- a5bfe67ac6374b949bb7adedd99ca10c

Содержание
- 2. Первый квадрокоптер Г.А.Ботезата (1923)
- 4. Виды квадрокоптеров
- 5. Parrot AR.Drone 2.0
- 6. Квадрокоптер eXplay EXPLORERS INTRUDE
- 7. PL-2500
- 8. Виды беспилотников самолетного типа
- 9. Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK
- 10. БПАК Р-100
- 11. Украинский Р-100
- 12. БПЛА «Застава»
- 13. ZALA AERO 421-08М
- 14. Варианты использования дронов И много других сфер использования…
- 15. Спасательные работы
- 21. Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия между роботами. Разработан трехкилограммовый робот-разведчик
- 22. БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом преимуществ, таких как: надежность и
- 23. Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес каждого винтика), жесткой (чтобы выдерживать
- 24. Пульт дистанционного управления
- 25. DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми возможностями проведения продвинутых полетов и
- 26. DJI Phantom 3 Advanced
- 28. Скачать презентацию

Первый квадрокоптер Г.А.Ботезата (1923)
Первый квадрокоптер Г.А.Ботезата (1923)

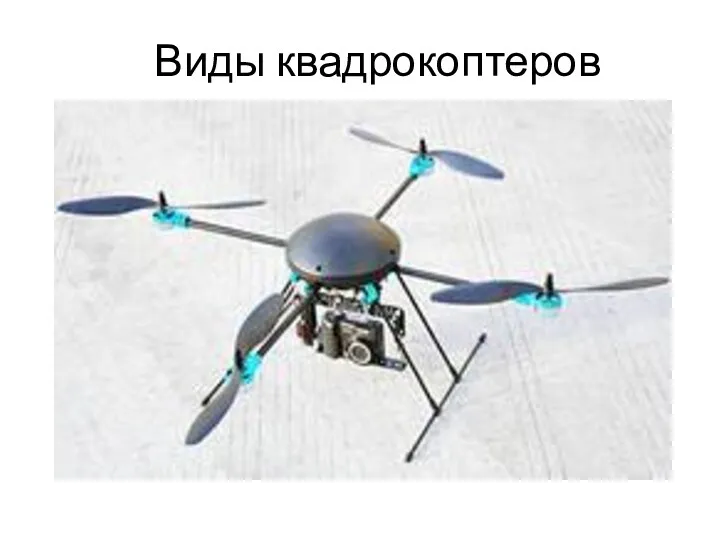
Виды квадрокоптеров
Виды квадрокоптеров

Parrot AR.Drone 2.0
Parrot AR.Drone 2.0

Квадрокоптер eXplay
EXPLORERS INTRUDE
Квадрокоптер eXplay
EXPLORERS INTRUDE

PL-2500
PL-2500

Виды беспилотников
самолетного типа
Виды беспилотников
самолетного типа

Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK
Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK

БПАК Р-100
БПАК Р-100

Украинский Р-100
Украинский Р-100
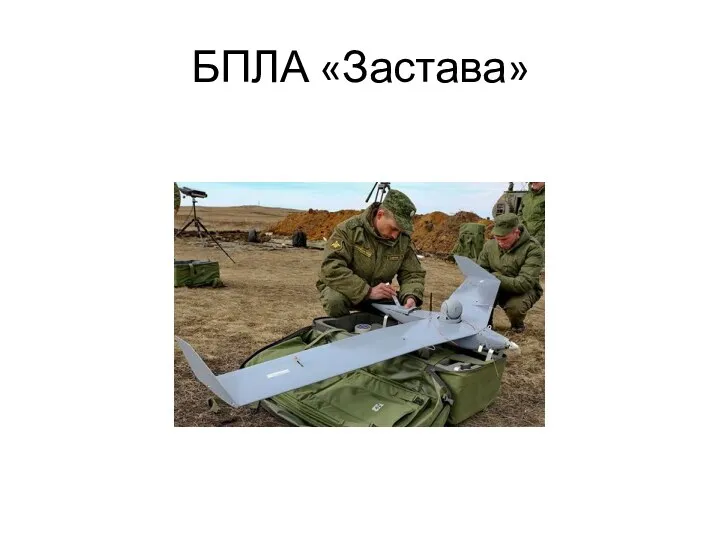
БПЛА «Застава»
БПЛА «Застава»

