- Динамические характеристики линейных систем

Содержание
- 2. ТАУ. Тема 2: Динамические характеристики линейных систем. Понятие «Система» Примеры систем: Понятие «Система» имеет различное содержание
- 3. ТАУ. Тема 2: Динамические характеристики линейных систем. Понятие «Динамическая система» В дисциплинах по автоматике и управлению
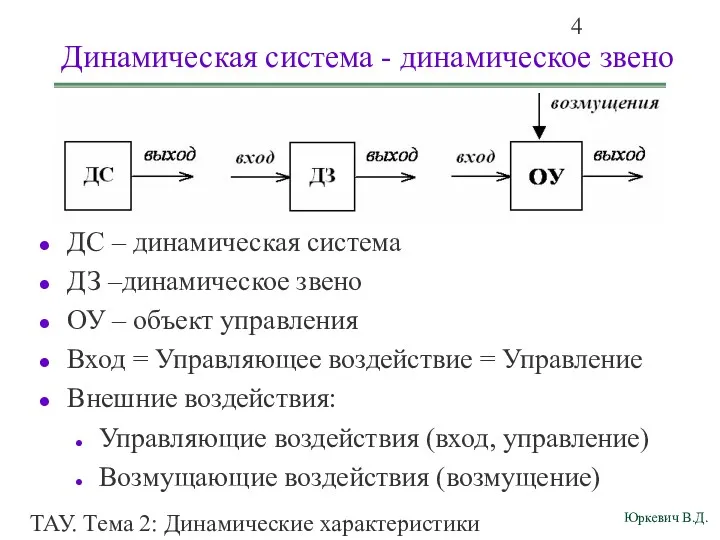
- 4. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамическая система - динамическое звено ДС – динамическая система
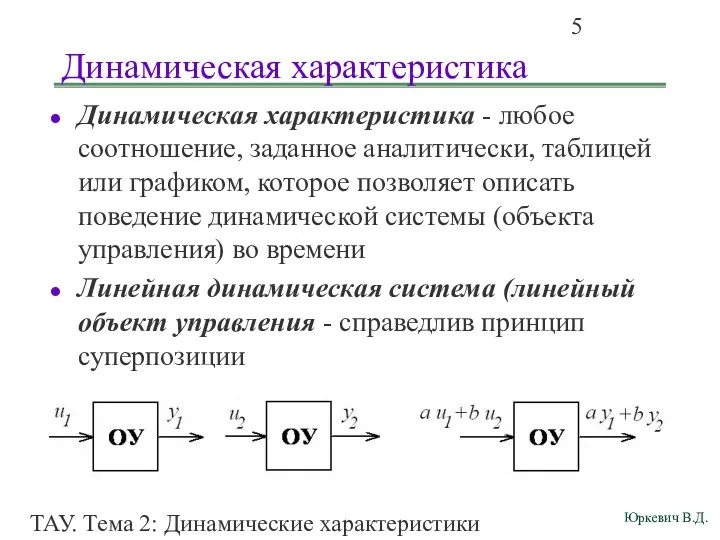
- 5. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамическая характеристика Динамическая характеристика - любое соотношение, заданное аналитически,
- 6. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем (объектов управления) Дифференциальные уравнения Структурные
- 7. ТАУ. Тема 2: Динамические характеристики линейных систем. Этапы построения математической модели ОУ Построить описательную модель объекта
- 8. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
- 9. ТАУ. Тема 2: Динамические характеристики линейных систем. Дифференциальные уравнения Переход от одного дифференциального уравнения высокого порядка
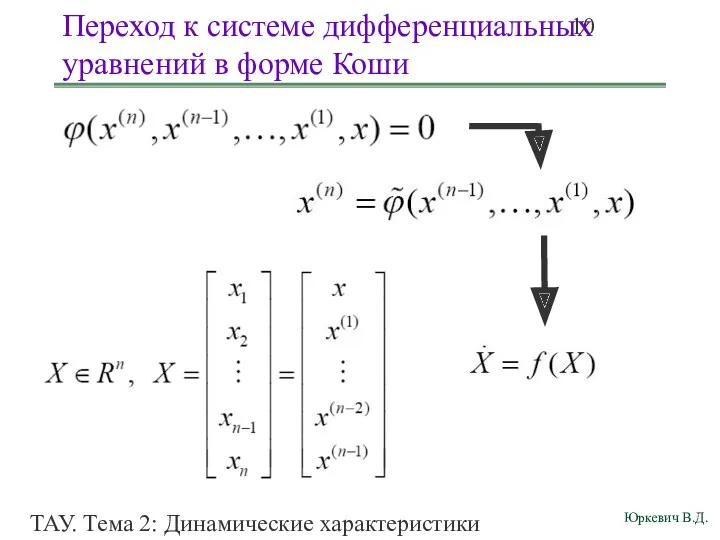
- 10. ТАУ. Тема 2: Динамические характеристики линейных систем. Переход к системе дифференциальных уравнений в форме Коши
