- Дальность обнаружения и зоны видимости РЛС. Лекция №5

Содержание
- 2. Тема 3 : «Основы статистической теории обнаружения радиолокационных сигналов» Лекция 10: «Дальность обнаружения и зоны видимости
- 3. Модель некогерентного сигнала. Отношение правдоподобия. Некогерентное накопление сигнала. Анализ качества некогерентного накопления. Цифровые обнаружители. Вопросы предыдущей
- 4. Отношение правдоподобия 3
- 5. Для сигнала со случайной начальной фазой Для сигнала (пачки) с независимыми случайными начальными фазами и независимыми
- 6. Дальность обнаружения РЛС 2. Влияние Земли и атмосферы на дальность действия РЛС 3. Зоны видимости РЛС
- 7. Основная: 6
- 8. Дальность обнаружения РЛС 7
- 9. Одной из важнейших характеристик РЛС, определяющих её боевые возможности, является дальность действия. Дальность действия показывает максимальное
- 10. Максимальная дальность обнаружения цели (дальность обнаружения) есть максимальное расстояние между РЛС и целью, при котором обеспечивается
- 11. При излучении зондирующих сигналов РЛС создает в месте расположения цели плотность потока мощности где Р -
- 12. Мощность принимаемого сигнала Рпр на согласованной нагрузке на выходе антенны пропорциональна эффективной площади приемной антенны :
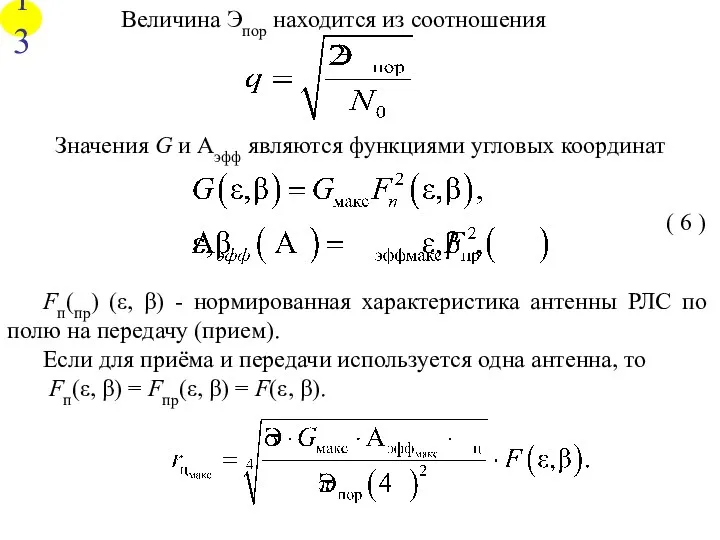
