- Автоматизація процесу виробництва яблучного соку освітленого

Содержание
- 2. Виробництво соків відіграє важливу роль у житті нашого населення та економіки країни. Овочеві соки багаті на
- 3. Технологічна схема процесу виробництва яблучного соку освітленого
- 4. Схема автоматизації процесу виробництва яблучного соку освітленого
- 5. Для вирішення поставленої мети автоматизації процесу виробництва яблучного соку освітленого, необхідно застосування наступних контурів регулювання та
- 6. Контури контролю: маси яблук, що поступають на виробництво; витрат пари та холодної води, розчину пектолітичного препарату
- 7. У даному проєкті розроблена автоматизована система на базі контролера GE Fanuc Series 90-30 CPU 363
- 8. Також використовується наступні прилади автоматизації: Термометр опору ТС-1187-50М.400-В Рівнемір буйковий Proservo NMS83 Датчик тиску Danfoss MBS1750
- 9. Схема з'єднань контуру регулювання температури
- 10. Лістинг програми користувача для ПІД-регулятора для контуру регулювання температури контролера GE Fanuk ser 90-30 CPU 363
- 11. Графіки збурення та експериментальної перехідної характеристики Згладжені графіки вихідної величини У даному проєкті були проведені дослідження
- 12. Результати апроксимації Апроксимація моделлю 1-го порядку з фіксованим запізненням Апроксимація моделлю 2-го порядку з фіксованим запізненням
- 13. Розрахунок оптимальних параметрів настройки регулятору Контур управління на мові візуального програмування Simulink Оптимізація за критерієм ІМП
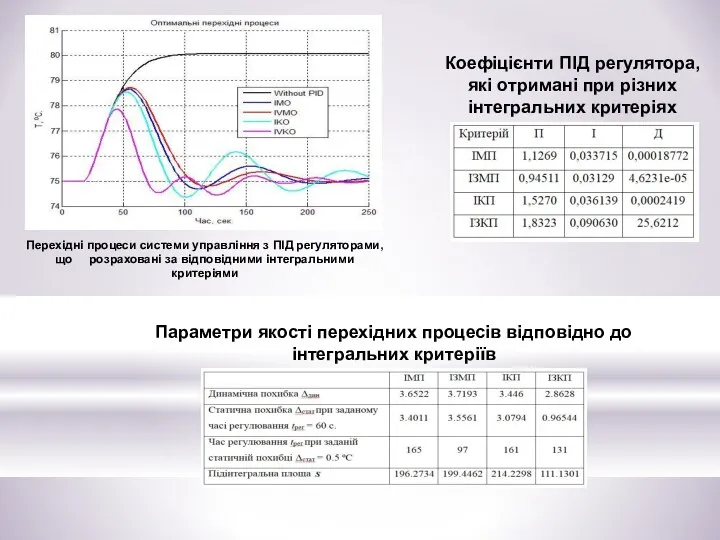
- 14. Перехідні процеси системи управління з ПІД регуляторами, що розраховані за відповідними інтегральними критеріями Коефіцієнти ПІД регулятора,
- 15. Результати проведених розрахунків складаємо калькуляцію собівартості НДР У проєкті були розглянуті питання охорони праці, навколишнього середовища.