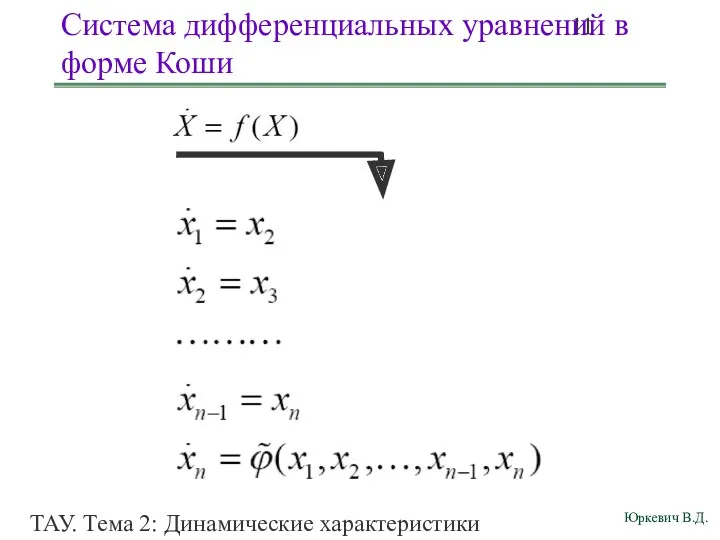
- 11. ТАУ. Тема 2: Динамические характеристики линейных систем. Система дифференциальных уравнений в форме Коши
- 12. ТАУ. Тема 2: Динамические характеристики линейных систем. Автономная динамическая система Динамическая система называется автономной, если ее
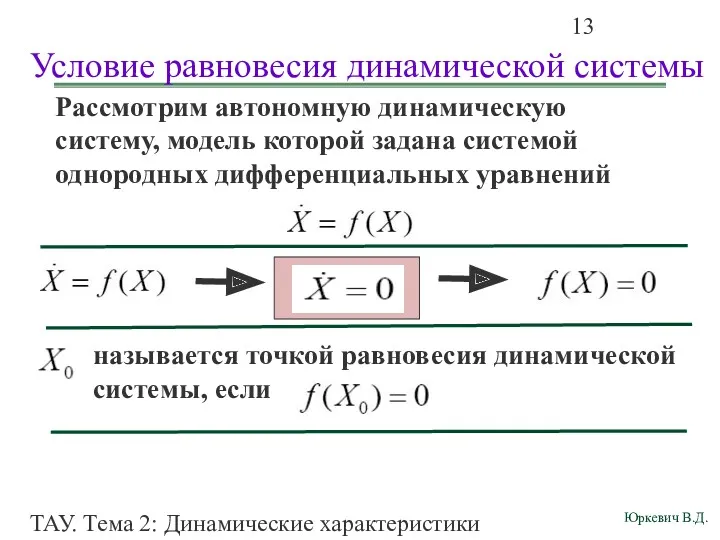
- 13. ТАУ. Тема 2: Динамические характеристики линейных систем. Условие равновесия динамической системы называется точкой равновесия динамической системы,
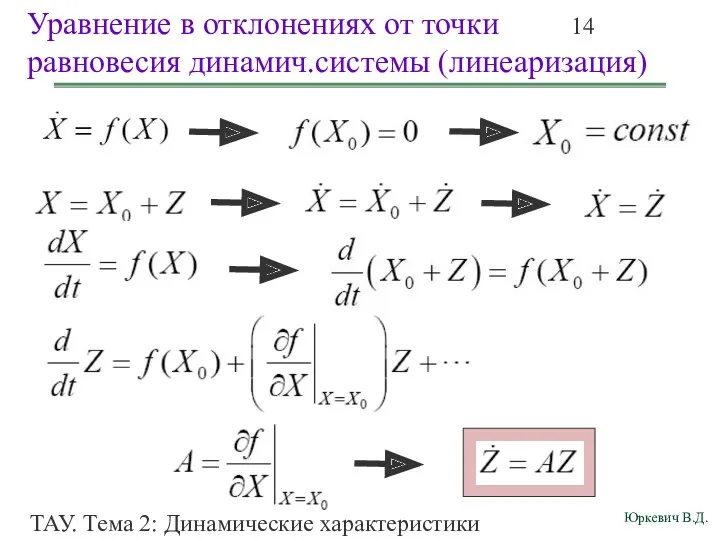
- 14. ТАУ. Тема 2: Динамические характеристики линейных систем. Уравнение в отклонениях от точки равновесия динамич.системы (линеаризация)
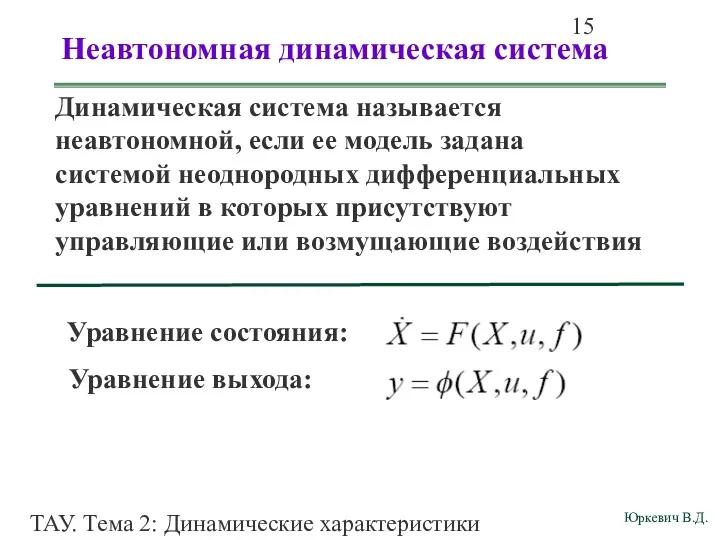
- 15. ТАУ. Тема 2: Динамические характеристики линейных систем. Неавтономная динамическая система Динамическая система называется неавтономной, если ее
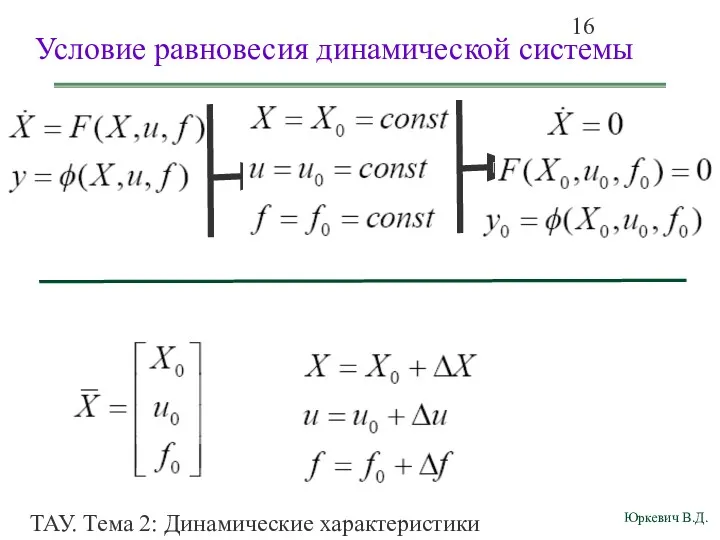
- 16. ТАУ. Тема 2: Динамические характеристики линейных систем. Условие равновесия динамической системы
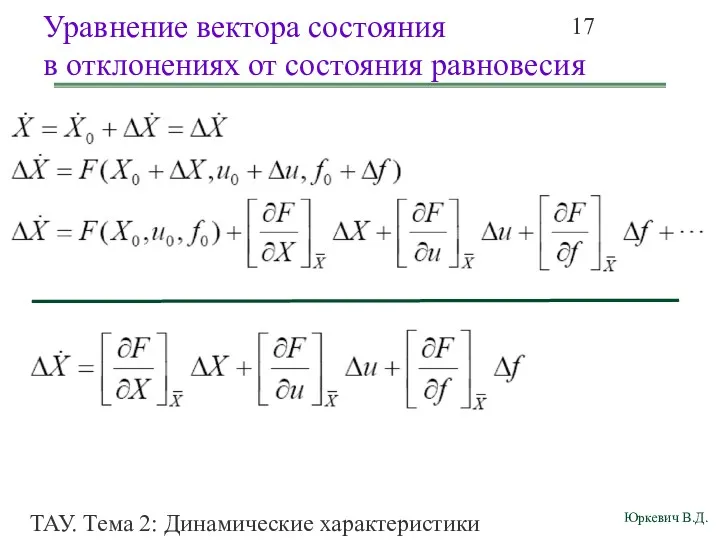
- 17. ТАУ. Тема 2: Динамические характеристики линейных систем. Уравнение вектора состояния в отклонениях от состояния равновесия
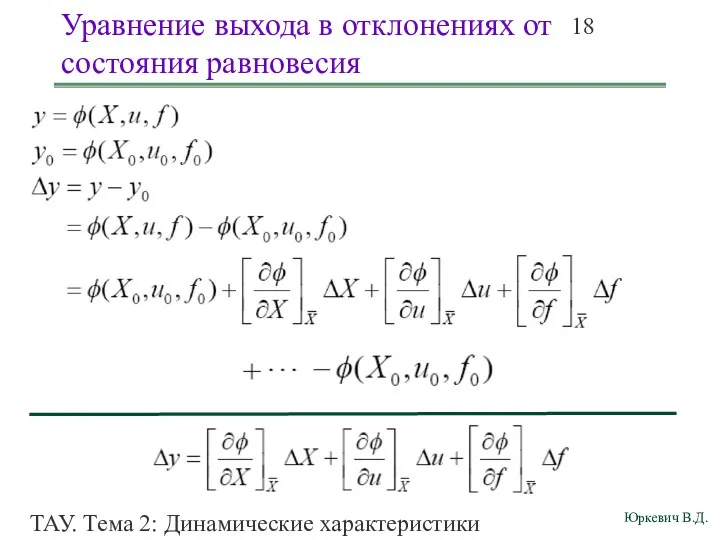
- 18. ТАУ. Тема 2: Динамические характеристики линейных систем. Уравнение выхода в отклонениях от состояния равновесия
