال: مسئله 8 وزير فرمول بندی حالت کامل حالتها: چيدمان n وزير
- 73. مسيريابي: الگوريتمهاي مسير يابي کاربردهاي زيادي دراند، مانند مسيريابي در شبکههاي کامپيوتري، سيستمهاي خودکار مسافرتي و
- 74. مسائل فروشنده دوره گرد و تور : مسئله فروشنده دوره گرد مسئله مشهوري است که در
- 75. حل مسئله با جستجو اندازه گيری کارايي حل مسئله کامل بودن: آيا الگوريتم تضمين ميکند که
- 76. حل مسئله با جستجو اندازه گيری کارايي حل مسئله کامل بودن: آيا الگوريتم تضمين ميکند که
- 77. حل مسئله با جستجو جستجوی ناآگاهانه ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از تعريف
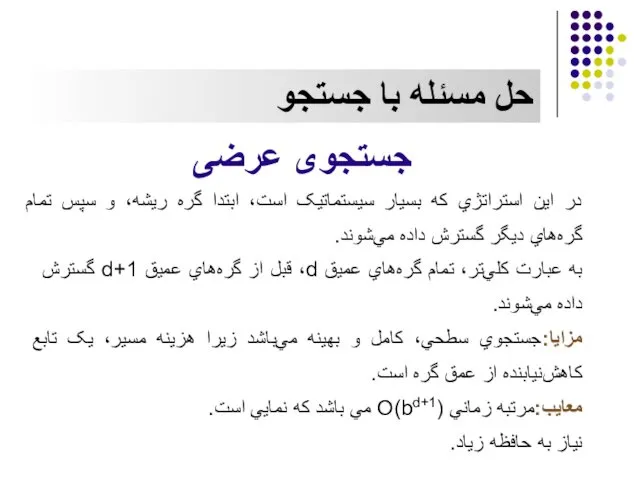
- 78. در اين استراتژي که بسيار سيستماتيک است، ابتدا گره ريشه، و سپس تمام گرههاي ديگر گسترش
- 79. حل مسئله با جستجو جستجوی عرضی
- 80. حل مسئله با جستجو جستجوی عرضی کامل بودن: بله بهينگی: بله (مشروط) در صورتی بهينه است
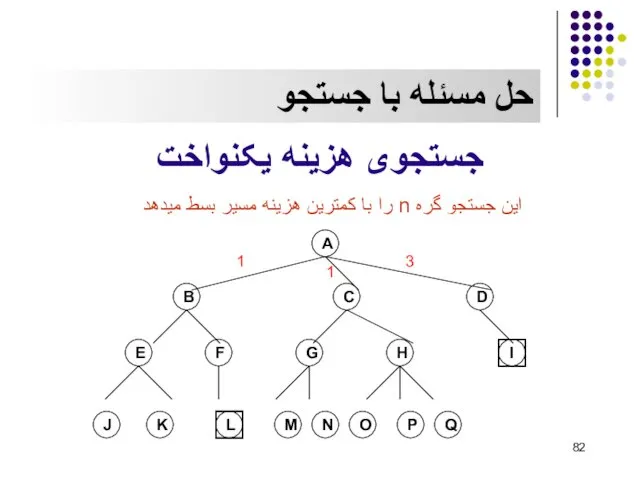
- 81. حل مسئله با جستجو جستجوی هزينه يکنواخت در اين روش گره اي بسط داده مي شود
- 82. حل مسئله با جستجو جستجوی هزينه يکنواخت اين جستجو گره n را با کمترين هزينه مسير
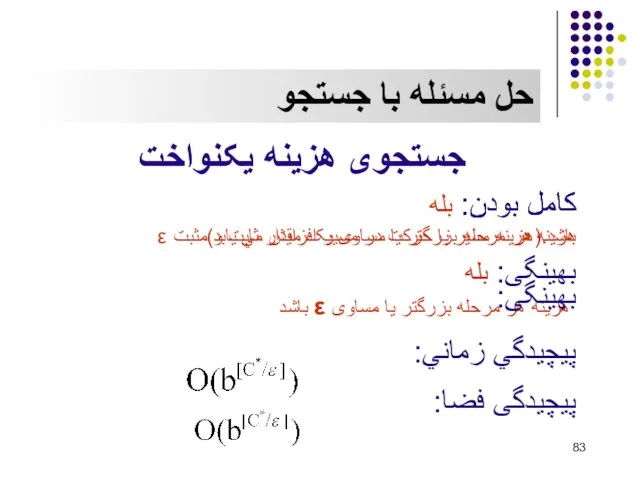
- 83. حل مسئله با جستجو کامل بودن: بله هزينه هر مرحله بزرگتر يا مساوی يک مقدار ثابت
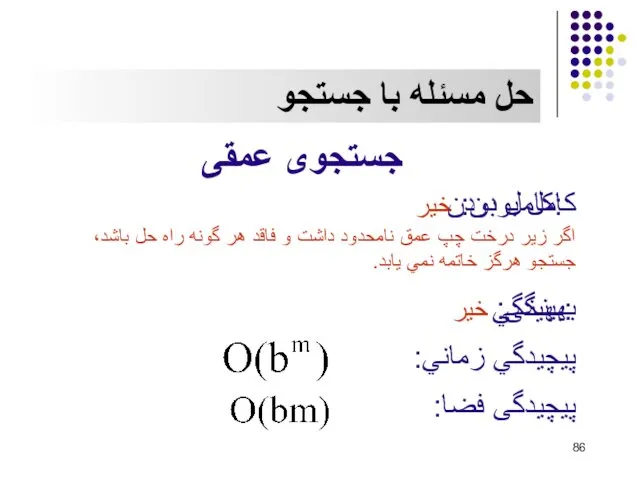
- 84. اين استراتژي، يکي از گرهها را در پائينترين سطح درخت بسط ميدهد؛ اما اگر به نتيجه
- 85. حل مسئله با جستجو جستجوی عمقی 2 3 4 5 6 7
- 86. حل مسئله با جستجو کامل بودن: خير اگر زير درخت چپ عمق نامحدود داشت و فاقد
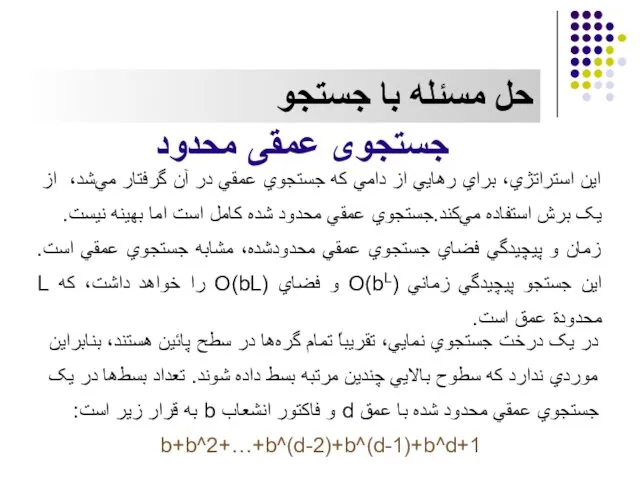
- 87. حل مسئله با جستجو جستجوی عمقی محدود اين استراتژي، براي رهايي از دامي که جستجوي عمقي
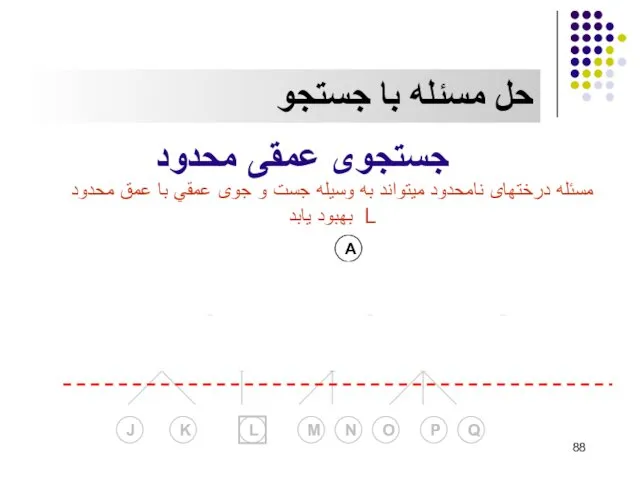
- 88. حل مسئله با جستجو جستجوی عمقی محدود مسئله درختهای نامحدود ميتواند به وسيله جست و جوی
- 89. حل مسئله با جستجو جستجوی عمقی محدود کامل بودن: خير اگر L بهينگی: خير اگر L
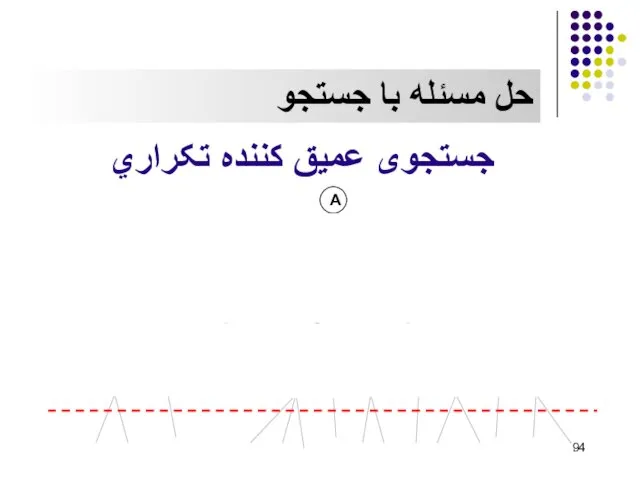
- 90. حل مسئله با جستجو جستجوی عميق کننده تکراري قسمت دشوار جستجوي عمقي محدود شده، انتخاب يک
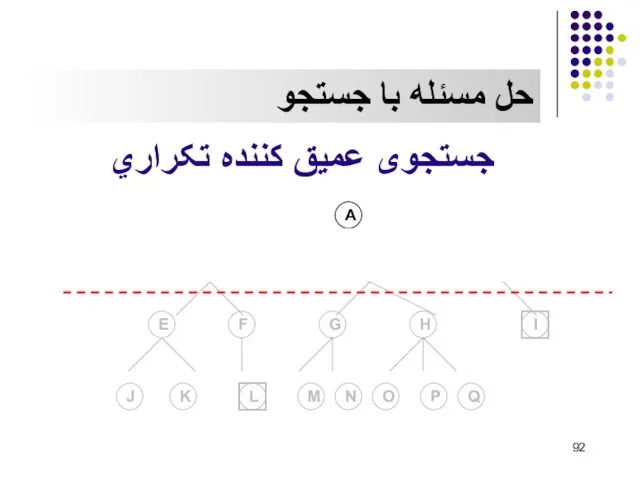
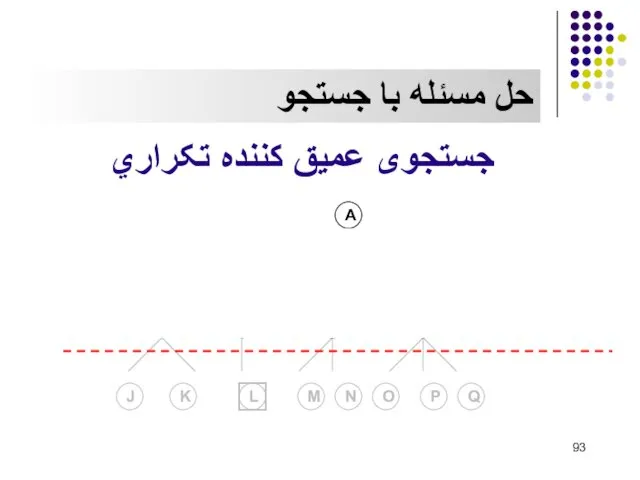
- 91. حل مسئله با جستجو در جستجوي عميقکننده تکراري، گرههاي سطوح پائيني يک بار بسط داده ميشوند،
- 92. حل مسئله با جستجو جستجوی عميق کننده تکراري
- 93. حل مسئله با جستجو جستجوی عميق کننده تکراري
- 94. حل مسئله با جستجو جستجوی عميق کننده تکراري A B C D E F G H
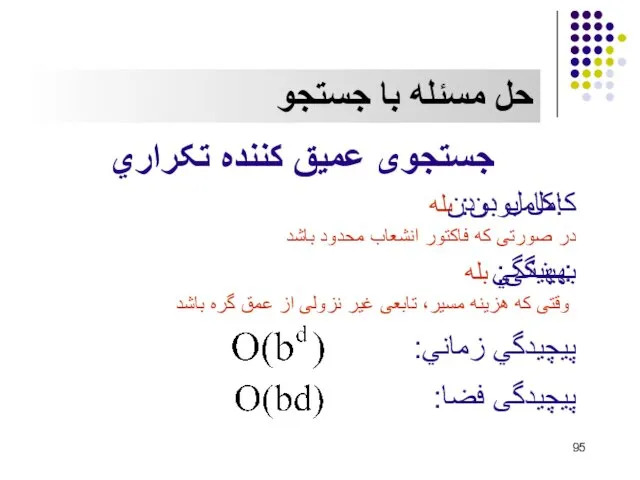
- 95. حل مسئله با جستجو جستجوی عميق کننده تکراري کامل بودن: بله در صورتی که فاکتور انشعاب
- 96. حل مسئله با جستجو نكته : پيچيدگي زماني اين جستجو هنوز O(bd/2) است، اگر آزمون اشتراك
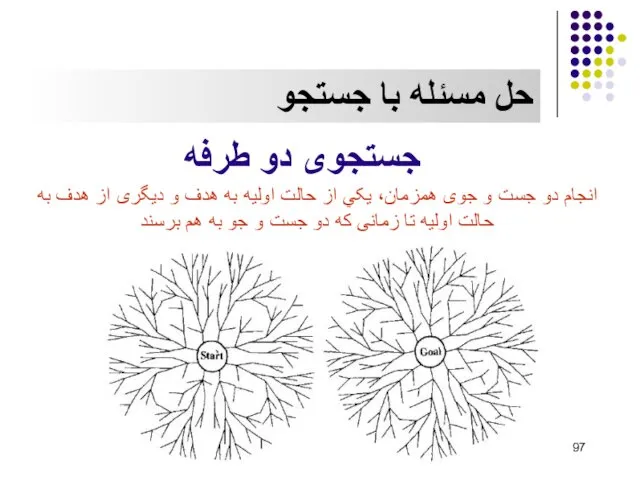
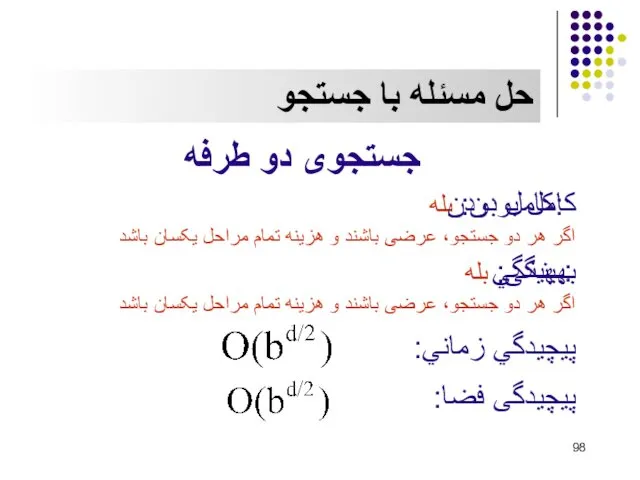
- 97. حل مسئله با جستجو جستجوی دو طرفه انجام دو جست و جوی همزمان، يکي از حالت
- 98. حل مسئله با جستجو جستجوی دو طرفه کامل بودن: بله اگر هر دو جستجو، عرضی باشند
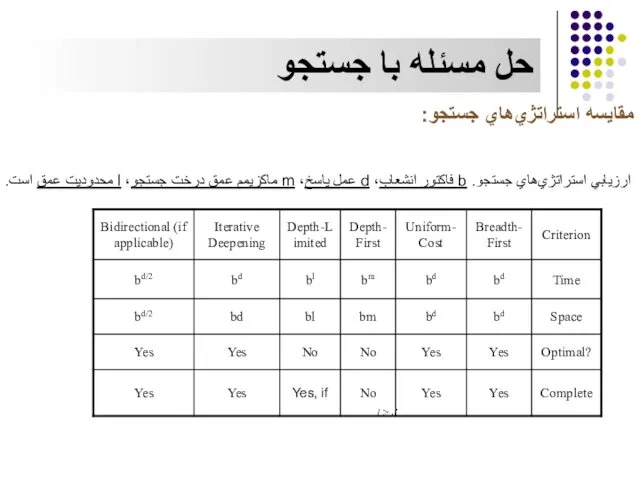
- 99. مقايسه استراتژيهاي جستجو: ارزيابي استراتژيهاي جستجو. b فاکتور انشعاب، d عمل پاسخ، m ماکزيمم عمق درخت
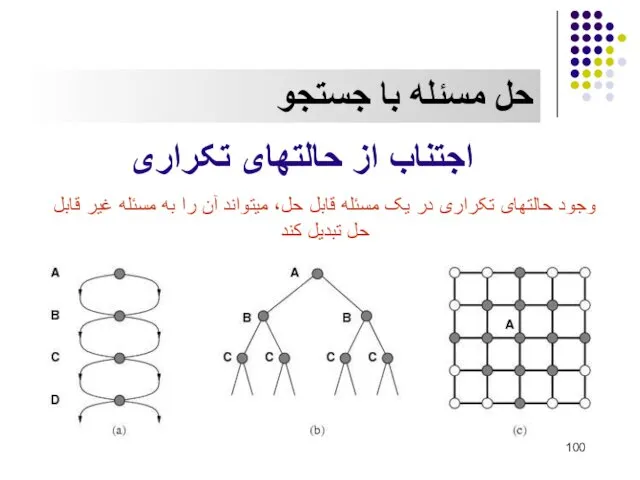
- 100. حل مسئله با جستجو اجتناب از حالتهای تکراری وجود حالتهای تکراری در يک مسئله قابل حل،
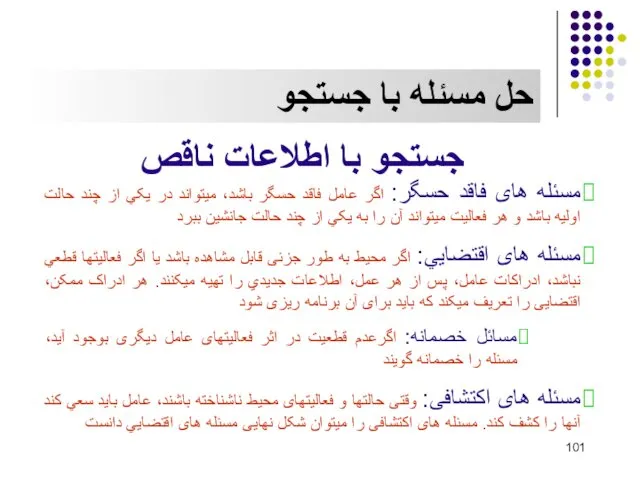
- 101. حل مسئله با جستجو جستجو با اطلاعات ناقص مسئله های فاقد حسگر: اگر عامل فاقد حسگر
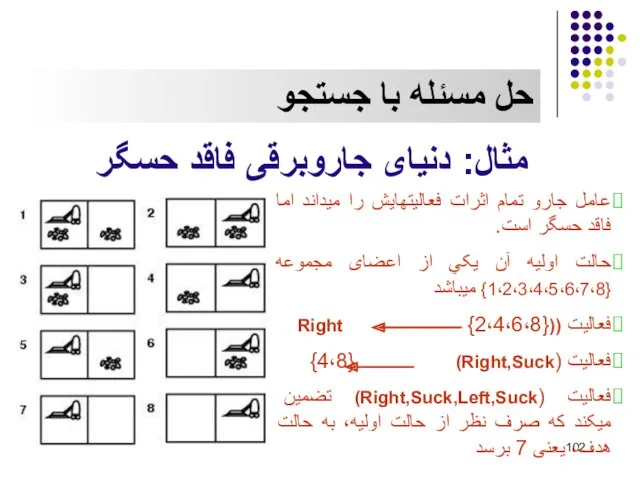
- 102. حل مسئله با جستجو مثال: دنيای جاروبرقی فاقد حسگر عامل جارو تمام اثرات فعاليتهايش را ميداند
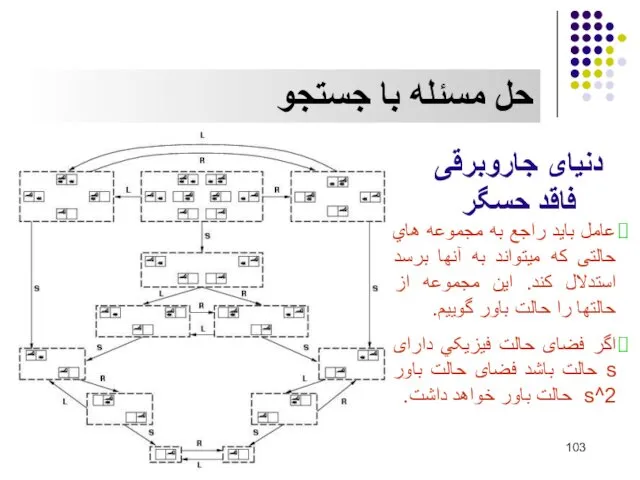
- 103. حل مسئله با جستجو دنيای جاروبرقی فاقد حسگر عامل بايد راجع به مجموعه هاي حالتی که
- 104. هوش مصنوعي فصل چهارم جست و جوی آگاهانه و اکتشاف
- 105. هوش مصنوعي Artificial Intelligence فهرست متدهای جست و جوی آگاهانه يادگيری برای جست و جوی بهتر
- 106. جست و جوی آگاهانه و اکتشاف متدهای جستجوی آگاهانه بهترين جستجو حريصانه A* IDA* RBFS MA*
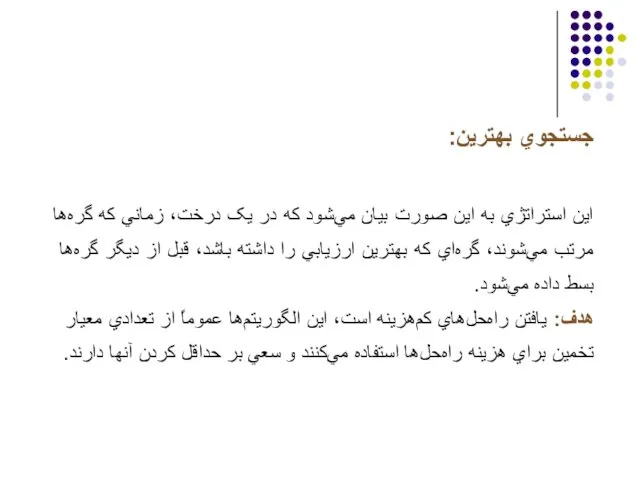
- 107. جستجوي بهترين: اين استراتژي به اين صورت بيان ميشود که در يک درخت، زماني که گرهها
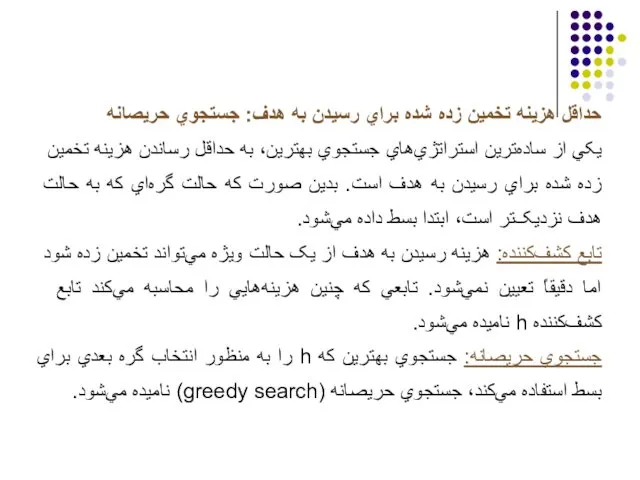
- 108. حداقل هزينه تخمين زده شده براي رسيدن به هدف: جستجوي حريصانه يکي از سادهترين استراتژيهاي جستجوي
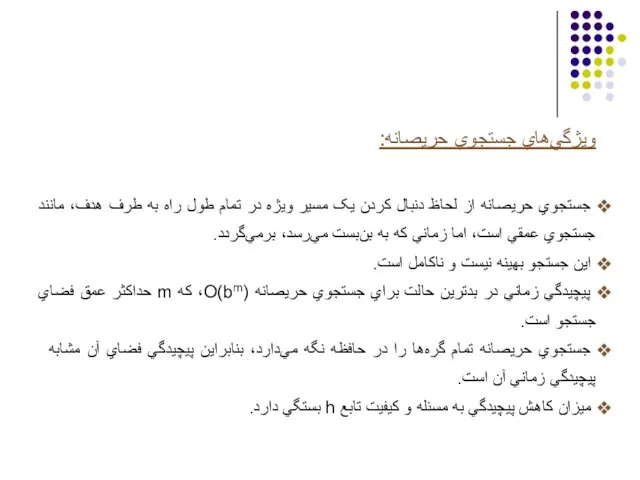
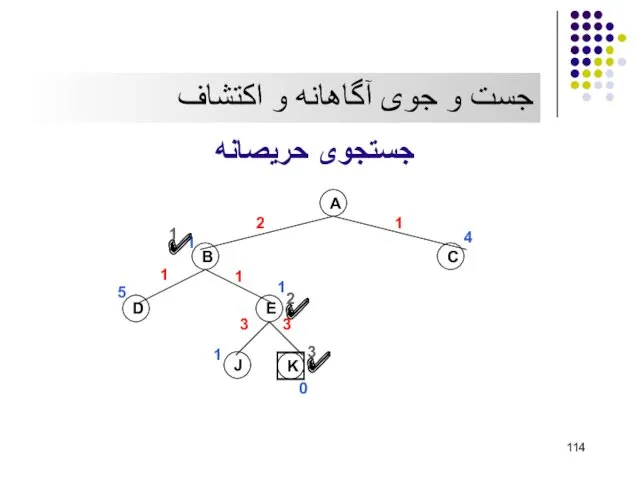
- 109. ويژگيهاي جستجوي حريصانه: جستجوي حريصانه از لحاظ دنبال کردن يک مسير ويژه در تمام طول راه
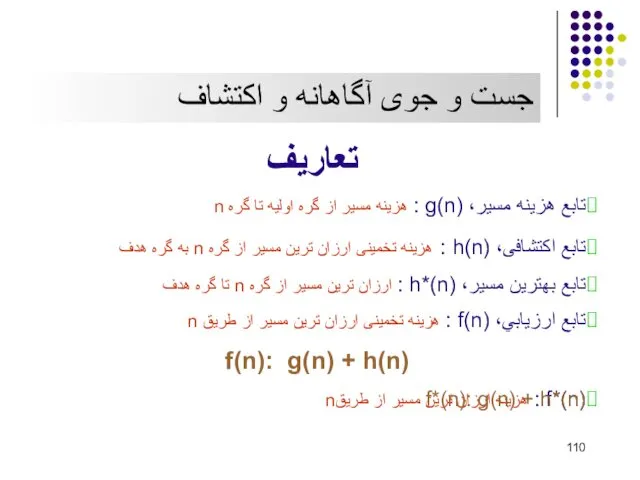
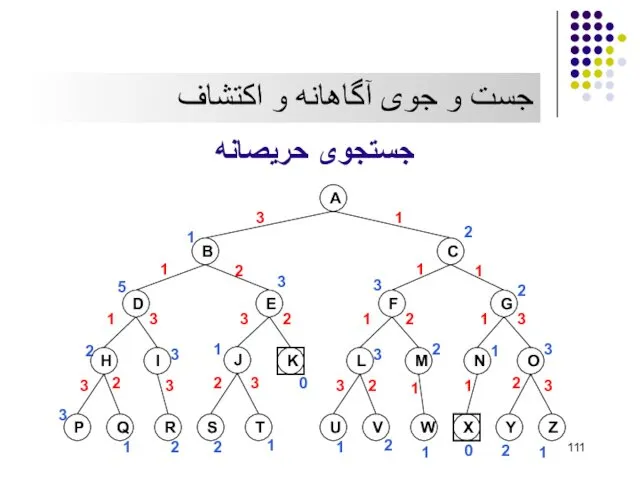
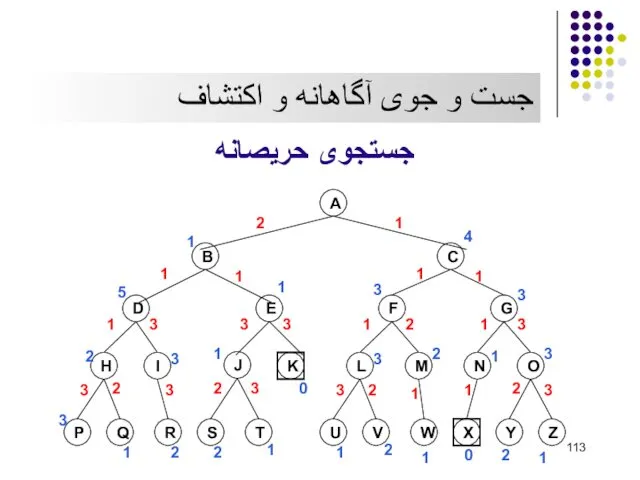
- 110. جست و جوی آگاهانه و اکتشاف تعاريف تابع هزينه مسير، g(n) : هزينه مسير از گره
- 111. جست و جوی آگاهانه و اکتشاف A B C D E F G H I K
- 112. جست و جوی آگاهانه و اکتشاف A B C D E F G N O 3
- 113. جست و جوی آگاهانه و اکتشاف جستجوی حريصانه A F G H I M L N
- 114. جست و جوی آگاهانه و اکتشاف جستجوی حريصانه A
- 115. جست و جوی آگاهانه و اکتشاف جستجوی حريصانه کامل بودن: خير اما اگر h = h*
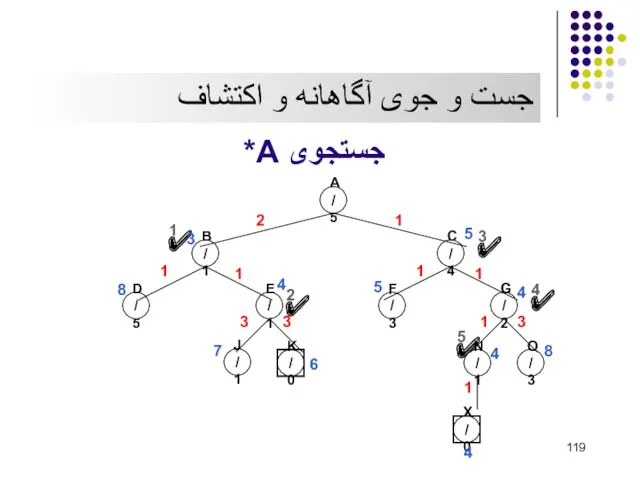
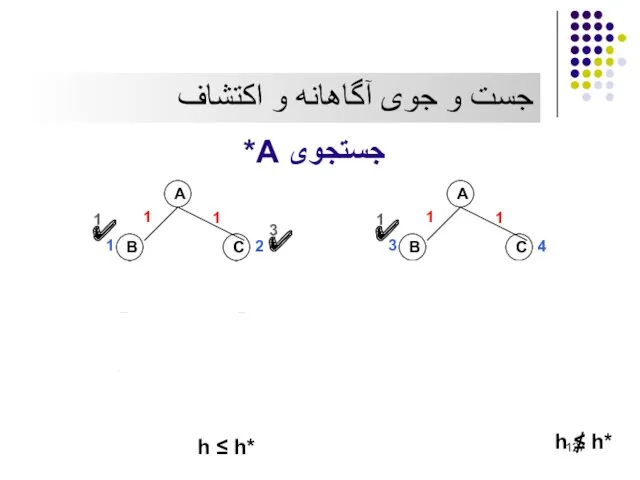
- 116. جست و جوی آگاهانه و اکتشاف جستجوی A* A/5 B/4 C/4 D/5 E/1 F/3 G/2 H/2
- 117. جست و جوی آگاهانه و اکتشاف جستجوی A* A/5
- 118. جست و جوی آگاهانه و اکتشاف جستجوی A* A/5 B/1 C/4 D/5 E/1 F/3 G/2 H/2
- 119. جستجوی A* جست و جوی آگاهانه و اکتشاف A/5
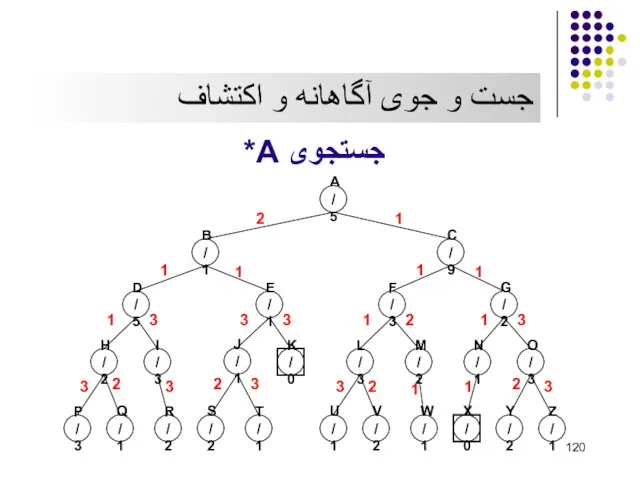
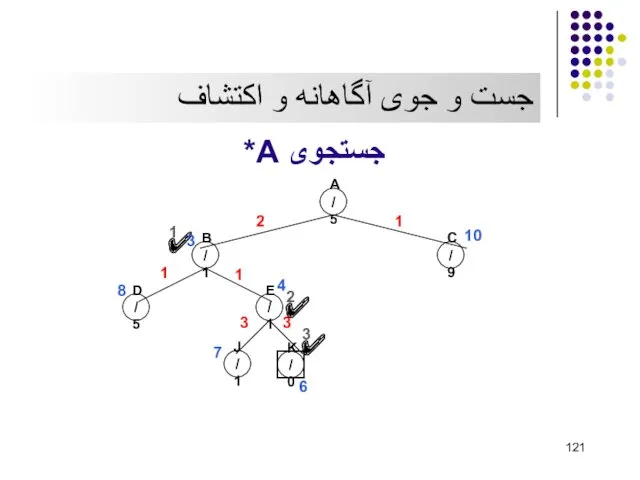
- 120. جستجوی A* جست و جوی آگاهانه و اکتشاف A/5 B/1 C/9 D/5 E/1 F/3 G/2 H/2
- 121. جستجوی A* جست و جوی آگاهانه و اکتشاف A/5
- 122. جستجوی A* جست و جوی آگاهانه و اکتشاف کامل بودن: بله بهينگی: بله پيچيدگي زماني: پيچيدگی
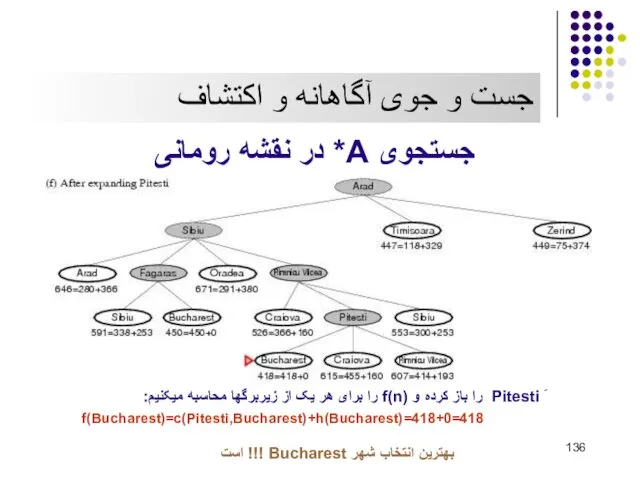
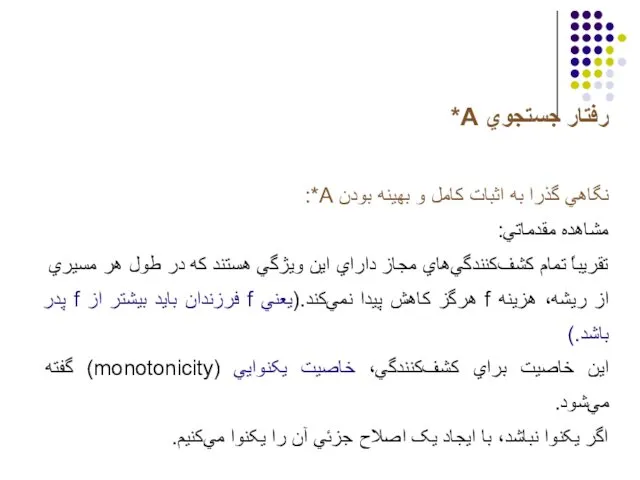
- 123. رفتار جستجوي A* نگاهي گذرا به اثبات کامل و بهينه بودن A*: مشاهده مقدماتي: تقريباً تمام
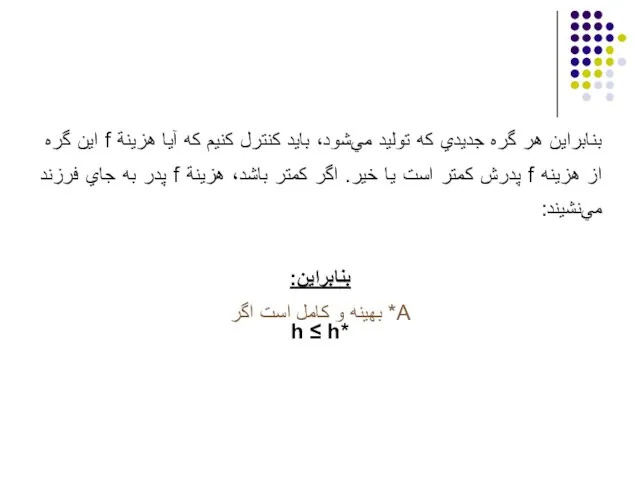
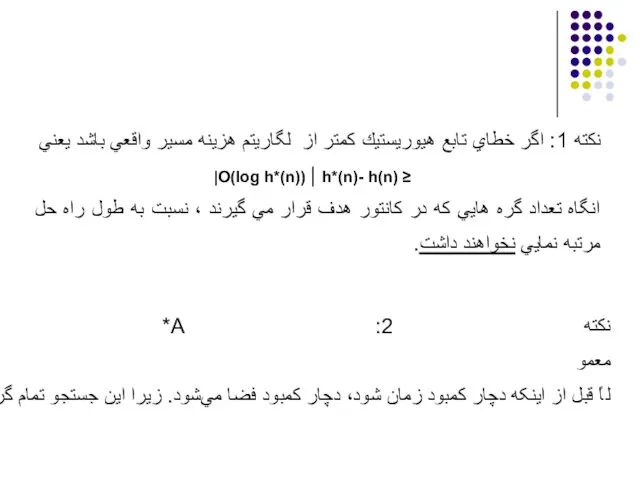
- 124. بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة f اين گره
- 125. h*(n) : هزينه واقعي رسيدن از n به هدف است. در استفاده عملي، خطاها با هزينه
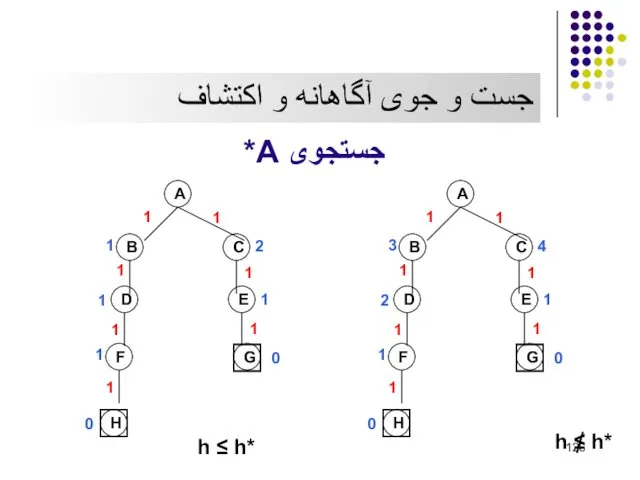
- 126. جست و جوی آگاهانه و اکتشاف h ≤ h* h ≤ h* / جستجوی A*
- 127. جست و جوی آگاهانه و اکتشاف جستجوی A* h ≤ h* h ≤ h* /
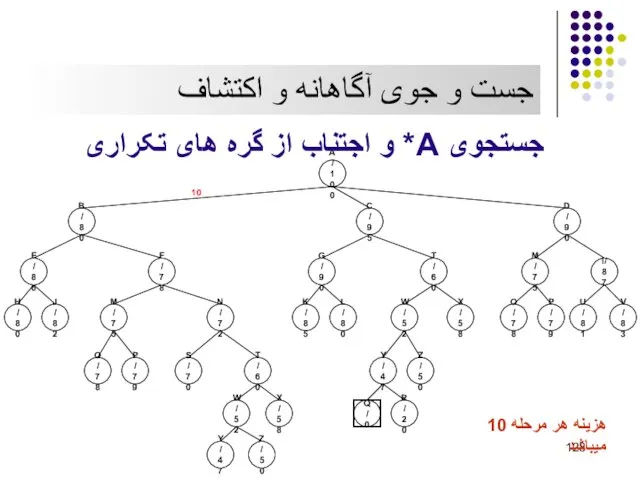
- 128. جست و جوی آگاهانه و اکتشاف A/100 B/80 C/95 E/86 F/78 G/90 T/60 H/80 J/82 N/72
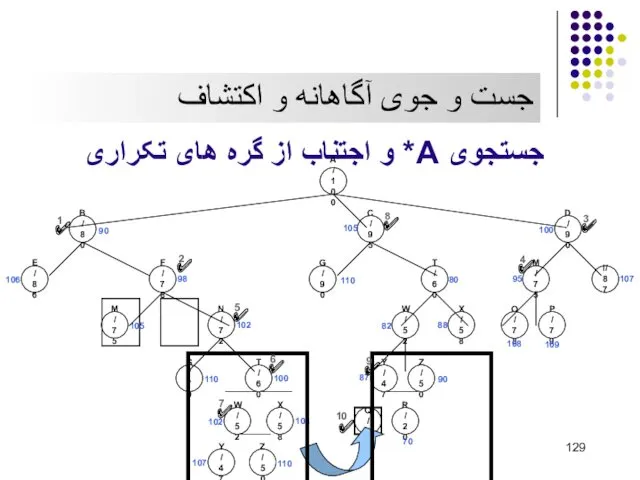
- 129. جست و جوی آگاهانه و اکتشاف جستجوی A* و اجتناب از گره های تکراری A/100 ?
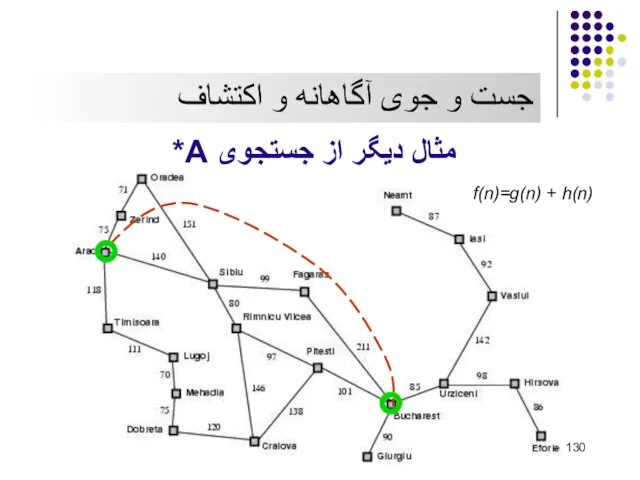
- 130. جست و جوی آگاهانه و اکتشاف مثال ديگر از جستجوی A* f(n)=g(n) + h(n)
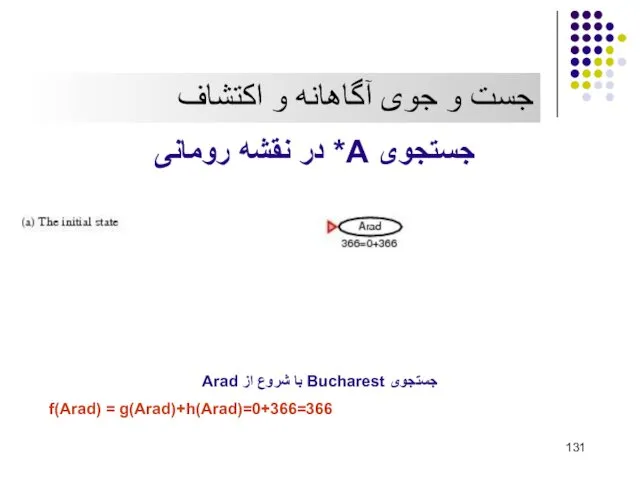
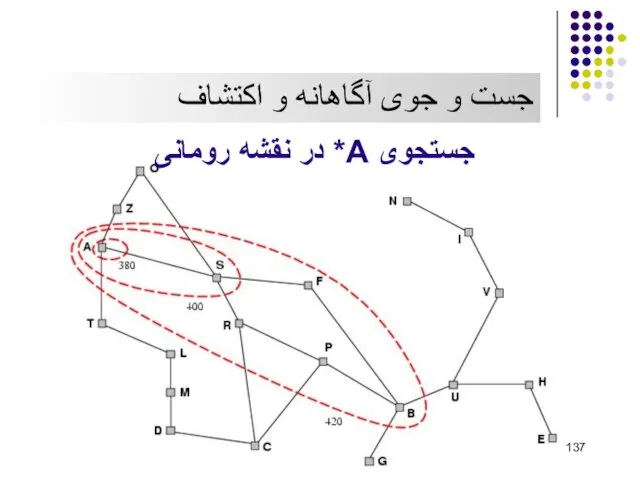
- 131. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی جستجوی Bucharest با شروع از
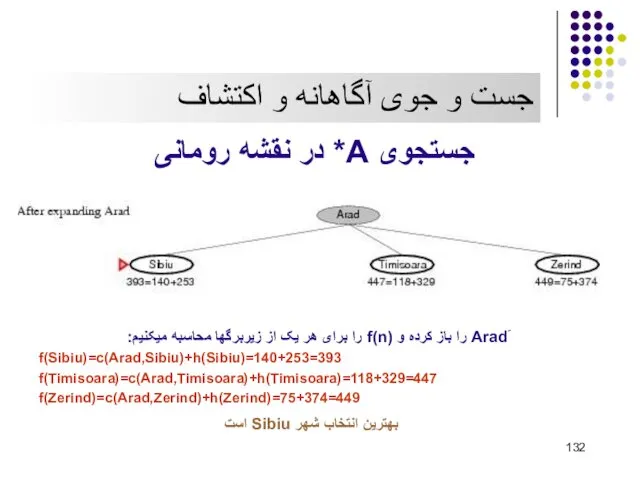
- 132. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی ََArad را باز کرده و
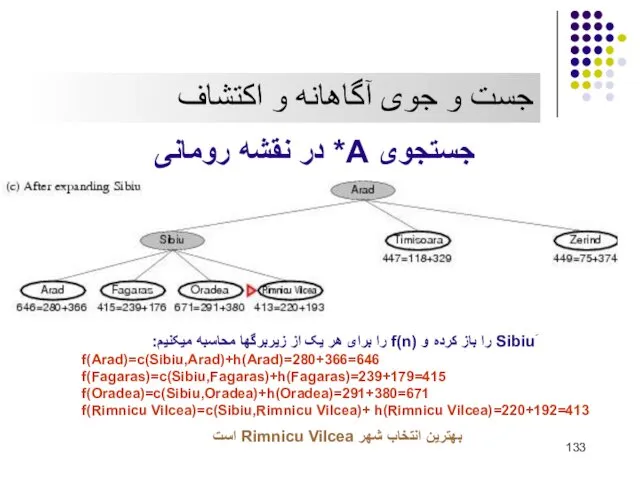
- 133. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی ََSibiu را باز کرده و
- 134. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی ََRimnicu Vilcea را باز کرده
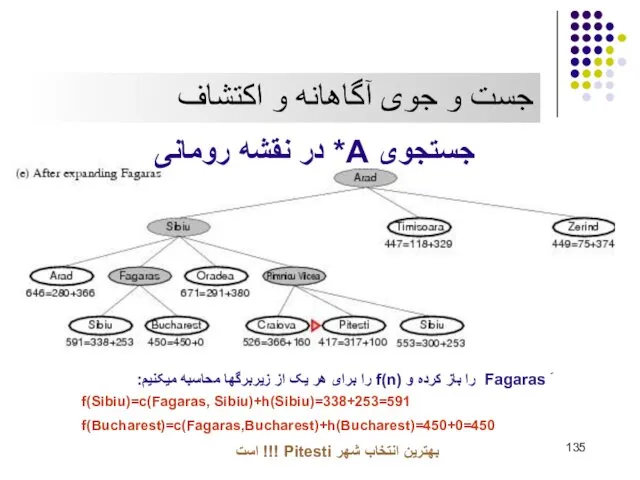
- 135. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی ََ Fagaras را باز کرده
- 136. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی ََ Pitesti را باز کرده
- 137. جست و جوی آگاهانه و اکتشاف جستجوی A* در نقشه رومانی
- 138. رفتار جستجوي A* نگاهي گذرا به اثبات کامل و بهينه بودن A*: مشاهده مقدماتي: تقريباً تمام
- 139. بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة f اين گره