- 17. Скачать презентацию

Виробництво соків відіграє важливу роль у житті нашого населення та економіки
Виробництво соків відіграє важливу роль у житті нашого населення та економіки

Технологічна схема процесу виробництва яблучного соку освітленого
Технологічна схема процесу виробництва яблучного соку освітленого
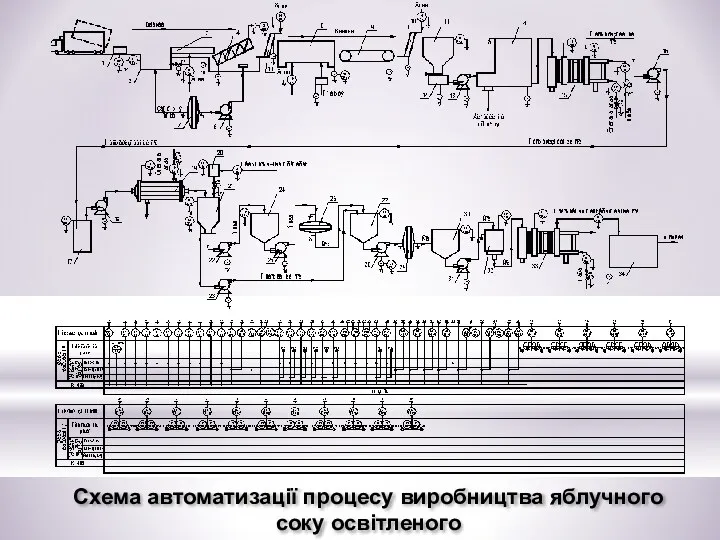
Схема автоматизації процесу виробництва яблучного соку освітленого
Схема автоматизації процесу виробництва яблучного соку освітленого
Для вирішення поставленої мети автоматизації процесу виробництва яблучного соку освітленого, необхідно
Для вирішення поставленої мети автоматизації процесу виробництва яблучного соку освітленого, необхідно

Контури контролю:
маси яблук, що поступають на виробництво;
витрат пари та холодної води,
Контури контролю:
маси яблук, що поступають на виробництво;
витрат пари та холодної води,

У даному проєкті розроблена автоматизована система на базі контролера GE Fanuc
У даному проєкті розроблена автоматизована система на базі контролера GE Fanuc
Також використовується наступні прилади автоматизації:
Термометр опору ТС-1187-50М.400-В
Рівнемір буйковий Proservo NMS83
Також використовується наступні прилади автоматизації:
Термометр опору ТС-1187-50М.400-В
Рівнемір буйковий Proservo NMS83
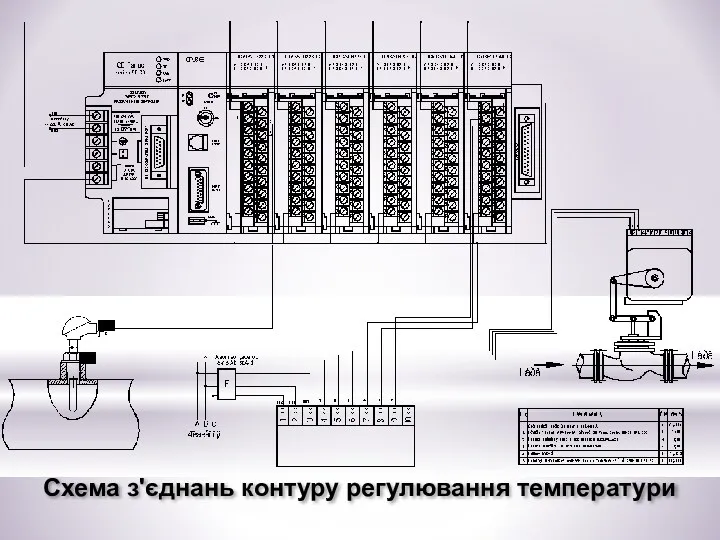
Схема з'єднань контуру регулювання температури
Схема з'єднань контуру регулювання температури
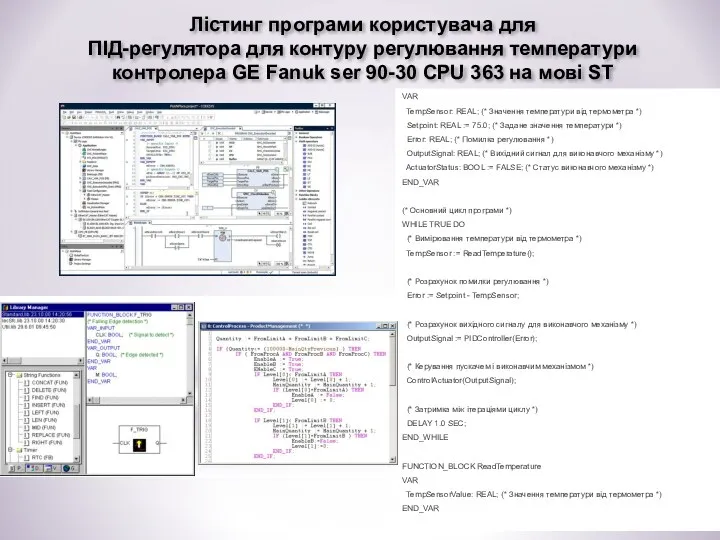
Лістинг програми користувача для
ПІД-регулятора для контуру регулювання температури контролера GE
Лістинг програми користувача для
ПІД-регулятора для контуру регулювання температури контролера GE
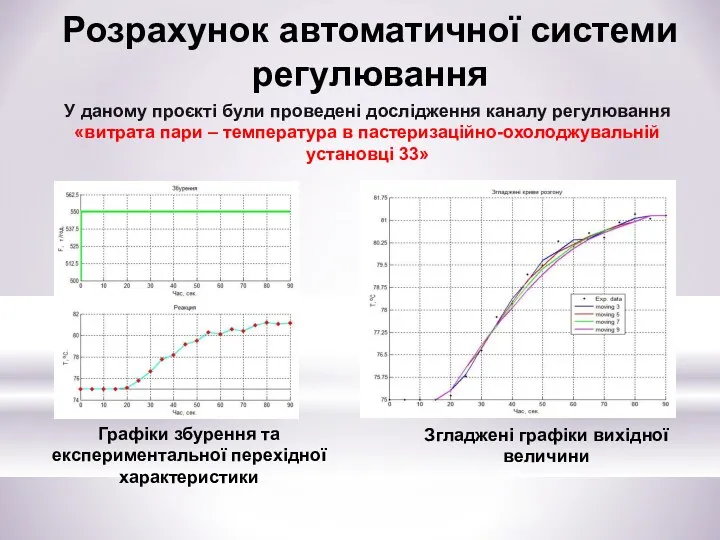
Графіки збурення та експериментальної перехідної характеристики
Згладжені графіки вихідної величини
У даному проєкті
Графіки збурення та експериментальної перехідної характеристики