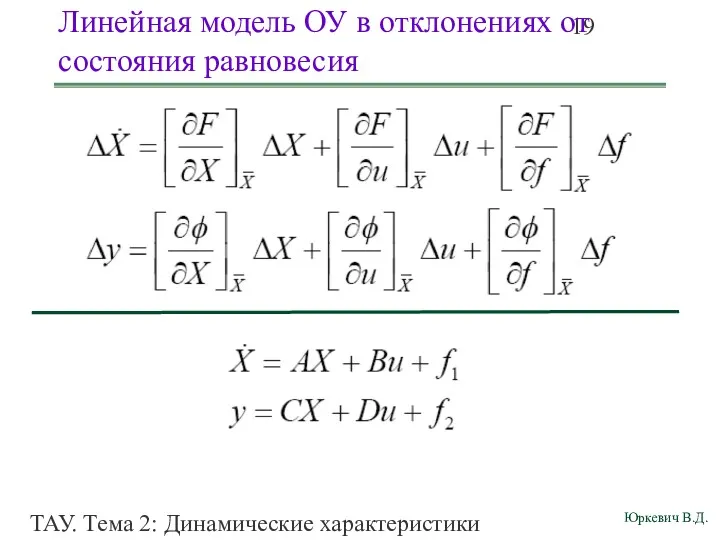
- 19. ТАУ. Тема 2: Динамические характеристики линейных систем. Линейная модель ОУ в отклонениях от состояния равновесия
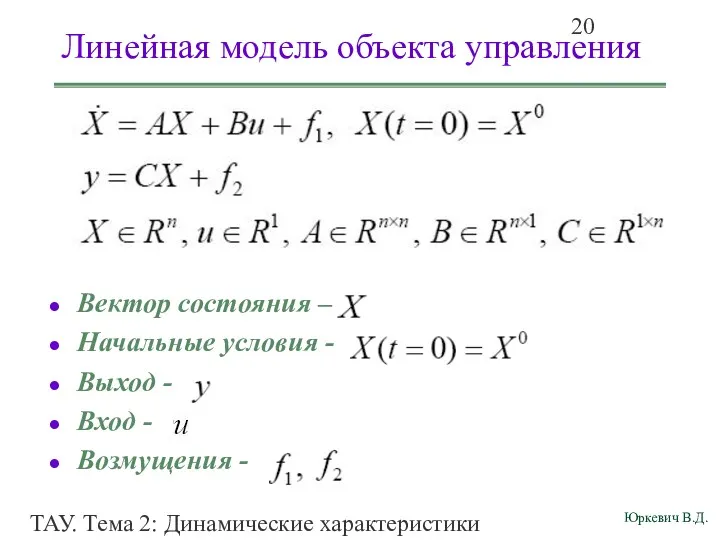
- 20. ТАУ. Тема 2: Динамические характеристики линейных систем. Линейная модель объекта управления Вектор состояния – Начальные условия
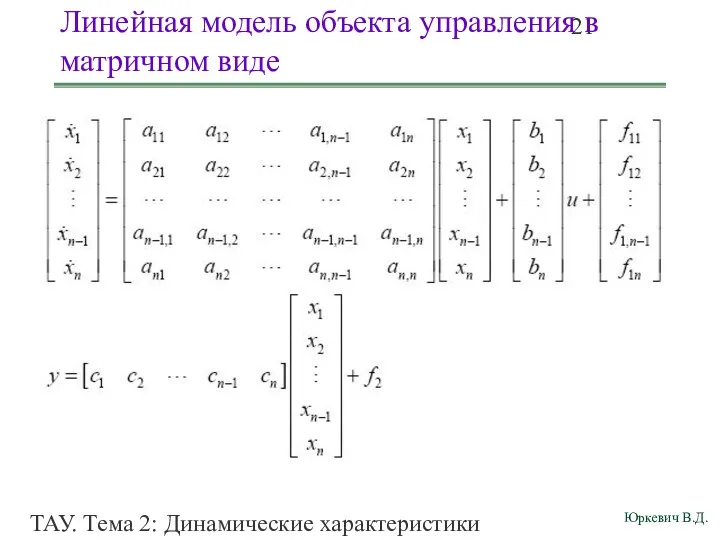
- 21. ТАУ. Тема 2: Динамические характеристики линейных систем. Линейная модель объекта управления в матричном виде
- 22. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
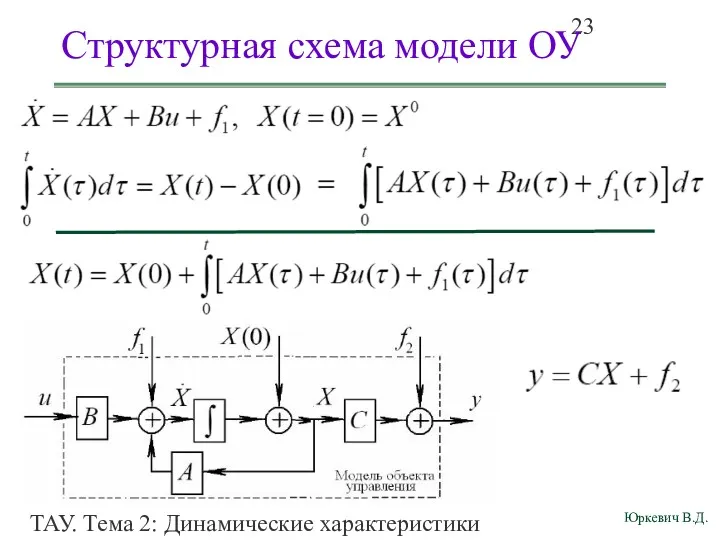
- 23. ТАУ. Тема 2: Динамические характеристики линейных систем. Структурная схема модели ОУ
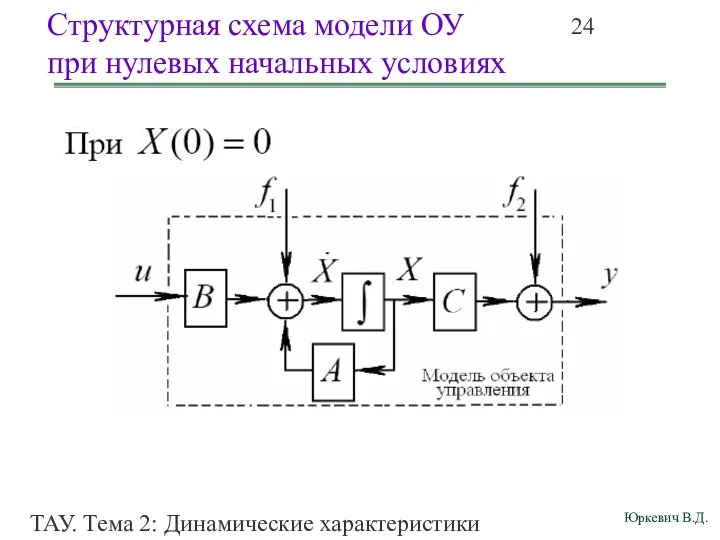
- 24. ТАУ. Тема 2: Динамические характеристики линейных систем. Структурная схема модели ОУ при нулевых начальных условиях
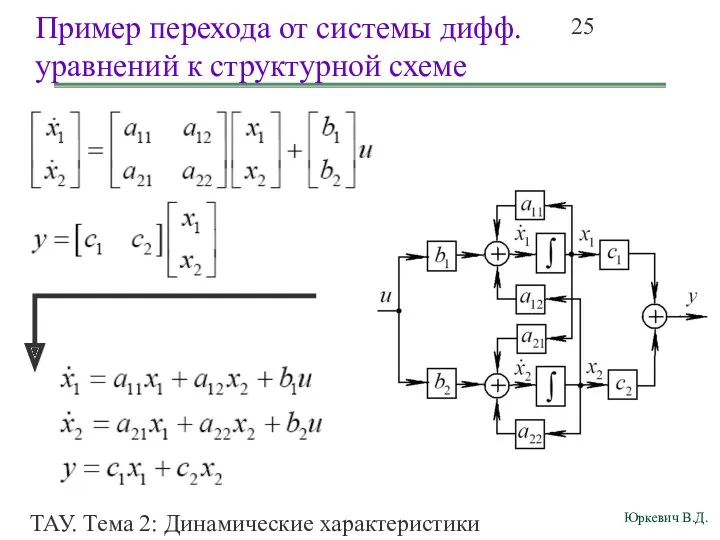
- 25. ТАУ. Тема 2: Динамические характеристики линейных систем. Пример перехода от системы дифф. уравнений к структурной схеме
- 26. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
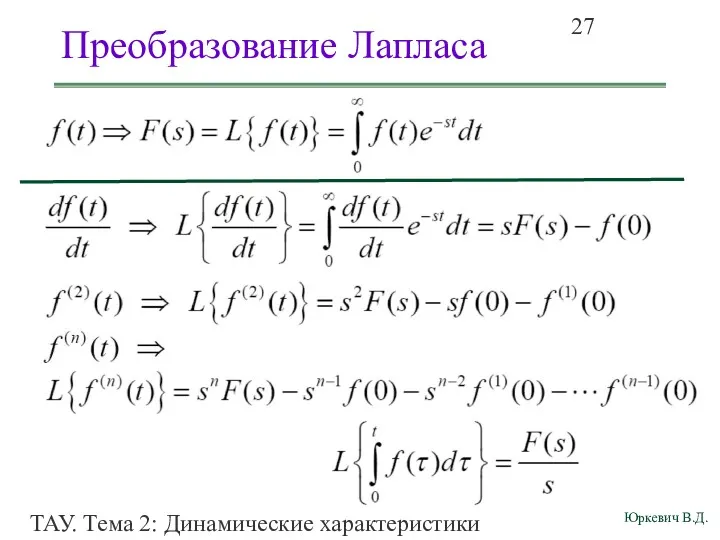
- 27. ТАУ. Тема 2: Динамические характеристики линейных систем. Преобразование Лапласа
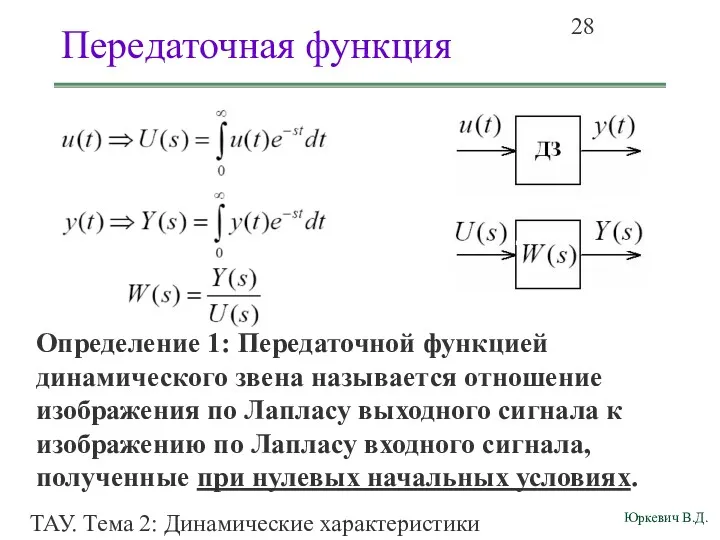
- 28. ТАУ. Тема 2: Динамические характеристики линейных систем. Передаточная функция Определение 1: Передаточной функцией динамического звена называется
