Автоматический анализ изображений: современные подходы и тенденции для разных иерархических уровней представления видеоданных презентация
- Автоматический анализ изображений: современные подходы и тенденции для разных иерархических уровней представления видеоданных

Содержание
- 2. СОДЕРЖАНИЕ ДОКЛАДА введение в проблематику и краткий исторический экскурс интегральные и структурные методы описания изображений объектно-специфические
- 3. Традиционные методы распознавания и сопоставления, заимствованные из статистической теории связи, ограниченно эффективны в условиях действия естественных
- 4. b d c a a d c b d c a a d c b b
- 5. Снимок, сделанный в видимом оптическом диапазоне Кросскорреляционная функция радиолокационного и оптического снимков Кросскорреляционная функция снимков, сделанных
- 6. Аэрофотоснимок, сделанный в феврале Аэрофотоснимок той же местности, сделанный в мае Кросскорреляционная функция снимков, сделанных с
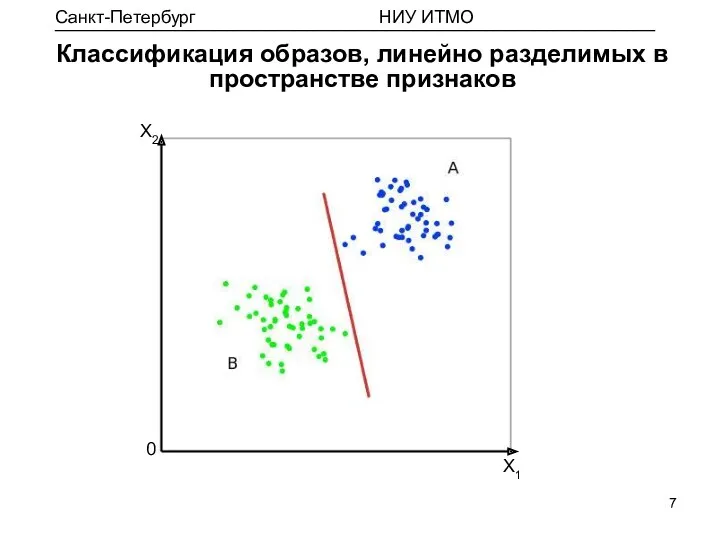
- 7. X1 X2 0 Классификация образов, линейно разделимых в пространстве признаков
- 8. Методы, основанные на интегральных пространственно-инвариантных признаках, неэффективны при распознавании реальных сцен Кластеры различных образов пересекаются в
- 9. Классификация изображений по цвето-текстурным признакам Степень инвариантности различных систем цвето-текстурных признаков к условиям освещения распознаваемой сцены
- 10. Примеры последовательности действий, соответствующих некоторым методам цвето-текстурного описания изображения
- 11. Показатели эффективности некоторых цвето-текстурных признаков при изменении условий наблюдения Рейтинги правильности результатов классификации
- 12. Проблема устойчивости результатов распознавания изображений к естественным изменениям наблюдаемых объектов более эффективно решается с применением структурных
- 13. Структурное описание изображения может быть очень обобщенным и робастным Крыша Стена Окно Дверь Обобщенное структурное описание
- 14. Обнаружение и распознавание объектов военной техники Однако алгоритмы, используемые в таких системах, обычно объектно-специфичны: для распознавания
- 15. Необходима разработка методов объектно-независимого структурного анализа изображений При выборе принципов построения объектно-независимой системы автоматического анализа изображений
- 16. Иерархический анализ изображений на основе алфавита обобщенных структурных элементов
- 17. Направленный осветитель Маленькое зеркало Проекция метки зоны внимания Стимулом к разработке алфавита обобщенных эталонов стали результаты
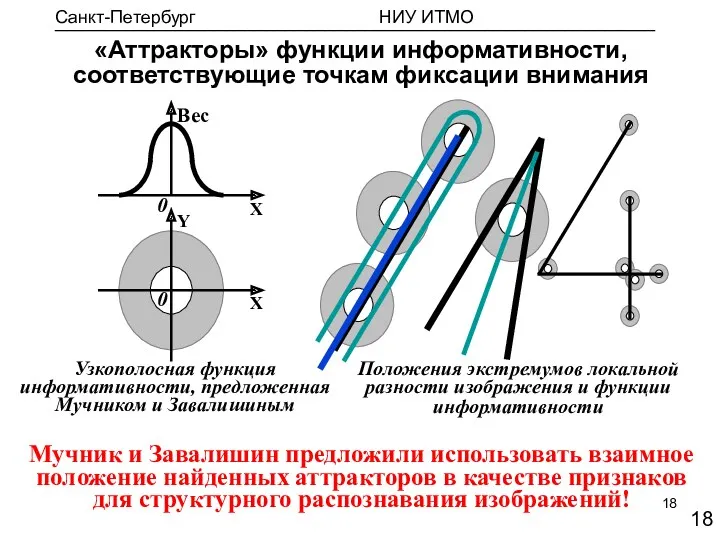
- 18. Вес Y X X «Аттракторы» функции информативности, соответствующие точкам фиксации внимания Положения экстремумов локальной разности изображения
- 19. Объектно-независимое ядро изображения пространственно компактного объекта y=sin(x)/x x 0 x x y=kx2+C 0 ω y(ω) 0
- 20. Объектно-независимый алфавит ортогональных непроизводных структурных элементов, инвариантных к аффинным преобразованиям E1-1: z=k1x2+k2y2+C=(k1x2+С1) + (k2y2+C2) = zx+
- 21. Выделение текселов Выделение контуров Выделение контурных структурных элементов Формирование зон внимания для выделения отдельных объектов Нулевой
- 22. Y?y ! Z?z D?d C?c B?b A?a A?b B?d C?m C?n B? f A?z B? w
- 23. Сопоставление структурных элементов на нижнем иерархическом уровне Отсечение ложных ветвей дерева решений Структурные элементы первого изображения
- 24. Коррекция формы групп Иерархическая система структурного сопоставления изображений Эффективность структурного сопоставления достигается за счет системного взаимодействия
- 25. Коррекция контурных структурных элементов на низшем иерархическом уровне под управлением структурного сопоставления на высшем уровне Сильно
- 26. Структурное сопоставление снимков, сделанных в разные сезоны Аэрофотоснимки, сделанные в феврале и мае Кросскорреляционная функция этих
- 27. Радиолокационный снимок Изображение видимого оптического диапазона Результат автоматического структурного сопоставления изображений, представленный в мозаичной форме Структурное
- 28. Контурный набросок самолета, сделанный от руки Растровое изображение самолета Результат автоматического сопоставления контурного наброска и растрового
- 29. Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5% Результат автоматического сопоставления и совмещения портретов
- 30. Пара портретов, для которых вычисленный показатель структурного сходства составил 3% Ассоциативные способности структурного классификатора походят на
- 31. Пара портретов, структурное сходство которых оказалось ниже порога принятия решения Ассоциативные способности структурного классификатора походят на
- 32. Сопоставление изображения местности с ее эталонными снимками в задаче автоматической навигации беспилотного летательного аппарата Аэрофотоснимок местности,
- 33. Ограничения: Структурный классификатор разработан для сопоставления изображений двумерных объектов. Он не может правильно сопоставлять изображения трехмерных
- 34. Формирование зоны внимания на основе структурного элемента первого типа Анализируемое изображение Текущее положение зоны внимания Гистограмма
- 35. Примеры формирования зон внимания, соответствующих структурным элементам первого типа, выделенным по признакам яркости Примеры аэрофотоснимков и
- 36. Автоматическое построение зон внимания, на основе локального анализа текстур Исходный аэрофотоснимок. Подлежащие выделению ландшафтные объекты обведены
- 37. 1. Средняя локальная яркость. 2. Локальная пространственная плотность расположения текселов. 3. Средние размеры (длина и ширина)
- 38. Структурное описание текстур в алфавите обобщенных структурных элементов Аэрофотоснимок Результат сегментации снимка по текстуре Текселы, представленные
- 39. Сегментация изображения по текстуре нескольких иерархических уровней Аэрофотоснимок высокого пространственного разрешения Фрагментированный результат сегментации снимка по
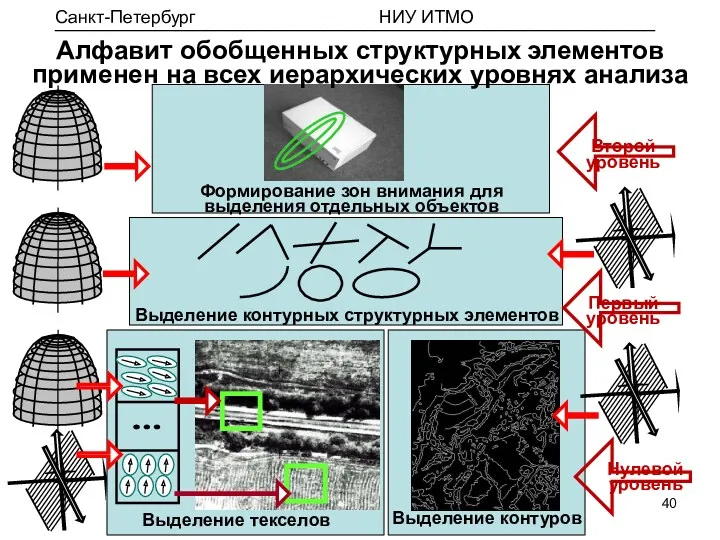
- 40. Выделение текселов Выделение контуров Выделение контурных структурных элементов Формирование зон внимания для выделения отдельных объектов Нулевой
- 41. Количество уровней структурного анализа изображений может и дальше увеличиваться с учетом иерархической организации окружающего мира На
- 42. На основании свойств обобщенных структурных элементов, содержащихся в изображении, определены в аналитическом виде параметры его аффинного
- 43. Вслед за живыми зрительными системами измерены параметры проективного преобразования по параметрам смещения обобщенных структурных элементов, содержащихся
- 44. Применение более сложных структурных элементов позволило бы абстрагироваться от двумерной модели анализируемой сцены и уменьшить размерность