- 13. Заменим в (4) Эпр на пороговую Эпор (или минимально необходимую Эпр мин), которая требуется для обнаружения
- 14. Величина Эпор находится из соотношения Значения G и Аэфф являются функциями угловых координат ( 6 )
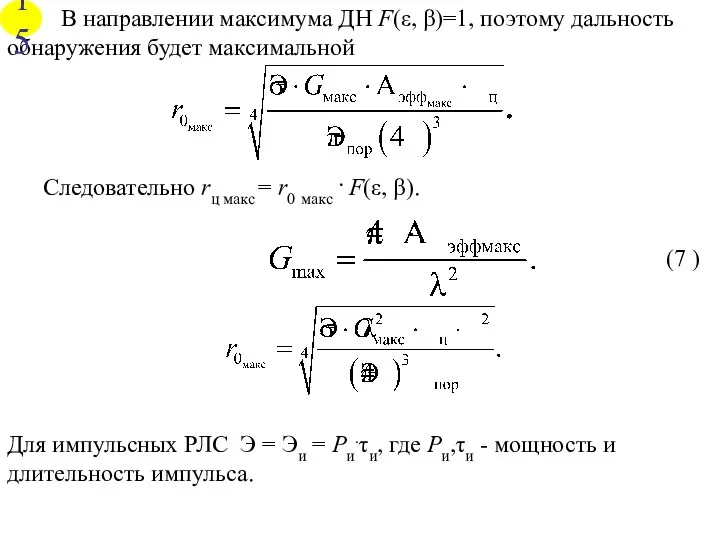
- 15. В направлении максимума ДН F(ε, β)=1, поэтому дальность обнаружения будет максимальной Следовательно rц макс = r0
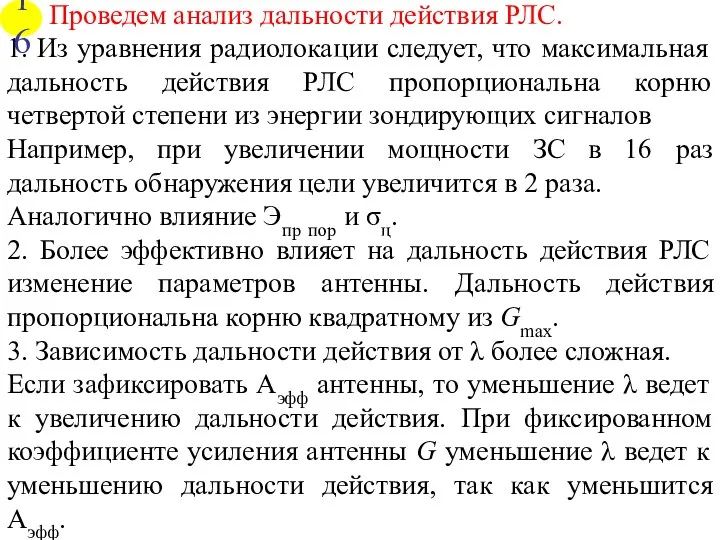
- 16. Проведем анализ дальности действия РЛС. 1. Из уравнения радиолокации следует, что максимальная дальность действия РЛС пропорциональна
- 17. Влияние Земли и атмосферы на дальность действия РЛС 17
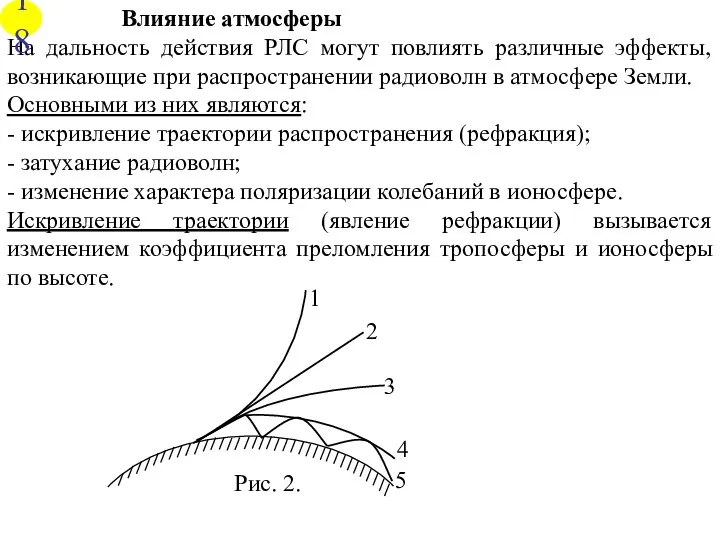
- 18. Влияние атмосферы На дальность действия РЛС могут повлиять различные эффекты, возникающие при распространении радиоволн в атмосфере
- 19. Характер и величина рефракции зависят от вертикального градиента коэффициента преломления dn/dн (рис. 2). При dn/dн >
- 20. При бόльшем радиусе кривизны луча (кривая 5) отраженный от земли луч может вновь многократно искривиться и
- 21. Сверхрефракция может возникнуть также над пустынями и полупустынями. Однако она не носит регулярного характера и в
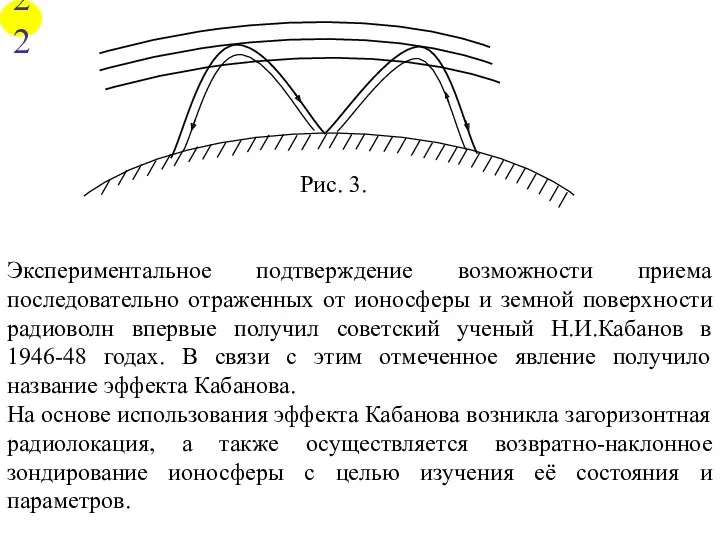
- 22. Экспериментальное подтверждение возможности приема последовательно отраженных от ионосферы и земной поверхности радиоволн впервые получил советский ученый
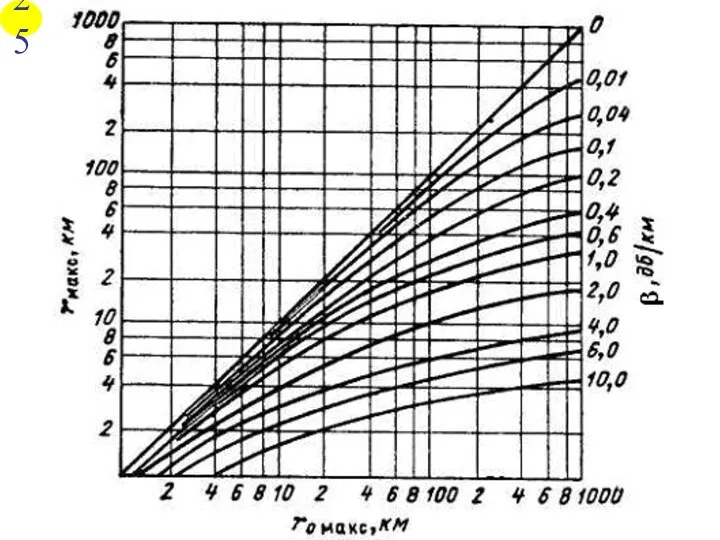