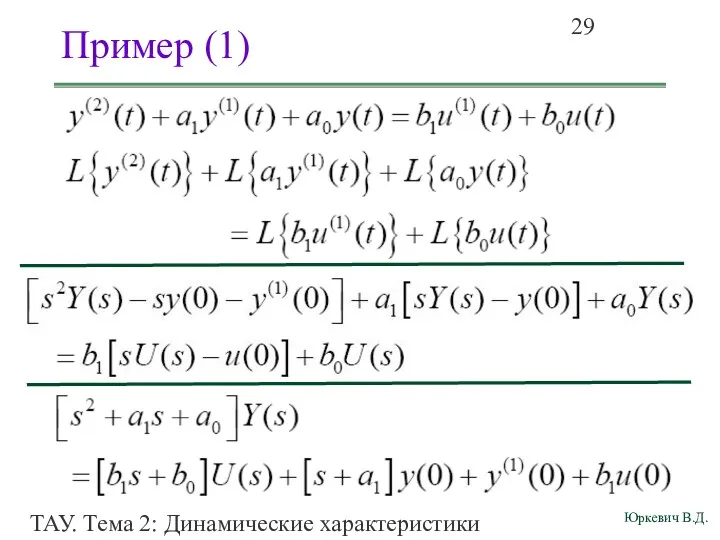
- 29. ТАУ. Тема 2: Динамические характеристики линейных систем. Пример (1)
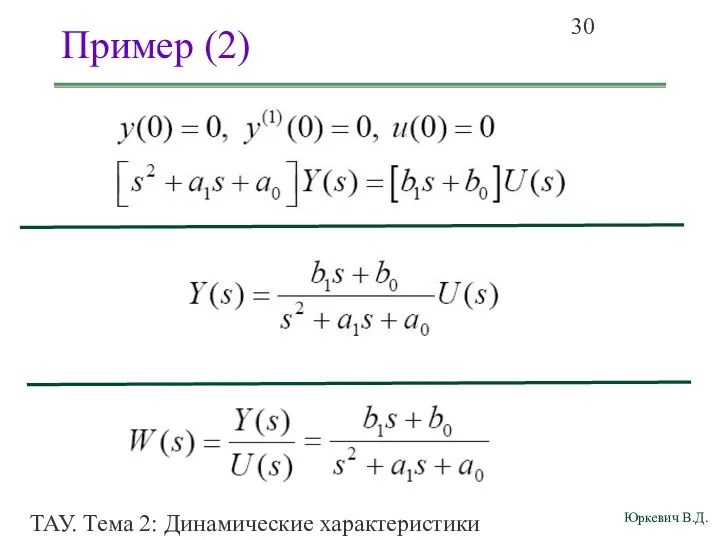
- 30. ТАУ. Тема 2: Динамические характеристики линейных систем. Пример (2)
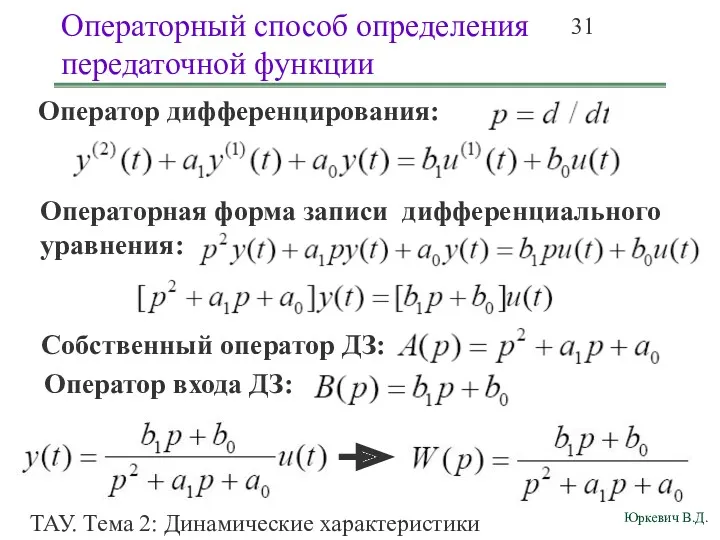
- 31. ТАУ. Тема 2: Динамические характеристики линейных систем. Операторный способ определения передаточной функции Оператор дифференцирования: Собственный оператор
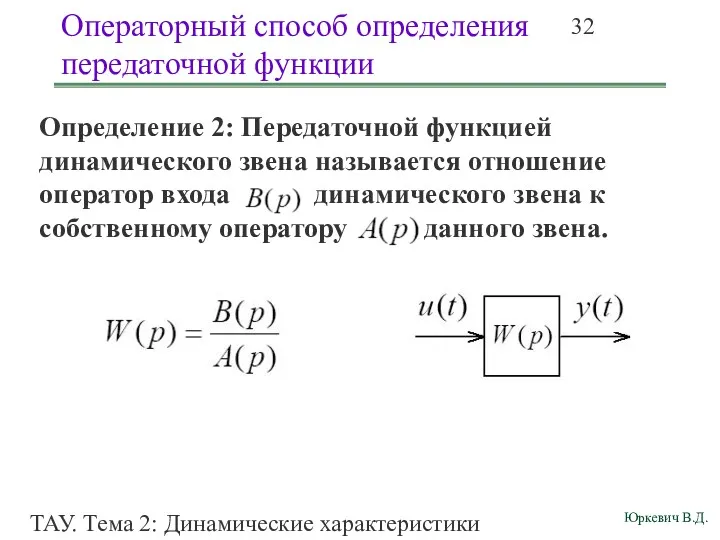
- 32. ТАУ. Тема 2: Динамические характеристики линейных систем. Операторный способ определения передаточной функции Определение 2: Передаточной функцией
- 33. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
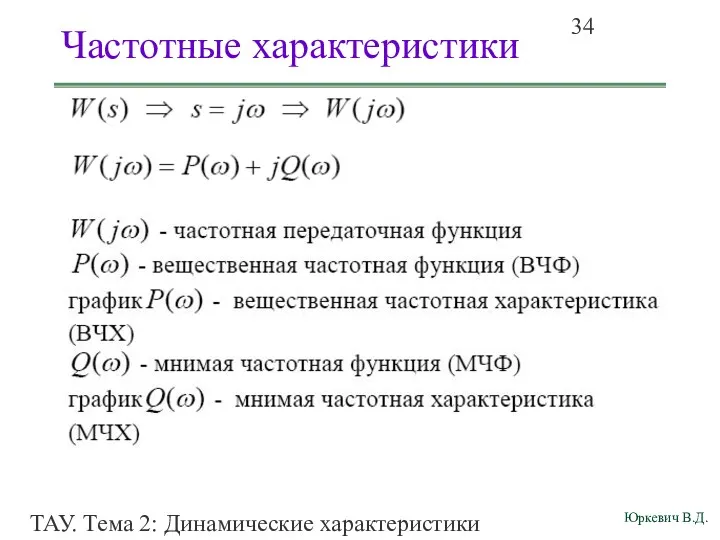
- 34. ТАУ. Тема 2: Динамические характеристики линейных систем. Частотные характеристики
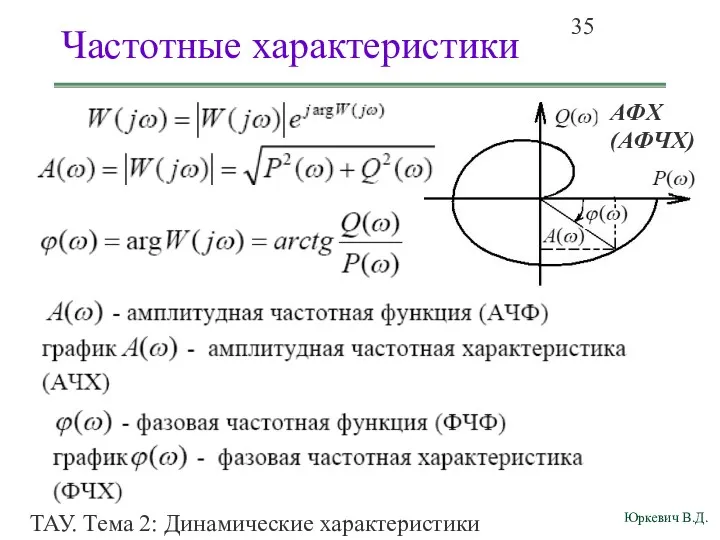
- 35. ТАУ. Тема 2: Динамические характеристики линейных систем. Частотные характеристики АФХ (АФЧХ)
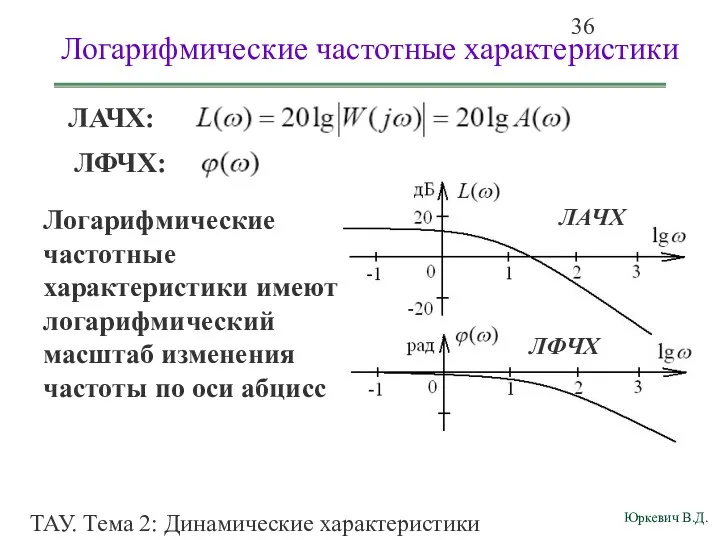
- 36. ТАУ. Тема 2: Динамические характеристики линейных систем. Логарифмические частотные характеристики ЛАЧХ: ЛФЧХ: Логарифмические частотные характеристики имеют
- 37. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
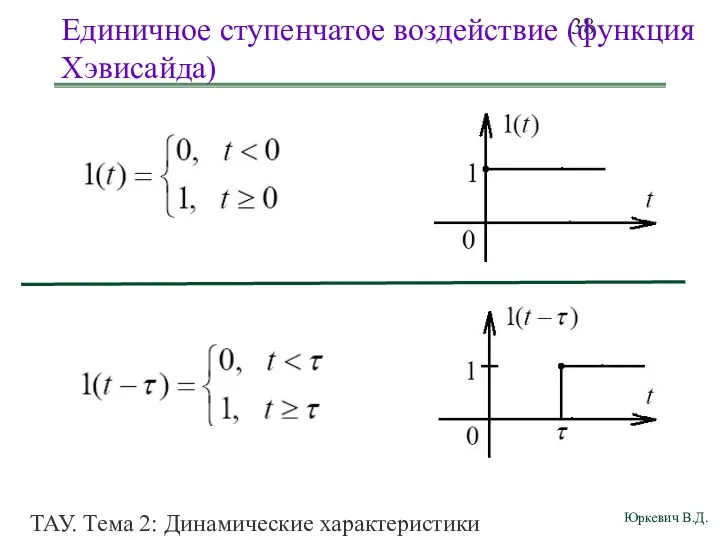