- 45. Алгоритм Виолы-Джонса Алгоритм Виолы-Джонса выделяет простые структурные элементы анализируемого изображения (в форме вейвлетов Хаара) в скользящем
- 46. Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц
- 47. Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц
- 48. Вычисление структурных элементов как дескрипторов окрестностей характерных точек изображения
- 49. Исходное изображение Векторы локальных градиентов Нахождение положений ключевых точек - локальных максимумов «градиента» яркости на разных
- 50. Нормализация относительно вращения областей вычисления SIFT- или SURF-признаков ключевых точек Локальная окрестность каждой найденной ключевой точки
- 51. Вычисление вектора признаков каждой ключевой точки Гистограммы направления градиентов вычисляются в 4 (для SIFT) или 16
- 52. Структурное распознавание изображения по дескрипторам его ключевых точек База дескрипторов каждой ключевой точки эталонных изображений
- 53. Параметры взаимного геометрического преобразования сопоставленных ключевых точек также опционально могут анализироваться в сравниваемых изображениях Пара сопоставляемых
- 54. Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT
- 55. Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT
- 56. Примеры ключевых точек, сопоставленных по SURF-дескрипторам, в экспериментах, проведенных в ГОИ им. С.И. Вавилова
- 57. Одна из экспериментальных моделей домашнего робота LG-Electronics с системой зрения, разработанной в ГОИ им. С.И. Вавилова
- 58. Примеры ключевых точек, сопоставленных в зрительной навигационной системе робота Входное изображение от камеры, смотрящей вверх Эталонное
- 59. Разработано множество других методов выбора и описания ключевых точек, вот примеры некоторых из них Пара сопоставляемых
- 60. Для сокращения времени перебора эталонных описаний ключевых точек при распознавании методом ближайшего соседа используется метод “Bag
- 61. Одна из модификаций алгоритма SIFT - Dense SIFT SIFT-дескрипторы вычисляются не в окрестностях ключевых точек, а
- 62. Метод HOG (гистограммы ориентации градиентов) можно считать развитием метода Dense SIFT Гистограммы направлений градиентов вычисляются не
- 63. Метод HOG (гистограммы ориентации градиентов) Положительные примеры Отрицательные примеры Гистограммы градиентов Обучение классификатора SVM Распознавание a
- 64. Добавим теперь возможность перемещаться отдельным частям распознаваемого объекта Описание и обнаружение объекта на основе раздельно настраиваемых
- 65. Программа с перемещающимися частями объекта – один из победителей, соревнования в системе IMAGE-NET Классификация таких изображений
- 66. Применяемый алгоритм обеспечивает чрезвычайно надежную классификацию, но слишком вычислительно сложен
- 67. Причина вычислительной сложности процесса классификации – его реализация на единственном иерархическом уровне Процедура классификации вызывается повторно
- 68. Возможный путь уменьшения вычислительной сложности процедуры классификации – ее иерархическая реализация
- 69. Вручную были составлены 3 суперкласса, состоящие из классов изображений, визуально сходных согласно субъективному восприятию человека. Относящийся
- 70. Настройка эталонного описания суперкласса, включающего велосипеды и мотоциклы Примеры обучающих образов Ракурс #1 Ракурс #2 Ракурс
- 71. Примеры обучающих образов Ракурс #1 Ракурс #2 Ракурс #3 Эталонное описание объекта целиком Эталонные описания частей
- 72. Примеры обучающих образов Ракурс #1 Ракурс #2 Ракурс #3 Эталонное описание объекта целиком Эталонные описания частей
- 73. Настроенные эталонные векторы признаков были автоматически кластеризованы в 6 суперклассов: 6≈ 40, что почти оптимально для
- 74. Иллюстрация результата почти оптимального автоматического построения 6 суперклассов с использованием стандартной процедуры кластеризации. Эксперименты с суперклассами,
- 75. Санкт-Петербург НИУ ИТМО ____________________________________________________________ Почему бы не определять количество и частей их положения полностью автоматически ?
- 76. Санкт-Петербург НИУ ИТМО ____________________________________________________________ Сеть вычисляет коэффициенты корреляции фрагментов изображений с усредненными локальными эталонами на нескольких
- 77. При решении современных практически важных проблем необходимо переходить от распознавания 2D изображений к анализу 3D сцен
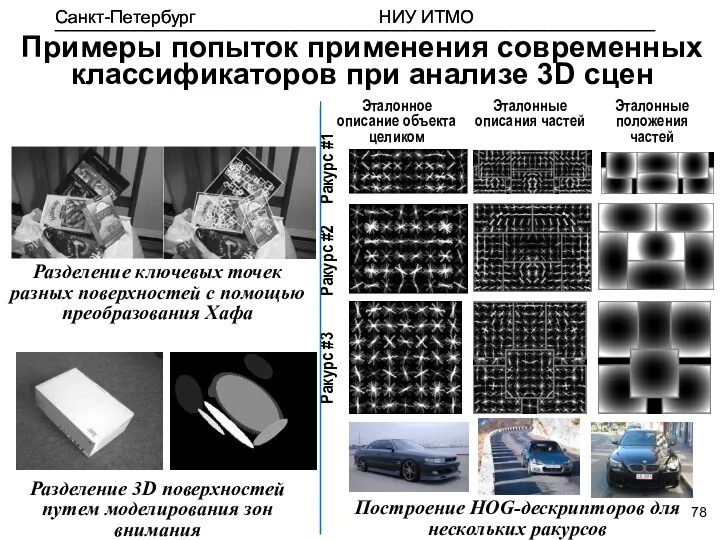
- 78. Санкт-Петербург НИУ ИТМО ____________________________________________________________ Построение HOG-дескрипторов для нескольких ракурсов Разделение ключевых точек разных поверхностей с помощью
- 79. Необходимо научиться более явно и полно анализировать и использовать доступную информацию о третьей пространственной координате Санкт-Петербург
- 80. У нас есть идеи, как анализировать изображения 3D сцен в алфавите объектно-независимых обобщенных структурных элементов E1-1:
- 81. Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5% Результат автоматического сопоставления и совмещения портретов
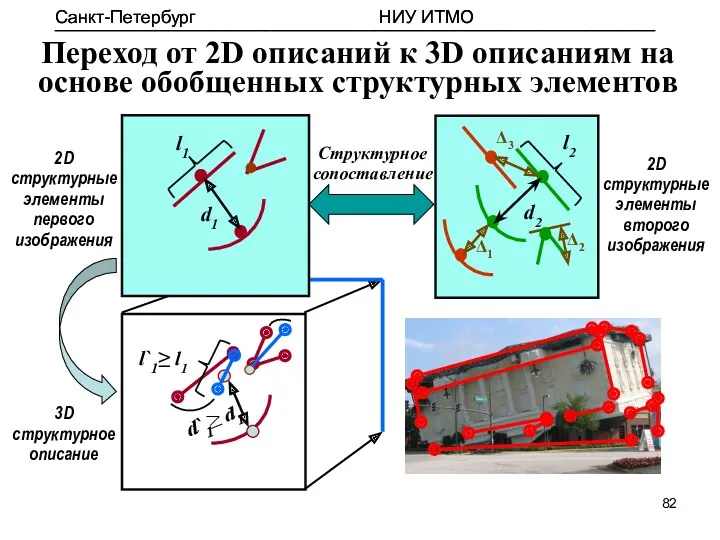
- 82. Санкт-Петербург НИУ ИТМО ____________________________________________________________ Переход от 2D описаний к 3D описаниям на основе обобщенных структурных элементов
- 83. Санкт-Петербург НИУ ИТМО ____________________________________________________________ Использование 3D метрики вместо 2D метрики Использование 3D угловой меры вместо 2D
- 84. Возможно, кто-то из Вас захочет принять участие в наших исследованиях или самостоятельно доработать другие современные методы
- 86. Скачать презентацию
СОДЕРЖАНИЕ ДОКЛАДА
введение в проблематику и краткий исторический экскурс
интегральные и
СОДЕРЖАНИЕ ДОКЛАДА
введение в проблематику и краткий исторический экскурс
интегральные и
Традиционные методы распознавания и сопоставления, заимствованные из статистической теории связи, ограниченно
Традиционные методы распознавания и сопоставления, заимствованные из статистической теории связи, ограниченно
b
d
c
a
a
d
c
b
d
c
a
a
d
c
b
b
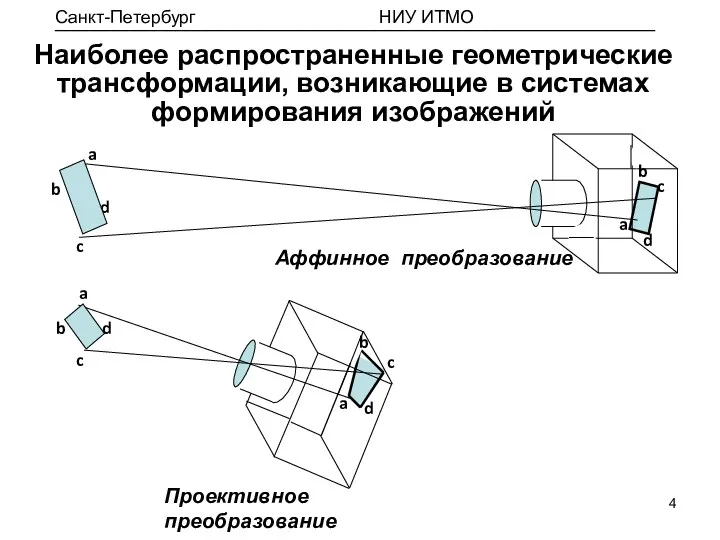
Наиболее распространенные геометрические трансформации, возникающие в системах формирования изображений
Аффинное преобразование
Проективное преобразование
b
d
c
a
a
d
c
b
d
c
a
a
d
c
b
b
Наиболее распространенные геометрические трансформации, возникающие в системах формирования изображений
Аффинное преобразование
Проективное преобразование
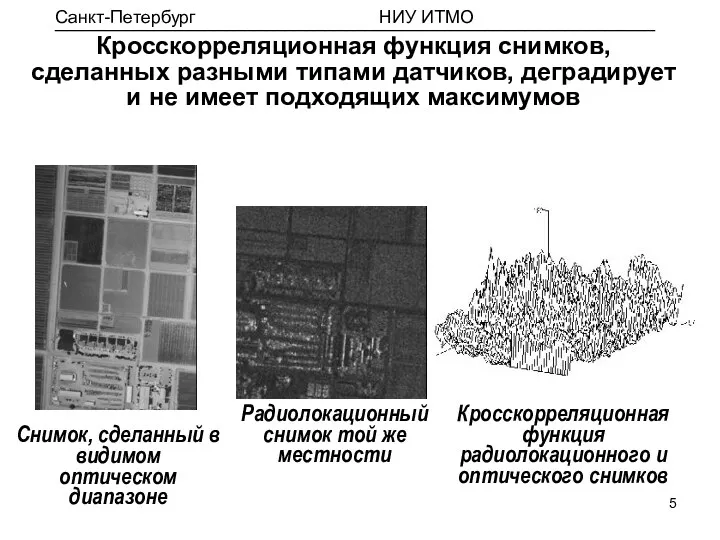
Снимок, сделанный в видимом оптическом диапазоне
Кросскорреляционная функция радиолокационного и оптического снимков
Кросскорреляционная
Снимок, сделанный в видимом оптическом диапазоне
Кросскорреляционная функция радиолокационного и оптического снимков
Кросскорреляционная