- 23. Затухание радиоволн в атмосфере обусловлено поглощением их энергии свободными молекулами кислорода и водяного пара, а также
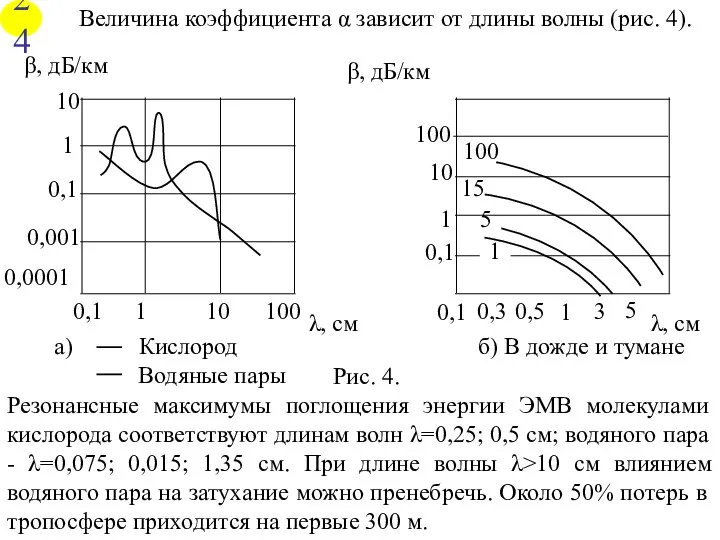
- 24. Величина коэффициента α зависит от длины волны (рис. 4). Резонансные максимумы поглощения энергии ЭМВ молекулами кислорода
- 25. 25
- 26. Физика процесса поглощения радиоволн в ионосфере состоит в том, что свободные электроны, сталкиваясь с тяжелыми частицами,
- 27. Таким образом, изменение состояния атмосферы приводит к изменению условий распространения радиоволн и изменению возможностей РЛС по
- 28. Дальность прямой видимости РЛС равна: Влияние Земли Влияние Земли на дальность действия РЛС связано с кривизной
- 29. Кроме того, сферичность Земли требует коррекции соотношения для вычисления высоты цели. Если не учитывать сферичность земной
- 30. Рис. 6. M h 2h sinε -ε ε F(ε) ц∙ где Ф(ε) - множитель Земли, учитывающий
- 31. - комплексный коэффициент отражения; - сдвиг фазы колебаний отраженной волны по отношению к прямой волне. Модуль
- 32. Из полученного соотношения видно, что множитель Земли носит лепестковый характер (рис. 7). ε Влияние Земли на
- 33. 3. Зоны видимости РЛС 33
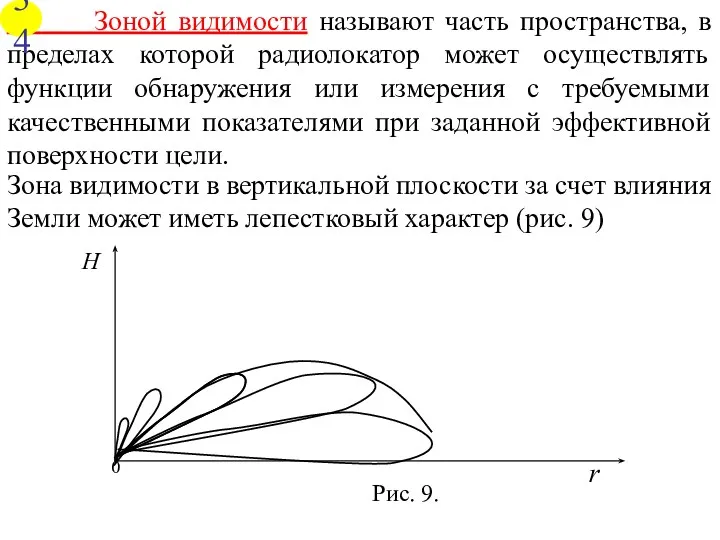
- 34. Зона видимости в вертикальной плоскости за счет влияния Земли может иметь лепестковый характер (рис. 9) Зоной
