- Кинематика робота-манипулятора для сварки трением с перемешиванием

Содержание
- 2. Робот-манипулятор для сварки трением с перемешиванием
- 3. Схема сварки трением с перемешиванием
- 4. Процесс сварки трением с перемешиванием
- 5. Шов, полученный с помощью сварки трением с перемешиванием
- 6. Элемент конструкции робота, созданный с помощью пакета SolidWorks
- 7. Построение объёмной детали
- 8. Создание отверстий
- 9. Скругление
- 10. 3D-модель второго звена манипулятора
- 11. Создание сборки
- 12. Сопряженные звенья
- 13. Готовая модель исследуемого робота
- 14. Следуя алгоритму Денавита-Хартенберга, введём оси систем координат, связанных со звеньями изучаемого манипулятора
- 15. Работа в программе KIN.c
- 16. Значения координат в сочленениях, полученные программой
- 17. Движение робота-манипулятора
- 18. Заключение 18 1. Реализована 3D-модель робота-манипулятора для сварки трением с перемешиванием. 2. Создана программа KIN.c, при
- 20. Скачать презентацию
Робот-манипулятор для сварки трением с перемешиванием
Робот-манипулятор для сварки трением с перемешиванием
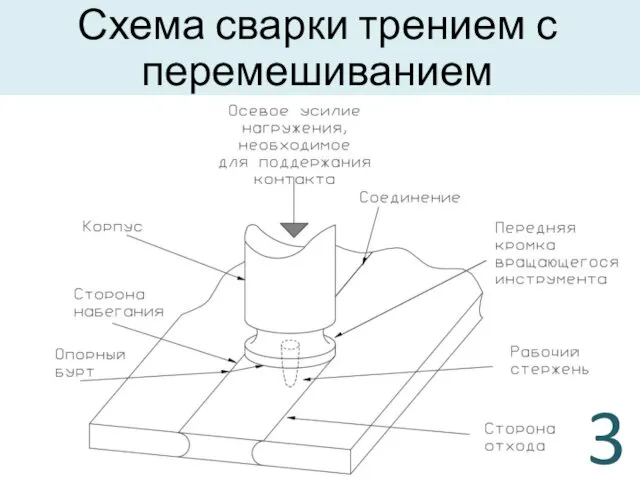
Схема сварки трением с перемешиванием
Схема сварки трением с перемешиванием

Процесс сварки трением с перемешиванием
Процесс сварки трением с перемешиванием
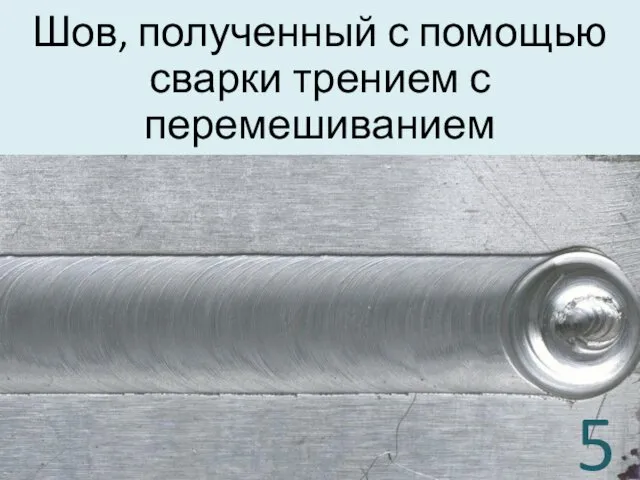