- 140. نكته 2: A* معمولاً قبل از اينکه دچار کمبود زمان شود، دچار کمبود فضا ميشود. زيرا
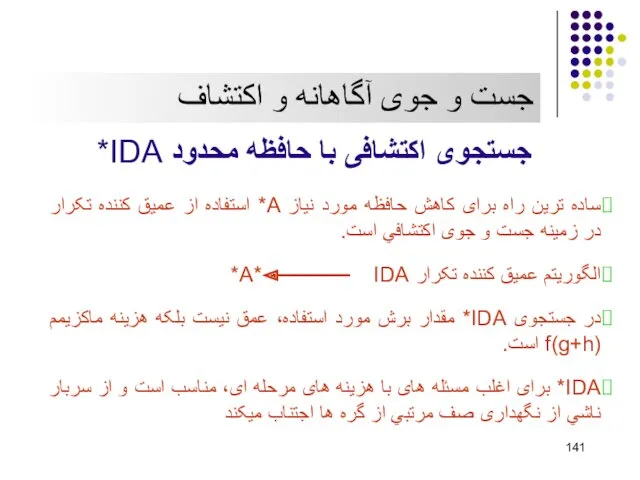
- 141. جست و جوی آگاهانه و اکتشاف جستجوی اکتشافی با حافظه محدود IDA* ساده ترين راه برای
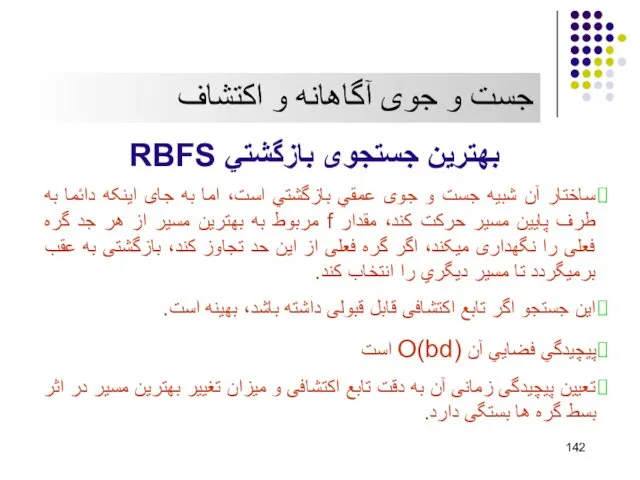
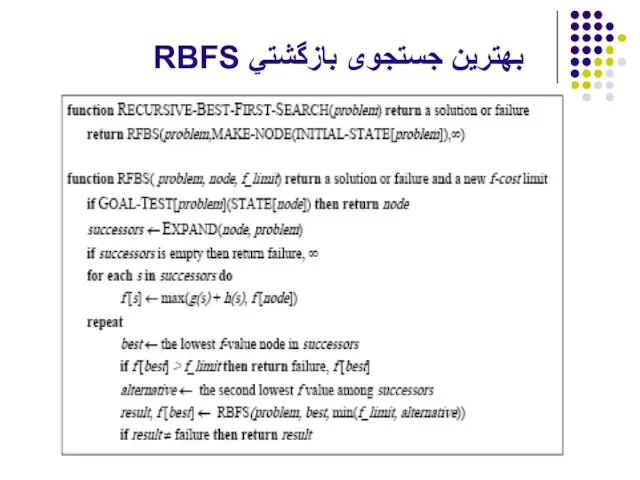
- 142. بهترين جستجوی بازگشتي RBFS جست و جوی آگاهانه و اکتشاف ساختار آن شبيه جست و جوی
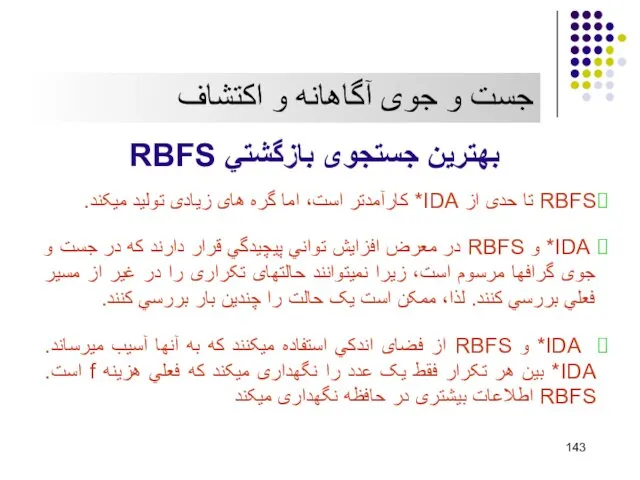
- 143. جست و جوی آگاهانه و اکتشاف بهترين جستجوی بازگشتي RBFS RBFS تا حدی از IDA* کارآمدتر
- 144. بهترين جستجوی بازگشتي RBFS
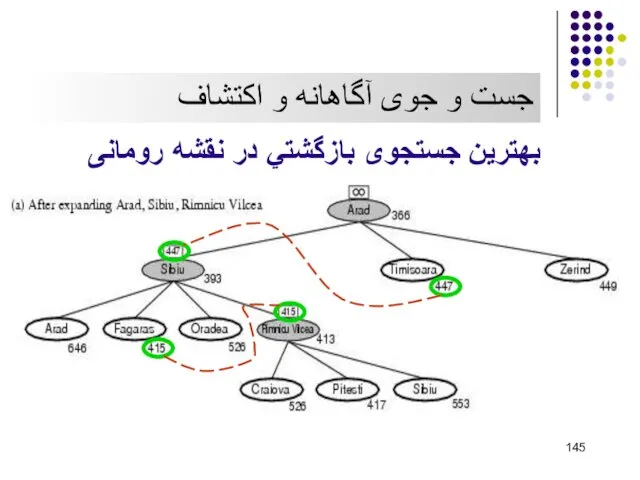
- 145. جست و جوی آگاهانه و اکتشاف بهترين جستجوی بازگشتي در نقشه رومانی
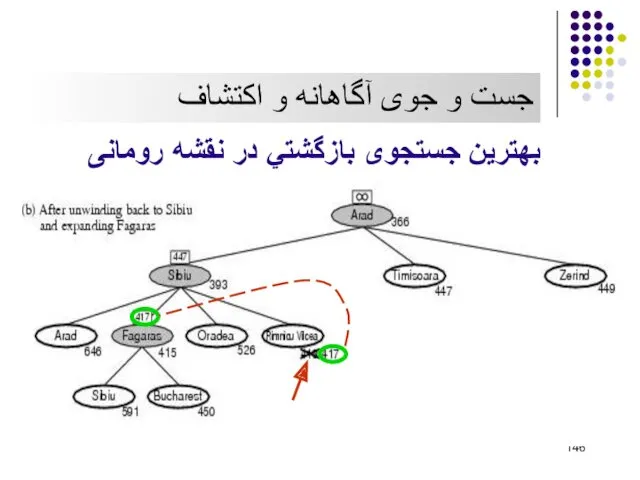
- 146. جست و جوی آگاهانه و اکتشاف بهترين جستجوی بازگشتي در نقشه رومانی
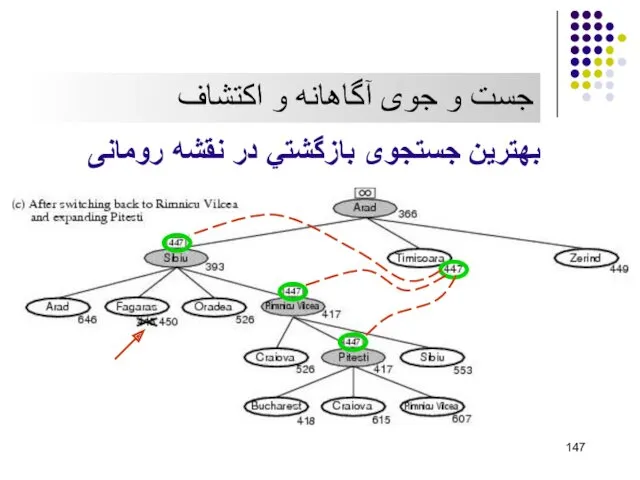
- 147. بهترين جستجوی بازگشتي در نقشه رومانی جست و جوی آگاهانه و اکتشاف
- 148. جست و جوی آگاهانه و اکتشاف يادگيری برای جست و جوی بهتر روشهای جست و جوی
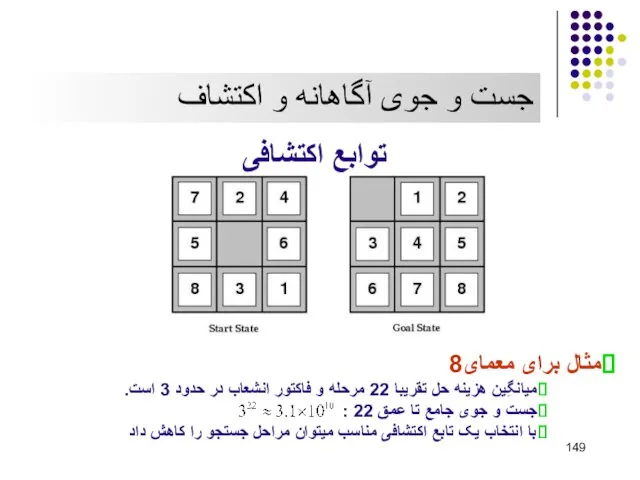
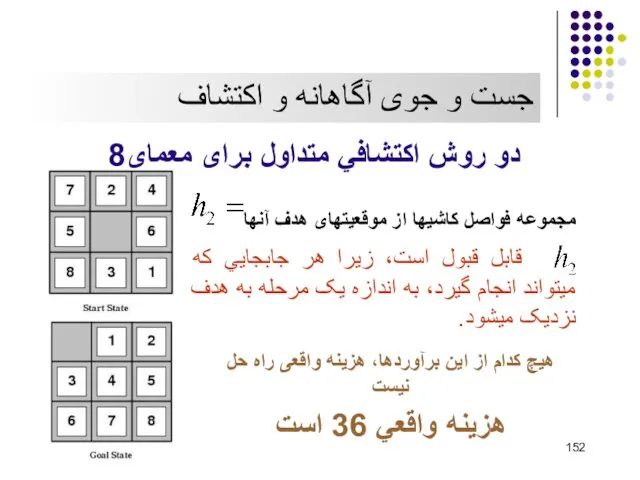
- 149. جست و جوی آگاهانه و اکتشاف توابع اکتشافی مثال برای معمای8 ميانگِين هزينه حل تقريبا 22
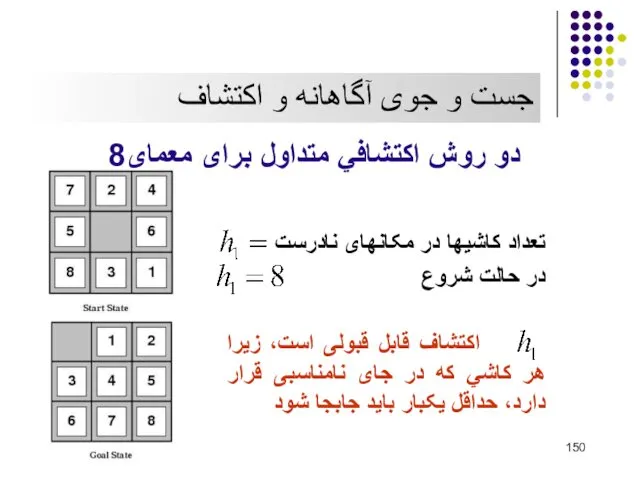
- 150. جست و جوی آگاهانه و اکتشاف دو روش اکتشافي متداول برای معمای8 تعداد کاشيها در مکانهای
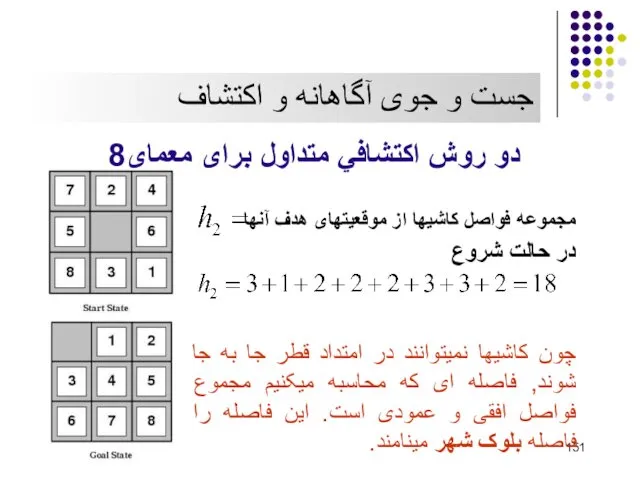
- 151. جست و جوی آگاهانه و اکتشاف دو روش اکتشافي متداول برای معمای8 مجموعه فواصل کاشيها از
- 152. جست و جوی آگاهانه و اکتشاف دو روش اکتشافي متداول برای معمای8 مجموعه فواصل کاشيها از
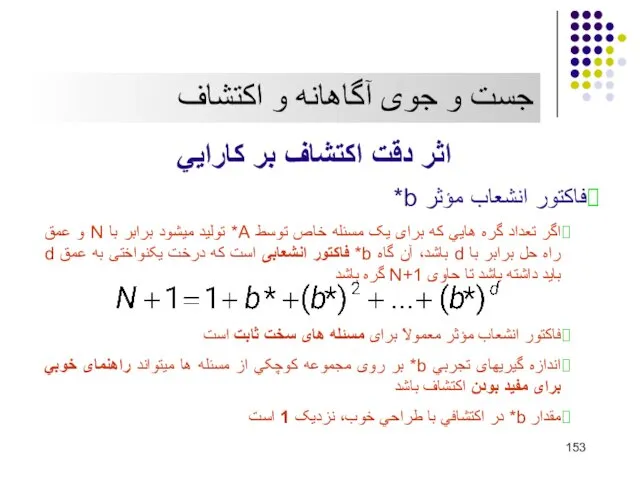
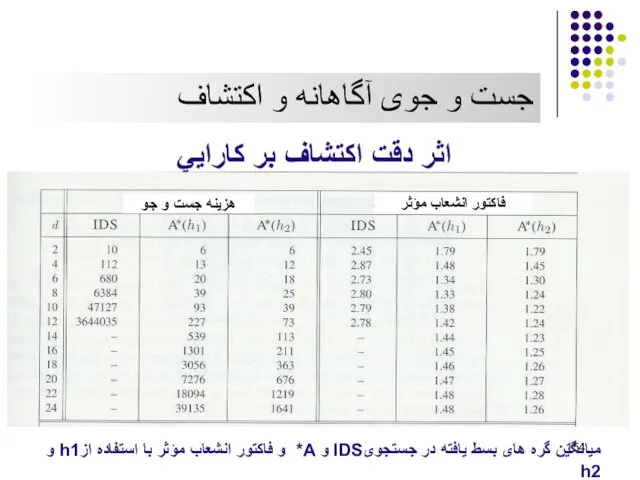
- 153. جست و جوی آگاهانه و اکتشاف اثر دقت اکتشاف بر کارايي فاکتور انشعاب مؤثر b* اگر
- 154. جست و جوی آگاهانه و اکتشاف اثر دقت اکتشاف بر کارايي هزينه جست و جو فاکتور
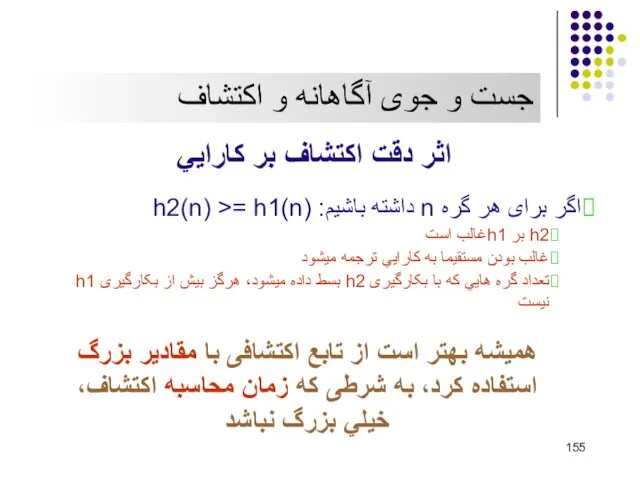
- 155. جست و جوی آگاهانه و اکتشاف اثر دقت اکتشاف بر کارايي اگر برای هر گره n
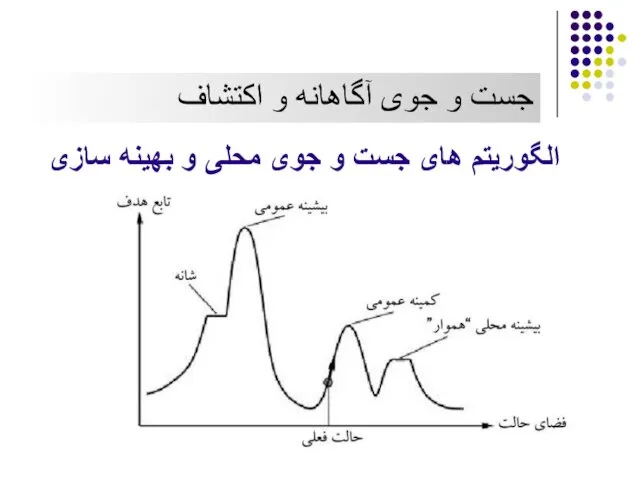
- 156. جست و جوی آگاهانه و اکتشاف الگوريتم های جست و جوی محلی و بهينه سازی الگوريتم
- 157. جست و جوی آگاهانه و اکتشاف الگوريتم های جست و جوی محلی و بهينه سازی
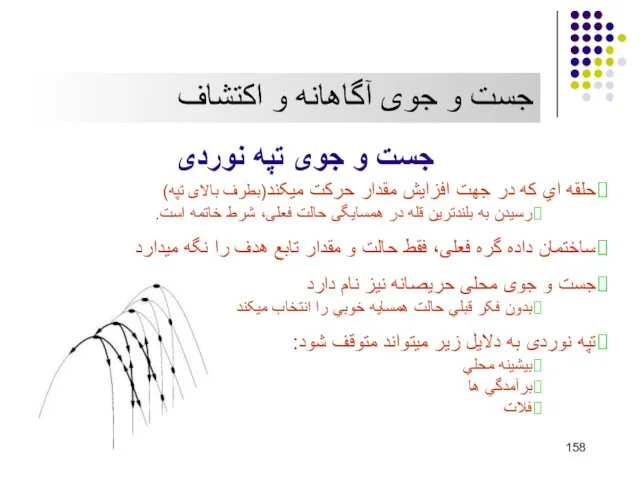
- 158. جست و جوی تپه نوردی جست و جوی آگاهانه و اکتشاف حلقه اي که در جهت
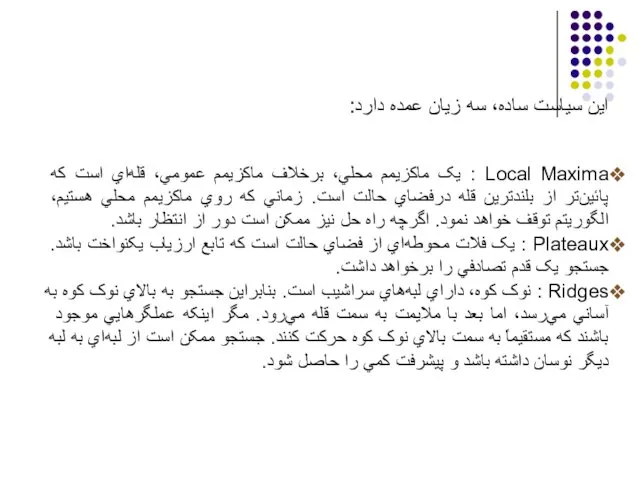
- 159. اين سياست ساده، سه زيان عمده دارد: Local Maxima : يک ماکزيمم محلي، برخلاف ماکزيمم عمومي،
- 160. جست و جوی آگاهانه و اکتشاف انواع تپه نوردی: تپه نوردی غيرقطعی، تپه نوردی اولين انتخاب،
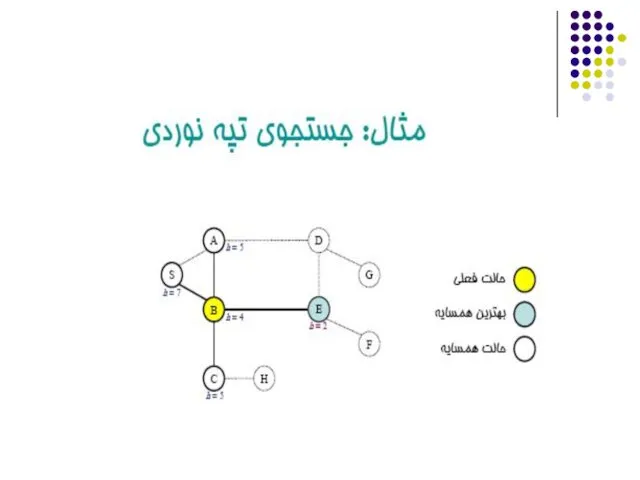
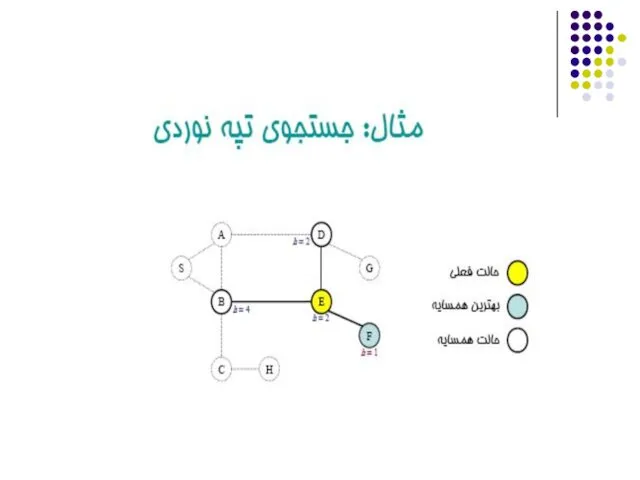
- 161. جست و جوی آگاهانه و اکتشاف مثال جست و جوی تپه نوردی الف- حالت با هزينه
- 167. هوش مصنوعي فصل ششم جستجوی خصمانه
- 168. هوش مصنوعي Artificial Intelligence فهرست بازيها چيستند و چرا مطالعه ميشوند؟ انواع بازيها الگوريتم minimax بازيهای
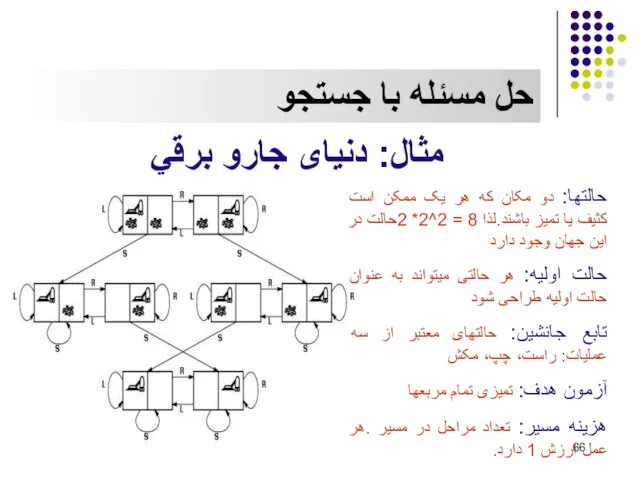
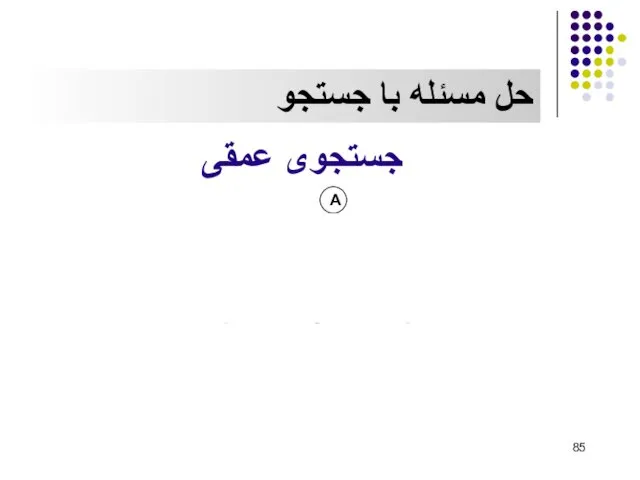
- 169. جستجوی خصمانه مثال: هرس آلفا-بتا [-∞,2] [3,+∞] [3,3] این گره برایMax مناسب نيست
- 170. جستجوی خصمانه اثر افق وقتی بوجود مي آيد که برنامه با اثری از رقيب مواجه شود
- 171. هوش مصنوعي فصل هفتم عامل های منطقی
- 172. هوش مصنوعي Artificial Intelligence فهرست عاملهای مبتنی بر دانش منطق منطق گزاره ای الگوهای استدلال در
- 173. عاملهای منطقی عاملهای مبتنی بر دانش مؤلفه اصلي عامل مبتنی بر دانش، پايگاه دانش آن است
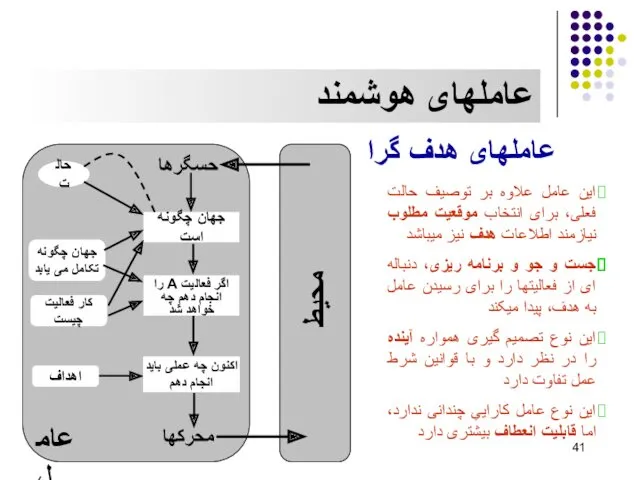
- 174. عاملهای منطقی عاملهای مبتنی بر دانش عامل مبتنی بر دانش بايد بتواند: نمايش حالات و فعاليتها
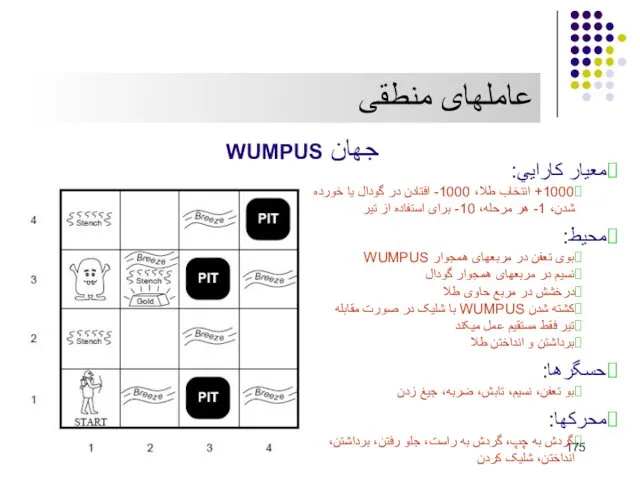
- 175. عاملهای منطقی جهان WUMPUS معيار کارايي: 1000+ انتخاب طلا، 1000- افتادن در گودال يا خورده شدن،
- 176. عاملهای منطقی توصيف جهان WUMPUS قابل مشاهده کامل: خير, فقط ادراک محلي قطعی: بله، نتيجه دقيقا
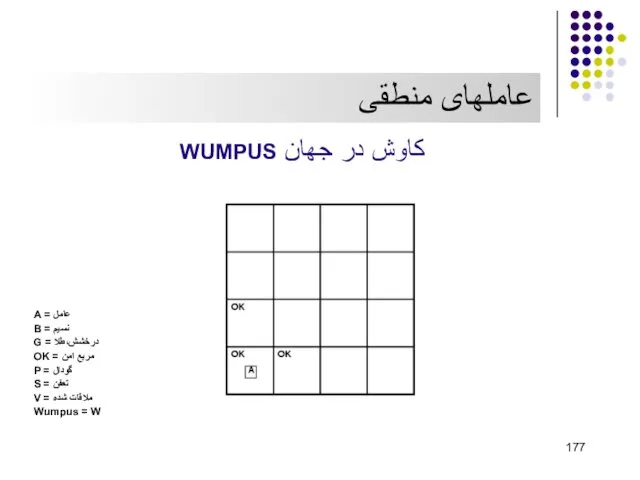
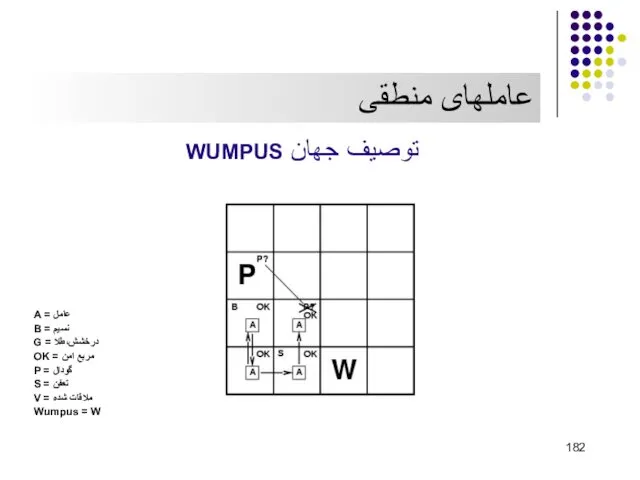
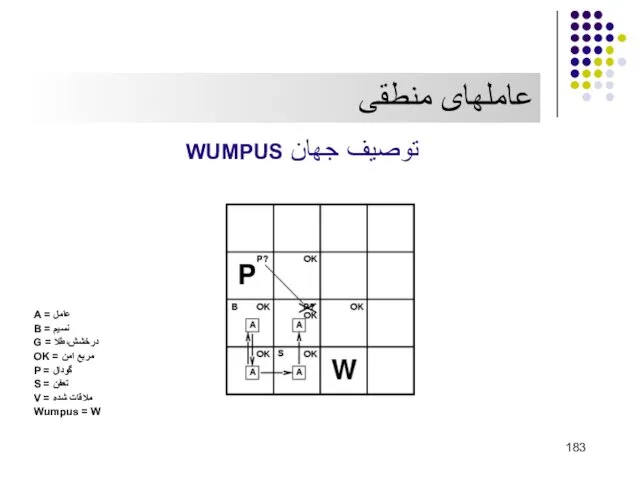
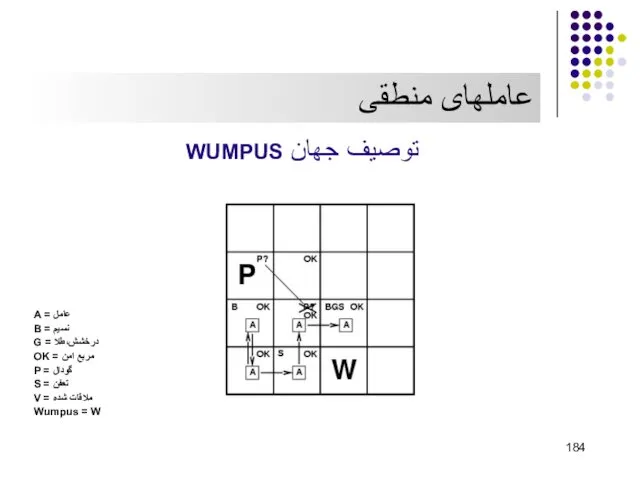
- 177. عاملهای منطقی کاوش در جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع
- 178. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 179. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 180. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 181. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 182. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 183. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 184. عاملهای منطقی توصيف جهان WUMPUS عامل = A نسيم = B درخشش،طلا = G مربع امن
- 185. عاملهای منطقی منطق يک زبان رسمي: ترکيب(نحو): چه کلمه بندی صحيح است.(خوش فرم) معناشناسی: يک کلمه
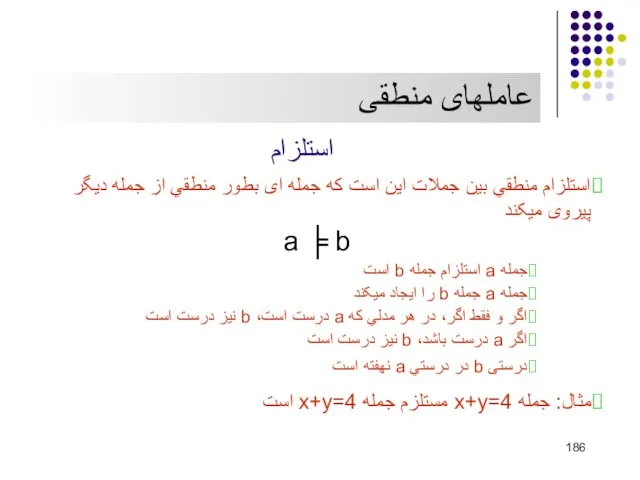
- 186. عاملهای منطقی استلزام استلزام منطقي بين جملات اين است که جمله ای بطور منطقي از جمله
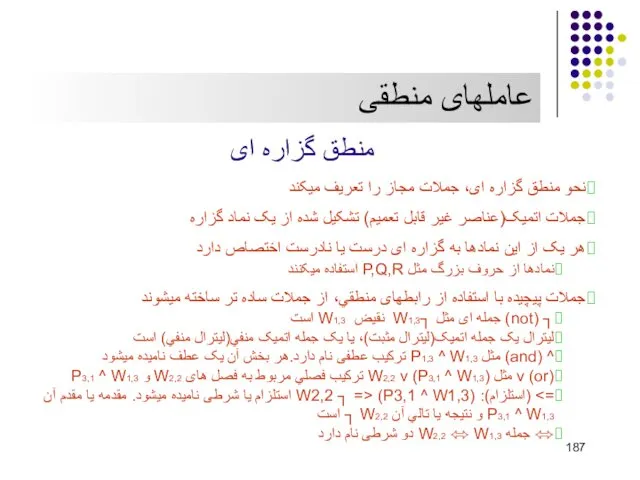
- 187. عاملهای منطقی منطق گزاره ای نحو منطق گزاره ای، جملات مجاز را تعريف ميکند جملات اتميک(عناصر
- 188. عاملهای منطقی منطق گزاره ای
- 189. جدول درستی پنج رابطه منطقی عاملهای منطقی
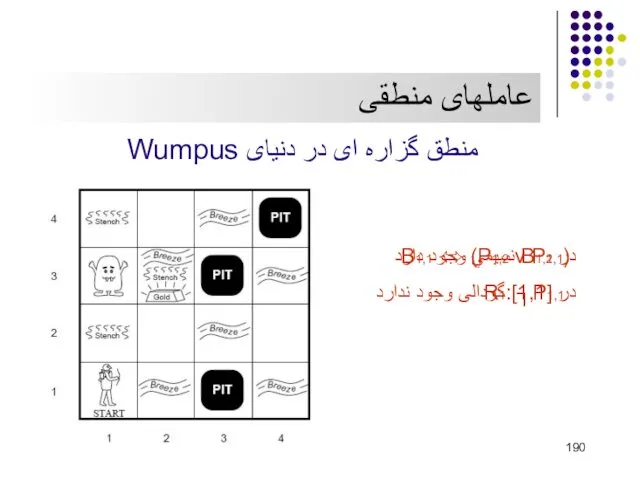
- 190. منطق گزاره ای در دنيای Wumpus عاملهای منطقی در B1,1 نسيمي وجود دارد B1,1 ⬄ (P1,2
- 191. عاملهای منطقی الگوهای استدلال در منطق گزاره ای قوانين استنتاج: الگوهايي استاندارد که زنجيره ای از
- 192. عاملهای منطقی حذف and: هر عطف را ميتوان از ترکيب عطفی استنتاج کرد مثال: WumpusAlive را
- 193. هوش مصنوعي فصل هشتم منطق رتبه اول
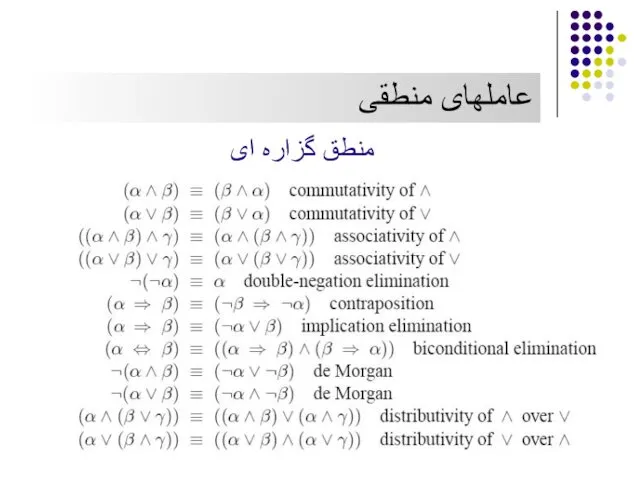
- 194. هوش مصنوعي Artificial Intelligence فهرست مروری بر منطق گزاره ای منطق رتبه اول انواع منطق نحو
- 195. منطق رتبه اول مروری بر منطق گزاره ای ويژگيها ماهيت اعلانی دانش و استنتاج متمايزند و
- 196. منطق رتبه اول منطق رتبه اول اساس منطق گزاره ای را پذيرفته و بر اساس آن
- 197. منطق رتبه اول انواع منطق
- 198. منطق رتبه اول نحو و معنای منطق رتبه اول نمادهای ثابت؛ اشيا را نشان ميدهد. مثال:
- 199. منطق رتبه اول جملات اتميک هر ترم يک عبارت منطقی است که به شيئ اشاره ميکند
- 200. منطق رتبه اول جملات پيچيده با ترکيب جملات اتميک و روابط منطقی ميتوان جملات پيچيده تری
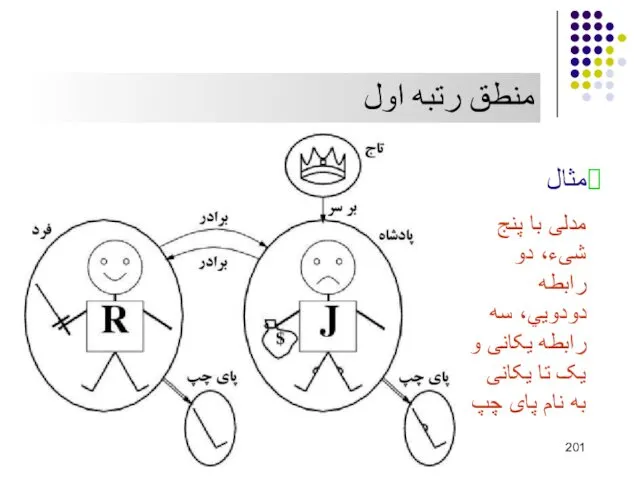
- 201. منطق رتبه اول مثال مدلی با پنج شیء، دو رابطه دودويي، سه رابطه يکانی و يک
- 202. منطق رتبه اول سورها کمک ميکنند تا به جای شمارش اشيا از طريق نام آنها، خواص
- 203. منطق رتبه اول سور عمومی ∀ ∀x P که در آن P يک عبارت منطقي است،
- 204. منطق رتبه اول سور وجودی ∃ ∃ x P که در آن P يک عبارت منطقي
- 205. منطق رتبه اول خصوصيات سورها ⇒ رابط طبيعي برای کار با ∀ و ∧ رابط طبيعي
- 206. منطق رتبه اول خصوصيات سورها “هر کسی بستنی را دوست دارد” به معنای اين است که
- 207. منطق رتبه اول تساوی با استفاده از = دو ترم به يک شیء اشاره ميکنند برای
- 208. منطق رتبه اول ادعاها و تقاضاها جملات از طريق TELL به پايگاه دانش اضافه ميشوند اين
- 209. منطق رتبه اول دامنه خويشاوندی مادر هر فرد والد مؤنث آن فرد است ∀m,c Mother(c) =
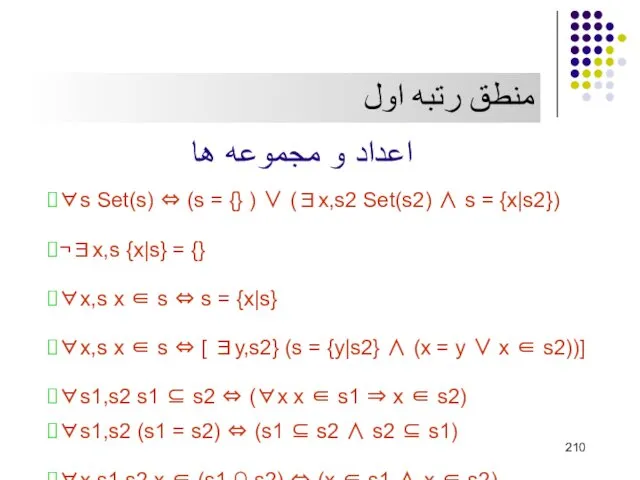
- 210. منطق رتبه اول اعداد و مجموعه ها ∀s Set(s) ⇔ (s = {} ) ∨ (∃x,s2
- 212. Скачать презентацию
هوش مصنوعي
فصل اول
مقدمه
هوش مصنوعي
فصل اول
مقدمه
هوش مصنوعي Artificial Intelligence
فهرست
هوش مصنوعي چيست؟
مباني هوش مصنوعي
تاريخچه هوش مصنوعي
هوش مصنوعي Artificial Intelligence
فهرست
هوش مصنوعي چيست؟
مباني هوش مصنوعي
تاريخچه هوش مصنوعي
مقدمه
هوش مصنوعي چيست؟
مانند انسان فکر کردن
مانند انسان عمل کردن
عاقلانه عمل کردن
عاقلانه فکر کردن
مقدمه
هوش مصنوعي چيست؟
مانند انسان فکر کردن
مانند انسان عمل کردن
عاقلانه عمل کردن
عاقلانه فکر کردن