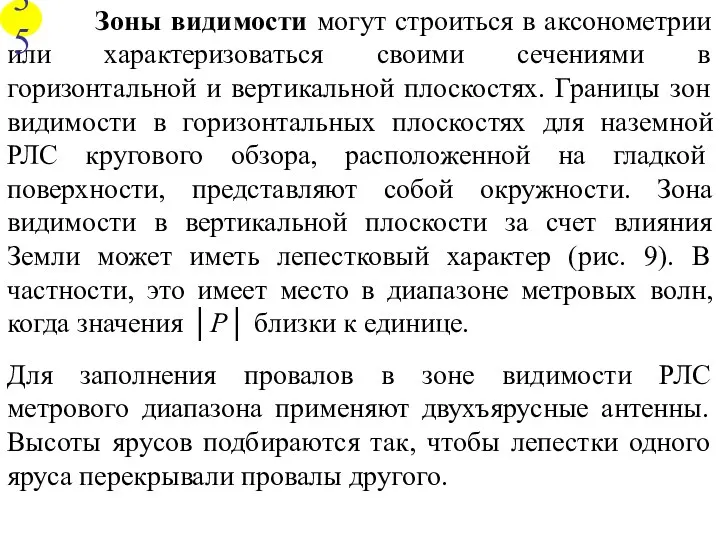
- 35. Зоны видимости могут строиться в аксонометрии или характеризоваться своими сечениями в горизонтальной и вертикальной плоскостях. Границы
- 36. 36
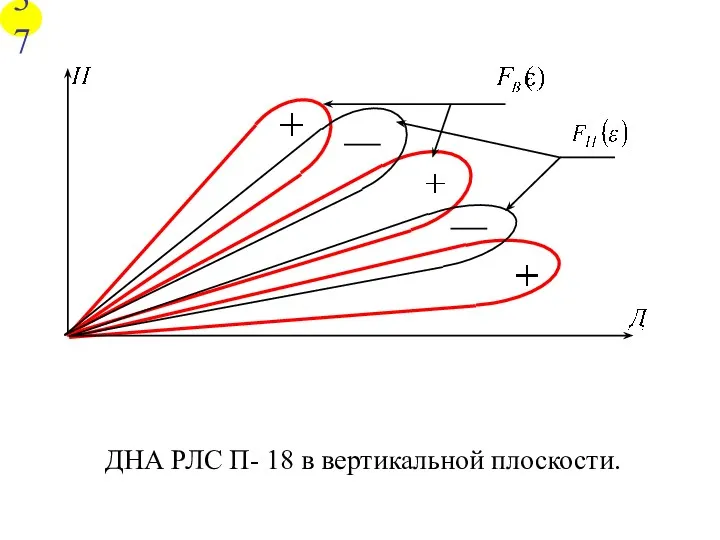
- 37. Для формирования беспровальной зоны обнаружения в РЛС метрового диапазона применяют два метода: а) использование разнесенных по
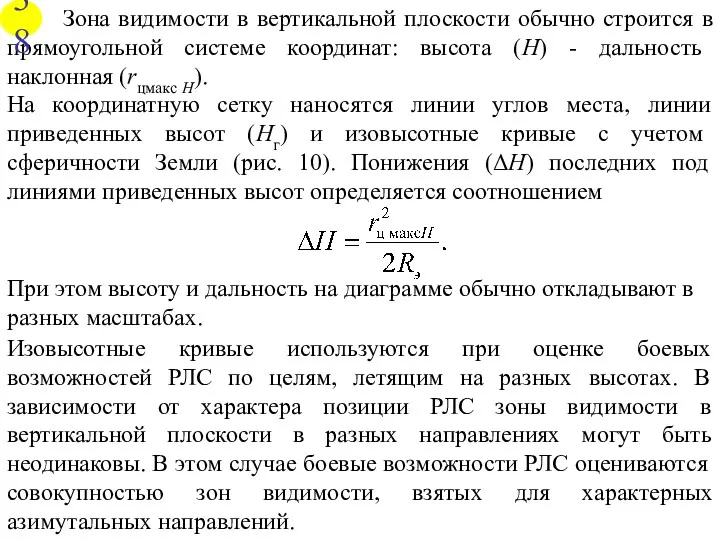
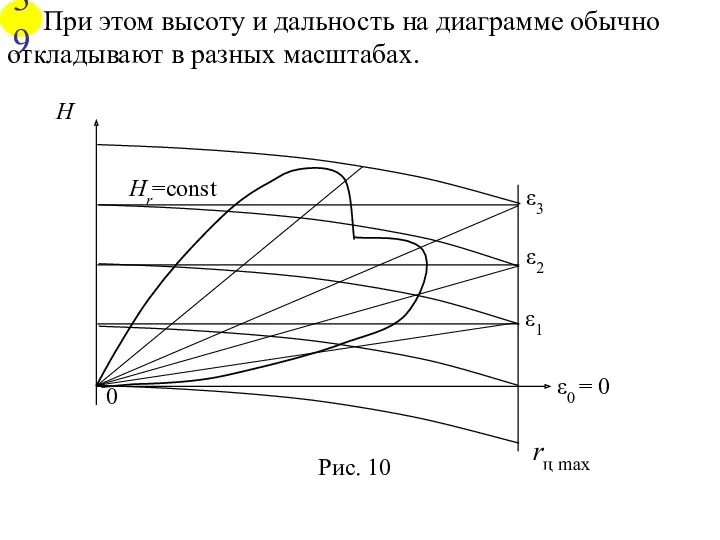
- 38. Зона видимости в вертикальной плоскости обычно строится в прямоугольной системе координат: высота (Н) - дальность наклонная
- 39. При этом высоту и дальность на диаграмме обычно откладывают в разных масштабах. 39
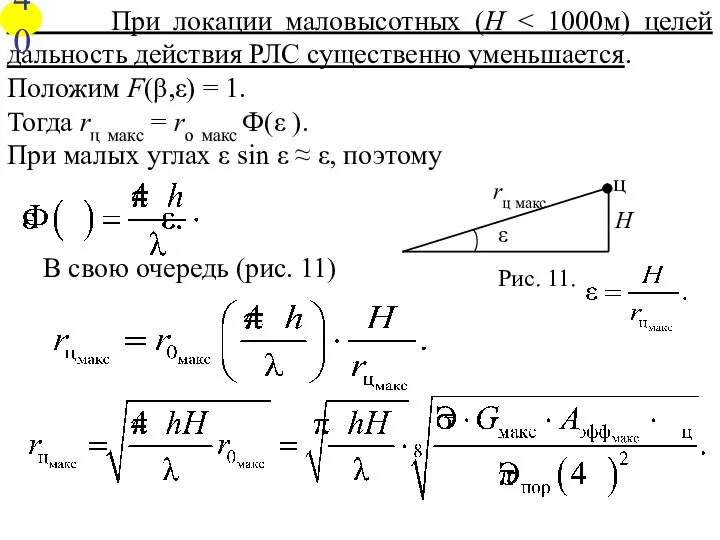
- 40. При локации маловысотных (H Положим F(β,ε) = 1. Тогда rц макс = ro макс Ф(ε ).
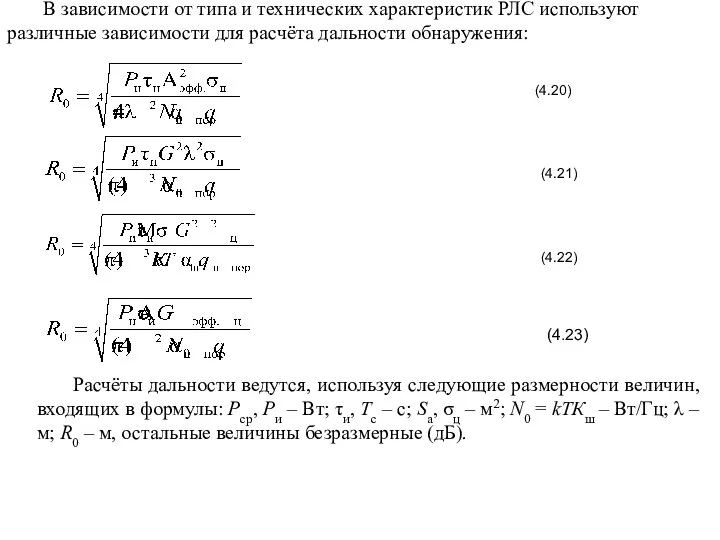
- 41. В зависимости от типа и технических характеристик РЛС используют различные зависимости для расчёта дальности обнаружения: (4.20)
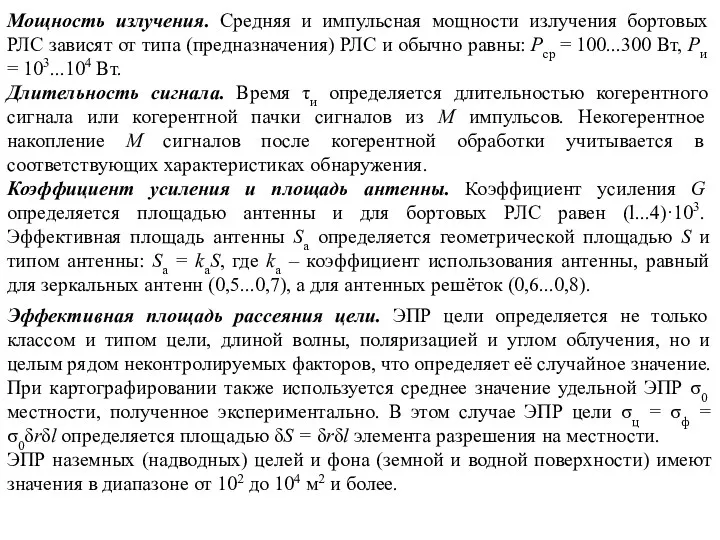
- 42. Мощность излучения. Средняя и импульсная мощности излучения бортовых РЛС зависят от типа (предназначения) РЛС и обычно
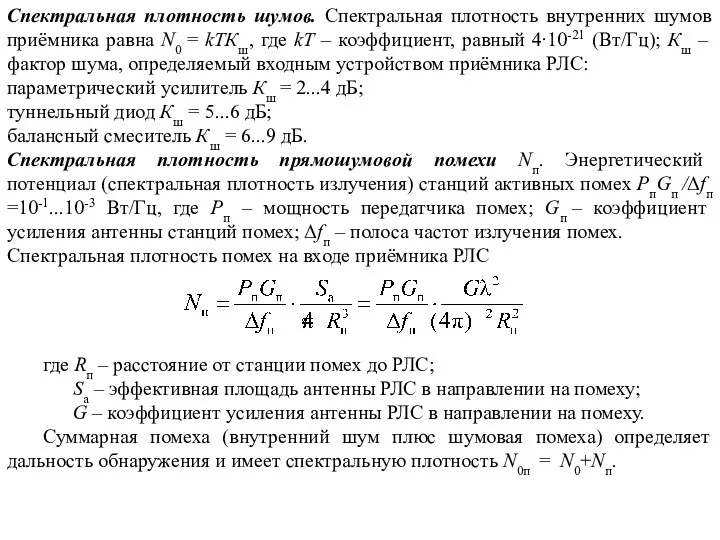
- 43. Спектральная плотность шумов. Спектральная плотность внутренних шумов приёмника равна N0 = kTКш, где kT – коэффициент,
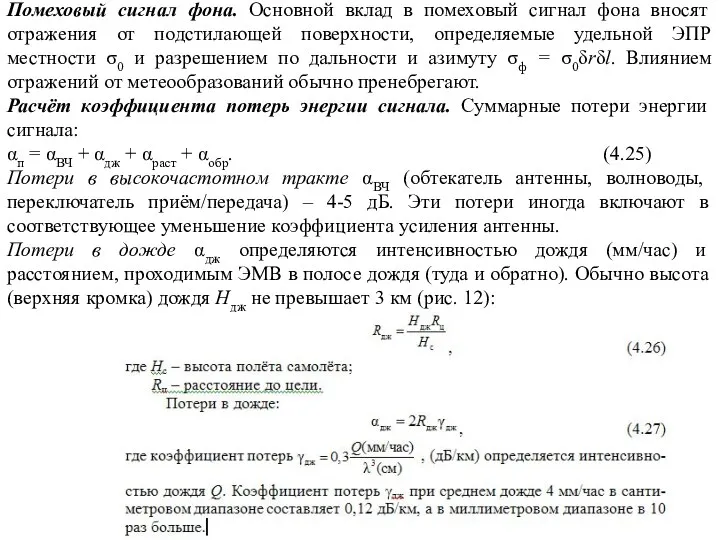