- 38. ТАУ. Тема 2: Динамические характеристики линейных систем. Единичное ступенчатое воздействие (функция Хэвисайда)
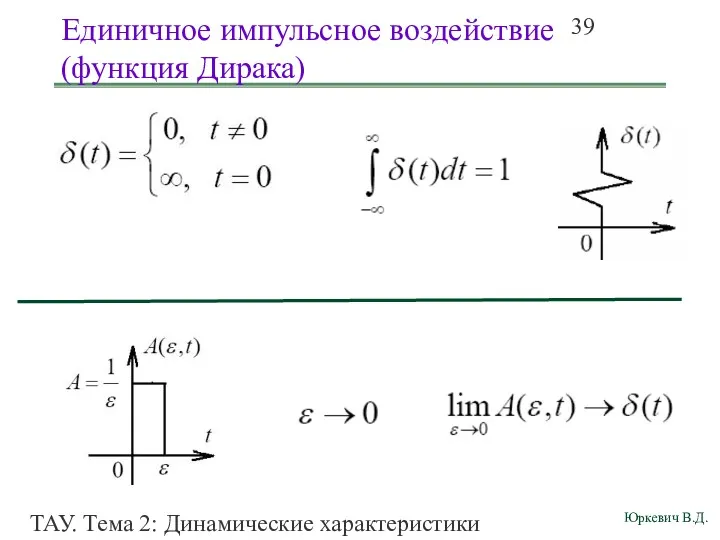
- 39. ТАУ. Тема 2: Динамические характеристики линейных систем. Единичное импульсное воздействие (функция Дирака)
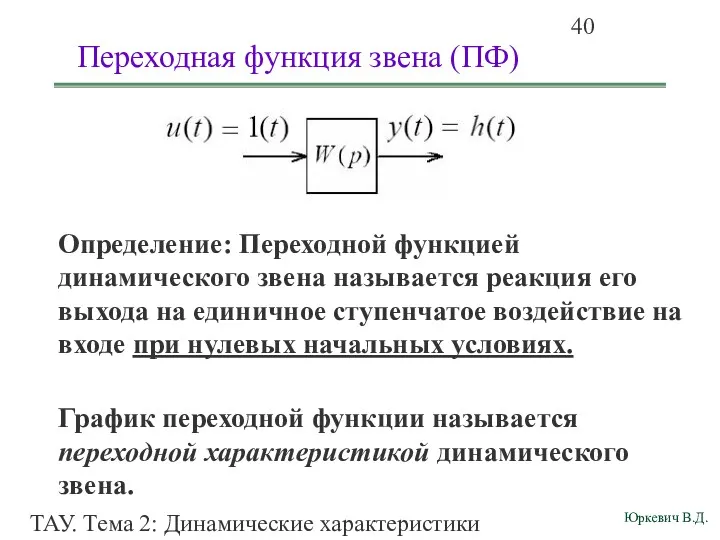
- 40. ТАУ. Тема 2: Динамические характеристики линейных систем. Переходная функция звена (ПФ) Определение: Переходной функцией динамического звена
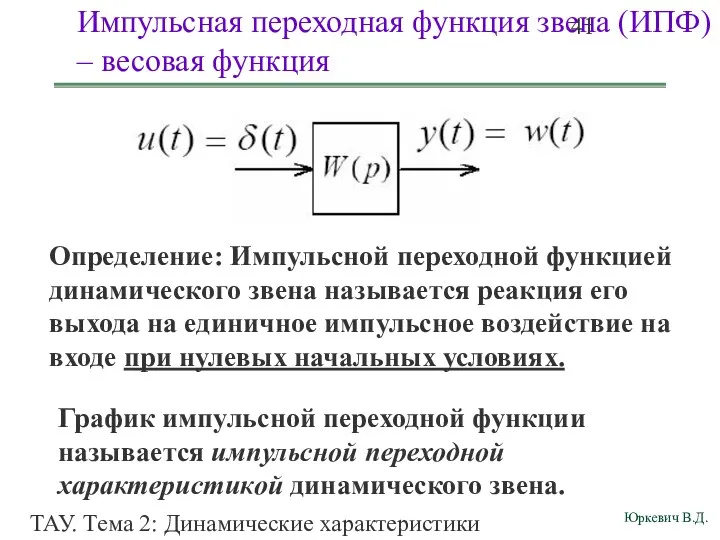
- 41. ТАУ. Тема 2: Динамические характеристики линейных систем. Импульсная переходная функция звена (ИПФ) – весовая функция Определение:
- 42. ТАУ. Тема 2: Динамические характеристики линейных систем. Динамические характеристики линейных систем Дифференциальные уравнения Структурные схемы Передаточные
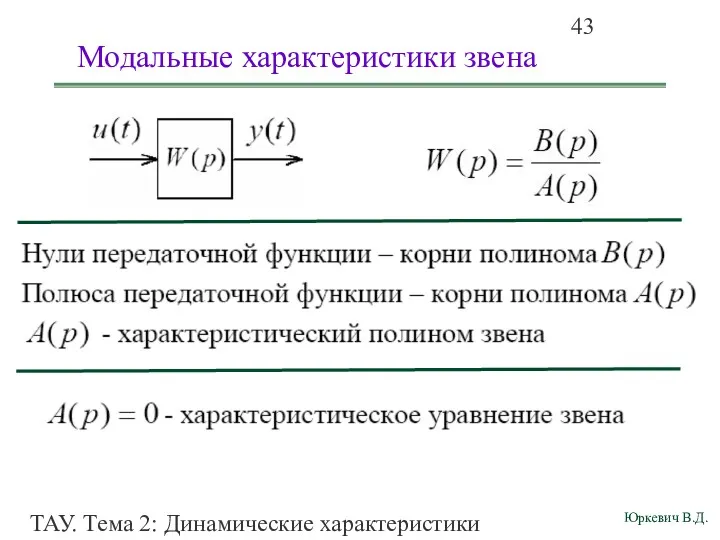
- 43. ТАУ. Тема 2: Динамические характеристики линейных систем. Модальные характеристики звена
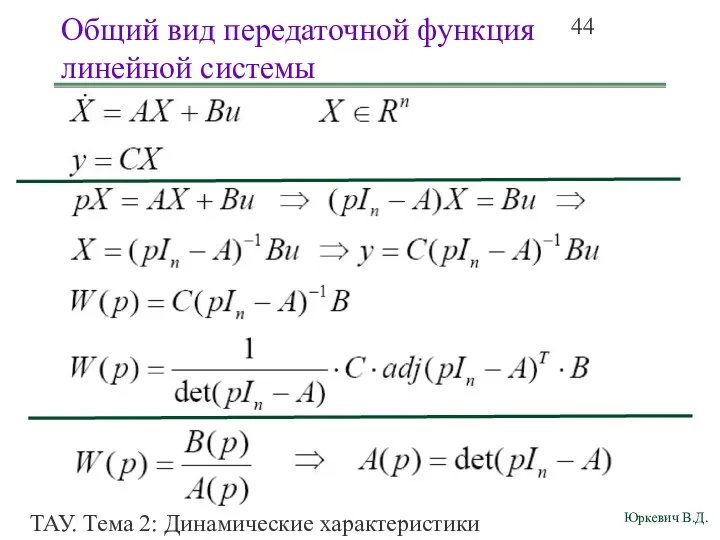
- 44. ТАУ. Тема 2: Динамические характеристики линейных систем. Общий вид передаточной функция линейной системы
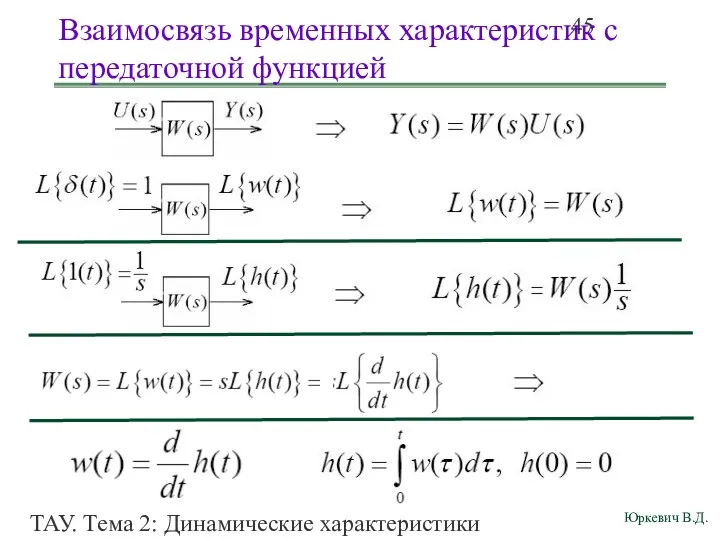
- 45. ТАУ. Тема 2: Динамические характеристики линейных систем. Взаимосвязь временных характеристик с передаточной функцией
- 47. Скачать презентацию
ТАУ. Тема 2: Динамические характеристики линейных систем.