Згладжені графіки вихідної величини
У даному проєкті
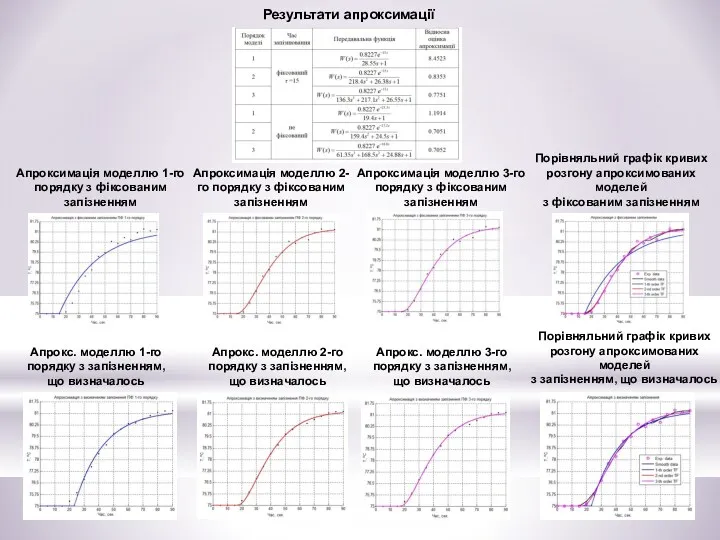
Результати апроксимації
Апроксимація моделлю 1-го порядку з фіксованим запізненням
Апроксимація моделлю 2-го порядку
Результати апроксимації
Апроксимація моделлю 1-го порядку з фіксованим запізненням
Апроксимація моделлю 2-го порядку
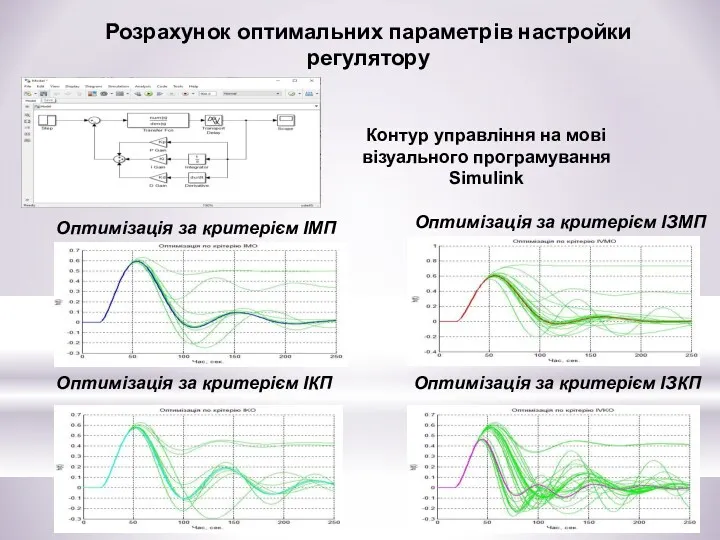
Розрахунок оптимальних параметрів настройки
регулятору
Контур управління на мові візуального програмування Simulink
Оптимізація
Розрахунок оптимальних параметрів настройки
регулятору
Контур управління на мові візуального програмування Simulink
Оптимізація
Перехідні процеси системи управління з ПІД регуляторами, що розраховані за відповідними
Перехідні процеси системи управління з ПІД регуляторами, що розраховані за відповідними
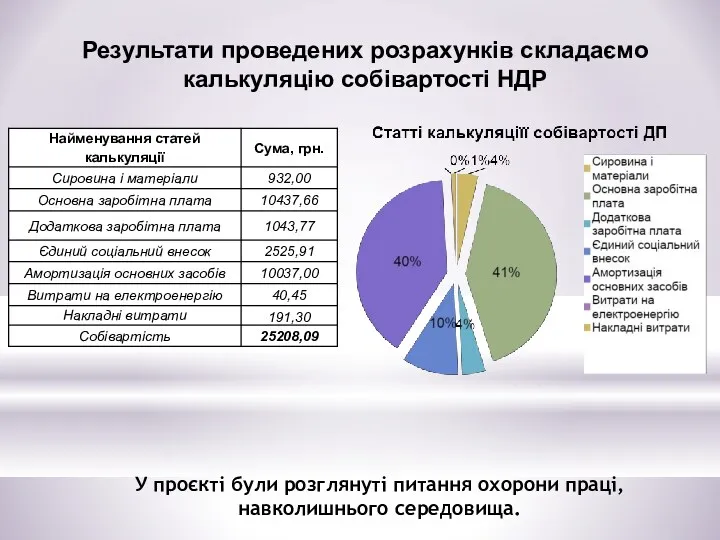
Результати проведених розрахунків складаємо калькуляцію собівартості НДР
У проєкті були розглянуті питання
Результати проведених розрахунків складаємо калькуляцію собівартості НДР
У проєкті були розглянуті питання
 Конференция
Конференция Рынок ценных бумаг
Рынок ценных бумаг Кома жағдайлардың ажырату диагностикасы
Кома жағдайлардың ажырату диагностикасы Food idioms
Food idioms OVB Event
OVB Event Внеклассное мероприятие В гостях у её Величества - королевы Электричества
Внеклассное мероприятие В гостях у её Величества - королевы Электричества Паллиативный сестринский уход при кожных проявлениях. Основные подходы к терапии болевого синдрома. №5
Паллиативный сестринский уход при кожных проявлениях. Основные подходы к терапии болевого синдрома. №5 2615Імунофлуорисцентний експрес аналізатор LS-1100
2615Імунофлуорисцентний експрес аналізатор LS-1100 Конденсационные устройства турбин
Конденсационные устройства турбин Родительское собрание первый раз в первый класс
Родительское собрание первый раз в первый класс Иудейская культура: история и современность. Тема 7