Аэрофотоснимок, сделанный в феврале
Аэрофотоснимок той же местности, сделанный в мае
Кросскорреляционная функция
Аэрофотоснимок, сделанный в феврале
Аэрофотоснимок той же местности, сделанный в мае
Кросскорреляционная функция
X1
X2
0
Классификация образов, линейно разделимых в пространстве признаков
X1
X2
0
Классификация образов, линейно разделимых в пространстве признаков
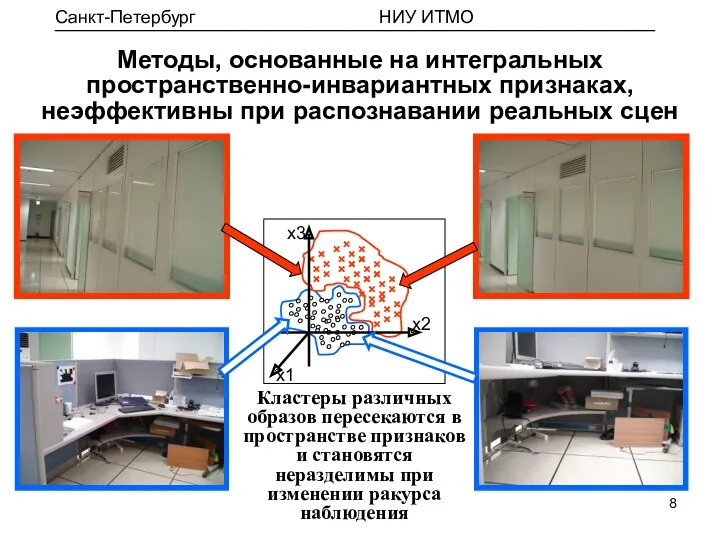
Методы, основанные на интегральных пространственно-инвариантных признаках, неэффективны при распознавании реальных сцен
Кластеры
Методы, основанные на интегральных пространственно-инвариантных признаках, неэффективны при распознавании реальных сцен
Кластеры

Классификация изображений по цвето-текстурным признакам
Степень инвариантности различных систем цвето-текстурных признаков к
Классификация изображений по цвето-текстурным признакам
Степень инвариантности различных систем цвето-текстурных признаков к
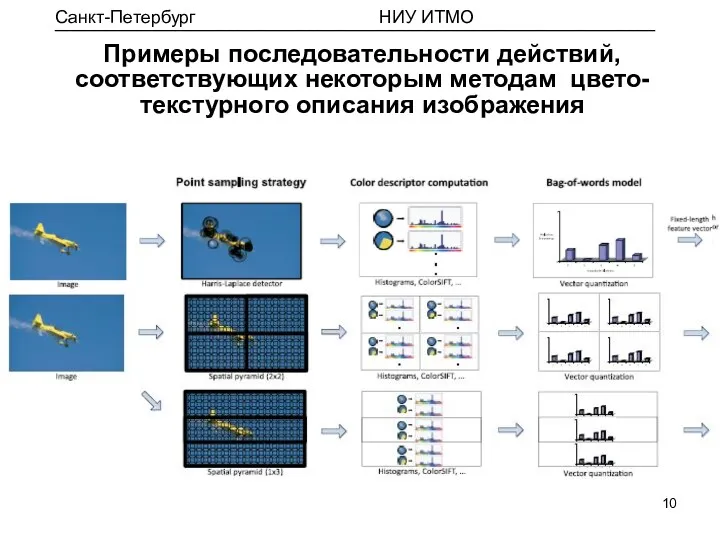
Примеры последовательности действий, соответствующих некоторым методам цвето-текстурного описания изображения
Примеры последовательности действий, соответствующих некоторым методам цвето-текстурного описания изображения

Показатели эффективности некоторых цвето-текстурных признаков при изменении условий наблюдения
Рейтинги правильности результатов
Показатели эффективности некоторых цвето-текстурных признаков при изменении условий наблюдения
Рейтинги правильности результатов
Проблема устойчивости результатов распознавания изображений к естественным изменениям наблюдаемых объектов более
Проблема устойчивости результатов распознавания изображений к естественным изменениям наблюдаемых объектов более

Структурное описание изображения может быть очень обобщенным и робастным
Крыша
Стена
Окно
Дверь
Обобщенное структурное описание
Структурное описание изображения может быть очень обобщенным и робастным
Крыша
Стена
Окно
Дверь
Обобщенное структурное описание
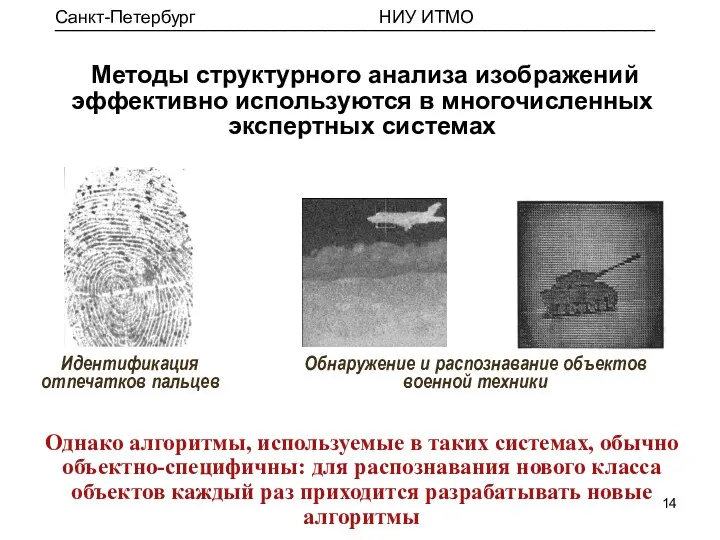
Обнаружение и распознавание объектов военной техники
Однако алгоритмы, используемые в таких системах,
Обнаружение и распознавание объектов военной техники
Однако алгоритмы, используемые в таких системах,
Необходима разработка методов объектно-независимого структурного анализа изображений
При выборе принципов построения объектно-независимой
Необходима разработка методов объектно-независимого структурного анализа изображений
При выборе принципов построения объектно-независимой
Иерархический анализ изображений на основе алфавита обобщенных структурных элементов
Иерархический анализ изображений на основе алфавита обобщенных структурных элементов
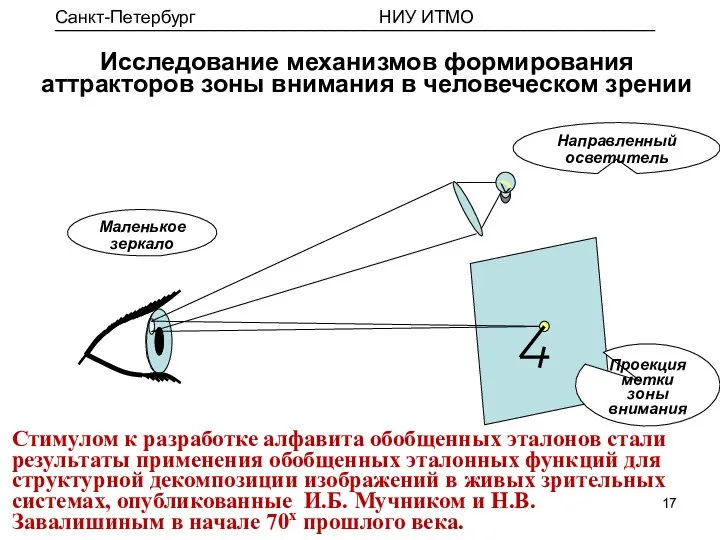
Направленный осветитель
Маленькое зеркало
Проекция метки зоны внимания
Стимулом к разработке алфавита обобщенных эталонов
Направленный осветитель
Маленькое зеркало
Проекция метки зоны внимания
Стимулом к разработке алфавита обобщенных эталонов
Вес
Y
X
X
«Аттракторы» функции информативности, соответствующие точкам фиксации внимания
Положения экстремумов локальной разности изображения
Вес
Y
X
X
«Аттракторы» функции информативности, соответствующие точкам фиксации внимания
Положения экстремумов локальной разности изображения
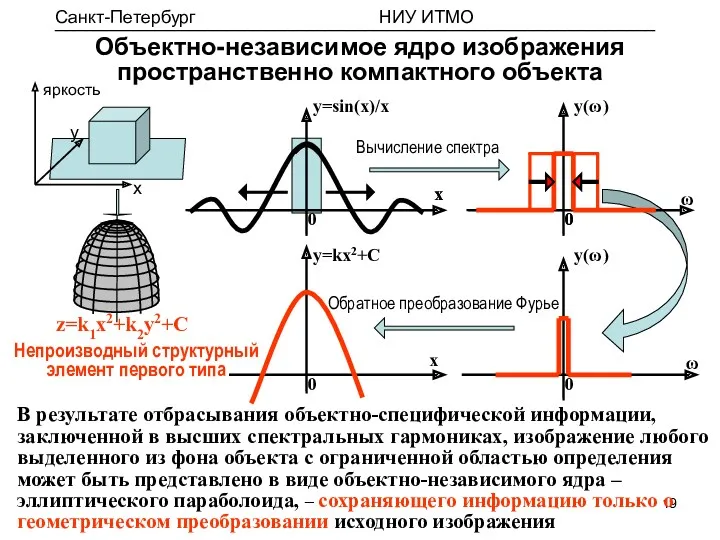
Объектно-независимое ядро изображения пространственно компактного объекта
y=sin(x)/x
x
0
x
x
y=kx2+C
0
ω
y(ω)
0
y(ω)
ω
0
0
Вычисление спектра
Обратное преобразование Фурье
В результате отбрасывания
Объектно-независимое ядро изображения пространственно компактного объекта
y=sin(x)/x
x
0
x
x
y=kx2+C
0
ω
y(ω)
0
y(ω)
ω
0
0
Вычисление спектра
Обратное преобразование Фурье
В результате отбрасывания

Объектно-независимый алфавит ортогональных непроизводных структурных элементов,
инвариантных к аффинным преобразованиям
E1-1: z=k1x2+k2y2+C=(k1x2+С1)
Объектно-независимый алфавит ортогональных непроизводных структурных элементов,
инвариантных к аффинным преобразованиям
E1-1: z=k1x2+k2y2+C=(k1x2+С1)

