- Акселерометры, их типы и характеристики

Содержание
- 2. Акселерометры, их типы и характеристики Цель лекции: Ознакомление с датчиками линейного ускорения: их типами и характеристиками
- 3. Определение и типы Акселерометр - датчик линейного ускорения, в этом качестве широко используется для измерения углов
- 4. Сравнительные характеристики акселерометров
- 5. Пленочные пьезоэлектрические акселерометры Пленочные пьезоэлектрические датчики ускорения выполняются на основе многослойной пьезоэлектрической полимерной пленки. Многослойная пленка
- 6. Пленочные пьезоэлектрические акселерометры Чувствительный элемент датчика обладает чрезвычайно высоким выходным сопротивлением, поэтому на подложке датчика имеется
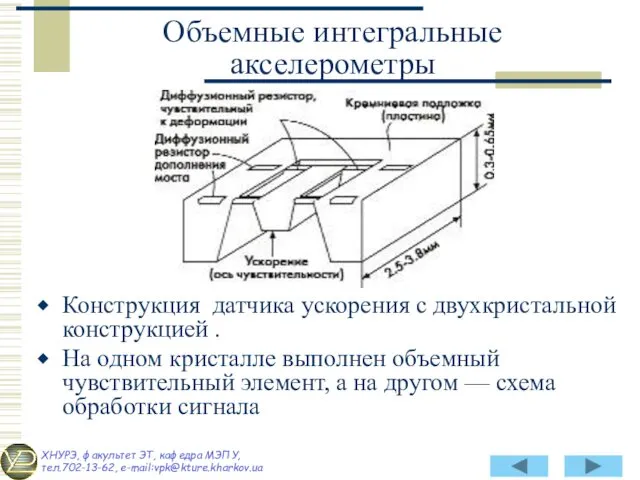
- 7. Объемные интегральные акселерометры Конструкция датчика ускорения с двухкристальной конструкцией . На одном кристалле выполнен объемный чувствительный
- 8. Объемные интегральные акселерометры Недостатки Сложность производства(операции формирования объемных структур не очень просто совмещаются со стандартными поверхностными
- 9. Поверхностные интегральные акселерометры Основной конструктивный блок элементарной ячейки датчика ускорения Фактически датчик имеет 54 элементарных ячейки
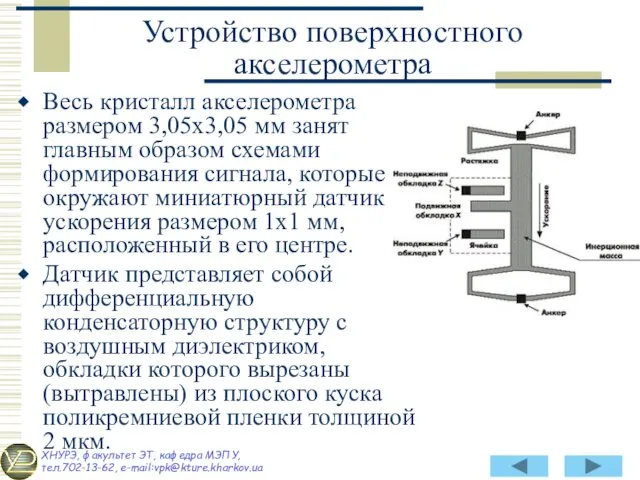
- 10. Устройство поверхностного акселерометра Весь кристалл акселерометра размером 3,05х3,05 мм занят главным образом схемами формирования сигнала, которые
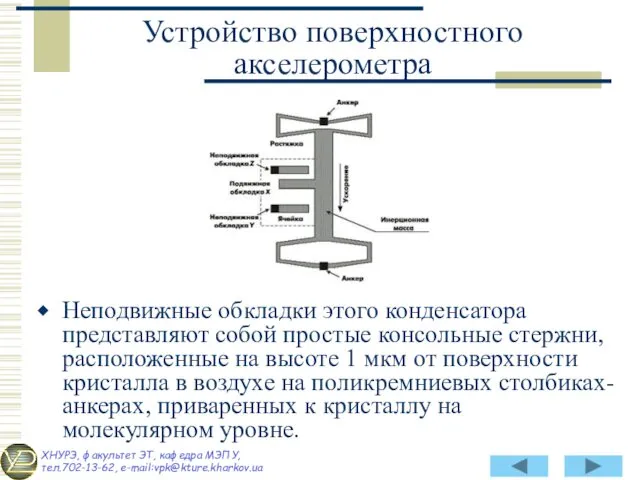
- 11. Устройство поверхностного акселерометра Неподвижные обкладки этого конденсатора представляют собой простые консольные стержни, расположенные на высоте 1
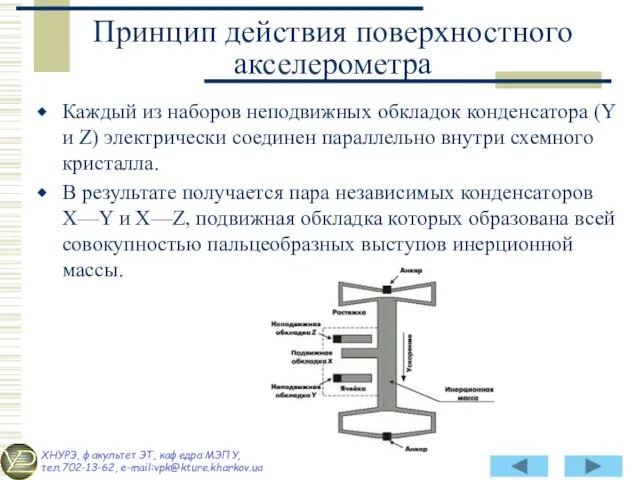