مقدمه
مانند انسان عمل کردن Acting humanly
هنر ساخت ماشينهايي که کارهايي را انجام
مقدمه
مانند انسان عمل کردن Acting humanly
هنر ساخت ماشينهايي که کارهايي را انجام
مقدمه (مانند انسان عمل کردن)
تست تورينگ
A
B
کدام انسان است؟
A يا B
مقدمه (مانند انسان عمل کردن)
تست تورينگ
A
B
کدام انسان است؟
A يا B
مقدمه
مانند انسان فکر کردن Thinking humanly
تلاش جديد و هيجان انگيز براي ساخت ماشين
مقدمه
مانند انسان فکر کردن Thinking humanly
تلاش جديد و هيجان انگيز براي ساخت ماشين
مقدمه
عاقلانه فکر کردن Think rationally
مطالعه توانايي هاي ذهني از طريق مدل هاي
مقدمه
عاقلانه فکر کردن Think rationally
مطالعه توانايي هاي ذهني از طريق مدل هاي
مقدمه
عاقلانه عمل کردن Act rationally
طوري عمل کند که بهترين نتيجه را ارائه دهد
هوش
مقدمه
عاقلانه عمل کردن Act rationally
طوري عمل کند که بهترين نتيجه را ارائه دهد
هوش
مقدمه
مباني هوش مصنوعي
فلسفه: منطق، استدلال، ناشي شدن تفکر از مغز فيزيکي، مباني يادگيري،
مقدمه
مباني هوش مصنوعي
فلسفه: منطق، استدلال، ناشي شدن تفکر از مغز فيزيکي، مباني يادگيري،
مقدمه
اقتصاد: نظريه تصميمهاي عقلايي، نظريه بازي
علوم عصبي: نحوه پردازش اطلاعات توسط مغز
نظريه کنترل
مقدمه
اقتصاد: نظريه تصميمهاي عقلايي، نظريه بازي
علوم عصبي: نحوه پردازش اطلاعات توسط مغز
نظريه کنترل
مقدمه
تاريخچه هوش مصنوعي
1943، مک کولوچ و والتر پيتز: ارايه مدل نرون مصنوعي بيتي(
مقدمه
تاريخچه هوش مصنوعي
1943، مک کولوچ و والتر پيتز: ارايه مدل نرون مصنوعي بيتي(
مقدمه (تاريخچه هوش مصنوعي)
1956،نشست کارگروهي دورتموند: انتخاب نام هوش مصنوعي
1959، هربرت جلونتر: برنامه(GTP)
مقدمه (تاريخچه هوش مصنوعي)
1956،نشست کارگروهي دورتموند: انتخاب نام هوش مصنوعي
1959، هربرت جلونتر: برنامه(GTP)
مقدمه (تاريخچه هوش مصنوعي)
(1973-1966) کند شدن مسير تحقيقات هوش مصنوعی
پيچيده شدن الگوريتم
مقدمه (تاريخچه هوش مصنوعي)
(1973-1966) کند شدن مسير تحقيقات هوش مصنوعی
پيچيده شدن الگوريتم
مقدمه (تاريخچه هوش مصنوعي)
(1969- 1979) سيستم های مبتنی بر دانش
جست و جوی همه
مقدمه (تاريخچه هوش مصنوعي)
(1969- 1979) سيستم های مبتنی بر دانش
جست و جوی همه
مقدمه (تاريخچه هوش مصنوعي)
1980 تا کنون: تبديل هوش مصنوعی به يک صنعت
1986
مقدمه (تاريخچه هوش مصنوعي)
1980 تا کنون: تبديل هوش مصنوعی به يک صنعت
1986
هوش مصنوعي
فصل دوم
عاملهاي هوشمند
هوش مصنوعي
فصل دوم
عاملهاي هوشمند
هوش مصنوعي Artificial Intelligence
فهرست
عامل
خواص محيطهای وظيفه
برنامه های عامل
هوش مصنوعي Artificial Intelligence
فهرست
عامل
خواص محيطهای وظيفه
برنامه های عامل
عامل:
به هر چيزي اطلاق ميشود، که قادر به درک محيط پيرامون خود از
عامل:
به هر چيزي اطلاق ميشود، که قادر به درک محيط پيرامون خود از
عوامل انساني
حس کردن: گوش، چشم، ديگر ارگانها
اثرگذاري: دست، پا، بيني، اندامهاي ديگر
عوامل روباتيک
حس
عوامل انساني
حس کردن: گوش، چشم، ديگر ارگانها
اثرگذاري: دست، پا، بيني، اندامهاي ديگر
عوامل روباتيک
حس
عاملهای هوشمند
تابع عامل
رفتار عامل توسط تابع عامل توصيف ميشود که هر دنباله
عاملهای هوشمند
تابع عامل
رفتار عامل توسط تابع عامل توصيف ميشود که هر دنباله
عاملهای هوشمند
عامل
حسگرها
محرکها
?
محيط
ادراک ها
فعاليت ها
عامل
عاملهای هوشمند
عامل
حسگرها
محرکها
?
محيط
ادراک ها
فعاليت ها
عامل
عاملها چگونه بايد عمل کنند؟
عامل منطقي: چيزي است که کار درست انجام ميدهد.
عمل
عاملها چگونه بايد عمل کنند؟
عامل منطقي: چيزي است که کار درست انجام ميدهد.
عمل
آن چه در هر زماني منطقي است به چهار چيز وابسته است:
معيار
آن چه در هر زماني منطقي است به چهار چيز وابسته است:
معيار
رفتار عامل وابسته به دنباله ادراکي تا حال است.
عامل را بايد بهعنوان ابزاري
رفتار عامل وابسته به دنباله ادراکي تا حال است.
عامل را بايد بهعنوان ابزاري
خودمختاري:
اگر رفتار عامل هاي تنها مبتني بر دانش دروني باشد و هيچ توجهي
خودمختاري:
اگر رفتار عامل هاي تنها مبتني بر دانش دروني باشد و هيچ توجهي
ارتباط بين عامل و محيط: اعمال بوسيله عامل بر محيط انجام ميشود، که
ارتباط بين عامل و محيط: اعمال بوسيله عامل بر محيط انجام ميشود، که
قابل دسترسي در مقابل غيرقابل دسترسي
محيط قابل دسترسي: محيطي که عامل آن
قابل دسترسي در مقابل غيرقابل دسترسي
محيط قابل دسترسي: محيطي که عامل آن
قطعي در مقابل غير قطعي
محيط قطعي: محيطي است که دقيقا بدانيم
قطعي در مقابل غير قطعي
محيط قطعي: محيطي است که دقيقا بدانيم
اپيزوديک در مقابل غير اپيزوديک
درمحيط اپيزوديک (episodic)، تجربه عامل به
اپيزوديک در مقابل غير اپيزوديک
درمحيط اپيزوديک (episodic)، تجربه عامل به
ايستا در مقابل پويا
محيط پويا: محيطي که در حين سنجيدن عامل
ايستا در مقابل پويا
محيط پويا: محيطي که در حين سنجيدن عامل
گسسته در مقابل پيوسته
محيط گسسته: اگر تعداد محدود و مجزا از
گسسته در مقابل پيوسته
محيط گسسته: اگر تعداد محدود و مجزا از
مثالهايي از انواع محيط و ويژگيهاي آنها
محيط عاملهای هوشمند
مثالهايي از انواع محيط و ويژگيهاي آنها
محيط عاملهای هوشمند