Выделение текселов
Выделение контуров
Выделение контурных структурных элементов
Формирование зон внимания для выделения отдельных
Выделение текселов
Выделение контуров
Выделение контурных структурных элементов
Формирование зон внимания для выделения отдельных

Y?y
!
Z?z
D?d
C?c
B?b
A?a
A?b
B?d
C?m
C?n
Y?y
!
Z?z
D?d
C?c
B?b
A?a
A?b
B?d
C?m
C?n
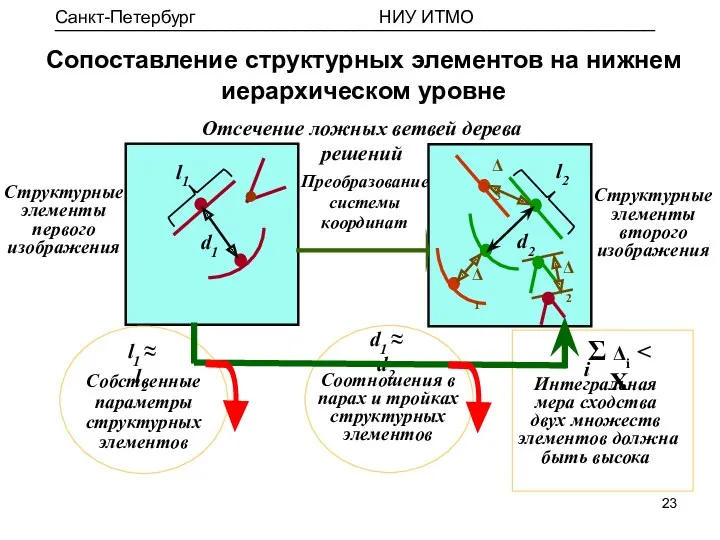
Сопоставление структурных элементов на нижнем иерархическом уровне
Отсечение ложных ветвей дерева решений
Структурные
Сопоставление структурных элементов на нижнем иерархическом уровне
Отсечение ложных ветвей дерева решений
Структурные

Коррекция формы групп
Иерархическая система структурного сопоставления изображений
Эффективность структурного сопоставления достигается за
Коррекция формы групп
Иерархическая система структурного сопоставления изображений
Эффективность структурного сопоставления достигается за
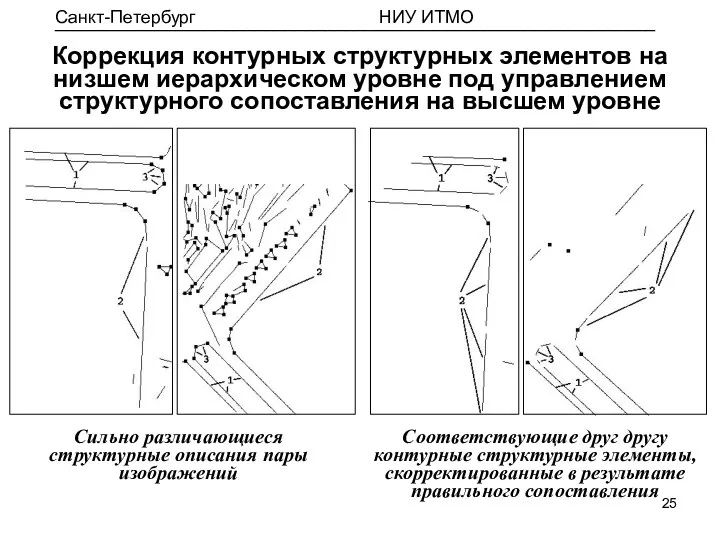
Коррекция контурных структурных элементов на низшем иерархическом уровне под управлением структурного
Коррекция контурных структурных элементов на низшем иерархическом уровне под управлением структурного
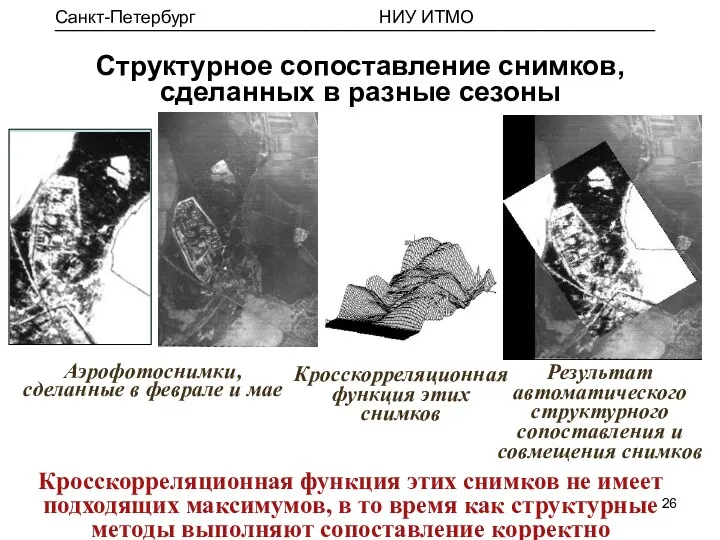
Структурное сопоставление снимков, сделанных в разные сезоны
Аэрофотоснимки, сделанные в феврале и
Структурное сопоставление снимков, сделанных в разные сезоны
Аэрофотоснимки, сделанные в феврале и

Радиолокационный снимок
Изображение видимого оптического диапазона
Результат автоматического структурного сопоставления изображений, представленный в
Радиолокационный снимок
Изображение видимого оптического диапазона
Результат автоматического структурного сопоставления изображений, представленный в
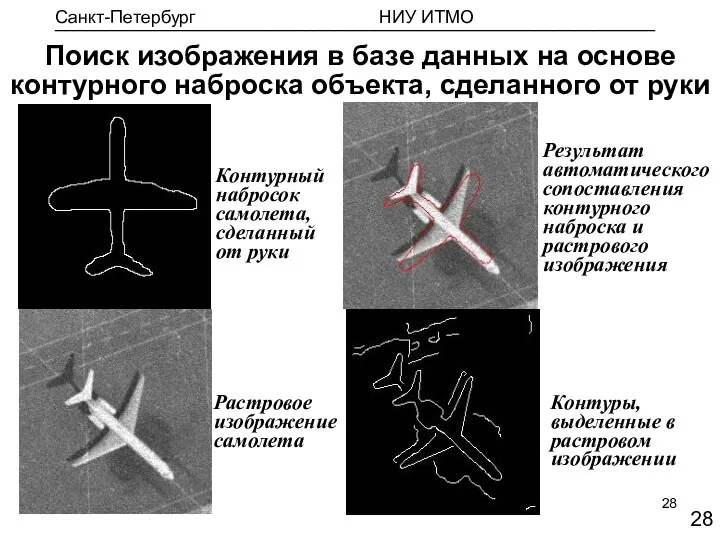
Контурный набросок самолета, сделанный от руки
Растровое изображение самолета
Результат автоматического сопоставления контурного
Контурный набросок самолета, сделанный от руки
Растровое изображение самолета
Результат автоматического сопоставления контурного

Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5%
Результат
Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5%
Результат

Пара портретов, для которых вычисленный показатель структурного сходства составил 3%
Ассоциативные
Пара портретов, для которых вычисленный показатель структурного сходства составил 3%
Ассоциативные

Пара портретов, структурное сходство которых оказалось ниже порога принятия решения
Ассоциативные
Пара портретов, структурное сходство которых оказалось ниже порога принятия решения
Ассоциативные
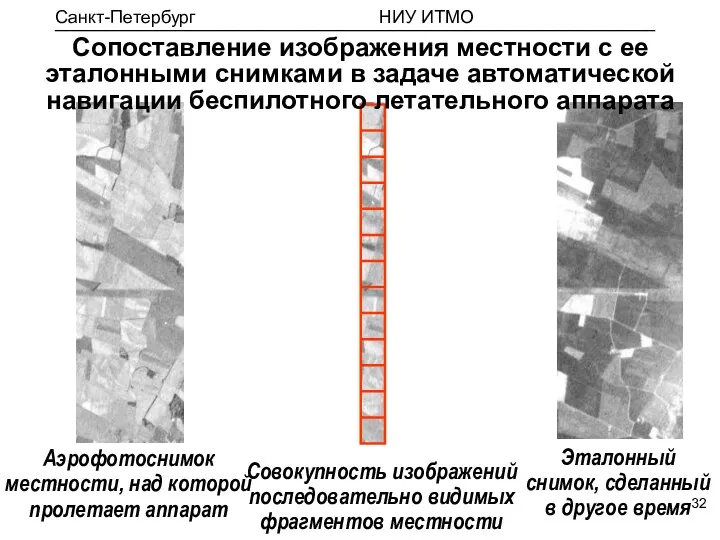
Сопоставление изображения местности с ее эталонными снимками в задаче автоматической навигации
Сопоставление изображения местности с ее эталонными снимками в задаче автоматической навигации
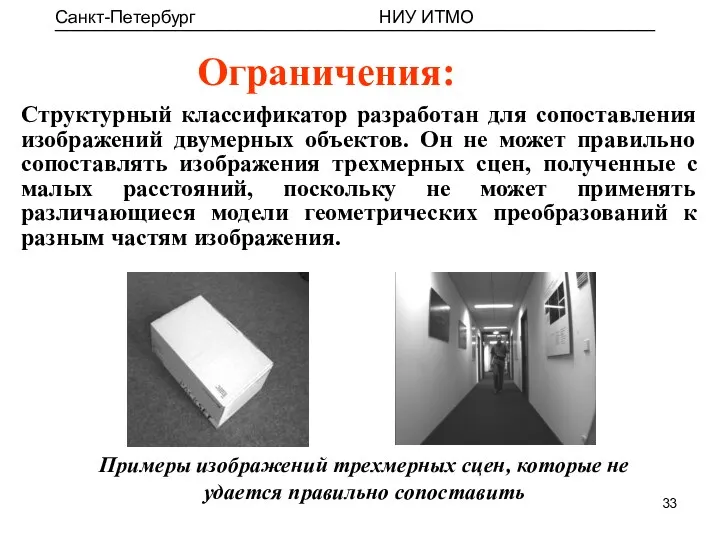
Ограничения:
Структурный классификатор разработан для сопоставления изображений двумерных объектов. Он не может
Ограничения:
Структурный классификатор разработан для сопоставления изображений двумерных объектов. Он не может
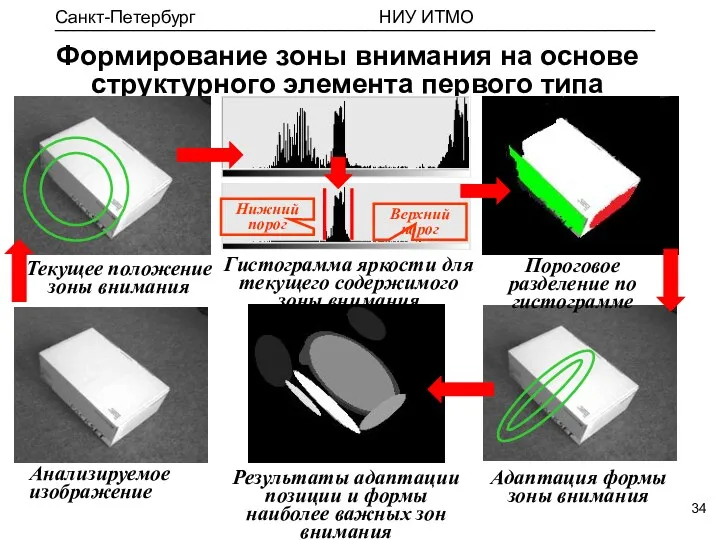
Формирование зоны внимания на основе структурного элемента первого типа
Анализируемое изображение
Текущее положение
Формирование зоны внимания на основе структурного элемента первого типа
Анализируемое изображение
Текущее положение

Примеры формирования зон внимания, соответствующих структурным элементам первого типа, выделенным по
Примеры формирования зон внимания, соответствующих структурным элементам первого типа, выделенным по
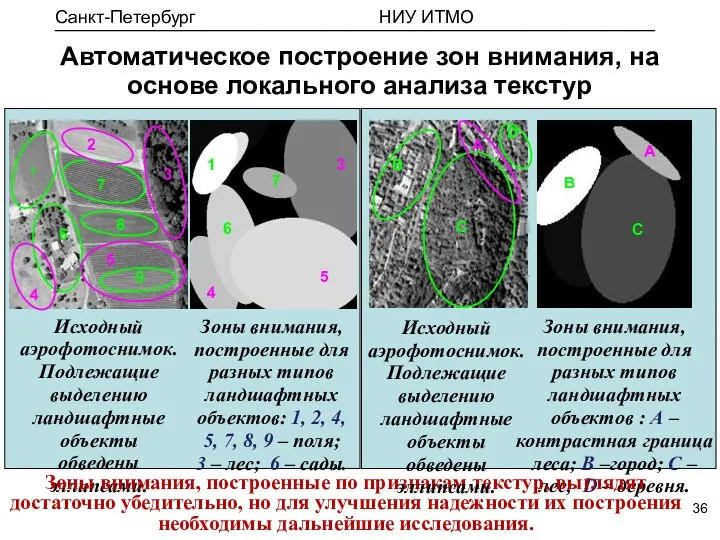
Автоматическое построение зон внимания, на основе локального анализа текстур
Исходный аэрофотоснимок. Подлежащие
Автоматическое построение зон внимания, на основе локального анализа текстур
Исходный аэрофотоснимок. Подлежащие
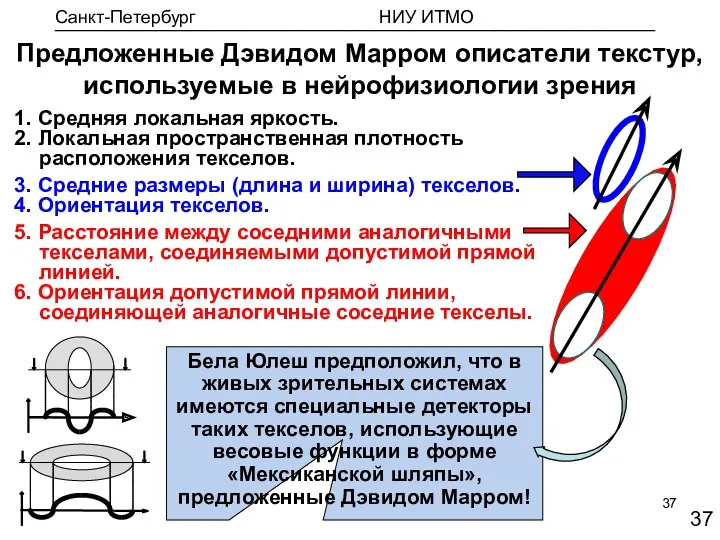
1. Средняя локальная яркость.
2. Локальная пространственная плотность расположения текселов.
3. Средние размеры
1. Средняя локальная яркость.
2. Локальная пространственная плотность расположения текселов.
3. Средние размеры
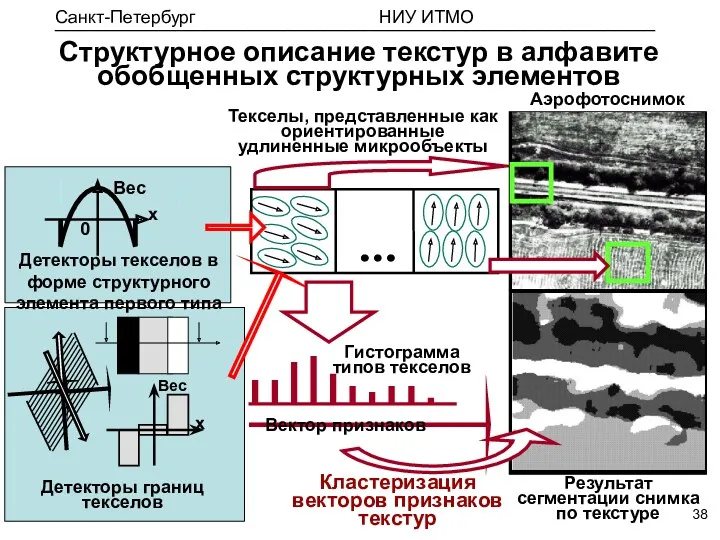
Структурное описание текстур в алфавите обобщенных структурных элементов
Аэрофотоснимок
Результат сегментации снимка по
Структурное описание текстур в алфавите обобщенных структурных элементов
Аэрофотоснимок
Результат сегментации снимка по

Сегментация изображения по текстуре нескольких иерархических уровней
Аэрофотоснимок высокого пространственного разрешения
Фрагментированный результат
Сегментация изображения по текстуре нескольких иерархических уровней
Аэрофотоснимок высокого пространственного разрешения
Фрагментированный результат
Выделение текселов
Выделение контуров
Выделение контурных структурных элементов
Формирование зон внимания для выделения отдельных
Выделение текселов
Выделение контуров
Выделение контурных структурных элементов
Формирование зон внимания для выделения отдельных

Количество уровней структурного анализа изображений может и дальше увеличиваться с учетом
Количество уровней структурного анализа изображений может и дальше увеличиваться с учетом
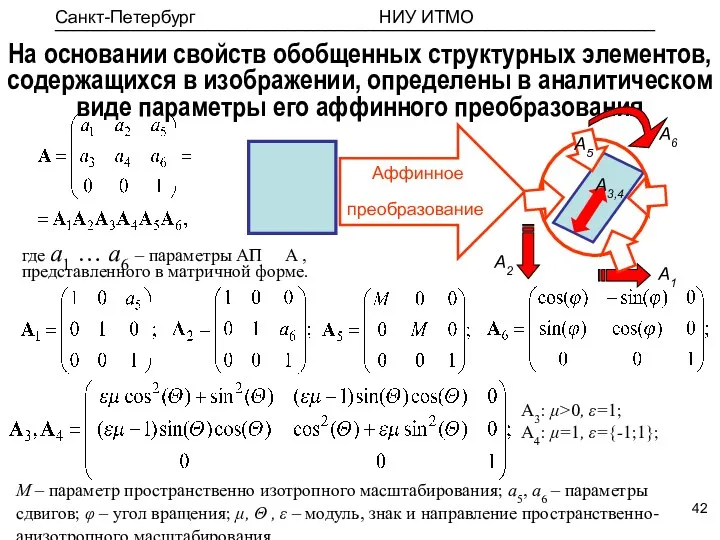
На основании свойств обобщенных структурных элементов, содержащихся в изображении, определены в
На основании свойств обобщенных структурных элементов, содержащихся в изображении, определены в
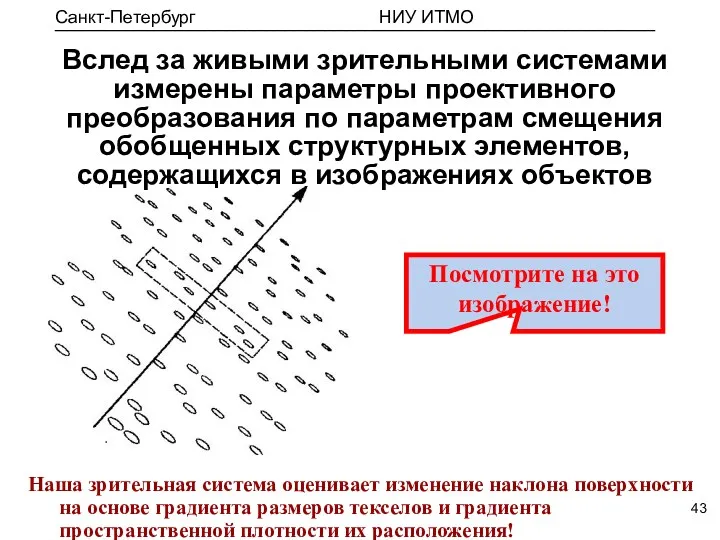
Вслед за живыми зрительными системами измерены параметры проективного преобразования по параметрам
Вслед за живыми зрительными системами измерены параметры проективного преобразования по параметрам
Применение более сложных структурных элементов позволило бы абстрагироваться от двумерной модели
Применение более сложных структурных элементов позволило бы абстрагироваться от двумерной модели
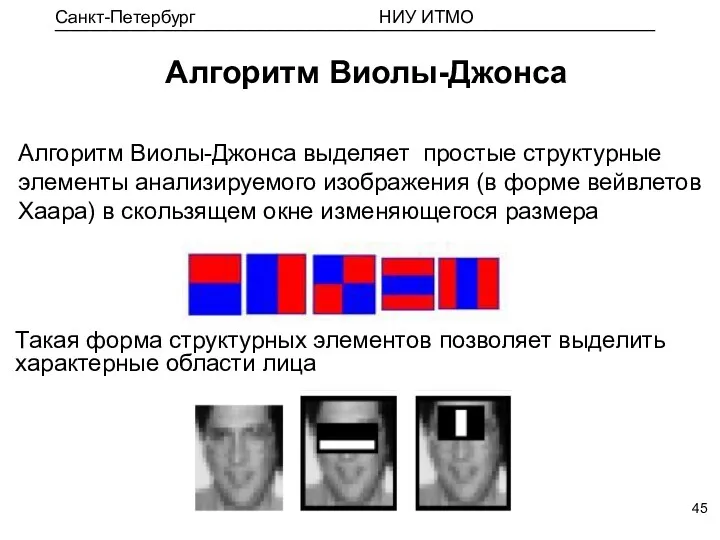
Алгоритм Виолы-Джонса
Алгоритм Виолы-Джонса выделяет простые структурные элементы анализируемого изображения (в форме
Алгоритм Виолы-Джонса
Алгоритм Виолы-Джонса выделяет простые структурные элементы анализируемого изображения (в форме

Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц
Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц

Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц
Примеры результатов применения алгоритма Виолы-Джонса для обнаружения лиц
Вычисление структурных элементов как дескрипторов окрестностей характерных точек изображения
Вычисление структурных элементов как дескрипторов окрестностей характерных точек изображения

Исходное изображение
Векторы локальных градиентов
Нахождение положений ключевых точек - локальных максимумов «градиента»
Исходное изображение
Векторы локальных градиентов
Нахождение положений ключевых точек - локальных максимумов «градиента»
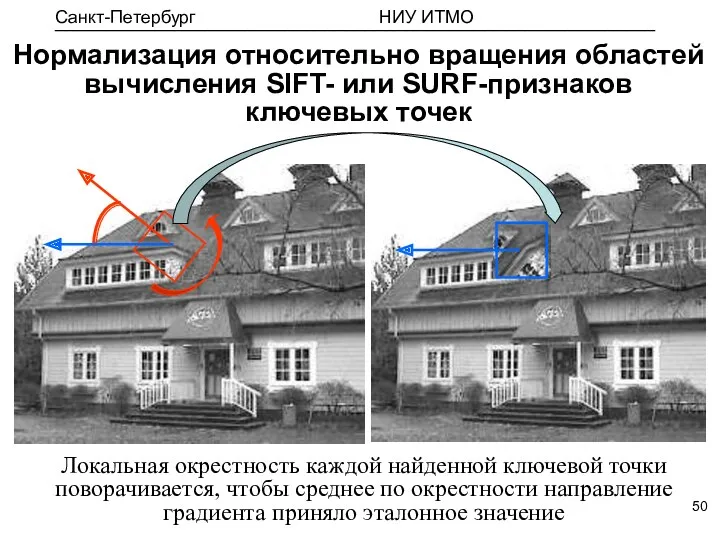
Нормализация относительно вращения областей вычисления SIFT- или SURF-признаков ключевых точек
Локальная окрестность
Нормализация относительно вращения областей вычисления SIFT- или SURF-признаков ключевых точек
Локальная окрестность
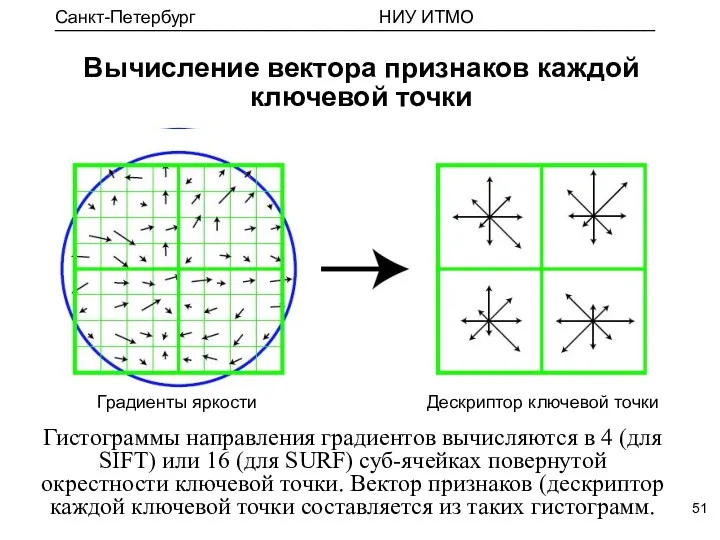
Вычисление вектора признаков каждой ключевой точки
Гистограммы направления градиентов вычисляются в 4
Вычисление вектора признаков каждой ключевой точки
Гистограммы направления градиентов вычисляются в 4
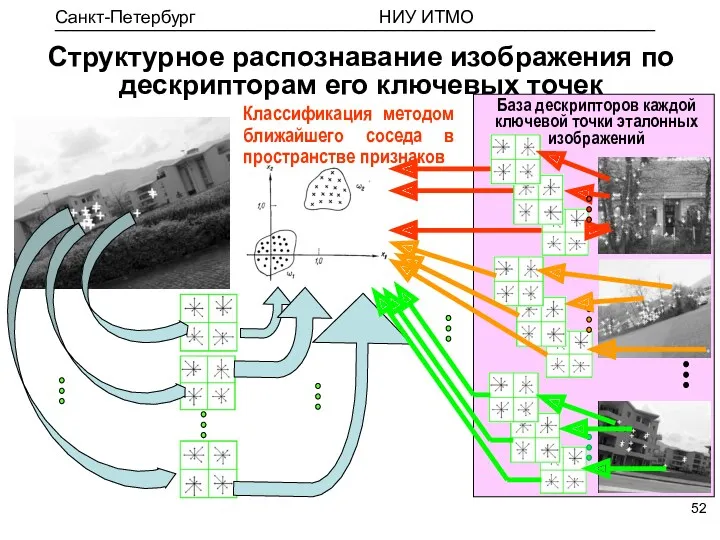
Структурное распознавание изображения по дескрипторам его ключевых точек
База дескрипторов каждой ключевой
Структурное распознавание изображения по дескрипторам его ключевых точек
База дескрипторов каждой ключевой
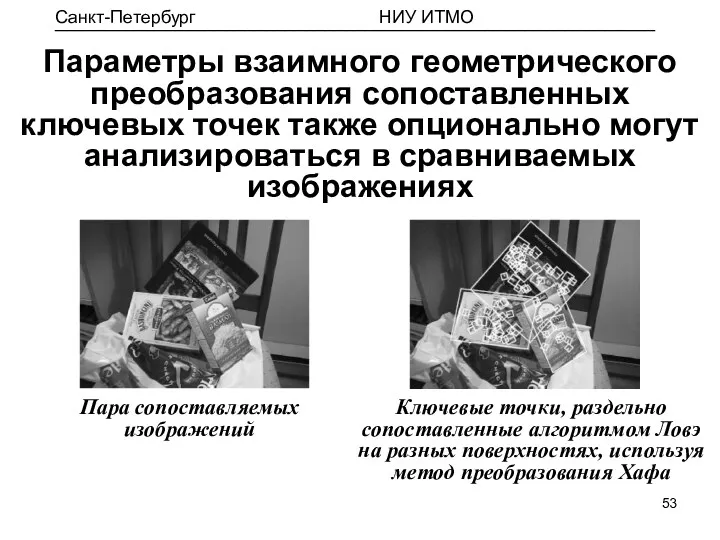
Параметры взаимного геометрического преобразования сопоставленных ключевых точек также опционально могут анализироваться
Параметры взаимного геометрического преобразования сопоставленных ключевых точек также опционально могут анализироваться

Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT
Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT

Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT
Примеры сопоставленных ключевых точек, представленные автором алгоритма SIFT
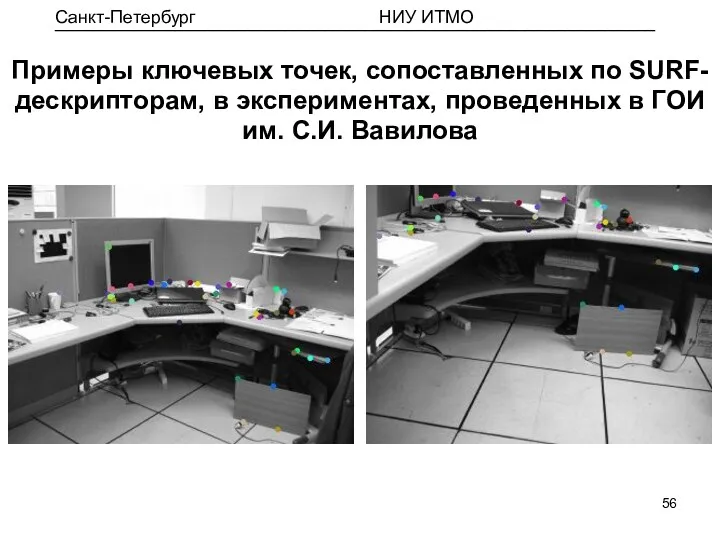
Примеры ключевых точек, сопоставленных по SURF-дескрипторам, в экспериментах, проведенных в ГОИ
Примеры ключевых точек, сопоставленных по SURF-дескрипторам, в экспериментах, проведенных в ГОИ

Одна из экспериментальных моделей домашнего робота LG-Electronics с системой зрения, разработанной
Одна из экспериментальных моделей домашнего робота LG-Electronics с системой зрения, разработанной
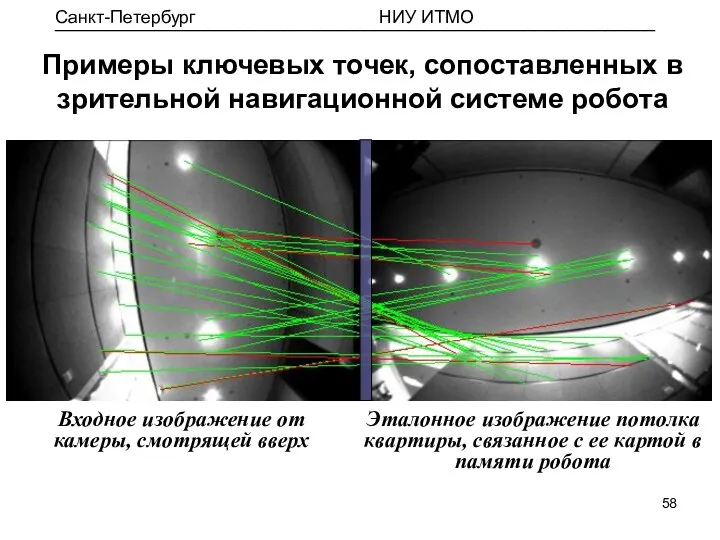
Примеры ключевых точек, сопоставленных в зрительной навигационной системе робота
Входное изображение от
Примеры ключевых точек, сопоставленных в зрительной навигационной системе робота
Входное изображение от

Разработано множество других методов выбора и описания ключевых точек, вот примеры
Разработано множество других методов выбора и описания ключевых точек, вот примеры
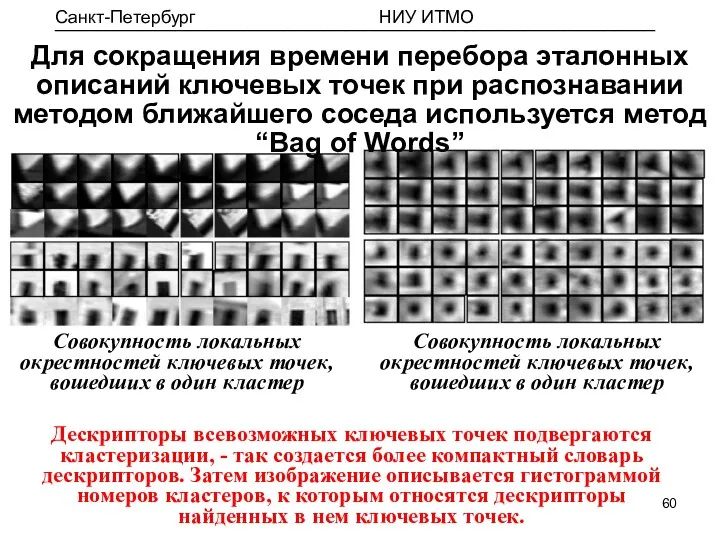
Для сокращения времени перебора эталонных описаний ключевых точек при распознавании методом
Для сокращения времени перебора эталонных описаний ключевых точек при распознавании методом
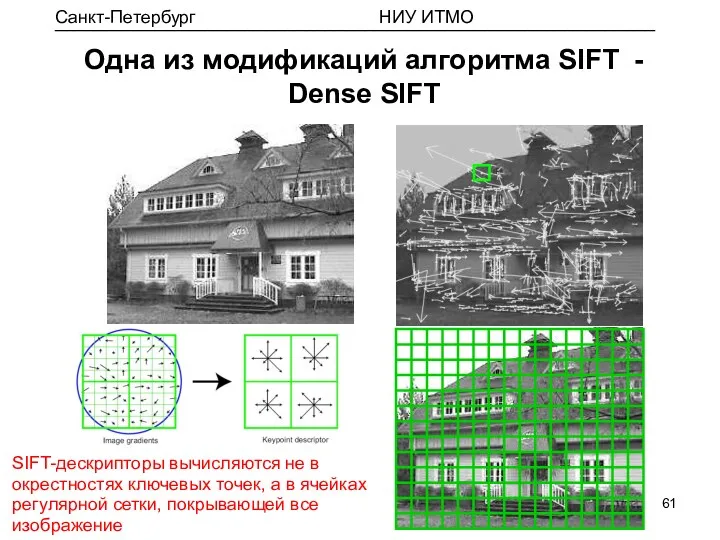
Одна из модификаций алгоритма SIFT - Dense SIFT
SIFT-дескрипторы вычисляются не в
Одна из модификаций алгоритма SIFT - Dense SIFT
SIFT-дескрипторы вычисляются не в
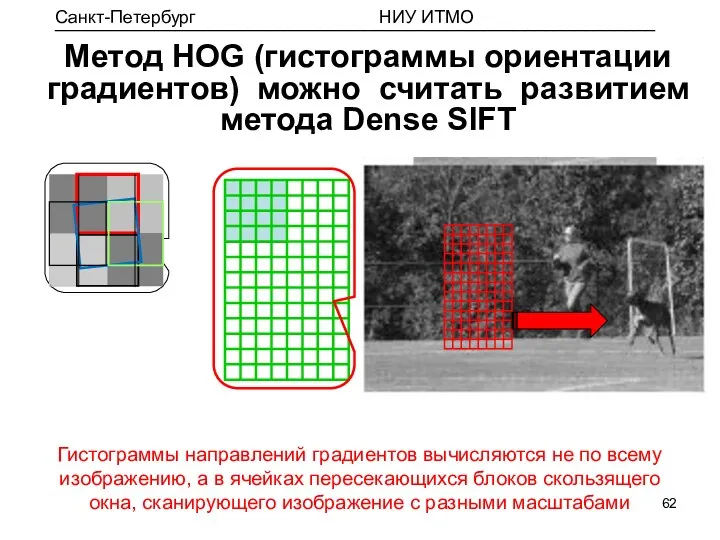
Метод HOG (гистограммы ориентации градиентов) можно считать развитием метода Dense SIFT
Метод HOG (гистограммы ориентации градиентов) можно считать развитием метода Dense SIFT

Метод HOG (гистограммы ориентации градиентов)
Положительные примеры
Отрицательные примеры
Гистограммы градиентов
Обучение классификатора SVM
Распознавание
a b
Метод HOG (гистограммы ориентации градиентов)
Положительные примеры
Отрицательные примеры
Гистограммы градиентов
Обучение классификатора SVM
Распознавание
a b
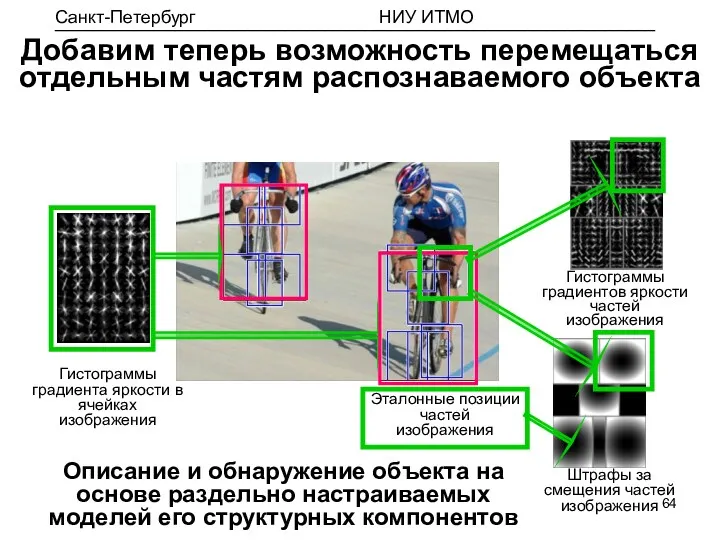
Добавим теперь возможность перемещаться отдельным частям распознаваемого объекта
Описание и обнаружение объекта
Добавим теперь возможность перемещаться отдельным частям распознаваемого объекта
Описание и обнаружение объекта
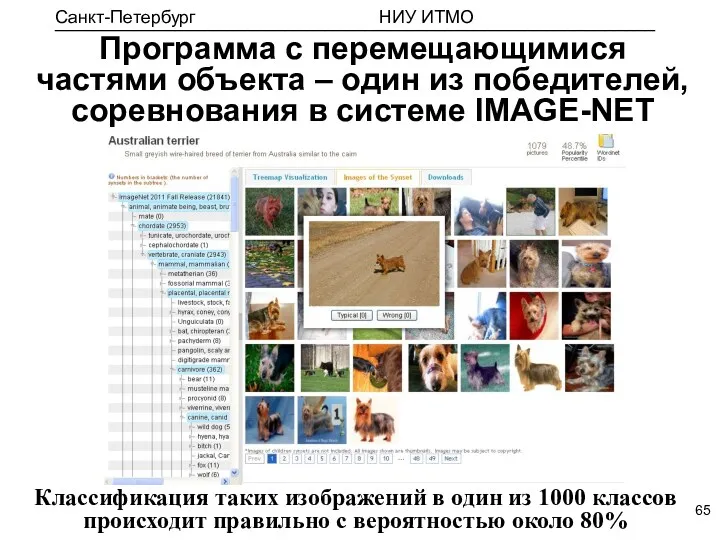
Программа с перемещающимися частями объекта – один из победителей, соревнования в
Программа с перемещающимися частями объекта – один из победителей, соревнования в

Применяемый алгоритм обеспечивает чрезвычайно надежную классификацию, но слишком вычислительно сложен
Применяемый алгоритм обеспечивает чрезвычайно надежную классификацию, но слишком вычислительно сложен
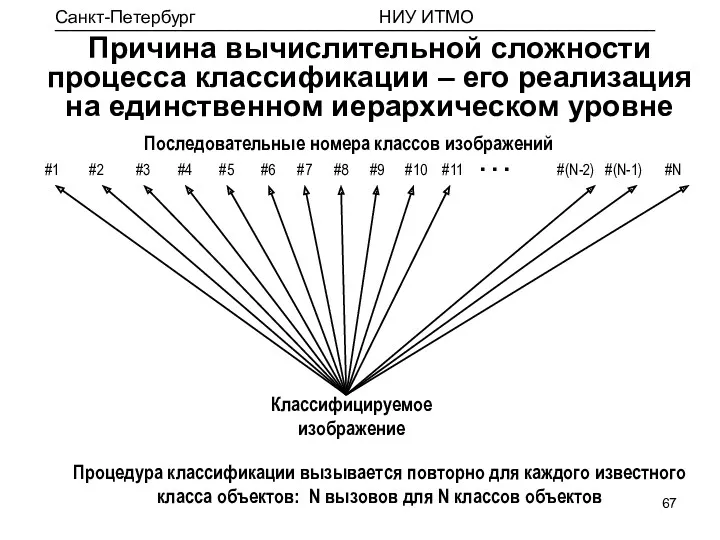
Причина вычислительной сложности процесса классификации – его реализация на единственном иерархическом
Причина вычислительной сложности процесса классификации – его реализация на единственном иерархическом
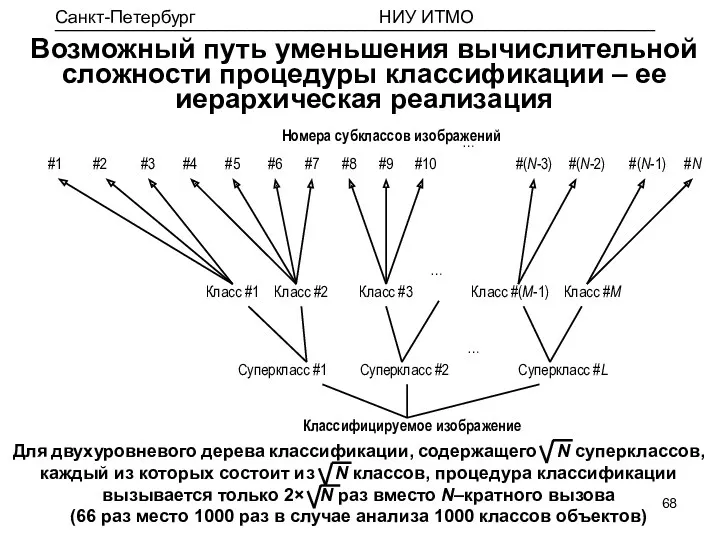
Возможный путь уменьшения вычислительной сложности процедуры классификации – ее иерархическая реализация
Возможный путь уменьшения вычислительной сложности процедуры классификации – ее иерархическая реализация
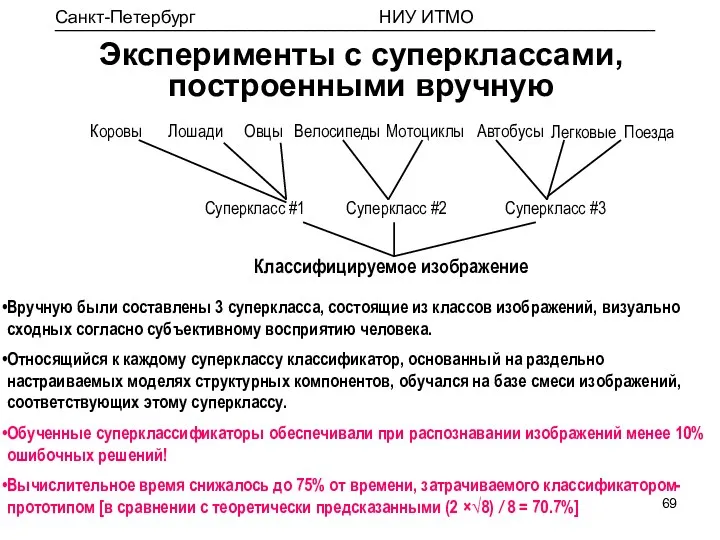
Вручную были составлены 3 суперкласса, состоящие из классов изображений, визуально сходных
Вручную были составлены 3 суперкласса, состоящие из классов изображений, визуально сходных

Настройка эталонного описания суперкласса, включающего велосипеды и мотоциклы
Примеры обучающих образов
Ракурс #1
Ракурс
Настройка эталонного описания суперкласса, включающего велосипеды и мотоциклы
Примеры обучающих образов
Ракурс #1
Ракурс

Примеры обучающих образов
Ракурс #1
Ракурс #2
Ракурс #3
Эталонное описание объекта целиком
Эталонные описания частей
Эталонные
Примеры обучающих образов
Ракурс #1
Ракурс #2
Ракурс #3
Эталонное описание объекта целиком
Эталонные описания частей
Эталонные

Примеры обучающих образов
Ракурс #1
Ракурс #2
Ракурс #3
Эталонное описание объекта целиком
Эталонные описания частей
Эталонные
Примеры обучающих образов
Ракурс #1
Ракурс #2
Ракурс #3
Эталонное описание объекта целиком
Эталонные описания частей
Эталонные
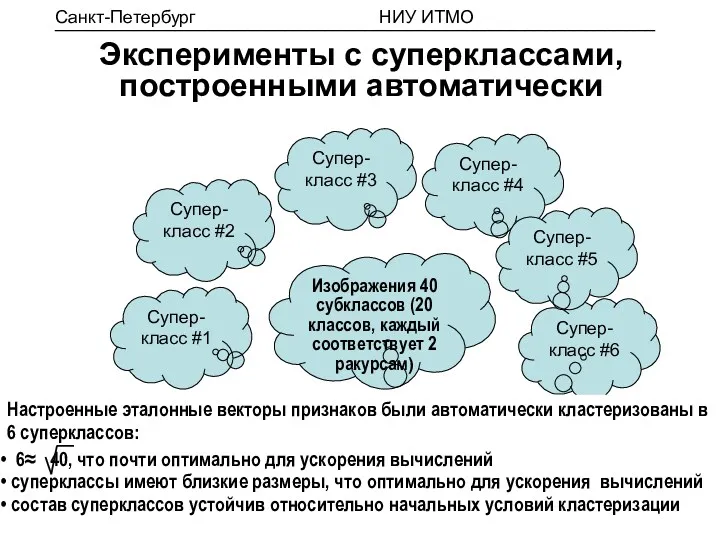
Настроенные эталонные векторы признаков были автоматически кластеризованы в 6 суперклассов:
6≈
Настроенные эталонные векторы признаков были автоматически кластеризованы в 6 суперклассов:
6≈
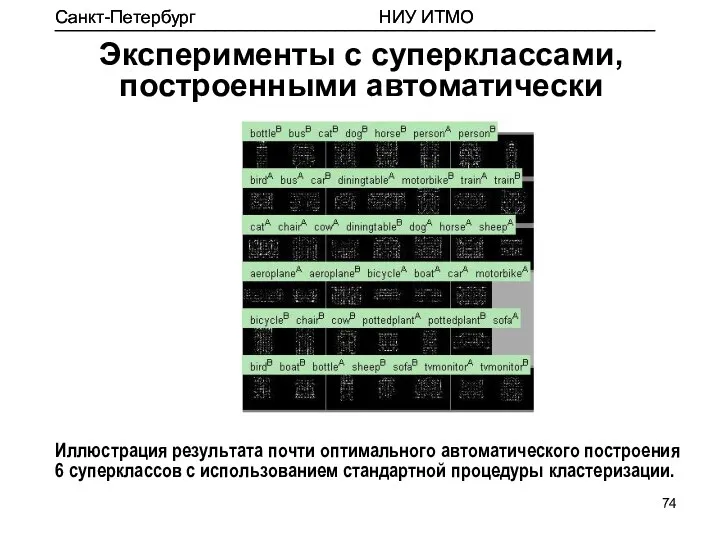
Иллюстрация результата почти оптимального автоматического построения 6 суперклассов с использованием стандартной
Иллюстрация результата почти оптимального автоматического построения 6 суперклассов с использованием стандартной

Санкт-Петербург НИУ ИТМО
____________________________________________________________
Почему бы не определять количество и частей их положения полностью
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Почему бы не определять количество и частей их положения полностью

Санкт-Петербург НИУ ИТМО
____________________________________________________________
Сеть вычисляет коэффициенты корреляции фрагментов изображений с усредненными локальными эталонами
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Сеть вычисляет коэффициенты корреляции фрагментов изображений с усредненными локальными эталонами
При решении современных практически важных проблем необходимо переходить от распознавания 2D
При решении современных практически важных проблем необходимо переходить от распознавания 2D
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Построение HOG-дескрипторов для нескольких ракурсов
Разделение ключевых точек разных поверхностей с
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Построение HOG-дескрипторов для нескольких ракурсов
Разделение ключевых точек разных поверхностей с
Необходимо научиться более явно и полно анализировать и использовать доступную информацию
Необходимо научиться более явно и полно анализировать и использовать доступную информацию

У нас есть идеи, как анализировать изображения 3D сцен в алфавите
У нас есть идеи, как анализировать изображения 3D сцен в алфавите

Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5%
Результат
Сопоставляемые портреты, для которых вычисленный показатель структурного сходства составил 5%
Результат
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Переход от 2D описаний к 3D описаниям на основе обобщенных
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Переход от 2D описаний к 3D описаниям на основе обобщенных

Санкт-Петербург НИУ ИТМО
____________________________________________________________
Использование 3D метрики вместо 2D метрики
Использование 3D угловой меры вместо
Санкт-Петербург НИУ ИТМО
____________________________________________________________
Использование 3D метрики вместо 2D метрики
Использование 3D угловой меры вместо

Возможно, кто-то из Вас захочет принять участие в наших исследованиях или
Возможно, кто-то из Вас захочет принять участие в наших исследованиях или
 Естественный рост и воспроизводство населения
Естественный рост и воспроизводство населения Комическое и трагическое в рассказах Антона Павловича Чехова
Комическое и трагическое в рассказах Антона Павловича Чехова Конспект урока труда во 2 классе с презентацией.
Конспект урока труда во 2 классе с презентацией. Презентация Группа Солнышко
Презентация Группа Солнышко 17.04. Літ. чит. М. Трублаїні Шоколад
17.04. Літ. чит. М. Трублаїні Шоколад Заттар алмасуына кіріспе. Заттардың алмасуын оқып үйренуінің тәсілдері. Изотопты тәсілдер
Заттар алмасуына кіріспе. Заттардың алмасуын оқып үйренуінің тәсілдері. Изотопты тәсілдер Elaborarea sistemelor operationale
Elaborarea sistemelor operationale Лирика А.С. Пушкина
Лирика А.С. Пушкина Психологический комфорт на уроке
Психологический комфорт на уроке Российский студенческий отряд в Крыму
Российский студенческий отряд в Крыму Список литературы: банковское дело
Список литературы: банковское дело Подвижной состав автомобильного транспорта
Подвижной состав автомобильного транспорта Обжим витой пары
Обжим витой пары Праздник Пасхи
Праздник Пасхи 567523a3562239fa4042597efb6ceaea
567523a3562239fa4042597efb6ceaea Жанры китайской живописи
Жанры китайской живописи Правила вежливости. 2 часть
Правила вежливости. 2 часть Конспект образовательной деятельности по экологии в средней группе с использованием ИКТ на тему: Берегите лес
Конспект образовательной деятельности по экологии в средней группе с использованием ИКТ на тему: Берегите лес Конкурс детского рисунка на тему Символы Олимпиады. Зимние виды спорта.
Конкурс детского рисунка на тему Символы Олимпиады. Зимние виды спорта. Материаловедение. Цветные металлы и сплавы
Материаловедение. Цветные металлы и сплавы Дін және Жастар
Дін және Жастар Облік витрат і виходу продукції рослинництва
Облік витрат і виходу продукції рослинництва Гексозомонофосфатный путь. Пентозофосфатный путь. Тема 7
Гексозомонофосфатный путь. Пентозофосфатный путь. Тема 7 Книжная графика. Часть вторая. Конструкция книги
Книжная графика. Часть вторая. Конструкция книги Будущее робототехники. История появления и развития, предназначение и перспективы робототехники
Будущее робототехники. История появления и развития, предназначение и перспективы робототехники Луганщина накануне и в годы Первой мировой войны
Луганщина накануне и в годы Первой мировой войны Буллинг в подростковой среде
Буллинг в подростковой среде Имин хәрәкәттә-бәрәкәт
Имин хәрәкәттә-бәрәкәт