- 44. Помеховый сигнал фона. Основной вклад в помеховый сигнал фона вносят отражения от подстилающей поверхности, определяемые удельной
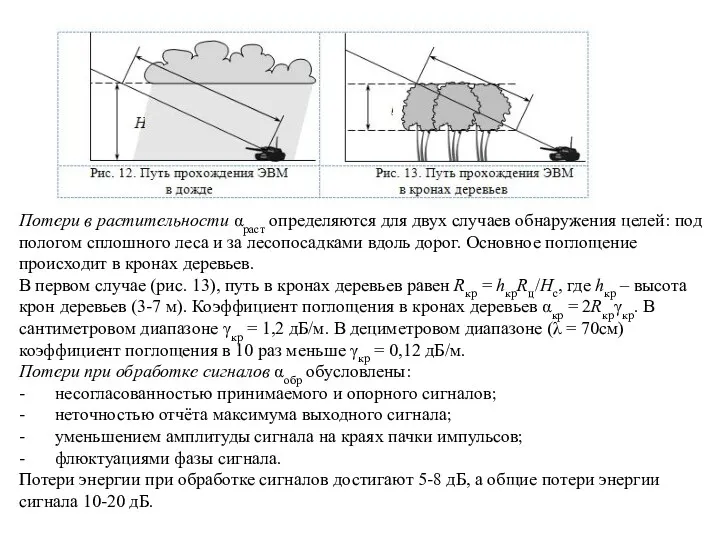
- 45. Потери в растительности αраст определяются для двух случаев обнаружения целей: под пологом сплошного леса и за
- 46. Заключительная часть 1. Дальность действия РЛС существенно увеличивается с ростом мощности передатчика и пороговой чувствительности приемника.
- 47. 41
- 49. Скачать презентацию
Тема 3 : «Основы статистической теории обнаружения радиолокационных сигналов»
Лекция 10: «Дальность
Тема 3 : «Основы статистической теории обнаружения радиолокационных сигналов»
Лекция 10: «Дальность
Модель некогерентного сигнала. Отношение правдоподобия.
Некогерентное накопление сигнала. Анализ качества некогерентного
Модель некогерентного сигнала. Отношение правдоподобия.
Некогерентное накопление сигнала. Анализ качества некогерентного
Отношение правдоподобия
3
Отношение правдоподобия
3
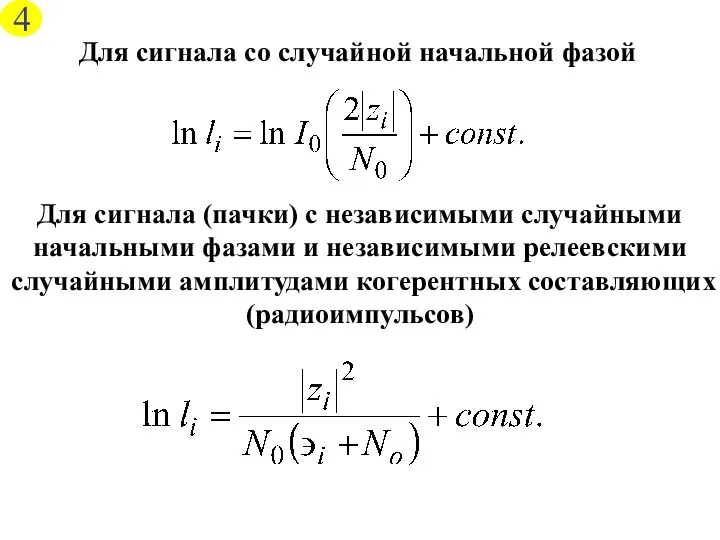
Для сигнала со случайной начальной фазой
Для сигнала (пачки) с независимыми
Для сигнала со случайной начальной фазой
Для сигнала (пачки) с независимыми
Дальность обнаружения РЛС
2. Влияние Земли и атмосферы на дальность действия РЛС
3.
Дальность обнаружения РЛС
2. Влияние Земли и атмосферы на дальность действия РЛС
3.
