- 3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]
![3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]](/images/pdf-document.png)
Содержание
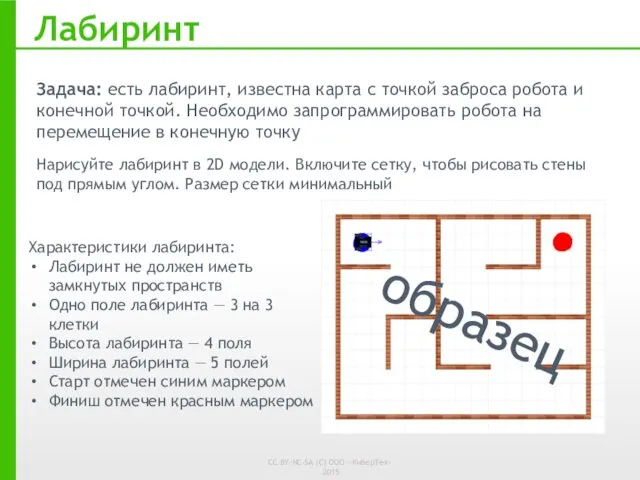
- 2. Лабиринт Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под прямым углом. Размер сетки
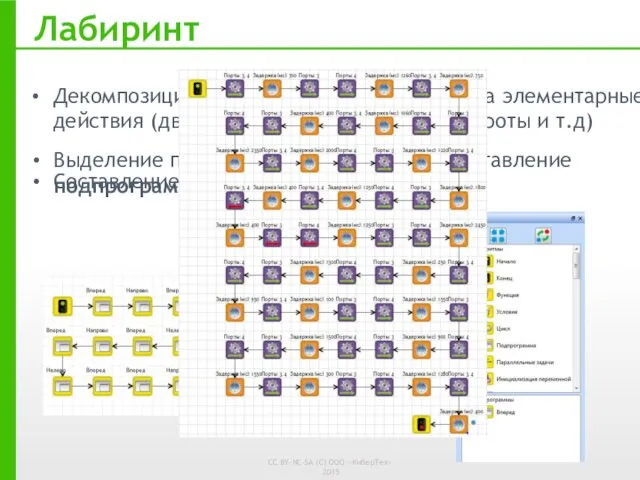
- 3. Лабиринт Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д) Составление программы
- 4. Лабиринт Поле лабиринта в 2D модели 3 на 3 клетки. Составьте алгоритм для движения вперед из
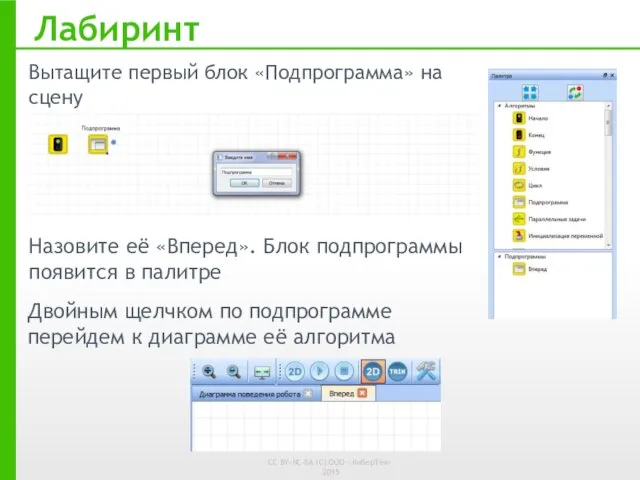
- 5. Лабиринт Вытащите первый блок «Подпрограмма» на сцену Назовите её «Вперед». Блок подпрограммы появится в палитре Двойным
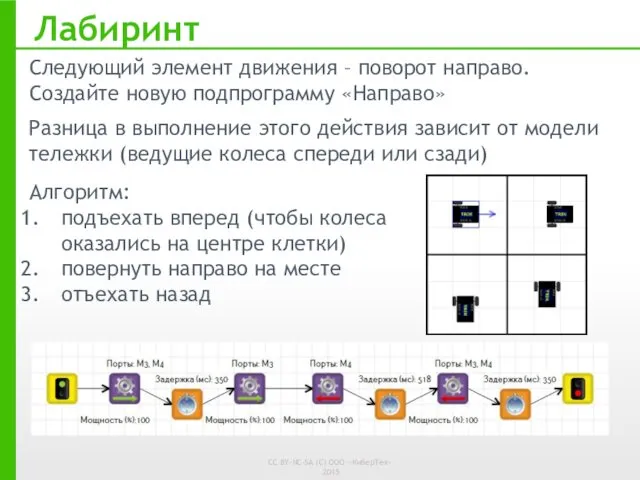
- 6. Лабиринт Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо» Разница в выполнение этого действия
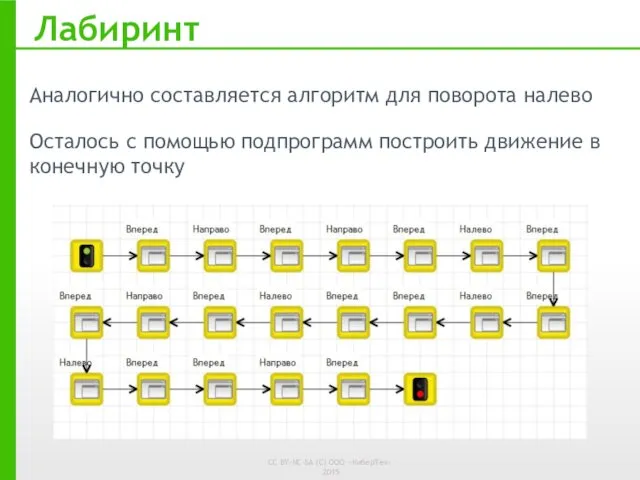