برنامههاي محيط
شبيهساز يک يا چند عامل را به عنوان ورودي
برنامههاي محيط
شبيهساز يک يا چند عامل را به عنوان ورودي
عاملهای هوشمند
ساختار عاملها
برنامه + معماری = عامل
کار هوش مصنوعی طراحی برنامه عامل است
عاملهای هوشمند
ساختار عاملها
برنامه + معماری = عامل
کار هوش مصنوعی طراحی برنامه عامل است
عاملهای هوشمند
برنامه های عامل
عاملهای واکنشی ساده
عاملهای هدف گرا
عاملهای واکنشی مدل گرا
عاملهای
عاملهای هوشمند
برنامه های عامل
عاملهای واکنشی ساده
عاملهای هدف گرا
عاملهای واکنشی مدل گرا
عاملهای

عاملهای هوشمند
عامل عالـِم Omni science))
خروجی واقعی فعاليت خود را ميداند و
عاملهای هوشمند
عامل عالـِم Omni science))
خروجی واقعی فعاليت خود را ميداند و
عاملهای واکنشی ساده
عاملهای هوشمند
عامل
محيط
حسگرها
جهان چگونه است
محرکها
قانون
شرط عمل
اکنون چه عملی بايد انجام دهم
اين عاملها
عاملهای واکنشی ساده
عاملهای هوشمند
عامل
محيط
حسگرها
جهان چگونه است
محرکها
قانون
شرط عمل
اکنون چه عملی بايد انجام دهم
اين عاملها
عاملهای هوشمند
function REFLEX-VACUUM-AGENT ([location, status]) return an action
if status == Dirty then return
عاملهای هوشمند
function REFLEX-VACUUM-AGENT ([location, status]) return an action
if status == Dirty then return
![عاملهای هوشمند function REFLEX-VACUUM-AGENT ([location, status]) return an action if status == Dirty](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/47633/slide-38.jpg)
عاملهای هوشمند
عاملهای واکنشي مدل گرا
عامل
محيط
حسگرها
جهان چگونه است
محرکها
قانون
شرط عمل
اکنون چه عملی بايد انجام دهم
استفاده
عاملهای هوشمند
عاملهای واکنشي مدل گرا
عامل
محيط
حسگرها
جهان چگونه است
محرکها
قانون
شرط عمل
اکنون چه عملی بايد انجام دهم
استفاده
عاملهای هوشمند
عاملهای هدف گرا
عامل
محيط
حسگرها
جهان چگونه است
محرکها
اهداف
اکنون چه عملی بايد انجام دهم
حالت
جهان چگونه تکامل
عاملهای هوشمند
عاملهای هدف گرا
عامل
محيط
حسگرها
جهان چگونه است
محرکها
اهداف
اکنون چه عملی بايد انجام دهم
حالت
جهان چگونه تکامل
عاملهای هوشمند
عاملهای سودمند
عامل
محيط
حسگرها
جهان چگونه است
محرکها
سودمند
اکنون چه عملی بايد انجام دهم
حالت
جهان چگونه تکامل می
عاملهای هوشمند
عاملهای سودمند
عامل
محيط
حسگرها
جهان چگونه است
محرکها
سودمند
اکنون چه عملی بايد انجام دهم
حالت
جهان چگونه تکامل می
عاملهای هوشمند
عاملهای يادگيرنده
عامل
حسگرها
محرکها
عنصرِِيادگيرنده مسئول ايجاد بهبودها
عنصر کارايي مسئول انتخاب فعاليتهای خارجی
منتقد مشخص
عاملهای هوشمند
عاملهای يادگيرنده
عامل
حسگرها
محرکها
عنصرِِيادگيرنده مسئول ايجاد بهبودها
عنصر کارايي مسئول انتخاب فعاليتهای خارجی
منتقد مشخص
تفاوت عاملهاي واکنشي و هدفگرا:
در طراحي عاملهاي واکنشي طراح براي حالات متفاوت عملي
تفاوت عاملهاي واکنشي و هدفگرا:
در طراحي عاملهاي واکنشي طراح براي حالات متفاوت عملي
براي عامل واکنشي ما مجبور به دوباره نويسي تعداد زيادي قوانين شرط –عمل
براي عامل واکنشي ما مجبور به دوباره نويسي تعداد زيادي قوانين شرط –عمل
هوش مصنوعي
فصل سوم
حل مسئله با جستجو
هوش مصنوعي
فصل سوم
حل مسئله با جستجو
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای حل مسئله
مسئله
اندازه گيری کارايي حل مسئله
جستجوی ناآگاهانه
اجتناب از حالتهای
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای حل مسئله
مسئله
اندازه گيری کارايي حل مسئله
جستجوی ناآگاهانه
اجتناب از حالتهای
يک نوع عامل هدفگرا، عامل حل مسئله ناميده ميشود.
عاملهاي حل مسئله توسط يافتن
يک نوع عامل هدفگرا، عامل حل مسئله ناميده ميشود.
عاملهاي حل مسئله توسط يافتن
عاملهاي حل مسئله
عاملهاي هوشمند به طريقي عمل ميکنند که محيط مستقيماً به
عاملهاي حل مسئله
عاملهاي هوشمند به طريقي عمل ميکنند که محيط مستقيماً به
فاز اجرايي: مرحلهاي است که در آن زمان، راهحلي پيدا ميشود و عمليات
فاز اجرايي: مرحلهاي است که در آن زمان، راهحلي پيدا ميشود و عمليات
حل مسئله با جستجو
عاملهای حل مسئله
چهار گام اساسي برای حل مسائل
فرموله کردن هدف:
حل مسئله با جستجو
عاملهای حل مسئله
چهار گام اساسي برای حل مسائل
فرموله کردن هدف:
پس از فرمولهسازي يک هدف و يک مسئله براي حل عامل،
رويه جستجويي
پس از فرمولهسازي يک هدف و يک مسئله براي حل عامل،
رويه جستجويي
چهار نوع اساسي از مسائل وجود دارند:
مسائل تک حالته (Single-state)
مسائل چند
چهار نوع اساسي از مسائل وجود دارند:
مسائل تک حالته (Single-state)
مسائل چند