Иудейская культура: история и современность. Тема 7 Храмы Крыма и их история
Храмы Крыма и их история Мастер-класс Оригами для дошкольников в условиях внедрения ФГОС ДО (презентация+текст)
Мастер-класс Оригами для дошкольников в условиях внедрения ФГОС ДО (презентация+текст) Ядро хромосомы. Жизненный цикл клеток. Деление клеток
Ядро хромосомы. Жизненный цикл клеток. Деление клеток Шаблон Фракталы-19
Шаблон Фракталы-19 Исследовательская работа Ядовитые комнатные растения и их влияние на живые организмы
Исследовательская работа Ядовитые комнатные растения и их влияние на живые организмы Каждой пичужке кормушка
Каждой пичужке кормушка Доброе дело
Доброе дело Шитикова В.А
Шитикова В.А Разработка реестра ветеранов шахтерского труда с использованием языка веб-программирования PHP и базы данных MySQL
Разработка реестра ветеранов шахтерского труда с использованием языка веб-программирования PHP и базы данных MySQL Социальное партнерство школы с различными структурами
Социальное партнерство школы с различными структурами Искусство. Человек и общество
Искусство. Человек и общество Профилактика суицидальных тенденций среди несовершеннолетних в условиях урочной и внеурочной деятельности
Профилактика суицидальных тенденций среди несовершеннолетних в условиях урочной и внеурочной деятельности Общение в сети Интернет
Общение в сети Интернет Диагностический материал для обследования фонематического восприятия у дошкольников.Слова-паронимы Диск
Диагностический материал для обследования фонематического восприятия у дошкольников.Слова-паронимы Диск Банкет с частичным обслуживанием
Банкет с частичным обслуживанием Презентация Мы помним, мы гордимся!
Презентация Мы помним, мы гордимся! Отчет о финансовых результатах и бухгалтерские процедуры по его составлению
Отчет о финансовых результатах и бухгалтерские процедуры по его составлению