- Аналитическая механика

Содержание
- 2. Содержание Лекция 7. Аналитическая механика. Обобщенные координаты. Уравнения связей. Возможные перемещения. Идеальные связи. Принцип возможных перемещений.
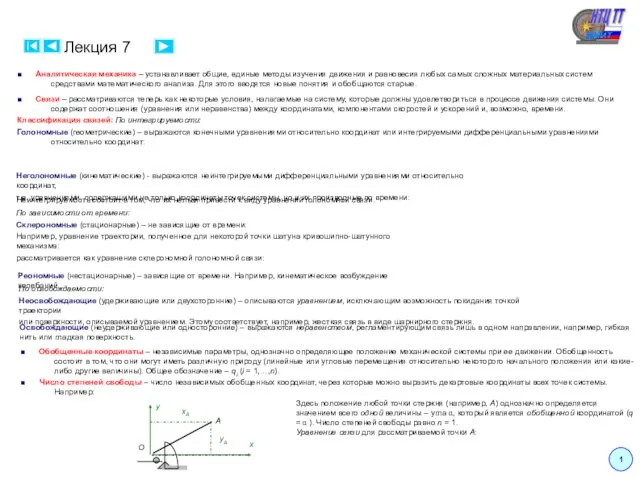
- 3. 1 Лекция 7 ■ Аналитическая механика – устанавливает общие, единые методы изучения движения и равновесия любых
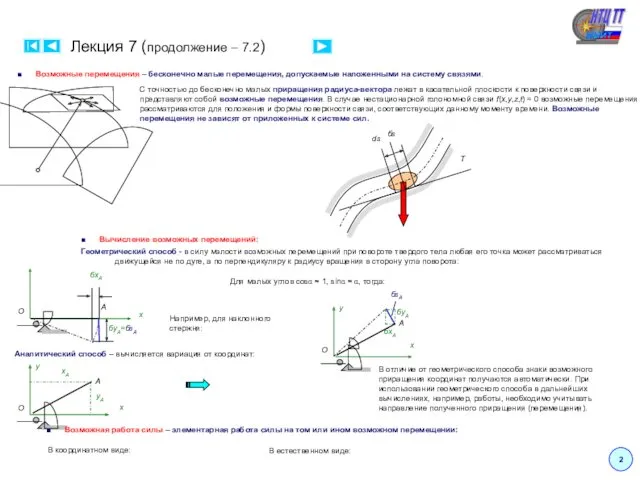
- 4. Лекция 7 (продолжение – 7.2) ■ Возможные перемещения – бесконечно малые перемещения, допускаемые наложенными на систему
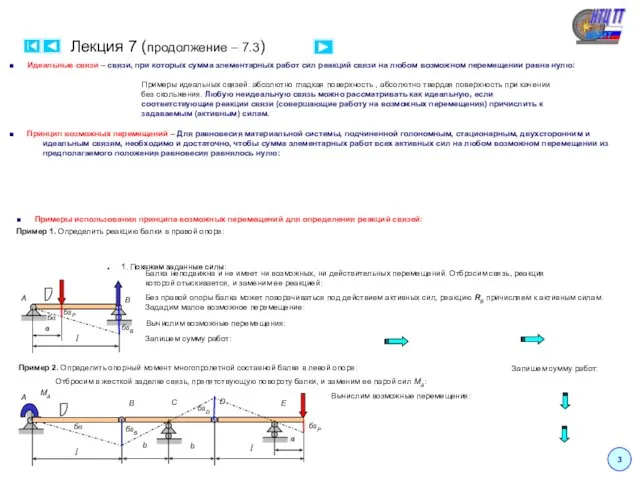
- 5. Лекция 7 (продолжение – 7.3) 3 ■ Примеры использования принципа возможных перемещений для определения реакций связей:
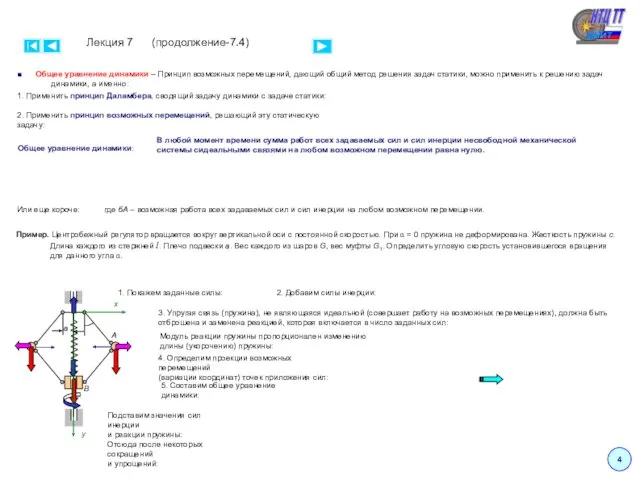
- 6. 4 Лекция 7 (продолжение-7.4) ■ Общее уравнение динамики – Принцип возможных перемещений, дающий общий метод решения
- 8. Скачать презентацию
Содержание
Лекция 7. Аналитическая механика. Обобщенные координаты. Уравнения связей. Возможные перемещения.
Содержание
Лекция 7. Аналитическая механика. Обобщенные координаты. Уравнения связей. Возможные перемещения.
1
Лекция 7
■ Аналитическая механика – устанавливает общие, единые методы изучения движения
1
Лекция 7
■ Аналитическая механика – устанавливает общие, единые методы изучения движения
Лекция 7 (продолжение – 7.2)
■ Возможные перемещения – бесконечно малые перемещения,
Лекция 7 (продолжение – 7.2)
■ Возможные перемещения – бесконечно малые перемещения,
Лекция 7 (продолжение – 7.3)
3
■ Примеры использования принципа возможных перемещений для
Лекция 7 (продолжение – 7.3)
3
■ Примеры использования принципа возможных перемещений для
4
Лекция 7 (продолжение-7.4)
■ Общее уравнение динамики – Принцип возможных перемещений, дающий
4
Лекция 7 (продолжение-7.4)
■ Общее уравнение динамики – Принцип возможных перемещений, дающий
 Основные принципы, правила и методы конструирования деталей и функциональных устройств ОЭП
Основные принципы, правила и методы конструирования деталей и функциональных устройств ОЭП Презентация модельная методика по здоровьесбережению Курить-здоровью вредить
Презентация модельная методика по здоровьесбережению Курить-здоровью вредить Первичное вскрытие продуктивного пласта
Первичное вскрытие продуктивного пласта Безопасное использование ядерной энергии
Безопасное использование ядерной энергии Презентация по татарскому языку 2 класс. Тема Шәхси гигиена.
Презентация по татарскому языку 2 класс. Тема Шәхси гигиена. Загальні відомості, будова та принцип роботи систем та пристроїв радіолокаційних станцій (РЛС). Радіоприймальні пристрої ЗРЛ
Загальні відомості, будова та принцип роботи систем та пристроїв радіолокаційних станцій (РЛС). Радіоприймальні пристрої ЗРЛ Предприятие. Типы предприятий
Предприятие. Типы предприятий Мы помним, мы гордимся
Мы помним, мы гордимся Методы монтажа конструкций зданий и сооружений
Методы монтажа конструкций зданий и сооружений Цирроз печени
Цирроз печени 2.6 (+) Ленточные полотна
2.6 (+) Ленточные полотна Проблемы развития воображения педагогов в процессе профессиональной деятельности
Проблемы развития воображения педагогов в процессе профессиональной деятельности Российская компания Art Lumiere. Производство и реализация декоративных элементов из гипсокартона KNAUF
Российская компания Art Lumiere. Производство и реализация декоративных элементов из гипсокартона KNAUF Анализ причин аварий строительных конструкций. Реконструкция. Лекция 1
Анализ причин аварий строительных конструкций. Реконструкция. Лекция 1 Логоуголок в группе Центр Речевичок
Логоуголок в группе Центр Речевичок Энергоактивные здания с использованием солнечной энергии
Энергоактивные здания с использованием солнечной энергии Автогрейдер - машина на колёсах, используемая для выравнивания и перемещения грунта
Автогрейдер - машина на колёсах, используемая для выравнивания и перемещения грунта Расчет водоснабжения строительной площадки
Расчет водоснабжения строительной площадки Славься, Россия, героями спорта! (презентация)
Славься, Россия, героями спорта! (презентация) Сельское хозяйство Иркутской области
Сельское хозяйство Иркутской области Наследие священноисповедника Сильвестра Омского
Наследие священноисповедника Сильвестра Омского Африканың өзендері мен көлдері
Африканың өзендері мен көлдері Хозяйство Германии
Хозяйство Германии Арифметическая прогрессия. Тест
Арифметическая прогрессия. Тест Предельные углеводороды. Химические свойства. 10 класс
Предельные углеводороды. Химические свойства. 10 класс Культура России в середине и во второй половине XVIII века
Культура России в середине и во второй половине XVIII века Защитный крем для лица Antipollution
Защитный крем для лица Antipollution Технические средства нанотехнологий. Диагностика и методы исследования нанообъектов и наносистем
Технические средства нанотехнологий. Диагностика и методы исследования нанообъектов и наносистем