مسائل و راهحلهاي خوب تعريف شده
مسئله: در واقع مجموعهاي از اطلاعات است که
مسائل و راهحلهاي خوب تعريف شده
مسئله: در واقع مجموعهاي از اطلاعات است که
براي تعريف يک مسئله موارد زير نياز داريم:
وضعيت آغازين (initial state) که
براي تعريف يک مسئله موارد زير نياز داريم:
وضعيت آغازين (initial state) که
براي حل مسئله چند حالته، فقط به يک اصلاح جزئي نياز داريم:
يک مسئله
براي حل مسئله چند حالته، فقط به يک اصلاح جزئي نياز داريم:
يک مسئله
يک عملگر:
توسط اجتماع نتايج اعمال عملگر در هر وضعيت مجموعه، به کار برده
يک عملگر:
توسط اجتماع نتايج اعمال عملگر در هر وضعيت مجموعه، به کار برده
اندازهگيري کارايي حل مسئله:
کارايي يک جستجو، حداقل از سه طريق ميتواند اندازهگيري شود:
آيا
اندازهگيري کارايي حل مسئله:
کارايي يک جستجو، حداقل از سه طريق ميتواند اندازهگيري شود:
آيا
انتخاب حالات و عمليات
هنر واقعي حل مسئله، تصميمگيري در مورد اين است که
انتخاب حالات و عمليات
هنر واقعي حل مسئله، تصميمگيري در مورد اين است که
انتزاع:
فرآيند حذف جزئيات از يک بارنمايي انتزاع (abstraction) ناميده ميشود.
همانگونه که تعريف
انتزاع:
فرآيند حذف جزئيات از يک بارنمايي انتزاع (abstraction) ناميده ميشود.
همانگونه که تعريف
حل مسئله با جستجو
مثال: نقشه رومانی
حل مسئله با جستجو
مثال: نقشه رومانی
حل مسئله با جستجو
صورت مسأله: رفتن از آراد به بخارست
فرموله کردن هدف: رسيدن
حل مسئله با جستجو
صورت مسأله: رفتن از آراد به بخارست
فرموله کردن هدف: رسيدن
حل مسئله با جستجو
مسئله
حالت اوليه: حالتی که عامل از آن شروع ميکند.
در
حل مسئله با جستجو
مسئله
حالت اوليه: حالتی که عامل از آن شروع ميکند.
در
حل مسئله با جستجو
آزمون هدف: تعيين ميکند که آيا حالت خاصی، حالت هدف
حل مسئله با جستجو
آزمون هدف: تعيين ميکند که آيا حالت خاصی، حالت هدف
حل مسئله با جستجو
مثال: دنيای جارو برقي
حالتها: دو مکان که هر يک ممکن
حل مسئله با جستجو
مثال: دنيای جارو برقي
حالتها: دو مکان که هر يک ممکن
حل مسئله با جستجو
مثال: دنيای جارو برقي
حالتها: دو مکان که هر يک ممکن
حل مسئله با جستجو
مثال: دنيای جارو برقي
حالتها: دو مکان که هر يک ممکن
حل مسئله با جستجو
مثال: معمای8
معماي 8:
معماي 8 نمونهاي است شامل يک صفحة
حل مسئله با جستجو
مثال: معمای8
معماي 8:
معماي 8 نمونهاي است شامل يک صفحة

حل مسئله با جستجو
مثال: معمای8
حالتها: توصيف وضعيت مکان هر 8 مربع را در
حل مسئله با جستجو
مثال: معمای8
حالتها: توصيف وضعيت مکان هر 8 مربع را در

حل مسئله با جستجو
مثال: مسئله 8 وزير
هدف از مسئله 8 وزير، قرار دادن
حل مسئله با جستجو
مثال: مسئله 8 وزير
هدف از مسئله 8 وزير، قرار دادن
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی افزايشي
حالتها: هر ترتيبي از 0
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی افزايشي
حالتها: هر ترتيبي از 0
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی حالت کامل
حالتها: چيدمان n وزير
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی حالت کامل
حالتها: چيدمان n وزير
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی حالت کامل
حالتها: چيدمان n وزير
حل مسئله با جستجو
مثال: مسئله 8 وزير
فرمول بندی حالت کامل
حالتها: چيدمان n وزير

مسيريابي:
الگوريتمهاي مسير يابي کاربردهاي زيادي دراند، مانند مسيريابي در شبکههاي کامپيوتري، سيستمهاي خودکار
مسيريابي:
الگوريتمهاي مسير يابي کاربردهاي زيادي دراند، مانند مسيريابي در شبکههاي کامپيوتري، سيستمهاي خودکار
مسائل فروشنده دوره گرد و تور :
مسئله فروشنده دوره گرد مسئله مشهوري است
مسائل فروشنده دوره گرد و تور :
مسئله فروشنده دوره گرد مسئله مشهوري است
حل مسئله با جستجو
اندازه گيری کارايي حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند
حل مسئله با جستجو
اندازه گيری کارايي حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند
حل مسئله با جستجو
اندازه گيری کارايي حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند
حل مسئله با جستجو
اندازه گيری کارايي حل مسئله
کامل بودن: آيا الگوريتم تضمين ميکند
حل مسئله با جستجو
جستجوی ناآگاهانه
ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از
حل مسئله با جستجو
جستجوی ناآگاهانه
ناآگاهی اين است که الگوريتم هيچ اطلاعاتی غير از
در اين استراتژي که بسيار سيستماتيک است، ابتدا گره ريشه، و سپس تمام
در اين استراتژي که بسيار سيستماتيک است، ابتدا گره ريشه، و سپس تمام
حل مسئله با جستجو
جستجوی عرضی
حل مسئله با جستجو
جستجوی عرضی
حل مسئله با جستجو
جستجوی عرضی
کامل بودن: بله
بهينگی: بله (مشروط)
در صورتی بهينه است که
حل مسئله با جستجو
جستجوی عرضی
کامل بودن: بله
بهينگی: بله (مشروط)
در صورتی بهينه است که
حل مسئله با جستجو
جستجوی هزينه يکنواخت
در اين روش گره اي بسط داده مي
حل مسئله با جستجو
جستجوی هزينه يکنواخت
در اين روش گره اي بسط داده مي
حل مسئله با جستجو
جستجوی هزينه يکنواخت
اين جستجو گره n را با کمترين هزينه
حل مسئله با جستجو
جستجوی هزينه يکنواخت
اين جستجو گره n را با کمترين هزينه
حل مسئله با جستجو
کامل بودن: بله
هزينه هر مرحله بزرگتر يا مساوی يک مقدار
حل مسئله با جستجو
کامل بودن: بله
هزينه هر مرحله بزرگتر يا مساوی يک مقدار
اين استراتژي، يکي از گرهها را در پائينترين سطح درخت بسط ميدهد؛ اما
اين استراتژي، يکي از گرهها را در پائينترين سطح درخت بسط ميدهد؛ اما
حل مسئله با جستجو
جستجوی عمقی
2
3
4
5
6
7
حل مسئله با جستجو
جستجوی عمقی
2
3
4
5
6
7
حل مسئله با جستجو
کامل بودن: خير
اگر زير درخت چپ عمق نامحدود داشت و
حل مسئله با جستجو
کامل بودن: خير
اگر زير درخت چپ عمق نامحدود داشت و
حل مسئله با جستجو
جستجوی عمقی محدود
اين استراتژي، براي رهايي از دامي که جستجوي
حل مسئله با جستجو
جستجوی عمقی محدود
اين استراتژي، براي رهايي از دامي که جستجوي
حل مسئله با جستجو
جستجوی عمقی محدود
مسئله درختهای نامحدود ميتواند به وسيله جست و
حل مسئله با جستجو
جستجوی عمقی محدود
مسئله درختهای نامحدود ميتواند به وسيله جست و
حل مسئله با جستجو
جستجوی عمقی محدود
کامل بودن: خير
اگر L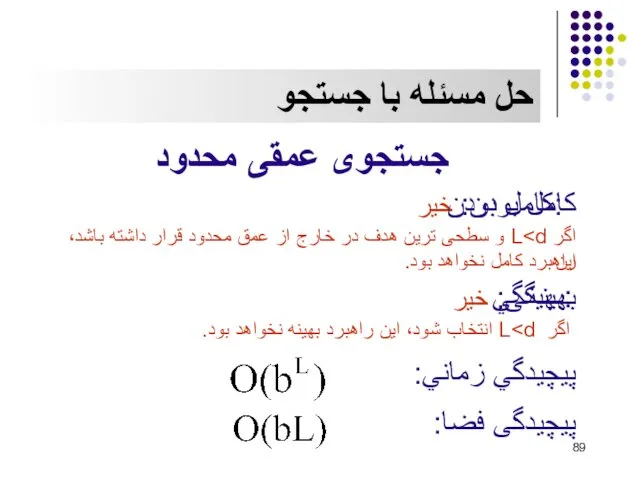
حل مسئله با جستجو
جستجوی عمقی محدود
کامل بودن: خير
اگر L
حل مسئله با جستجو
جستجوی عميق کننده تکراري
قسمت دشوار جستجوي عمقي محدود شده، انتخاب
حل مسئله با جستجو
جستجوی عميق کننده تکراري
قسمت دشوار جستجوي عمقي محدود شده، انتخاب
حل مسئله با جستجو
در جستجوي عميقکننده تکراري، گرههاي سطوح پائيني يک بار بسط
حل مسئله با جستجو
در جستجوي عميقکننده تکراري، گرههاي سطوح پائيني يک بار بسط
حل مسئله با جستجو
جستجوی عميق کننده تکراري
حل مسئله با جستجو
جستجوی عميق کننده تکراري
حل مسئله با جستجو
جستجوی عميق کننده تکراري
حل مسئله با جستجو
جستجوی عميق کننده تکراري
حل مسئله با جستجو
جستجوی عميق کننده تکراري
A
B
C
D
E
F
G
H
I
J
K
L
N
M
O
P
Q
S
R
حل مسئله با جستجو
جستجوی عميق کننده تکراري
A
B
C
D
E
F
G
H
I
J
K
L
N
M
O
P
Q
S
R
حل مسئله با جستجو
جستجوی عميق کننده تکراري
کامل بودن: بله
در صورتی که فاکتور انشعاب
حل مسئله با جستجو
جستجوی عميق کننده تکراري
کامل بودن: بله
در صورتی که فاکتور انشعاب
حل مسئله با جستجو
نكته : پيچيدگي زماني اين جستجو هنوز O(bd/2) است، اگر
حل مسئله با جستجو
نكته : پيچيدگي زماني اين جستجو هنوز O(bd/2) است، اگر
حل مسئله با جستجو
جستجوی دو طرفه
انجام دو جست و جوی همزمان، يکي از
حل مسئله با جستجو
جستجوی دو طرفه
انجام دو جست و جوی همزمان، يکي از
حل مسئله با جستجو
جستجوی دو طرفه
کامل بودن: بله
اگر هر دو جستجو، عرضی باشند
حل مسئله با جستجو
جستجوی دو طرفه
کامل بودن: بله
اگر هر دو جستجو، عرضی باشند
مقايسه استراتژيهاي جستجو:
ارزيابي استراتژيهاي جستجو. b فاکتور انشعاب، d عمل پاسخ، m ماکزيمم
مقايسه استراتژيهاي جستجو:
ارزيابي استراتژيهاي جستجو. b فاکتور انشعاب، d عمل پاسخ، m ماکزيمم
حل مسئله با جستجو
اجتناب از حالتهای تکراری
وجود حالتهای تکراری در يک مسئله قابل
حل مسئله با جستجو
اجتناب از حالتهای تکراری
وجود حالتهای تکراری در يک مسئله قابل
حل مسئله با جستجو
جستجو با اطلاعات ناقص
مسئله های فاقد حسگر: اگر عامل فاقد
حل مسئله با جستجو
جستجو با اطلاعات ناقص
مسئله های فاقد حسگر: اگر عامل فاقد
حل مسئله با جستجو
مثال: دنيای جاروبرقی فاقد حسگر
عامل جارو تمام اثرات فعاليتهايش را
حل مسئله با جستجو
مثال: دنيای جاروبرقی فاقد حسگر
عامل جارو تمام اثرات فعاليتهايش را
حل مسئله با جستجو
دنيای جاروبرقی فاقد حسگر
عامل بايد راجع به مجموعه هاي حالتی
حل مسئله با جستجو
دنيای جاروبرقی فاقد حسگر
عامل بايد راجع به مجموعه هاي حالتی
هوش مصنوعي
فصل چهارم
جست و جوی آگاهانه و اکتشاف
هوش مصنوعي
فصل چهارم
جست و جوی آگاهانه و اکتشاف
هوش مصنوعي Artificial Intelligence
فهرست
متدهای جست و جوی آگاهانه
يادگيری برای جست و جوی بهتر
جست
هوش مصنوعي Artificial Intelligence
فهرست
متدهای جست و جوی آگاهانه
يادگيری برای جست و جوی بهتر
جست
جست و جوی آگاهانه و اکتشاف
متدهای جستجوی آگاهانه
بهترين جستجو
حريصانه
A*
IDA*
RBFS
MA* و SMA*
جستجوی محلی و
جست و جوی آگاهانه و اکتشاف
متدهای جستجوی آگاهانه
بهترين جستجو
حريصانه
A*
IDA*
RBFS
MA* و SMA*
جستجوی محلی و

جستجوي بهترين:
اين استراتژي به اين صورت بيان ميشود که در يک درخت، زماني
جستجوي بهترين:
اين استراتژي به اين صورت بيان ميشود که در يک درخت، زماني
حداقل هزينه تخمين زده شده براي رسيدن به هدف: جستجوي حريصانه
يکي از سادهترين
حداقل هزينه تخمين زده شده براي رسيدن به هدف: جستجوي حريصانه
يکي از سادهترين
ويژگيهاي جستجوي حريصانه:
جستجوي حريصانه از لحاظ دنبال کردن يک مسير ويژه در
ويژگيهاي جستجوي حريصانه:
جستجوي حريصانه از لحاظ دنبال کردن يک مسير ويژه در
جست و جوی آگاهانه و اکتشاف
تعاريف
تابع هزينه مسير، g(n) : هزينه مسير از
جست و جوی آگاهانه و اکتشاف
تعاريف
تابع هزينه مسير، g(n) : هزينه مسير از
جست و جوی آگاهانه و اکتشاف
A
B
C
D
E
F
G
H
I
K
M
L
N
O
3
P
Q
J
W
V
X
Y
Z
R
S
T
U
1
1
2
1
3
3
2
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
1
2
5
3
0
1
3
2
3
1
2
2
1
1
2
1
0
2
1
3
1
2
3
3
2
جستجوی حريصانه
جست و جوی آگاهانه و اکتشاف
A
B
C
D
E
F
G
H
I
K
M
L
N
O
3
P
Q
J
W
V
X
Y
Z
R
S
T
U
1
1
2
1
3
3
2
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
1
2
5
3
0
1
3
2
3
1
2
2
1
1
2
1
0
2
1
3
1
2
3
3
2
جستجوی حريصانه
جست و جوی آگاهانه و اکتشاف
A
B
C
D
E
F
G
N
O
3
X
1
1
2
1
1
1
1
3
1
2
5
3
0
3
1
3
2
جستجوی حريصانه
جست و جوی آگاهانه و اکتشاف
A
B
C
D
E
F
G
N
O
3
X
1
1
2
1
1
1
1
3
1
2
5
3
0
3
1
3
2
جستجوی حريصانه
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
A
F
G
H
I
M
L
N
O
P
Q
W
V
X
Y
Z
R
S
T
U
1
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
3
2
3
1
2
2
1
1
2
1
0
2
1
3
1
2
3
3
3
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
A
F
G
H
I
M
L
N
O
P
Q
W
V
X
Y
Z
R
S
T
U
1
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
3
2
3
1
2
2
1
1
2
1
0
2
1
3
1
2
3
3
3
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
A
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
A
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
کامل بودن: خير
اما اگر h = h*
جست و جوی آگاهانه و اکتشاف
جستجوی حريصانه
کامل بودن: خير
اما اگر h = h*
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
B/4
C/4
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
B/4
C/4
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
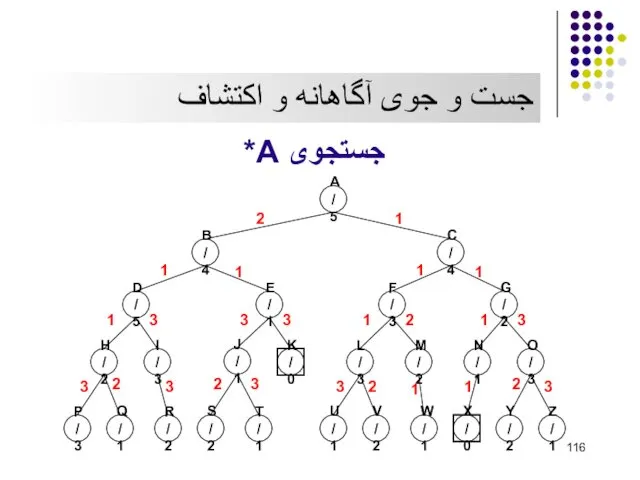
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
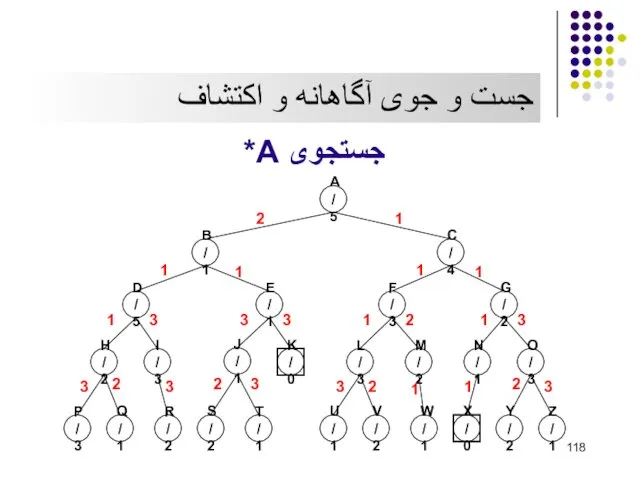
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
B/1
C/4
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
جست و جوی آگاهانه و اکتشاف
جستجوی A*
A/5
B/1
C/4
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
B/1
C/9
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
B/1
C/9
D/5
E/1
F/3
G/2
H/2
I/3
K/0
M/2
L/3
N/1
O/3
2
P/3
Q/1
J/1
W/1
V/2
X/0
Y/2
Z/1
R/2
S/2
T/1
U/1
1
1
1
1
3
3
3
3
2
3
2
3
1
1
1
2
3
2
1
1
1
3
2
3
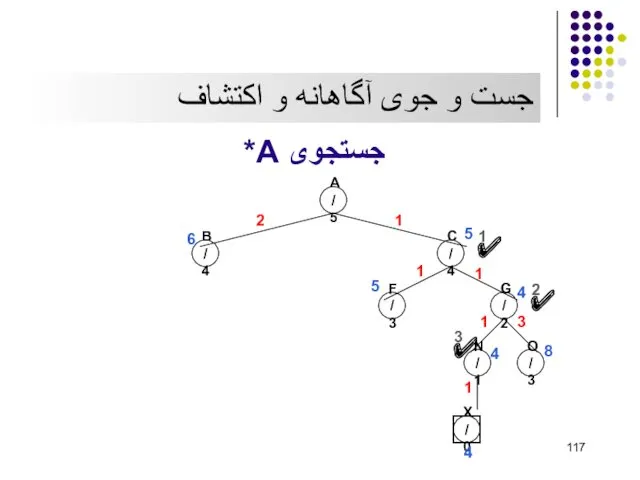
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
جستجوی A*
جست و جوی آگاهانه و اکتشاف
A/5
جستجوی A*
جست و جوی آگاهانه و اکتشاف
کامل بودن: بله
بهينگی: بله
پيچيدگي زماني:
پيچيدگی فضا:
جستجوی A*
جست و جوی آگاهانه و اکتشاف
کامل بودن: بله
بهينگی: بله
پيچيدگي زماني:
پيچيدگی فضا:
رفتار جستجوي A*
نگاهي گذرا به اثبات کامل و بهينه بودن A*:
مشاهده مقدماتي:
تقريباً تمام
رفتار جستجوي A*
نگاهي گذرا به اثبات کامل و بهينه بودن A*:
مشاهده مقدماتي:
تقريباً تمام
بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة
بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة
h*(n) : هزينه واقعي رسيدن از n به هدف است.
در استفاده عملي، خطاها
h*(n) : هزينه واقعي رسيدن از n به هدف است.
در استفاده عملي، خطاها
جست و جوی آگاهانه و اکتشاف
h ≤ h*
h ≤ h*
/
جستجوی A*
جست و جوی آگاهانه و اکتشاف
h ≤ h*
h ≤ h*
/
جستجوی A*
جست و جوی آگاهانه و اکتشاف
جستجوی A*
h ≤ h*
h ≤ h*
/
جست و جوی آگاهانه و اکتشاف
جستجوی A*
h ≤ h*
h ≤ h*
/
جست و جوی آگاهانه و اکتشاف
A/100
B/80
C/95
E/86
F/78
G/90
T/60
H/80
J/82
N/72
L/80
K/85
W/52
X/58
M/75
Y/47
Z/50
O/78
P/79
D/90
M/75
I/87
P/79
O/78
U/81
V/83
T/60
R/20
W/52
X/58
Y/47
Z/50
S/70
10
جستجوی A* و اجتناب از گره های تکراری
هزينه
جست و جوی آگاهانه و اکتشاف
A/100
B/80
C/95
E/86
F/78
G/90
T/60
H/80
J/82
N/72
L/80
K/85
W/52
X/58
M/75
Y/47
Z/50
O/78
P/79
D/90
M/75
I/87
P/79
O/78
U/81
V/83
T/60
R/20
W/52
X/58
Y/47
Z/50
S/70
10
جستجوی A* و اجتناب از گره های تکراری
هزينه
جست و جوی آگاهانه و اکتشاف
جستجوی A* و اجتناب از گره های تکراری
A/100
?
?
جست و جوی آگاهانه و اکتشاف
جستجوی A* و اجتناب از گره های تکراری
A/100
?
?
جست و جوی آگاهانه و اکتشاف
مثال ديگر از جستجوی A*
f(n)=g(n) + h(n)
جست و جوی آگاهانه و اکتشاف
مثال ديگر از جستجوی A*
f(n)=g(n) + h(n)
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
جستجوی Bucharest با شروع
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
جستجوی Bucharest با شروع
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََArad را باز کرده
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََArad را باز کرده
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََSibiu را باز کرده
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََSibiu را باز کرده
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََRimnicu Vilcea را باز
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََRimnicu Vilcea را باز

جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََ Fagaras را باز
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََ Fagaras را باز
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََ Pitesti را باز
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
ََ Pitesti را باز
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
جستجوی A* در نقشه رومانی
رفتار جستجوي A*
نگاهي گذرا به اثبات کامل و بهينه بودن A*:
مشاهده مقدماتي:
تقريباً تمام
رفتار جستجوي A*
نگاهي گذرا به اثبات کامل و بهينه بودن A*:
مشاهده مقدماتي:
تقريباً تمام
بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة
بنابراين هر گره جديدي که توليد ميشود، بايد کنترل کنيم که آيا هزينة
نكته 2: A* معمولاً قبل از اينکه دچار کمبود زمان شود، دچار کمبود
نكته 2: A* معمولاً قبل از اينکه دچار کمبود زمان شود، دچار کمبود
جست و جوی آگاهانه و اکتشاف
جستجوی اکتشافی با حافظه محدود IDA*
ساده ترين راه
جست و جوی آگاهانه و اکتشاف
جستجوی اکتشافی با حافظه محدود IDA*
ساده ترين راه
بهترين جستجوی بازگشتي RBFS
جست و جوی آگاهانه و اکتشاف
ساختار آن شبيه جست و
بهترين جستجوی بازگشتي RBFS
جست و جوی آگاهانه و اکتشاف
ساختار آن شبيه جست و
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي RBFS
RBFS تا حدی از IDA*
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي RBFS
RBFS تا حدی از IDA*
بهترين جستجوی بازگشتي RBFS
بهترين جستجوی بازگشتي RBFS
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي در نقشه رومانی
بهترين جستجوی بازگشتي در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
بهترين جستجوی بازگشتي در نقشه رومانی
جست و جوی آگاهانه و اکتشاف
جست و جوی آگاهانه و اکتشاف
يادگيری برای جست و جوی بهتر
روشهای جست
جست و جوی آگاهانه و اکتشاف
يادگيری برای جست و جوی بهتر
روشهای جست
جست و جوی آگاهانه و اکتشاف
توابع اکتشافی
مثال برای معمای8
ميانگِين هزينه حل تقريبا 22
جست و جوی آگاهانه و اکتشاف
توابع اکتشافی
مثال برای معمای8
ميانگِين هزينه حل تقريبا 22
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
تعداد کاشيها در
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
تعداد کاشيها در
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
مجموعه فواصل کاشيها
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
مجموعه فواصل کاشيها
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
مجموعه فواصل کاشيها
جست و جوی آگاهانه و اکتشاف
دو روش اکتشافي متداول برای معمای8
مجموعه فواصل کاشيها
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
فاکتور انشعاب مؤثر b*
اگر
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
فاکتور انشعاب مؤثر b*
اگر
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
هزينه جست و جو
فاکتور
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
هزينه جست و جو
فاکتور
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
اگر برای هر گره
جست و جوی آگاهانه و اکتشاف
اثر دقت اکتشاف بر کارايي
اگر برای هر گره
جست و جوی آگاهانه و اکتشاف
الگوريتم های جست و جوی محلی و بهينه
جست و جوی آگاهانه و اکتشاف
الگوريتم های جست و جوی محلی و بهينه
جست و جوی آگاهانه و اکتشاف
الگوريتم های جست و جوی محلی و بهينه
جست و جوی آگاهانه و اکتشاف
الگوريتم های جست و جوی محلی و بهينه
جست و جوی تپه نوردی
جست و جوی آگاهانه و اکتشاف
حلقه اي که در
جست و جوی تپه نوردی
جست و جوی آگاهانه و اکتشاف
حلقه اي که در
اين سياست ساده، سه زيان عمده دارد:
Local Maxima : يک ماکزيمم محلي، برخلاف
اين سياست ساده، سه زيان عمده دارد:
Local Maxima : يک ماکزيمم محلي، برخلاف
جست و جوی آگاهانه و اکتشاف
انواع تپه نوردی:
تپه نوردی غيرقطعی، تپه نوردی اولين
جست و جوی آگاهانه و اکتشاف
انواع تپه نوردی:
تپه نوردی غيرقطعی، تپه نوردی اولين
جست و جوی آگاهانه و اکتشاف
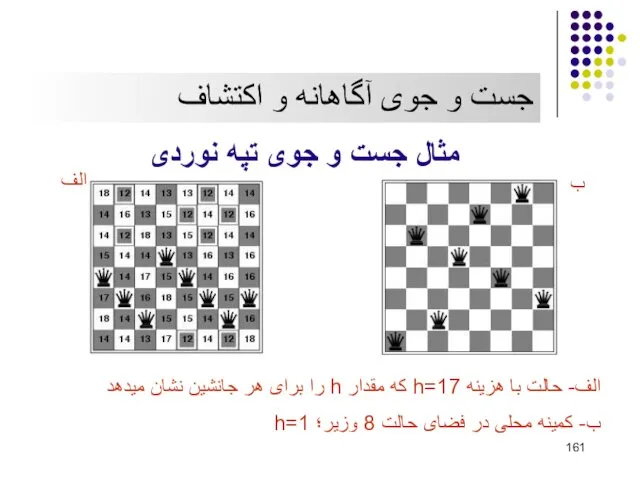
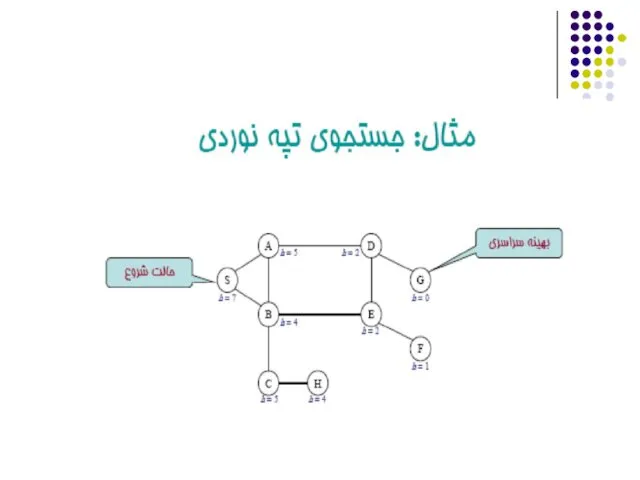
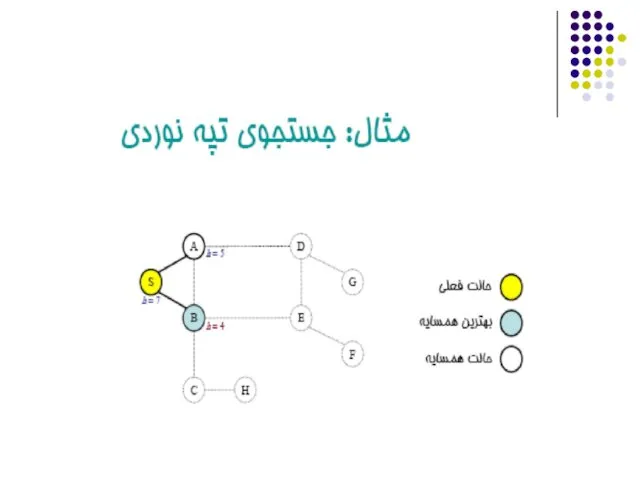
مثال جست و جوی تپه نوردی
الف- حالت با
جست و جوی آگاهانه و اکتشاف
مثال جست و جوی تپه نوردی
الف- حالت با