Основная:
6
Основная:
6
Дальность обнаружения РЛС
7
Дальность обнаружения РЛС
7
Одной из важнейших характеристик РЛС, определяющих её боевые возможности, является дальность
Одной из важнейших характеристик РЛС, определяющих её боевые возможности, является дальность
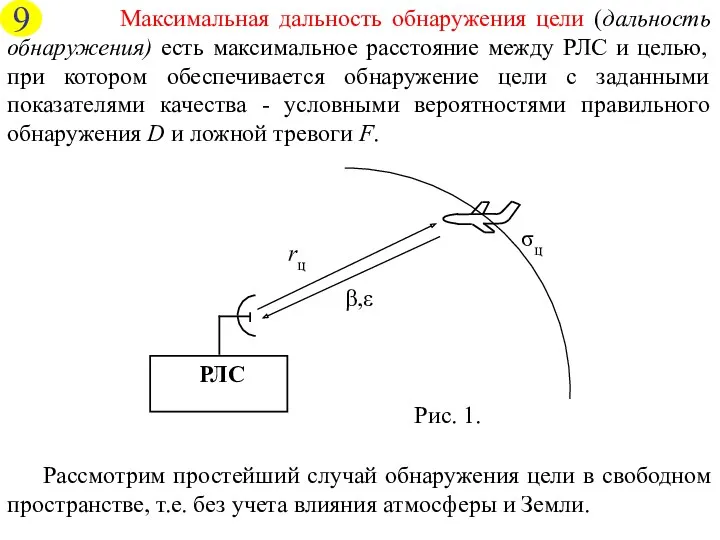
Максимальная дальность обнаружения цели (дальность обнаружения) есть максимальное расстояние между
Максимальная дальность обнаружения цели (дальность обнаружения) есть максимальное расстояние между
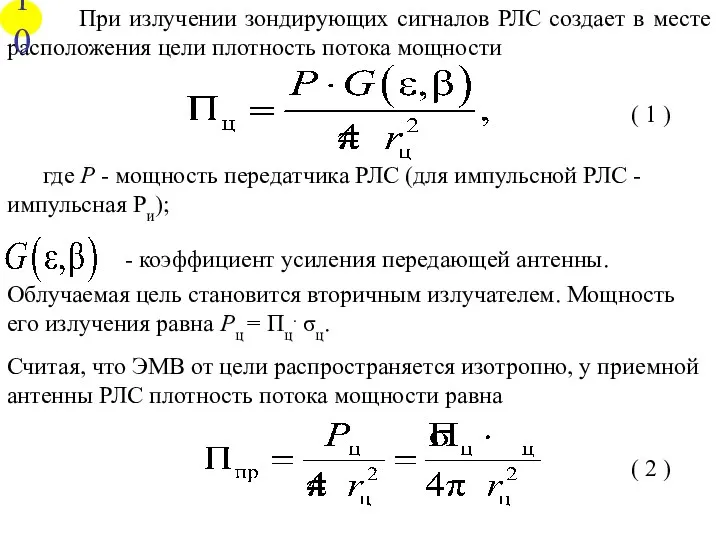
При излучении зондирующих сигналов РЛС создает в месте расположения цели
При излучении зондирующих сигналов РЛС создает в месте расположения цели
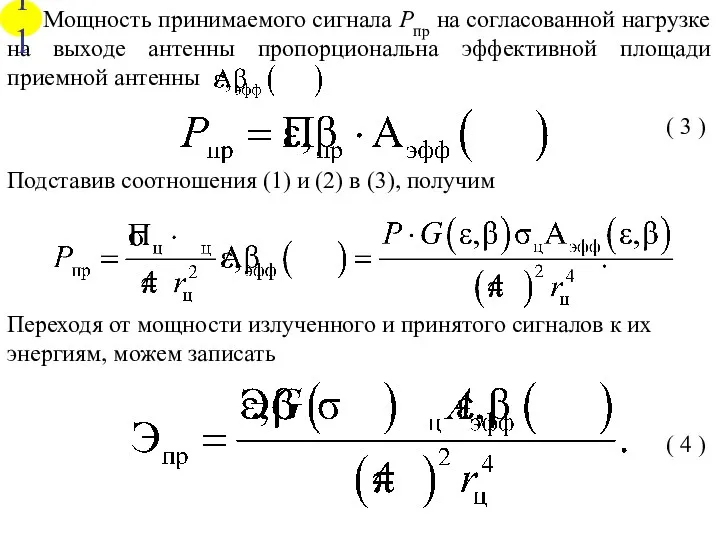
Мощность принимаемого сигнала Рпр на согласованной нагрузке на выходе антенны пропорциональна
Мощность принимаемого сигнала Рпр на согласованной нагрузке на выходе антенны пропорциональна
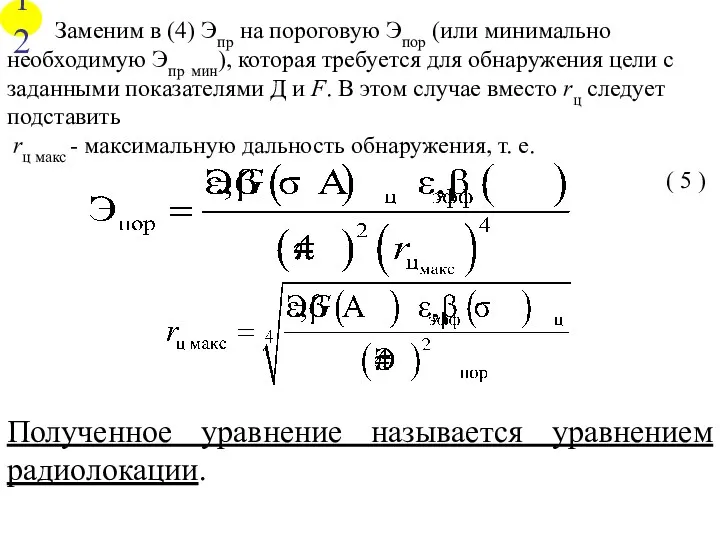
Заменим в (4) Эпр на пороговую Эпор (или минимально необходимую
Заменим в (4) Эпр на пороговую Эпор (или минимально необходимую
Величина Эпор находится из соотношения
Значения G и Аэфф являются функциями
Величина Эпор находится из соотношения
Значения G и Аэфф являются функциями
В направлении максимума ДН F(ε, β)=1, поэтому дальность обнаружения будет
В направлении максимума ДН F(ε, β)=1, поэтому дальность обнаружения будет
Проведем анализ дальности действия РЛС.
1. Из уравнения радиолокации следует,
Проведем анализ дальности действия РЛС.
1. Из уравнения радиолокации следует,
Влияние Земли и атмосферы на дальность действия РЛС
17
Влияние Земли и атмосферы на дальность действия РЛС
17
Влияние атмосферы
На дальность действия РЛС могут повлиять различные эффекты, возникающие
Влияние атмосферы
На дальность действия РЛС могут повлиять различные эффекты, возникающие
Характер и величина рефракции зависят от вертикального градиента коэффициента преломления
Характер и величина рефракции зависят от вертикального градиента коэффициента преломления
При бόльшем радиусе кривизны луча (кривая 5) отраженный от земли луч
При бόльшем радиусе кривизны луча (кривая 5) отраженный от земли луч
Сверхрефракция может возникнуть также над пустынями и полупустынями. Однако она
Сверхрефракция может возникнуть также над пустынями и полупустынями. Однако она
Экспериментальное подтверждение возможности приема последовательно отраженных от ионосферы и земной поверхности
Экспериментальное подтверждение возможности приема последовательно отраженных от ионосферы и земной поверхности
Затухание радиоволн в атмосфере обусловлено поглощением их энергии свободными молекулами
Затухание радиоволн в атмосфере обусловлено поглощением их энергии свободными молекулами
Величина коэффициента α зависит от длины волны (рис. 4).
Резонансные максимумы
Величина коэффициента α зависит от длины волны (рис. 4).
Резонансные максимумы
25
25
Физика процесса поглощения радиоволн в ионосфере состоит в том, что
Физика процесса поглощения радиоволн в ионосфере состоит в том, что
Таким образом, изменение состояния атмосферы приводит к изменению условий распространения
Таким образом, изменение состояния атмосферы приводит к изменению условий распространения
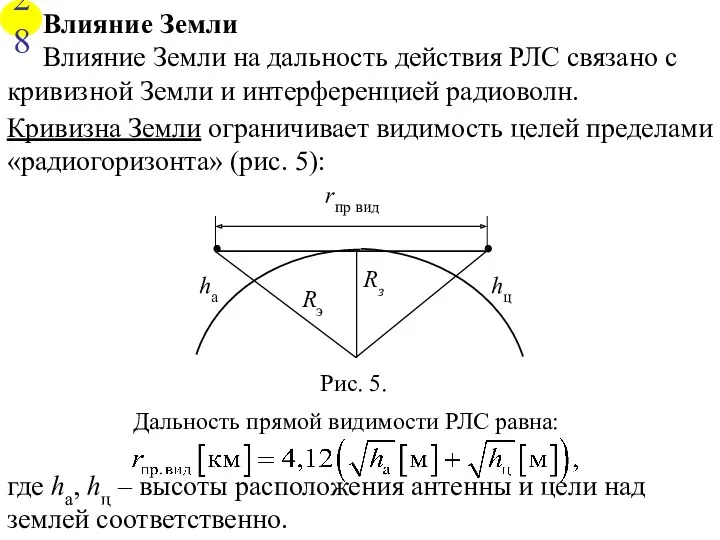
Дальность прямой видимости РЛС равна:
Влияние Земли
Влияние Земли на дальность действия
Дальность прямой видимости РЛС равна:
Влияние Земли
Влияние Земли на дальность действия
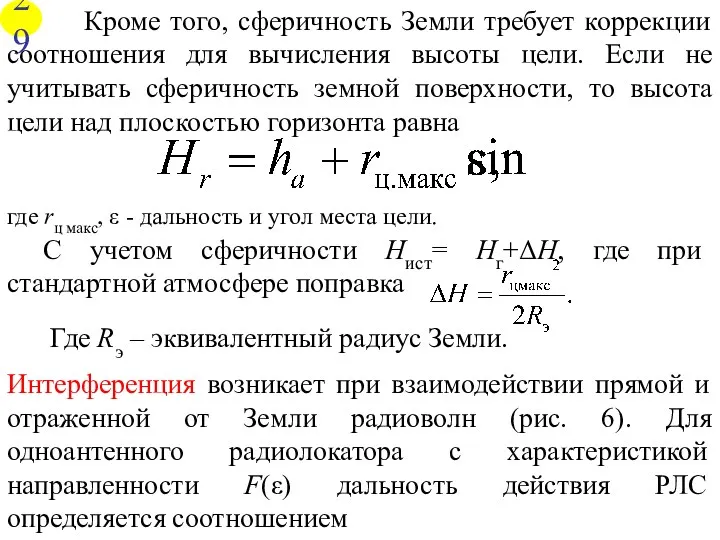
Кроме того, сферичность Земли требует коррекции соотношения для вычисления высоты
Кроме того, сферичность Земли требует коррекции соотношения для вычисления высоты
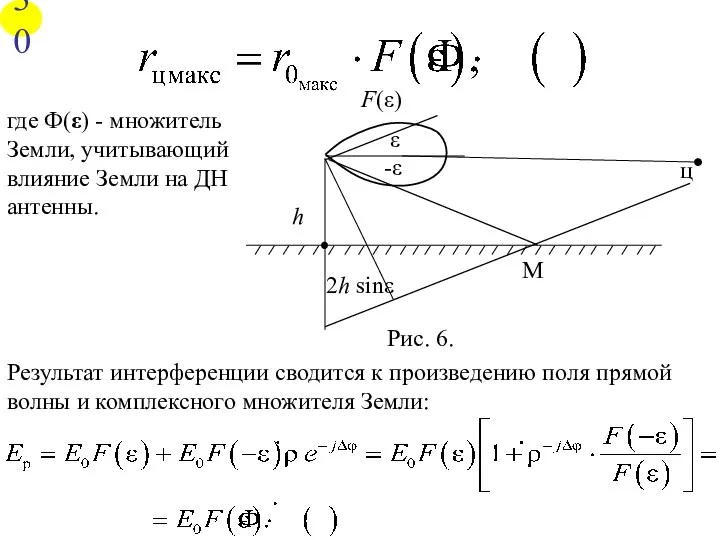
Рис. 6.
M
h
2h sinε
-ε
ε
F(ε)
ц∙
где Ф(ε) - множитель Земли, учитывающий влияние Земли на
Рис. 6.
M
h
2h sinε
-ε
ε
F(ε)
ц∙
где Ф(ε) - множитель Земли, учитывающий влияние Земли на
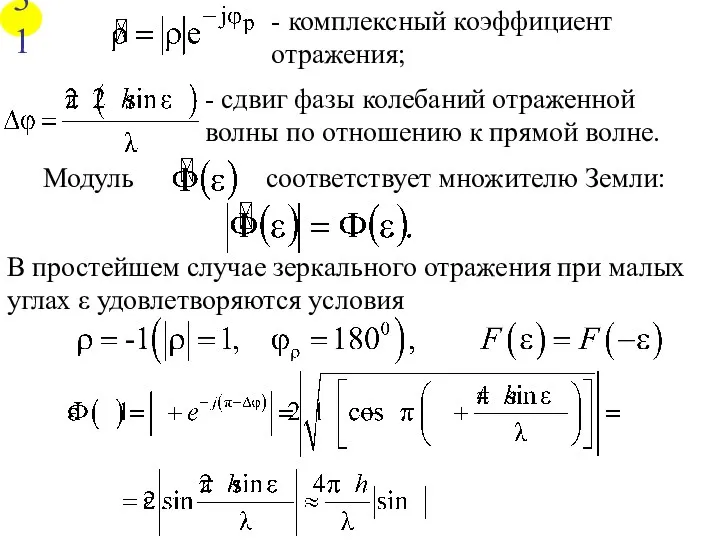
- комплексный коэффициент отражения;
- сдвиг фазы колебаний отраженной волны по
- комплексный коэффициент отражения;
- сдвиг фазы колебаний отраженной волны по
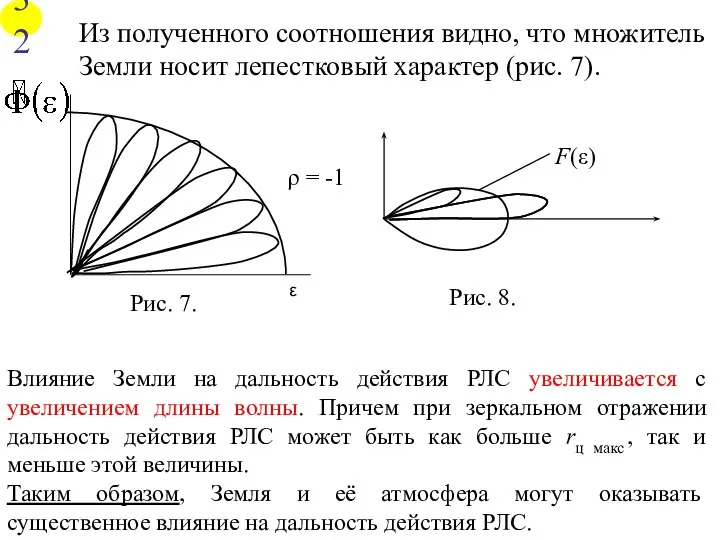
Из полученного соотношения видно, что множитель Земли носит лепестковый характер (рис.
Из полученного соотношения видно, что множитель Земли носит лепестковый характер (рис.
3. Зоны видимости РЛС
33
3. Зоны видимости РЛС
33
Зона видимости в вертикальной плоскости за счет влияния Земли может иметь
Зона видимости в вертикальной плоскости за счет влияния Земли может иметь
Зоны видимости могут строиться в аксонометрии или характеризоваться своими сечениями
Зоны видимости могут строиться в аксонометрии или характеризоваться своими сечениями

36
36
Для формирования беспровальной зоны обнаружения в РЛС метрового диапазона применяют два
Для формирования беспровальной зоны обнаружения в РЛС метрового диапазона применяют два
Зона видимости в вертикальной плоскости обычно строится в прямоугольной системе
Зона видимости в вертикальной плоскости обычно строится в прямоугольной системе
При этом высоту и дальность на диаграмме обычно откладывают в разных
При этом высоту и дальность на диаграмме обычно откладывают в разных
При локации маловысотных (H < 1000м) целей дальность действия РЛС
При локации маловысотных (H < 1000м) целей дальность действия РЛС
В зависимости от типа и технических характеристик РЛС используют различные зависимости
В зависимости от типа и технических характеристик РЛС используют различные зависимости
Мощность излучения. Средняя и импульсная мощности излучения бортовых РЛС зависят от
Мощность излучения. Средняя и импульсная мощности излучения бортовых РЛС зависят от
Спектральная плотность шумов. Спектральная плотность внутренних шумов приёмника равна N0 =
Спектральная плотность шумов. Спектральная плотность внутренних шумов приёмника равна N0 =
Помеховый сигнал фона. Основной вклад в помеховый сигнал фона вносят отражения
Помеховый сигнал фона. Основной вклад в помеховый сигнал фона вносят отражения
Потери в растительности αраст определяются для двух случаев обнаружения целей: под
Потери в растительности αраст определяются для двух случаев обнаружения целей: под
Заключительная часть
1. Дальность действия РЛС существенно увеличивается с ростом мощности
Заключительная часть
1. Дальность действия РЛС существенно увеличивается с ростом мощности

41
41
 Изотерапия, как одна из граней арттерапии.
Изотерапия, как одна из граней арттерапии. Раствор. Типы растворов. Способы выражения концентрации растворов. Теория электролитической диссоциации
Раствор. Типы растворов. Способы выражения концентрации растворов. Теория электролитической диссоциации Креативное программирование. Погружение в мир программирования и создание креативных проектов
Креативное программирование. Погружение в мир программирования и создание креативных проектов 275-летие со дня рождения русского полководца М.И. Кутузова (1745-1813). НТБ Люблинское
275-летие со дня рождения русского полководца М.И. Кутузова (1745-1813). НТБ Люблинское Развитие географических знаний о Земле. 6 кл.
Развитие географических знаний о Земле. 6 кл. Проект Виртуальный музей
Проект Виртуальный музей Расчёт блока вакуумной перегонки мазута, производительностью 2700000 т/год
Расчёт блока вакуумной перегонки мазута, производительностью 2700000 т/год Схема выдачи мощности Новоазовской ВЭС
Схема выдачи мощности Новоазовской ВЭС презентация к уроку Мы изучаем Японию
презентация к уроку Мы изучаем Японию Електробезпека
Електробезпека Механизированные способы добычи нефти
Механизированные способы добычи нефти Классификация химических реакций
Классификация химических реакций Старинная ярмарка.
Старинная ярмарка. Сера. Презентация к уроку химии в 9 классе.
Сера. Презентация к уроку химии в 9 классе. Оплодотворение
Оплодотворение Схема поверхностных течений
Схема поверхностных течений Проект Как погладить ёжика?
Проект Как погладить ёжика? Titania SlidesCarnival
Titania SlidesCarnival презентация проекта Встреча с будущим Диск
презентация проекта Встреча с будущим Диск Проводники, непроводники и полупроводники электричества
Проводники, непроводники и полупроводники электричества Международный женский день
Международный женский день урок с позиции здоровьесбережения
урок с позиции здоровьесбережения Карбоновые кислоты
Карбоновые кислоты презентация кружка оригами
презентация кружка оригами Духовная культура общества
Духовная культура общества Характеристики трещиностойкости фибробетона
Характеристики трещиностойкости фибробетона Отчет о прохождении учебной практики по профессиональному модулю
Отчет о прохождении учебной практики по профессиональному модулю Вес тела. Невесомость
Вес тела. Невесомость