ZALA AERO 421-08М
ZALA AERO 421-08М
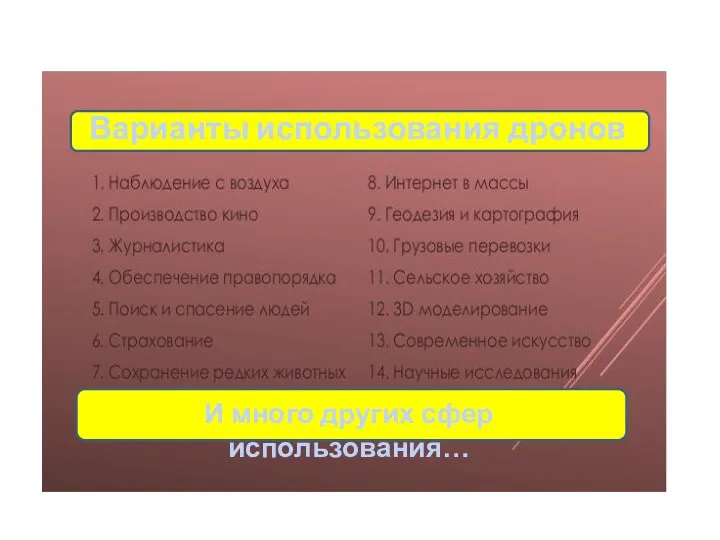
Варианты использования дронов
И много других сфер использования…
Варианты использования дронов
И много других сфер использования…

Спасательные работы
Спасательные работы



Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия
Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия
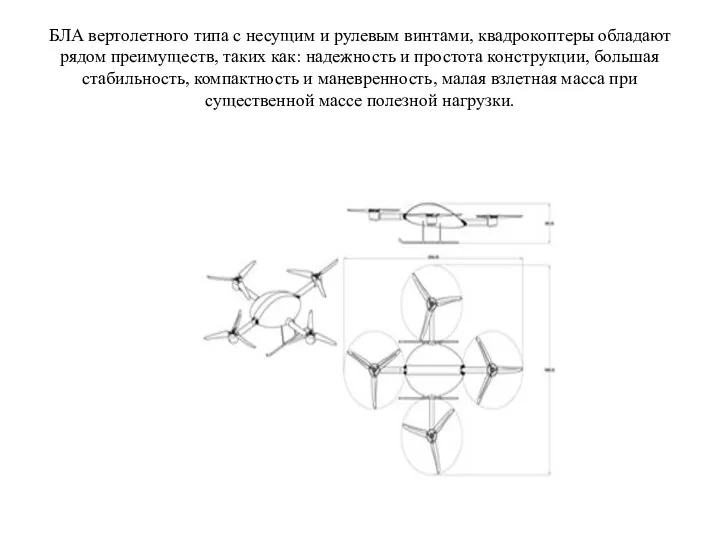
БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом
БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом

Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес
Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес

Пульт дистанционного управления
Пульт дистанционного управления
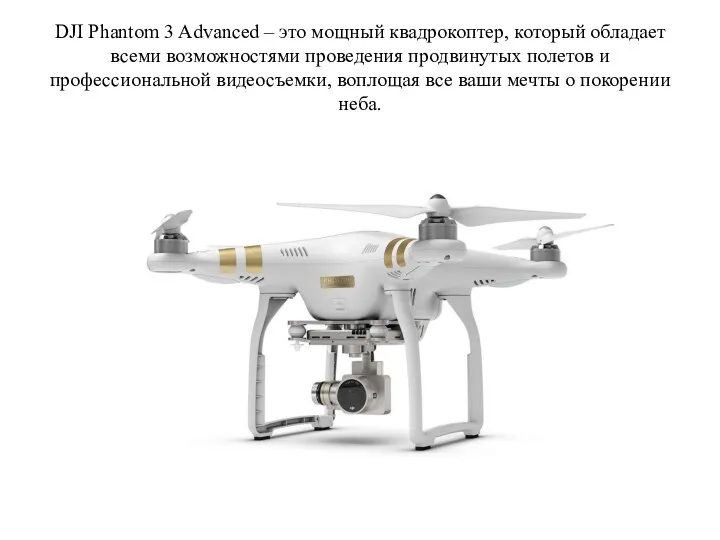
DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми
DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми

DJI Phantom 3 Advanced
DJI Phantom 3 Advanced
 Праздники народов России. 4 класс
Праздники народов России. 4 класс Александр Александрович Фадеев 1901 - 1956
Александр Александрович Фадеев 1901 - 1956 Школьный этикет. Правила поведения на уроке.
Школьный этикет. Правила поведения на уроке. Рождественская звезда . Рождение Иисуса
Рождественская звезда . Рождение Иисуса TCU (traffic control unit)
TCU (traffic control unit) Именные химические реакции в органической химии
Именные химические реакции в органической химии Применение материалов в кабельных изделиях
Применение материалов в кабельных изделиях Ярослав Гашек Камень жизни
Ярослав Гашек Камень жизни Научные принципы, параметры технологии и технологическое оборудование для прямой переработки кусковой сидеритовой руды в сталь
Научные принципы, параметры технологии и технологическое оборудование для прямой переработки кусковой сидеритовой руды в сталь Лексикалық қосымшалар тәсілі. Екінші тілдің тепе-тең бірліктерін іріктеп алу дағдысы
Лексикалық қосымшалар тәсілі. Екінші тілдің тепе-тең бірліктерін іріктеп алу дағдысы Экономика и экология
Экономика и экология Презентация Игровые технологии в детском саду Игровые технологии в ДОУ
Презентация Игровые технологии в детском саду Игровые технологии в ДОУ Кадры предприятия. (Тема 9)
Кадры предприятия. (Тема 9) Моральное стимулирование труда персонала
Моральное стимулирование труда персонала 20190306_larina_n.p
20190306_larina_n.p Характеристика элементов III A группы. Бор и алюминий
Характеристика элементов III A группы. Бор и алюминий Использование информационно-коммуникационной технологии Игры для Тигры для коррекции общего недоразвития речи в дошкольном возрасте.
Использование информационно-коммуникационной технологии Игры для Тигры для коррекции общего недоразвития речи в дошкольном возрасте. Данные в экономике, их визуализация и предварительная обработка. Визуализация качественных признаков в Microsoft Excel
Данные в экономике, их визуализация и предварительная обработка. Визуализация качественных признаков в Microsoft Excel Бихевиоризм
Бихевиоризм Презентация по ПДД
Презентация по ПДД Пробный ЕГЭ. Вариант 1
Пробный ЕГЭ. Вариант 1 Нуклеиновые кислоты
Нуклеиновые кислоты Презентация по химии Спирты 10 класс
Презентация по химии Спирты 10 класс Секреты ораторского искусства
Секреты ораторского искусства Оперативное управление коммутационными аппаратами
Оперативное управление коммутационными аппаратами Готов ли Ваш ребенок к школе?
Готов ли Ваш ребенок к школе? Внеурочная деятельность в младшей школе как важное условие реализации деятельности ФГОС нового поколения
Внеурочная деятельность в младшей школе как важное условие реализации деятельности ФГОС нового поколения  Расставание с прошлым, дорога в светлое будущее
Расставание с прошлым, дорога в светлое будущее