هوش مصنوعي
فصل ششم
جستجوی خصمانه
هوش مصنوعي
فصل ششم
جستجوی خصمانه
هوش مصنوعي Artificial Intelligence
فهرست
بازيها چيستند و چرا مطالعه ميشوند؟
انواع بازيها
الگوريتم minimax
بازيهای چند نفره
هرس
هوش مصنوعي Artificial Intelligence
فهرست
بازيها چيستند و چرا مطالعه ميشوند؟
انواع بازيها
الگوريتم minimax
بازيهای چند نفره
هرس
جستجوی خصمانه
مثال: هرس آلفا-بتا
[-∞,2]
[3,+∞]
[3,3]
این گره برایMax مناسب نيست
جستجوی خصمانه
مثال: هرس آلفا-بتا
[-∞,2]
[3,+∞]
[3,3]
این گره برایMax مناسب نيست
![جستجوی خصمانه مثال: هرس آلفا-بتا [-∞,2] [3,+∞] [3,3] این گره برایMax مناسب نيست](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/47633/slide-168.jpg)
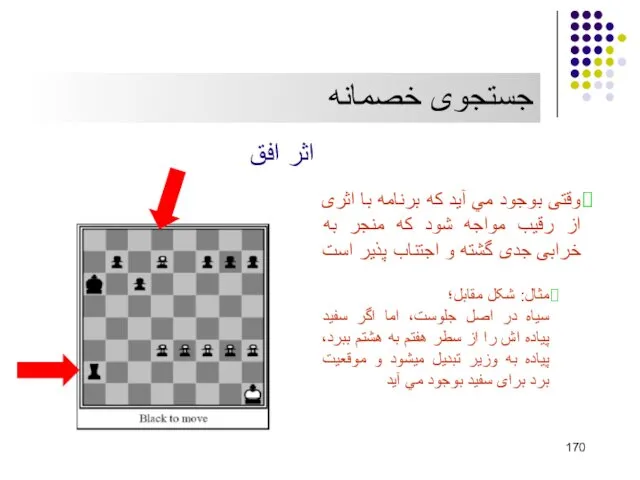
جستجوی خصمانه
اثر افق
وقتی بوجود مي آيد که برنامه با اثری از رقيب مواجه
جستجوی خصمانه
اثر افق
وقتی بوجود مي آيد که برنامه با اثری از رقيب مواجه
هوش مصنوعي
فصل هفتم
عامل های منطقی
هوش مصنوعي
فصل هفتم
عامل های منطقی
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای مبتنی بر دانش
منطق
منطق گزاره ای
الگوهای استدلال در منطق گزاره
هوش مصنوعي Artificial Intelligence
فهرست
عاملهای مبتنی بر دانش
منطق
منطق گزاره ای
الگوهای استدلال در منطق گزاره
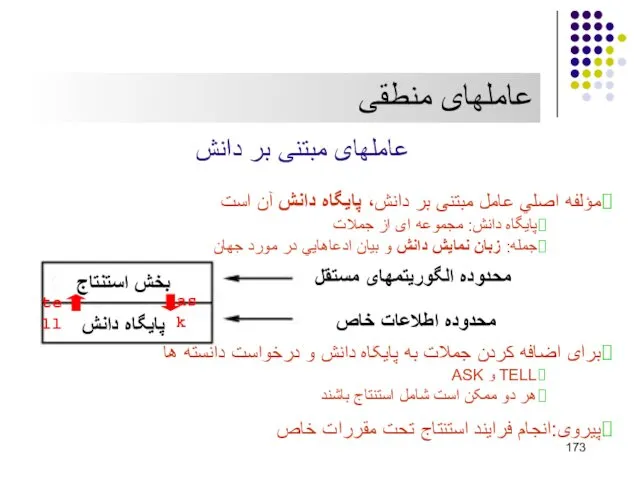
عاملهای منطقی
عاملهای مبتنی بر دانش
مؤلفه اصلي عامل مبتنی بر دانش، پايگاه دانش آن
عاملهای منطقی
عاملهای مبتنی بر دانش
مؤلفه اصلي عامل مبتنی بر دانش، پايگاه دانش آن
عاملهای منطقی
عاملهای مبتنی بر دانش
عامل مبتنی بر دانش بايد بتواند:
نمايش حالات و
عاملهای منطقی
عاملهای مبتنی بر دانش
عامل مبتنی بر دانش بايد بتواند:
نمايش حالات و
عاملهای منطقی
جهان WUMPUS
معيار کارايي:
1000+ انتخاب طلا، 1000- افتادن در گودال يا خورده شدن،
عاملهای منطقی
جهان WUMPUS
معيار کارايي:
1000+ انتخاب طلا، 1000- افتادن در گودال يا خورده شدن،
عاملهای منطقی
توصيف جهان WUMPUS
قابل مشاهده کامل: خير, فقط ادراک محلي
قطعی: بله، نتيجه دقيقا
عاملهای منطقی
توصيف جهان WUMPUS
قابل مشاهده کامل: خير, فقط ادراک محلي
قطعی: بله، نتيجه دقيقا
عاملهای منطقی
کاوش در جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن =
عاملهای منطقی
کاوش در جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن =
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
توصيف جهان WUMPUS
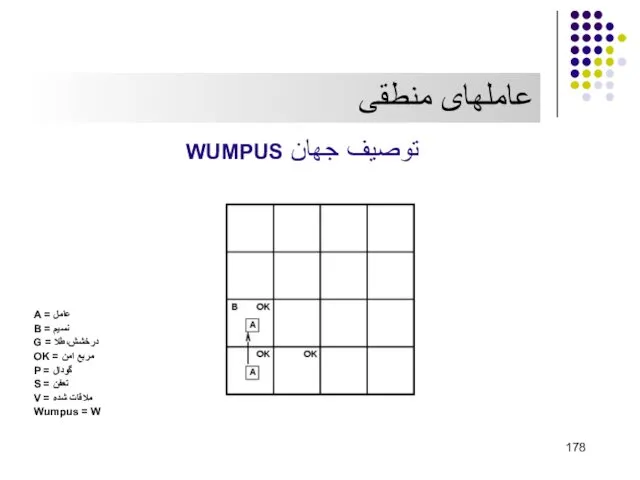
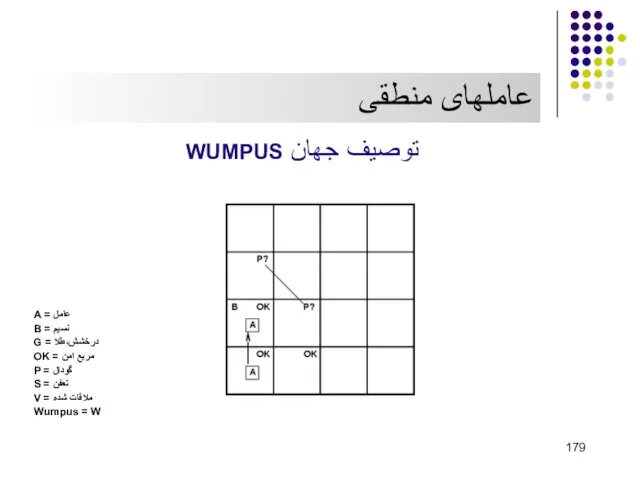
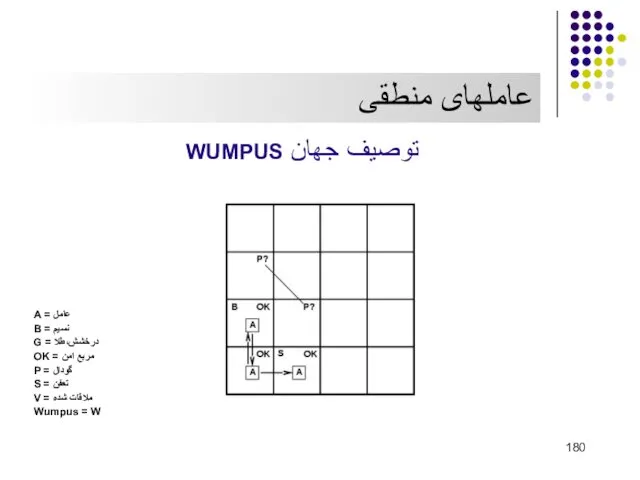
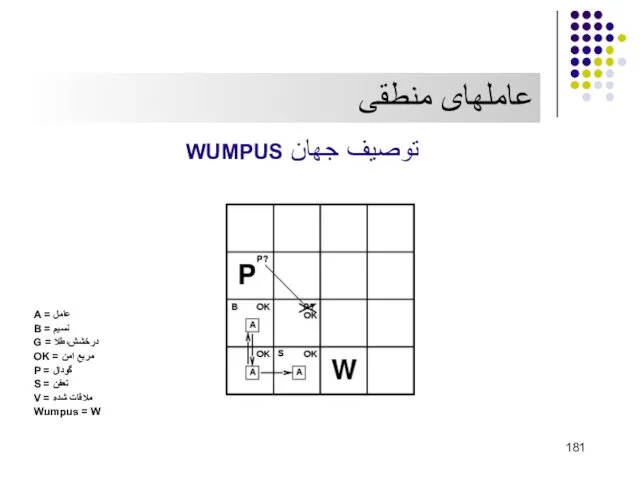
عامل = A
نسيم = B
درخشش،طلا = G
مربع امن = OK
گودال
عاملهای منطقی
منطق
يک زبان رسمي:
ترکيب(نحو): چه کلمه بندی صحيح است.(خوش فرم)
معناشناسی: يک کلمه بندی
عاملهای منطقی
منطق
يک زبان رسمي:
ترکيب(نحو): چه کلمه بندی صحيح است.(خوش فرم)
معناشناسی: يک کلمه بندی
عاملهای منطقی
استلزام
استلزام منطقي بين جملات اين است که جمله ای بطور منطقي از
عاملهای منطقی
استلزام
استلزام منطقي بين جملات اين است که جمله ای بطور منطقي از
عاملهای منطقی
منطق گزاره ای
نحو منطق گزاره ای، جملات مجاز را تعريف ميکند
جملات اتميک(عناصر
عاملهای منطقی
منطق گزاره ای
نحو منطق گزاره ای، جملات مجاز را تعريف ميکند
جملات اتميک(عناصر
عاملهای منطقی
منطق گزاره ای
عاملهای منطقی
منطق گزاره ای
جدول درستی پنج رابطه منطقی
عاملهای منطقی
جدول درستی پنج رابطه منطقی
عاملهای منطقی

منطق گزاره ای در دنيای Wumpus
عاملهای منطقی
در B1,1 نسيمي وجود دارد B1,1 ⬄
منطق گزاره ای در دنيای Wumpus
عاملهای منطقی
در B1,1 نسيمي وجود دارد B1,1 ⬄
عاملهای منطقی
الگوهای استدلال در منطق گزاره ای
قوانين استنتاج: الگوهايي استاندارد که زنجيره ای
عاملهای منطقی
الگوهای استدلال در منطق گزاره ای
قوانين استنتاج: الگوهايي استاندارد که زنجيره ای
عاملهای منطقی
حذف and: هر عطف را ميتوان از ترکيب عطفی استنتاج کرد
مثال: WumpusAlive
عاملهای منطقی
حذف and: هر عطف را ميتوان از ترکيب عطفی استنتاج کرد
مثال: WumpusAlive
هوش مصنوعي
فصل هشتم
منطق رتبه اول
هوش مصنوعي
فصل هشتم
منطق رتبه اول
هوش مصنوعي Artificial Intelligence
فهرست
مروری بر منطق گزاره ای
منطق رتبه اول
انواع منطق
نحو و معنای
هوش مصنوعي Artificial Intelligence
فهرست
مروری بر منطق گزاره ای
منطق رتبه اول
انواع منطق
نحو و معنای
منطق رتبه اول
مروری بر منطق گزاره ای
ويژگيها
ماهيت اعلانی
دانش و استنتاج متمايزند و استنتاج
منطق رتبه اول
مروری بر منطق گزاره ای
ويژگيها
ماهيت اعلانی
دانش و استنتاج متمايزند و استنتاج
منطق رتبه اول
منطق رتبه اول
اساس منطق گزاره ای را پذيرفته و بر اساس
منطق رتبه اول
منطق رتبه اول
اساس منطق گزاره ای را پذيرفته و بر اساس
منطق رتبه اول
انواع منطق
منطق رتبه اول
انواع منطق

منطق رتبه اول
نحو و معنای منطق رتبه اول
نمادهای ثابت؛ اشيا را نشان ميدهد.
منطق رتبه اول
نحو و معنای منطق رتبه اول
نمادهای ثابت؛ اشيا را نشان ميدهد.
منطق رتبه اول
جملات اتميک
هر ترم يک عبارت منطقی است که به شيئ
منطق رتبه اول
جملات اتميک
هر ترم يک عبارت منطقی است که به شيئ
منطق رتبه اول
جملات پيچيده
با ترکيب جملات اتميک و روابط منطقی ميتوان جملات پيچيده
منطق رتبه اول
جملات پيچيده
با ترکيب جملات اتميک و روابط منطقی ميتوان جملات پيچيده
منطق رتبه اول
مثال
مدلی با پنج شیء، دو رابطه دودويي، سه رابطه يکانی و
منطق رتبه اول
مثال
مدلی با پنج شیء، دو رابطه دودويي، سه رابطه يکانی و
منطق رتبه اول
سورها
کمک ميکنند تا به جای شمارش اشيا از طريق نام
منطق رتبه اول
سورها
کمک ميکنند تا به جای شمارش اشيا از طريق نام
منطق رتبه اول
سور عمومی
∀<متغيرها> <جمله>
∀x P که در آن P يک عبارت منطقي
منطق رتبه اول
سور عمومی
∀<متغيرها> <جمله>
∀x P که در آن P يک عبارت منطقي
منطق رتبه اول
سور وجودی
∃ <متغيرها> <جمله>
∃ x P که در آن P يک
منطق رتبه اول
سور وجودی
∃ <متغيرها> <جمله>
∃ x P که در آن P يک
منطق رتبه اول
خصوصيات سورها
⇒ رابط طبيعي برای کار با ∀ و ∧
منطق رتبه اول
خصوصيات سورها
⇒ رابط طبيعي برای کار با ∀ و ∧
منطق رتبه اول
خصوصيات سورها
“هر کسی بستنی را دوست دارد” به معنای اين
منطق رتبه اول
خصوصيات سورها
“هر کسی بستنی را دوست دارد” به معنای اين

منطق رتبه اول
تساوی
با استفاده از = دو ترم به يک شیء اشاره
منطق رتبه اول
تساوی
با استفاده از = دو ترم به يک شیء اشاره
منطق رتبه اول
ادعاها و تقاضاها
جملات از طريق TELL به پايگاه دانش اضافه ميشوند
اين
منطق رتبه اول
ادعاها و تقاضاها
جملات از طريق TELL به پايگاه دانش اضافه ميشوند
اين

منطق رتبه اول
دامنه خويشاوندی
مادر هر فرد والد مؤنث آن فرد است
∀m,c Mother(c) =
منطق رتبه اول
دامنه خويشاوندی
مادر هر فرد والد مؤنث آن فرد است
∀m,c Mother(c) =

منطق رتبه اول
اعداد و مجموعه ها
∀s Set(s) ⇔ (s = {} ) ∨
منطق رتبه اول
اعداد و مجموعه ها
∀s Set(s) ⇔ (s = {} ) ∨
 Математические диктанты. 2 класс
Математические диктанты. 2 класс Память компьютера
Память компьютера Оборотные средства организации
Оборотные средства организации Таблица характеристик модельного ряда телевизоров LG 2017 года
Таблица характеристик модельного ряда телевизоров LG 2017 года Гломерулопатии у детей
Гломерулопатии у детей Доктрина про особистість Ісуса
Доктрина про особистість Ісуса Регуляция иммунных процессов. Темы 9-10
Регуляция иммунных процессов. Темы 9-10 Пластовые газы, конденсаты, газогидраты
Пластовые газы, конденсаты, газогидраты Теории и модели перевода. Лекция 3
Теории и модели перевода. Лекция 3 Шерстяное волокно
Шерстяное волокно How to Write a CV
How to Write a CV Холера. Определение. Характеристика
Холера. Определение. Характеристика Способы размножения растений. Размножение споровых растений
Способы размножения растений. Размножение споровых растений Финансовая грамотность в условиях цифровой экономики (для аудитории 25-35 лет, молодые родители)
Финансовая грамотность в условиях цифровой экономики (для аудитории 25-35 лет, молодые родители) Презентация ГАОУ СПО СО Первоуральский политехникум
Презентация ГАОУ СПО СО Первоуральский политехникум Учимся готовить: десерт Клубничка
Учимся готовить: десерт Клубничка Экстремальные виды спорта
Экстремальные виды спорта Основы и циклы разработки информационных систем
Основы и циклы разработки информационных систем Н.И.Роговцева. Технология. 3 класс. Одежда для карнавала. Бисероплетение.
Н.И.Роговцева. Технология. 3 класс. Одежда для карнавала. Бисероплетение. Наш кабинет - самый лучший кабинет России!
Наш кабинет - самый лучший кабинет России! Аргентина
Аргентина Социально-экономические последствия безработицы и методы её преодоления
Социально-экономические последствия безработицы и методы её преодоления Физиология питания
Физиология питания Аналитико-синтетическая переработка информации (АСПИ). Составление заголовков и библиографических описаний
Аналитико-синтетическая переработка информации (АСПИ). Составление заголовков и библиографических описаний Презентация. Образовательный проект. Использование фольклора в работе с детьми дошкольного возраста
Презентация. Образовательный проект. Использование фольклора в работе с детьми дошкольного возраста Применение методов ТРИЗ в повседневной жизни детского сада
Применение методов ТРИЗ в повседневной жизни детского сада Бұрылма жолдарды қадағалау
Бұрылма жолдарды қадағалау Материалы, применяемые в автомобилестроении и ремонтном производстве. Металлы и сплавы
Материалы, применяемые в автомобилестроении и ремонтном производстве. Металлы и сплавы