- 7. Лабиринт Аналогично составляется алгоритм для поворота налево Осталось с помощью подпрограмм построить движение в конечную точку
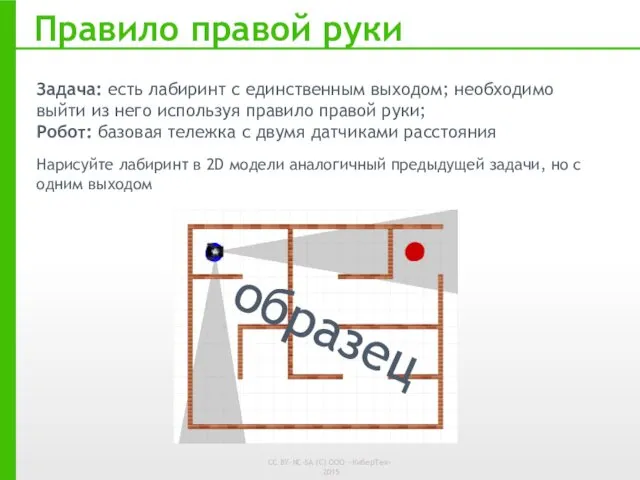
- 8. Правило правой руки Задача: есть лабиринт с единственным выходом; необходимо выйти из него используя правило правой
- 9. Правило правой руки Алгоритм Есть ли справа стена? Повернуть направо Вперед Начало Есть ли впереди стена?
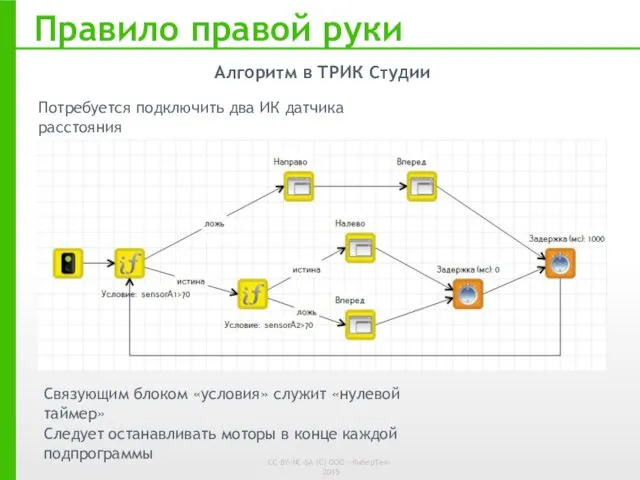
- 10. Правило правой руки Алгоритм в ТРИК Студии Потребуется подключить два ИК датчика расстояния Связующим блоком «условия»
- 12. Скачать презентацию
Лабиринт
Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под
Лабиринт
Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под
Лабиринт
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты
Лабиринт
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты

Лабиринт
Поле лабиринта в 2D модели 3 на 3 клетки.
Составьте алгоритм
Лабиринт
Поле лабиринта в 2D модели 3 на 3 клетки. Составьте алгоритм
Лабиринт
Вытащите первый блок «Подпрограмма» на сцену
Назовите её «Вперед». Блок подпрограммы появится
Лабиринт
Вытащите первый блок «Подпрограмма» на сцену
Назовите её «Вперед». Блок подпрограммы появится
Лабиринт
Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо»
Разница
Лабиринт
Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо»
Разница
Лабиринт
Аналогично составляется алгоритм для поворота налево
Осталось с помощью подпрограмм построить движение
Лабиринт
Аналогично составляется алгоритм для поворота налево
Осталось с помощью подпрограмм построить движение
Правило правой руки
Задача: есть лабиринт с единственным выходом; необходимо выйти из
Правило правой руки
Задача: есть лабиринт с единственным выходом; необходимо выйти из

Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Правило правой руки
Алгоритм в ТРИК Студии
Потребуется подключить два ИК датчика расстояния
Связующим
Правило правой руки
Алгоритм в ТРИК Студии
Потребуется подключить два ИК датчика расстояния
Связующим
 Презентация к проекту Приобщение детей к этнокультурному наследию города Ялуторовска
Презентация к проекту Приобщение детей к этнокультурному наследию города Ялуторовска Правила поведения при террористическом акте
Правила поведения при террористическом акте Психология младшего школьного возраста
Психология младшего школьного возраста Тропы. Лексическая стилистика
Тропы. Лексическая стилистика Электродвижущая сила. Закон Ома для полной цепи
Электродвижущая сила. Закон Ома для полной цепи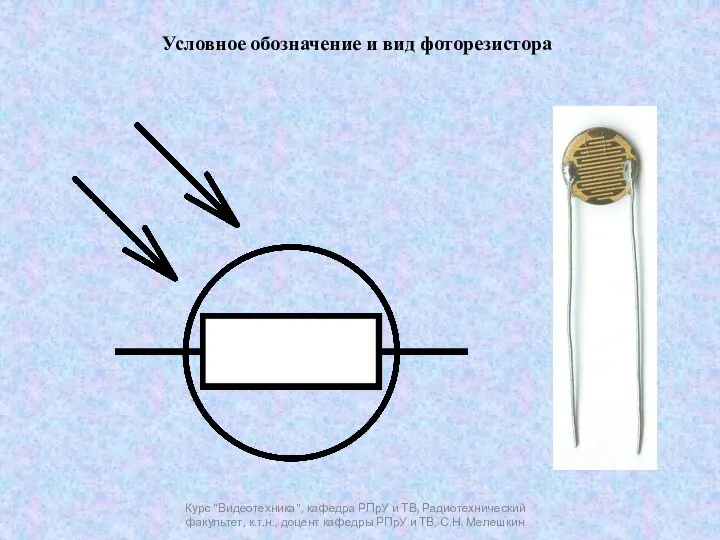 Оптоэлектронные приборы
Оптоэлектронные приборы фотоотчет Адаптация детей первый раз в детский сад
фотоотчет Адаптация детей первый раз в детский сад Домашние животные
Домашние животные Презентация. Пластилин и его свойства.
Презентация. Пластилин и его свойства. Реализация ФГОС. Стандарты второго поколения
Реализация ФГОС. Стандарты второго поколения Проект Здоровей-ка (Фрагменты)
Проект Здоровей-ка (Фрагменты) Безопасные и качественные дороги
Безопасные и качественные дороги Осенний праздник в детском саду. Оформление группы к осеннему празднику
Осенний праздник в детском саду. Оформление группы к осеннему празднику модель успешного ученика
модель успешного ученика Презентация : Основные направления коррекционной работы (ранний возраст)
Презентация : Основные направления коррекционной работы (ранний возраст) Металлические конструкции
Металлические конструкции Респираторно - синцитиальная инфекция
Респираторно - синцитиальная инфекция Проект Зимние забавы
Проект Зимние забавы Новое в перепланировке жилых и нежилых помещений
Новое в перепланировке жилых и нежилых помещений Царицын-Сталинград-Волгоград.
Царицын-Сталинград-Волгоград. Индикация формируемого маршрута. Работа схем в различных режимах
Индикация формируемого маршрута. Работа схем в различных режимах Осложненное простое предложение
Осложненное простое предложение музыка в кино
музыка в кино Современное состояние ЖД инфраструктуры
Современное состояние ЖД инфраструктуры Кинематика робота-манипулятора для сварки трением с перемешиванием
Кинематика робота-манипулятора для сварки трением с перемешиванием Классификация в водной и воздушной среде. Рассев (грохочение) и типы грохотов
Классификация в водной и воздушной среде. Рассев (грохочение) и типы грохотов Проценты каждый день!
Проценты каждый день! презентация к докладу
презентация к докладу