- 12. Принцип действия поверхностного акселерометра Каждый из наборов неподвижных обкладок конденсатора (Y и Z) электрически соединен параллельно
- 13. Принцип действия поверхностного акселерометра Внутри кристалла эти три обкладки подключены ко встроенным схемам формирования сигнала акселерометра.
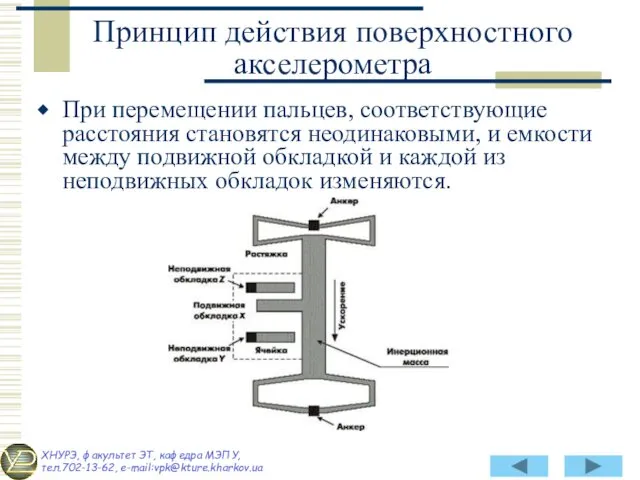
- 14. Принцип действия поверхностного акселерометра При перемещении пальцев, соответствующие расстояния становятся неодинаковыми, и емкости между подвижной обкладкой
- 15. Принцип действия поверхностного акселерометра Противофазные сигналы прямоугольной формы частотой 1 МГц одинаковой амплитуды подаются от генератора
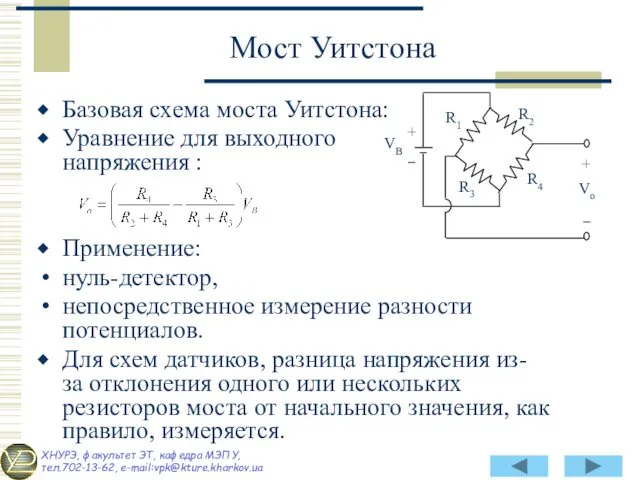
- 16. Мост Уитстона Базовая схема моста Уитстона: Уравнение для выходного напряжения : Применение: нуль-детектор, непосредственное измерение разности
- 17. Структурная схема ИМС акселерометра
- 18. Фазочувствительный демодулятор При ускорении датчика разностный сигнал не равен нулю, причем его амплитуда зависит от величины
- 19. Система самотестирования Акселерометры семейства также снабжены системой самотестирования. Тестовый сигнал в виде последовательности прямоугольных импульсов низкой
- 20. Точность интегральных акселерометров Точность преобразования ускорения в электрический сигнал акселерометрами так же, как и точность датчиков
- 21. Точность интегральных акселерометров Смещение нуля и чувствительность акселерометров при нормальных условиях корректируются при изготовлении. Остаточная погрешность
- 22. Точность интегральных акселерометров Преимущества использования вибростенда: возможность калибровки, в том числе и датчиков, восприимчивых только к
- 23. Точность интегральных акселерометров Преимущества применения силы тяжести для калибровки: не требуется дорогостоящее оборудование; метод мало чувствителен
- 24. Поперечная чувствительность Поперечная чувствительность характеризует способность датчика преобразовывать в электрический сигнал ускорение, направленное под углом 90°
- 25. Шум акселерометров Шум, содержащийся в выходном сигнале акселерометра, определяет разрешающую способность устройства, важную при определении малых
- 27. Скачать презентацию
Акселерометры, их типы и характеристики
Цель лекции: Ознакомление с датчиками линейного ускорения:
Акселерометры, их типы и характеристики
Цель лекции: Ознакомление с датчиками линейного ускорения:
Определение и типы
Акселерометр - датчик линейного ускорения, в этом качестве
Определение и типы
Акселерометр - датчик линейного ускорения, в этом качестве

Сравнительные характеристики акселерометров
Сравнительные характеристики акселерометров
Пленочные пьезоэлектрические акселерометры
Пленочные пьезоэлектрические датчики ускорения выполняются на основе многослойной пьезоэлектрической
Пленочные пьезоэлектрические акселерометры
Пленочные пьезоэлектрические датчики ускорения выполняются на основе многослойной пьезоэлектрической
Пленочные пьезоэлектрические
акселерометры
Чувствительный элемент датчика обладает чрезвычайно высоким выходным сопротивлением, поэтому
Пленочные пьезоэлектрические
акселерометры
Чувствительный элемент датчика обладает чрезвычайно высоким выходным сопротивлением, поэтому
Объемные интегральные акселерометры
Конструкция датчика ускорения с двухкристальной конструкцией .
На одном кристалле
Объемные интегральные акселерометры
Конструкция датчика ускорения с двухкристальной конструкцией .
На одном кристалле
Объемные интегральные акселерометры
Недостатки
Сложность производства(операции формирования объемных структур не очень просто совмещаются
Объемные интегральные акселерометры
Недостатки
Сложность производства(операции формирования объемных структур не очень просто совмещаются

Поверхностные интегральные акселерометры
Основной конструктивный блок элементарной ячейки датчика ускорения
Фактически датчик имеет
Поверхностные интегральные акселерометры
Основной конструктивный блок элементарной ячейки датчика ускорения
Фактически датчик имеет
Устройство поверхностного акселерометра
Весь кристалл акселерометра размером 3,05х3,05 мм занят главным образом
Устройство поверхностного акселерометра
Весь кристалл акселерометра размером 3,05х3,05 мм занят главным образом
Устройство поверхностного акселерометра
Неподвижные обкладки этого конденсатора представляют собой простые консольные стержни,
Устройство поверхностного акселерометра
Неподвижные обкладки этого конденсатора представляют собой простые консольные стержни,
Принцип действия поверхностного акселерометра
Каждый из наборов неподвижных обкладок конденсатора (Y
Принцип действия поверхностного акселерометра
Каждый из наборов неподвижных обкладок конденсатора (Y
Принцип действия поверхностного акселерометра
Внутри кристалла эти три обкладки подключены ко встроенным
Принцип действия поверхностного акселерометра
Внутри кристалла эти три обкладки подключены ко встроенным
Принцип действия поверхностного акселерометра
При перемещении пальцев, соответствующие расстояния становятся неодинаковыми, и
Принцип действия поверхностного акселерометра
При перемещении пальцев, соответствующие расстояния становятся неодинаковыми, и
Принцип действия поверхностного акселерометра
Противофазные сигналы прямоугольной формы частотой 1 МГц одинаковой
Принцип действия поверхностного акселерометра
Противофазные сигналы прямоугольной формы частотой 1 МГц одинаковой
Мост Уитстона
Базовая схема моста Уитстона:
Уравнение для выходного напряжения :
Применение:
нуль-детектор,
непосредственное измерение разности
Мост Уитстона
Базовая схема моста Уитстона:
Уравнение для выходного напряжения :
Применение:
нуль-детектор,
непосредственное измерение разности
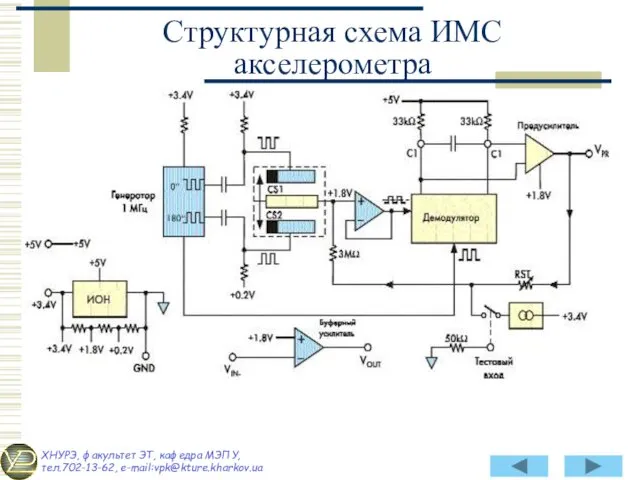
Структурная схема ИМС акселерометра
Структурная схема ИМС акселерометра
Фазочувствительный демодулятор
При ускорении датчика разностный сигнал не равен нулю, причем его
Фазочувствительный демодулятор
При ускорении датчика разностный сигнал не равен нулю, причем его
Система самотестирования
Акселерометры семейства также снабжены системой самотестирования. Тестовый сигнал в виде
Система самотестирования
Акселерометры семейства также снабжены системой самотестирования. Тестовый сигнал в виде
Точность интегральных акселерометров
Точность преобразования ускорения в электрический сигнал акселерометрами так же,
Точность интегральных акселерометров
Точность преобразования ускорения в электрический сигнал акселерометрами так же,
Точность интегральных акселерометров
Смещение нуля и чувствительность акселерометров при нормальных условиях корректируются
Точность интегральных акселерометров
Смещение нуля и чувствительность акселерометров при нормальных условиях корректируются
Точность интегральных акселерометров
Преимущества использования вибростенда:
возможность калибровки, в том числе и датчиков,
Точность интегральных акселерометров
Преимущества использования вибростенда:
возможность калибровки, в том числе и датчиков,
Точность интегральных акселерометров
Преимущества применения силы тяжести для калибровки:
не требуется дорогостоящее оборудование;
Точность интегральных акселерометров
Преимущества применения силы тяжести для калибровки:
не требуется дорогостоящее оборудование;
Поперечная чувствительность
Поперечная чувствительность характеризует способность датчика преобразовывать в электрический сигнал ускорение,
Поперечная чувствительность
Поперечная чувствительность характеризует способность датчика преобразовывать в электрический сигнал ускорение,
Шум акселерометров
Шум, содержащийся в выходном сигнале акселерометра, определяет разрешающую способность устройства,
Шум акселерометров
Шум, содержащийся в выходном сигнале акселерометра, определяет разрешающую способность устройства,
 Маркировка чугуна
Маркировка чугуна Презентация ЦИПР
Презентация ЦИПР Презентация аналитического отчета за 2014-2015 год
Презентация аналитического отчета за 2014-2015 год Электрическое сопротивление проводника. Удельное сопротивление
Электрическое сопротивление проводника. Удельное сопротивление научно-практическая конференция
научно-практическая конференция презентация Возникновение жизни (4)
презентация Возникновение жизни (4) Вирусы
Вирусы Аутсорсинг
Аутсорсинг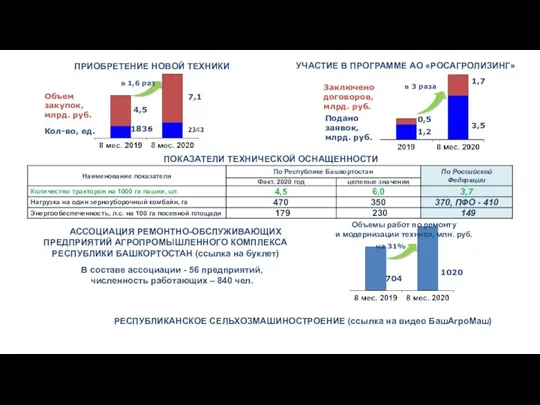 Программа АО Росагролизинг. Приобретение новой техники
Программа АО Росагролизинг. Приобретение новой техники Презентация к уроку Страны мира 7 класс
Презентация к уроку Страны мира 7 класс Жер бедері
Жер бедері Оригами. Проект
Оригами. Проект Снеговик. Новогодняя поделка
Снеговик. Новогодняя поделка 9 мая - День Победы. Презентация к лассному часу
9 мая - День Победы. Презентация к лассному часу Изобразительное искусство России начала XX века
Изобразительное искусство России начала XX века Коллективный проект, технология, 3 класс, Подарок ветерану
Коллективный проект, технология, 3 класс, Подарок ветерану Презентация по методической теме: Балаларда туган җиребезгә мәхәббәт, аның табигатенә карата сакчыл караш тәрбияләү һәм экологик тәрбия бирү 2011-2015 год
Презентация по методической теме: Балаларда туган җиребезгә мәхәббәт, аның табигатенә карата сакчыл караш тәрбияләү һәм экологик тәрбия бирү 2011-2015 год Перпендикуляр и наклонная
Перпендикуляр и наклонная Презентация Школа сегодня и вчера
Презентация Школа сегодня и вчера Рахіт. Етіологія, патогенез, клініка, діагностика, лікування, профілактика
Рахіт. Етіологія, патогенез, клініка, діагностика, лікування, профілактика Автоматизированное рабочее место врача-терапевта (АРМ)
Автоматизированное рабочее место врача-терапевта (АРМ) Фронтальные одноковшовые погрузчики
Фронтальные одноковшовые погрузчики Дозирующие устройства жидкости
Дозирующие устройства жидкости Системы впрыска бензина
Системы впрыска бензина Dark wash-Finish
Dark wash-Finish Градусная сетка. Географические координаты
Градусная сетка. Географические координаты Экскурсия
Экскурсия Расчет радиовещательного приемника высшего класса
Расчет радиовещательного приемника высшего класса