Шов, полученный с помощью сварки трением с перемешиванием
Шов, полученный с помощью сварки трением с перемешиванием
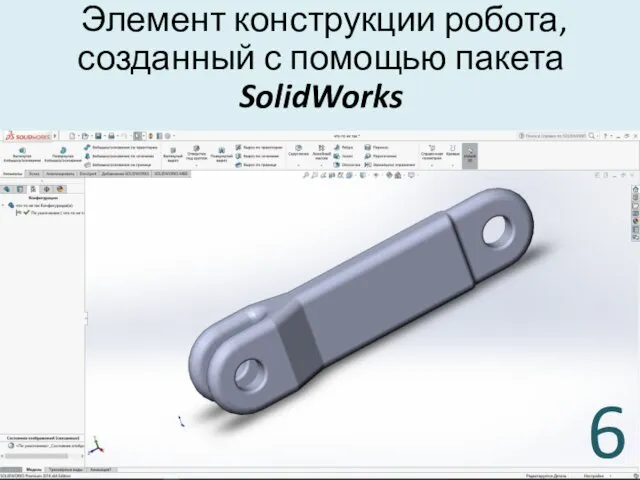
Элемент конструкции робота, созданный с помощью пакета SolidWorks
Элемент конструкции робота, созданный с помощью пакета SolidWorks
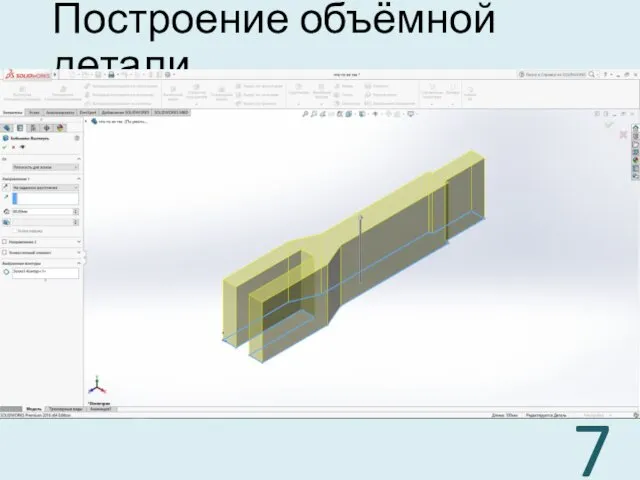
Построение объёмной детали
Построение объёмной детали
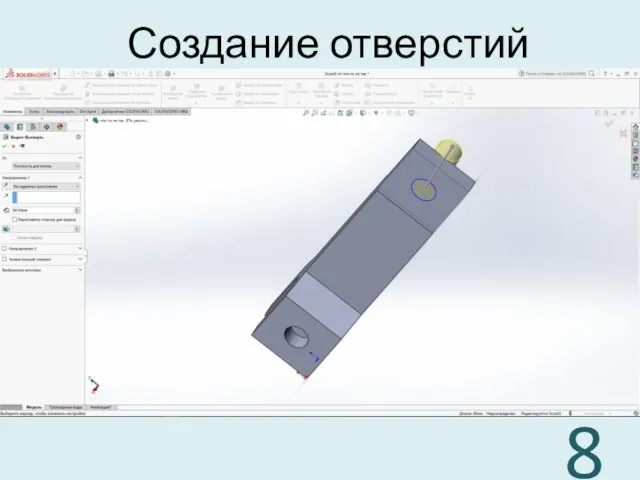
Создание отверстий
Создание отверстий
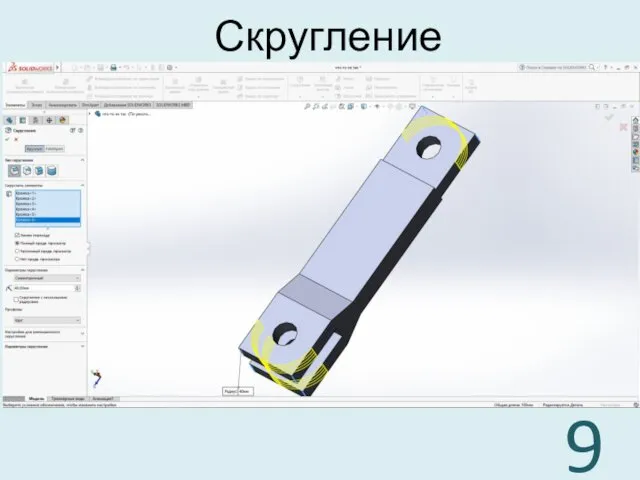
Скругление
Скругление
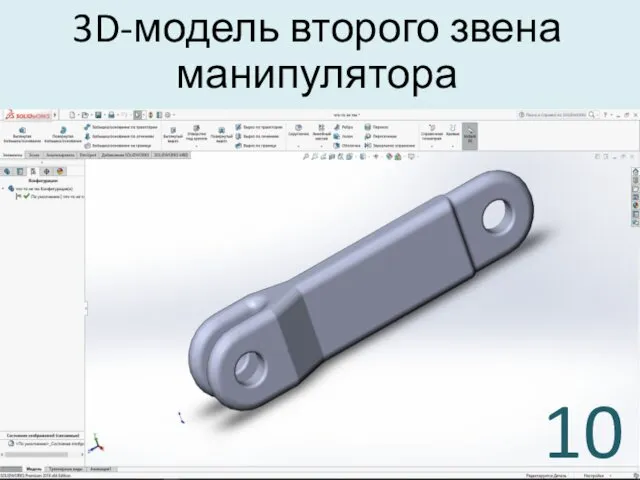
3D-модель второго звена манипулятора
3D-модель второго звена манипулятора
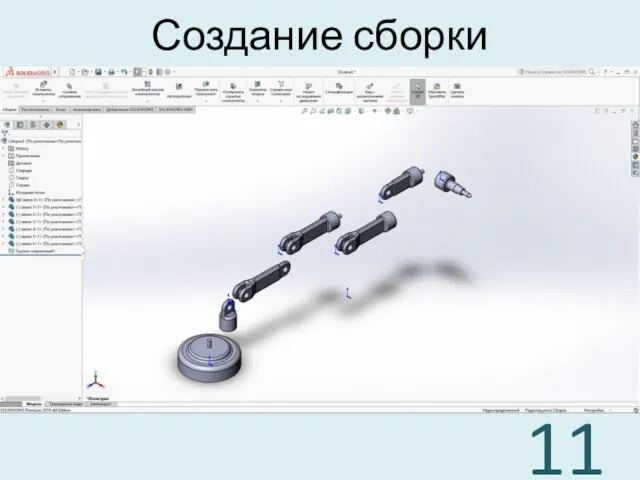
Создание сборки
Создание сборки
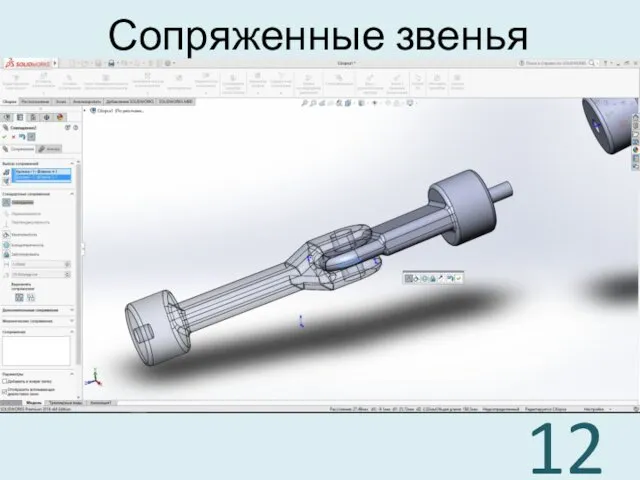
Сопряженные звенья
Сопряженные звенья
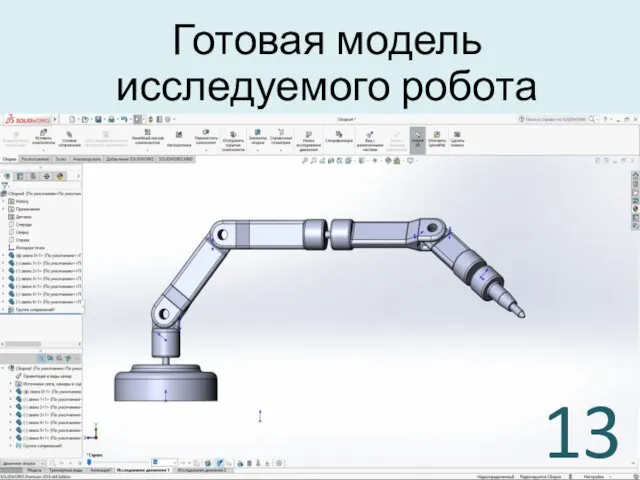
Готовая модель исследуемого робота
Готовая модель исследуемого робота
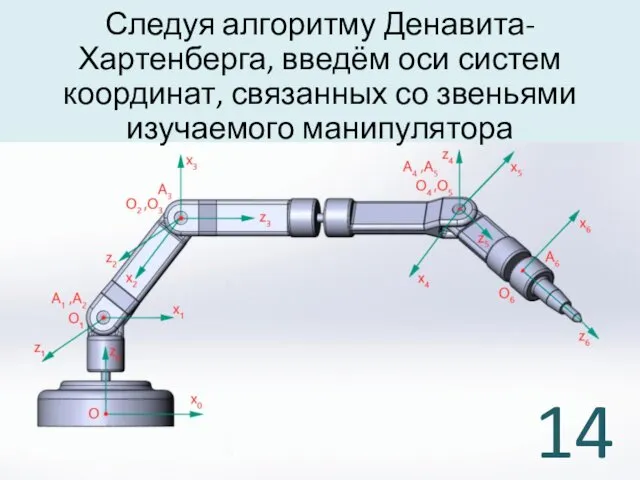
Следуя алгоритму Денавита-Хартенберга, введём оси систем координат, связанных со звеньями изучаемого
Следуя алгоритму Денавита-Хартенберга, введём оси систем координат, связанных со звеньями изучаемого
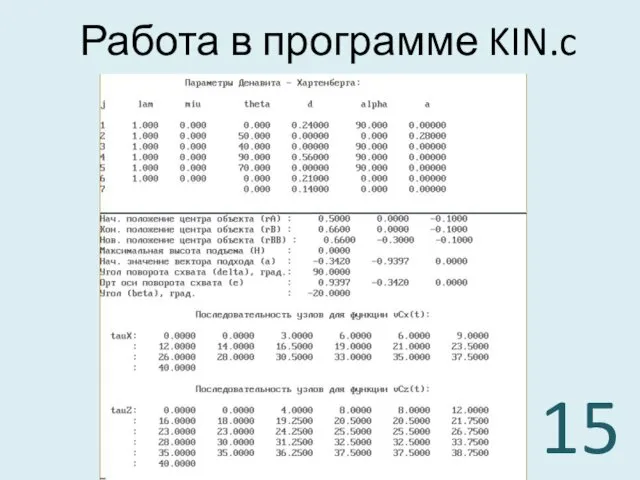
Работа в программе KIN.c
Работа в программе KIN.c
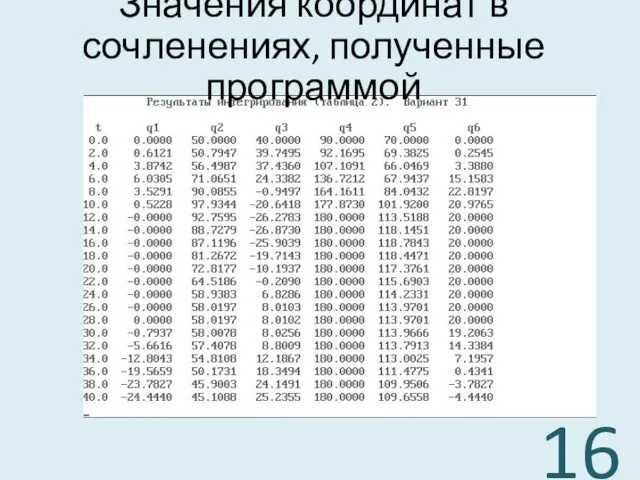
Значения координат в сочленениях, полученные программой
Значения координат в сочленениях, полученные программой

Движение робота-манипулятора
Движение робота-манипулятора
Заключение
18
1. Реализована 3D-модель робота-манипулятора для сварки трением с перемешиванием.
2.
Заключение
18
1. Реализована 3D-модель робота-манипулятора для сварки трением с перемешиванием.
2.
 Методы восстановления деталей
Методы восстановления деталей Русская народная сказка в творчестве художников
Русская народная сказка в творчестве художников Острый и хронический гастриты: факторы риска, клиника, диагностика, профилактика
Острый и хронический гастриты: факторы риска, клиника, диагностика, профилактика Алгоритм написания педагогической характеристики на учащегося
Алгоритм написания педагогической характеристики на учащегося Пр. додел (1)
Пр. додел (1) Калмыцкая национальная одежда
Калмыцкая национальная одежда Проблемы мобильного гейминга и возможные пути их решения
Проблемы мобильного гейминга и возможные пути их решения Презентация к уроку географии В поисках Южной Земли
Презентация к уроку географии В поисках Южной Земли Первая помощь при ранениях
Первая помощь при ранениях Тепловые электрические станции. (Часть 1)
Тепловые электрические станции. (Часть 1) Показательная функция, ее свойства и график
Показательная функция, ее свойства и график Недостаточность кровообращения
Недостаточность кровообращения Сварочное производство
Сварочное производство Первые христиане и их учение
Первые христиане и их учение Атлант-Ю. Бюджетные комплекты техники Tessa
Атлант-Ю. Бюджетные комплекты техники Tessa Конструктивные элементы зданий. (Лекция 5)
Конструктивные элементы зданий. (Лекция 5) Напівпровідниковий діод
Напівпровідниковий діод Друзья
Друзья Принципы обработки информации компьютером
Принципы обработки информации компьютером Основные понятия гидроэнергетики
Основные понятия гидроэнергетики Технологічні особливості утримання та експлуатації об’єктів благоустрою у населених пунктах України
Технологічні особливості утримання та експлуатації об’єктів благоустрою у населених пунктах України Особые случаи морской практики. Снятие судна с мели
Особые случаи морской практики. Снятие судна с мели Почему люди сотрудничают хуже, чем пчелы?
Почему люди сотрудничают хуже, чем пчелы? Модернизация автоматизированной системы управления паровым котлом ДЕ – 25/14 ГМ в котельном цехе
Модернизация автоматизированной системы управления паровым котлом ДЕ – 25/14 ГМ в котельном цехе Святые земли русской
Святые земли русской Наиболее значимые достижения мировой науки
Наиболее значимые достижения мировой науки Мировые воины XX века: причины и последствия
Мировые воины XX века: причины и последствия Госавтоинспекция МВД России
Госавтоинспекция МВД России