Понятие «Система»
Примеры систем:
Понятие «Система» имеет
ТАУ. Тема 2: Динамические характеристики линейных систем.
Понятие «Система»
Примеры систем:
Понятие «Система» имеет
ТАУ. Тема 2: Динамические характеристики линейных систем.
Понятие «Динамическая система»
В дисциплинах по
ТАУ. Тема 2: Динамические характеристики линейных систем.
Понятие «Динамическая система»
В дисциплинах по
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамическая система - динамическое звено
ДС
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамическая система - динамическое звено
ДС
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамическая характеристика
Динамическая характеристика - любое
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамическая характеристика
Динамическая характеристика - любое
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем (объектов
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем (объектов
ТАУ. Тема 2: Динамические характеристики линейных систем.
Этапы построения математической модели ОУ
Построить
ТАУ. Тема 2: Динамические характеристики линейных систем.
Этапы построения математической модели ОУ
Построить
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Дифференциальные уравнения
Переход от одного дифференциального
ТАУ. Тема 2: Динамические характеристики линейных систем.
Дифференциальные уравнения
Переход от одного дифференциального
ТАУ. Тема 2: Динамические характеристики линейных систем.
Переход к системе дифференциальных уравнений
ТАУ. Тема 2: Динамические характеристики линейных систем.
Переход к системе дифференциальных уравнений
ТАУ. Тема 2: Динамические характеристики линейных систем.
Система дифференциальных уравнений в форме
ТАУ. Тема 2: Динамические характеристики линейных систем.
Система дифференциальных уравнений в форме
ТАУ. Тема 2: Динамические характеристики линейных систем.
Автономная динамическая система
Динамическая система называется
ТАУ. Тема 2: Динамические характеристики линейных систем.
Автономная динамическая система
Динамическая система называется
ТАУ. Тема 2: Динамические характеристики линейных систем.
Условие равновесия динамической системы
называется точкой
ТАУ. Тема 2: Динамические характеристики линейных систем.
Условие равновесия динамической системы
называется точкой
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение в отклонениях от точки
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение в отклонениях от точки
ТАУ. Тема 2: Динамические характеристики линейных систем.
Неавтономная динамическая система
Динамическая система называется
ТАУ. Тема 2: Динамические характеристики линейных систем.
Неавтономная динамическая система
Динамическая система называется
ТАУ. Тема 2: Динамические характеристики линейных систем.
Условие равновесия динамической системы
ТАУ. Тема 2: Динамические характеристики линейных систем.
Условие равновесия динамической системы
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение вектора состояния
в отклонениях
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение вектора состояния в отклонениях
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение выхода в отклонениях от
ТАУ. Тема 2: Динамические характеристики линейных систем.
Уравнение выхода в отклонениях от
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель ОУ в отклонениях
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель ОУ в отклонениях
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель объекта управления
Вектор состояния
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель объекта управления
Вектор состояния
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель объекта управления в
ТАУ. Тема 2: Динамические характеристики линейных систем.
Линейная модель объекта управления в
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Структурная схема модели ОУ
ТАУ. Тема 2: Динамические характеристики линейных систем.
Структурная схема модели ОУ
ТАУ. Тема 2: Динамические характеристики линейных систем.
Структурная схема модели ОУ
при
ТАУ. