- Асинхронные двигатели

Содержание
- 4. Назначение и области применения асинхронных двигателей Основное применение асинхронные машины находят в качестве двигателей. Асинхронные двигатели
- 5. АД с короткозамкнутым ротором АД с фазным ротором
- 6. Наряду с преимуществами АД имеют ряд недостатков, основными из которых являются: - низкий коэффициент мощности (соsφ)
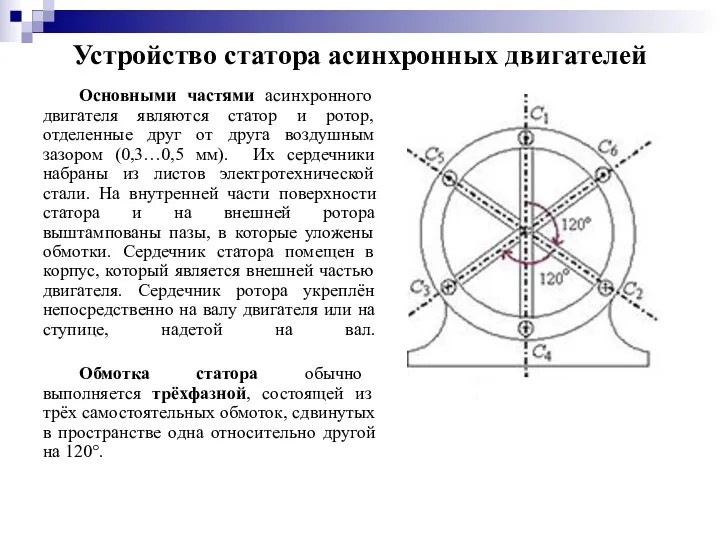
- 7. Устройство статора асинхронных двигателей Основными частями асинхронного двигателя являются статор и ротор, отделенные друг от друга
- 8. В двигателях низкого напряжения (до 1000 В) концы каждой фазы обмотки статора присоединены к клеммам, которые
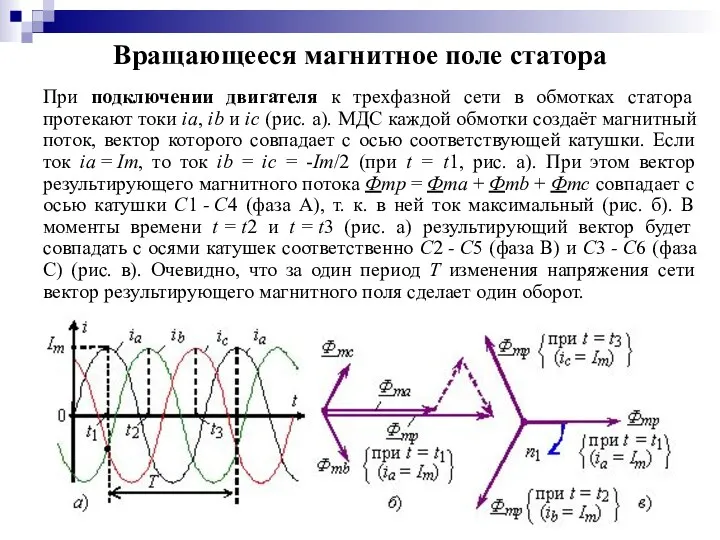
- 9. Вращающееся магнитное поле статора При подключении двигателя к трехфазной сети в обмотках статора протекают токи ia,
- 10. Таким образом, МДС трёх обмоток статора, расположенных в пространстве под углом 120° друг к другу, при
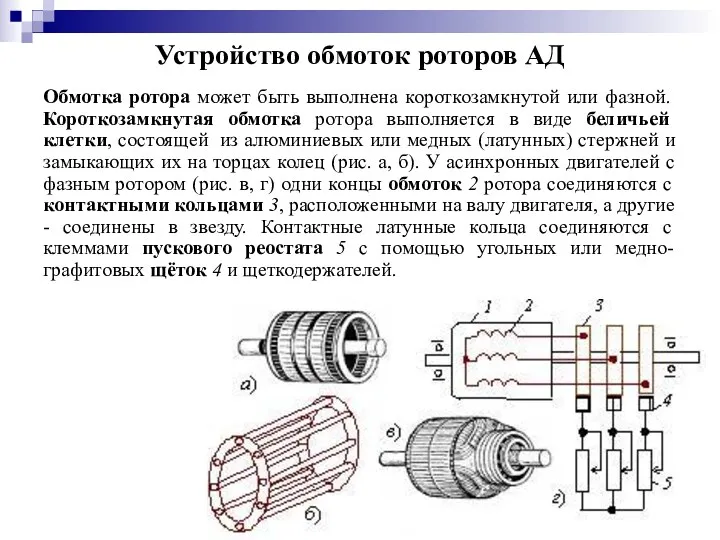
- 11. Устройство обмоток роторов АД Обмотка ротора может быть выполнена короткозамкнутой или фазной. Короткозамкнутая обмотка ротора выполняется
- 12. Устройство обмоток роторов АД
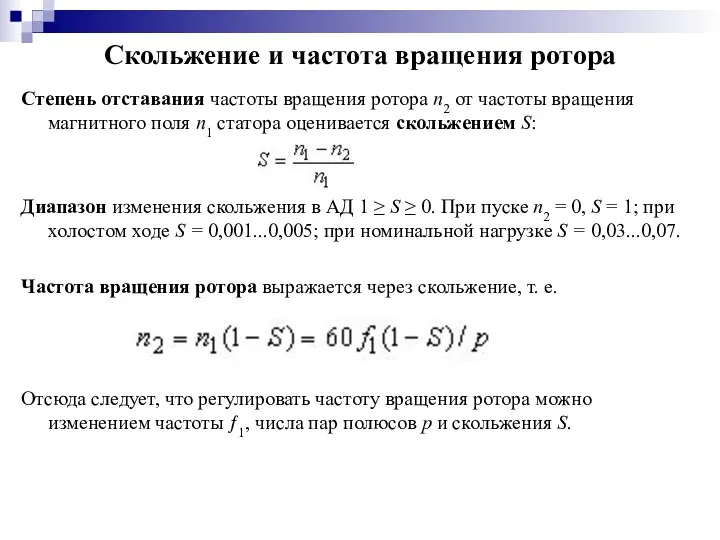
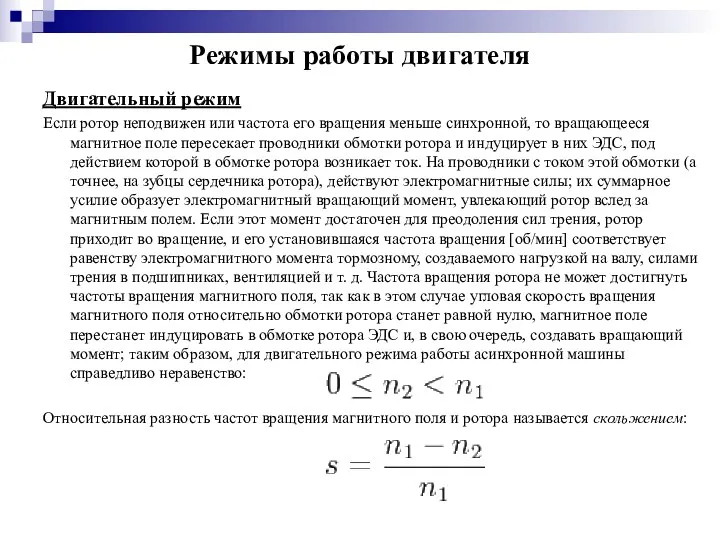
- 13. Скольжение и частота вращения ротора Степень отставания частоты вращения ротора n2 от частоты вращения магнитного поля
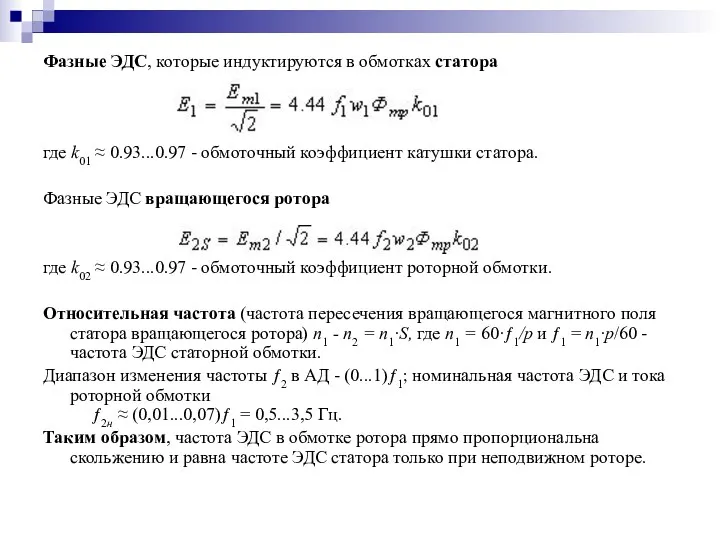
- 14. Фазные ЭДС, которые индуктируются в обмотках статора где k01 ≈ 0.93...0.97 - обмоточный коэффициент катушки статора.
- 15. Схемы замещения фаз статора и ротора АД Для анализа работы АД часто пользуются схемой замещения двигателя,
- 16. Итак, для схемы замещения можно записать: I1 = I0 - I′2 - уравнение токов, причём ток
- 17. Потери в двигателе Электрическая мощность, потребляемая АД из сети, частично расходуется на потери в стали ΔPcm1
- 18. Режимы работы двигателя Двигательный режим Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся
- 19. Режимы работы двигателя Генераторный режим Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до
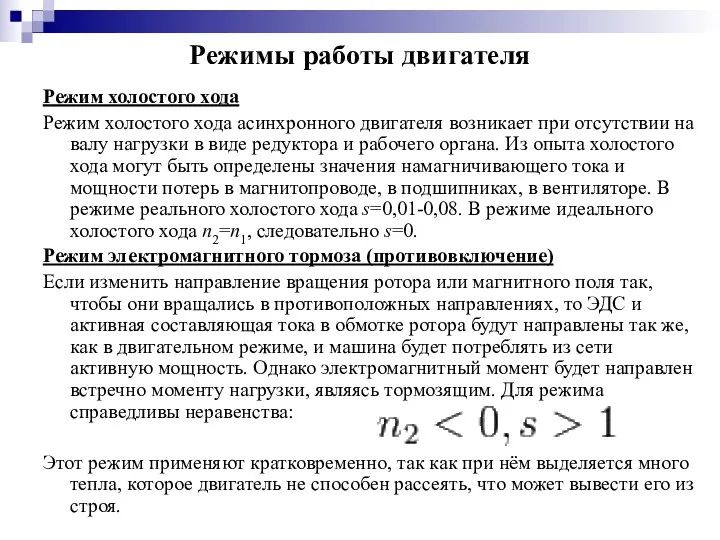
- 20. Режимы работы двигателя Режим холостого хода Режим холостого хода асинхронного двигателя возникает при отсутствии на валу
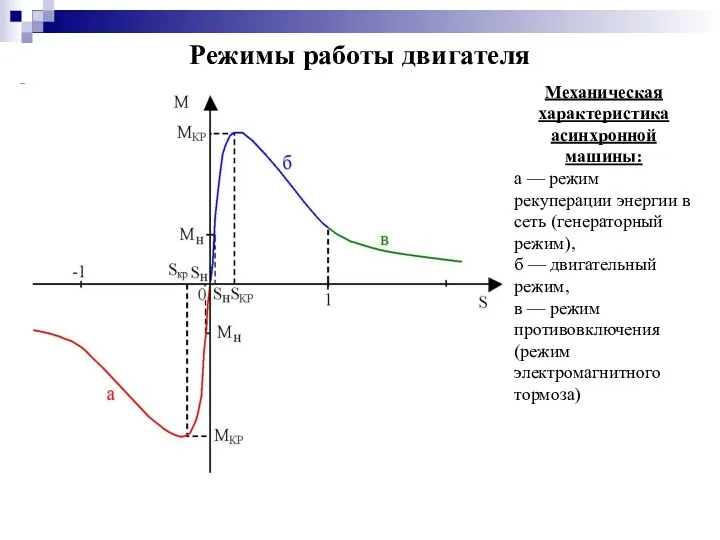
- 21. Режимы работы двигателя Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим),
- 23. Скачать презентацию

Назначение и области применения асинхронных двигателей
Основное применение асинхронные машины находят
Назначение и области применения асинхронных двигателей
Основное применение асинхронные машины находят
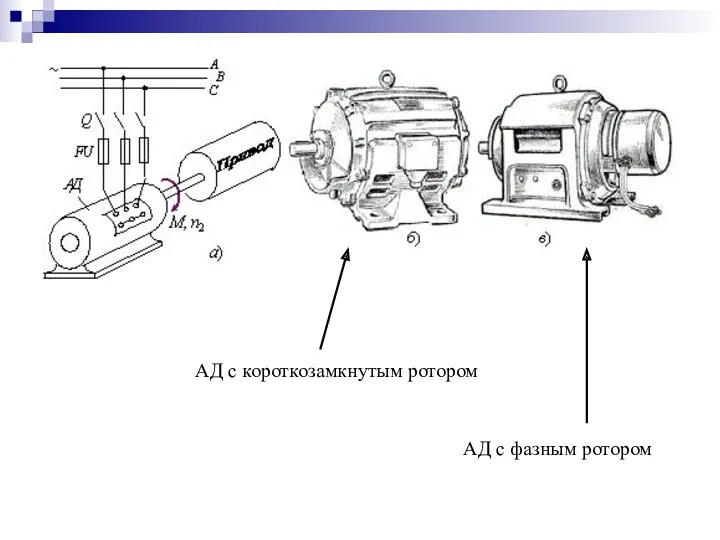
АД с короткозамкнутым ротором
АД с фазным ротором
АД с короткозамкнутым ротором
АД с фазным ротором
Наряду с преимуществами АД имеют ряд недостатков, основными из которых являются:
Наряду с преимуществами АД имеют ряд недостатков, основными из которых являются:
Устройство статора асинхронных двигателей
Основными частями асинхронного двигателя являются статор и
Устройство статора асинхронных двигателей
Основными частями асинхронного двигателя являются статор и
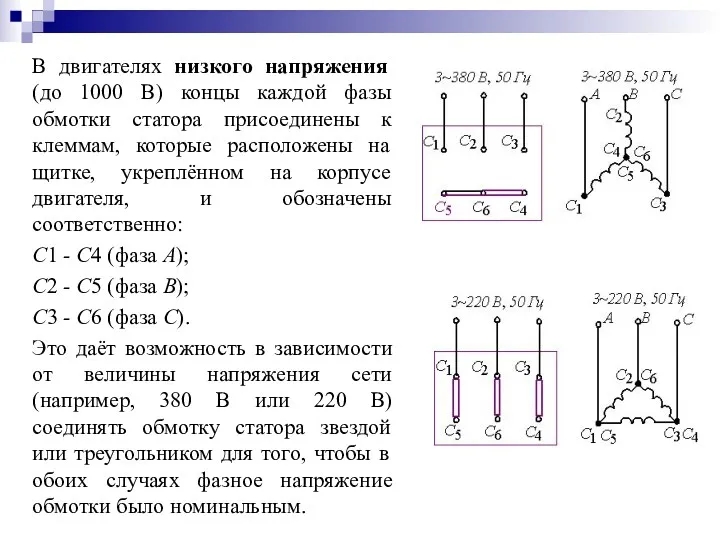
В двигателях низкого напряжения (до 1000 В) концы каждой фазы обмотки
В двигателях низкого напряжения (до 1000 В) концы каждой фазы обмотки
Вращающееся магнитное поле статора
При подключении двигателя к трехфазной сети в
Вращающееся магнитное поле статора
При подключении двигателя к трехфазной сети в
Таким образом, МДС трёх обмоток статора, расположенных в пространстве под углом
Таким образом, МДС трёх обмоток статора, расположенных в пространстве под углом
Устройство обмоток роторов АД
Обмотка ротора может быть выполнена короткозамкнутой или
Устройство обмоток роторов АД
Обмотка ротора может быть выполнена короткозамкнутой или

Устройство обмоток роторов АД
Устройство обмоток роторов АД
Скольжение и частота вращения ротора
Степень отставания частоты вращения ротора n2
Скольжение и частота вращения ротора
Степень отставания частоты вращения ротора n2
Фазные ЭДС, которые индуктируются в обмотках статора
где k01 ≈ 0.93...0.97 -
Фазные ЭДС, которые индуктируются в обмотках статора
где k01 ≈ 0.93...0.97 -
Схемы замещения фаз статора и ротора АД
Для анализа работы АД
Схемы замещения фаз статора и ротора АД
Для анализа работы АД
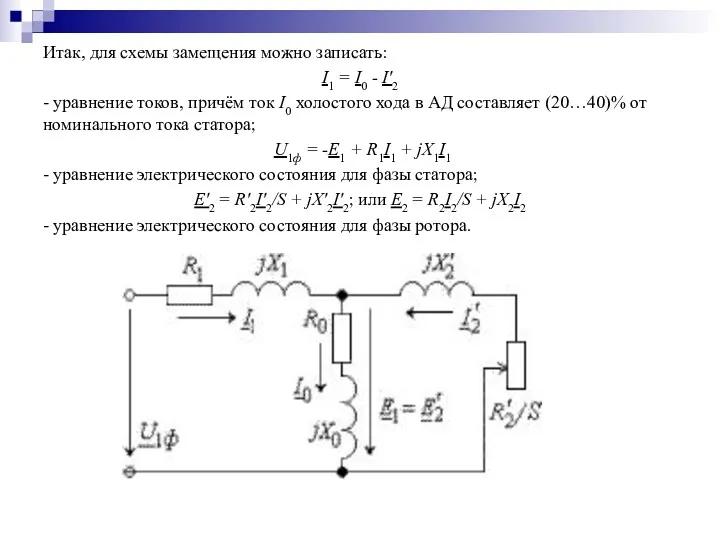
Итак, для схемы замещения можно записать:
I1 = I0 - I′2
- уравнение
Итак, для схемы замещения можно записать:
I1 = I0 - I′2
- уравнение
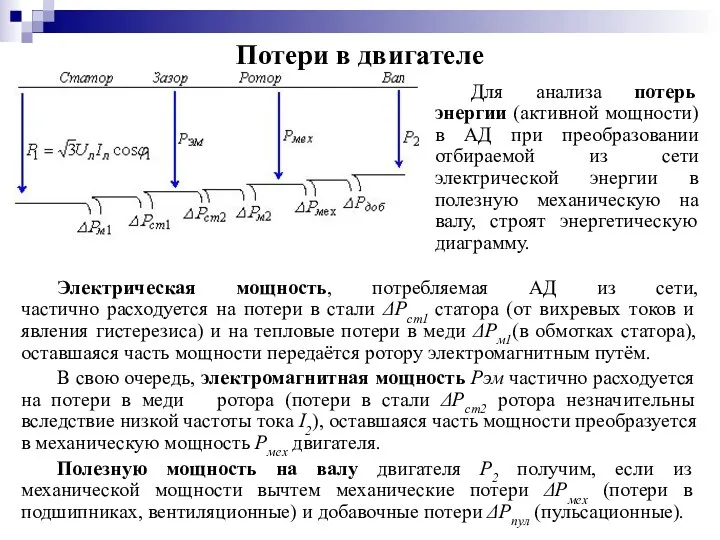
Потери в двигателе
Электрическая мощность, потребляемая АД из сети,
частично расходуется на
Потери в двигателе
Электрическая мощность, потребляемая АД из сети, частично расходуется на
Режимы работы двигателя
Двигательный режим
Если ротор неподвижен или частота его вращения
Режимы работы двигателя
Двигательный режим
Если ротор неподвижен или частота его вращения
Режимы работы двигателя
Генераторный режим
Если ротор разогнать с помощью внешнего момента
Режимы работы двигателя
Генераторный режим
Если ротор разогнать с помощью внешнего момента
Режимы работы двигателя
Режим холостого хода
Режим холостого хода асинхронного двигателя возникает
Режимы работы двигателя
Режим холостого хода
Режим холостого хода асинхронного двигателя возникает
Режимы работы двигателя
Механическая характеристика асинхронной машины:
а — режим рекуперации энергии в
Режимы работы двигателя
Механическая характеристика асинхронной машины:
а — режим рекуперации энергии в
 Лечебная физическая культура
Лечебная физическая культура КВН по сказкам А. С. Пушкина
КВН по сказкам А. С. Пушкина ПДД для Особого ребенка
ПДД для Особого ребенка Комплексная программа инновационного развития холдинга РЖД
Комплексная программа инновационного развития холдинга РЖД Создание собственного медиа-пространства на всех платформах социальных сетей
Создание собственного медиа-пространства на всех платформах социальных сетей Столетняя война 1337-1453
Столетняя война 1337-1453 Игры для развития мелкой моторики своими руками.
Игры для развития мелкой моторики своими руками. Таблица умножения и деления на 3
Таблица умножения и деления на 3 Женские образы, в романе М.А. Шолохова Тихий Дон
Женские образы, в романе М.А. Шолохова Тихий Дон презентация месяца и дни недели
презентация месяца и дни недели Мужские половые органы
Мужские половые органы Областной молодежный форум Достижение
Областной молодежный форум Достижение Company confidential Lenovo S660 Service Manual
Company confidential Lenovo S660 Service Manual Скорость химических реакций
Скорость химических реакций Исследовательская работа Моё здоровье
Исследовательская работа Моё здоровье Эксплуатация и ремонт аппаратов защиты
Эксплуатация и ремонт аппаратов защиты Город Севастополь
Город Севастополь День рождения
День рождения Угольная промышленность России
Угольная промышленность России Обработка мяса. Полуфабрикаты из мяса
Обработка мяса. Полуфабрикаты из мяса ЛИЧНОСТНО-ОРИЕНТИРОВАННАЯ ТЕХНОЛОГИЯ
ЛИЧНОСТНО-ОРИЕНТИРОВАННАЯ ТЕХНОЛОГИЯ Деятельность психолого-медико-педагогических комиссий в современных условиях
Деятельность психолого-медико-педагогических комиссий в современных условиях Художественные и телевизионные фильмы о жизни А.С Пушкина
Художественные и телевизионные фильмы о жизни А.С Пушкина Prezentatsia_Ruzina
Prezentatsia_Ruzina Классный час Радуга безопасности
Классный час Радуга безопасности Futur simple
Futur simple Полтавщина – мій рідний край. 75-річчю утворення Полтавської області присвячується
Полтавщина – мій рідний край. 75-річчю утворення Полтавської області присвячується Математика. 3 класс. Таблица умножения. Игра-тренажёр Собери ананас
Математика. 3 класс. Таблица умножения. Игра-тренажёр Собери ананас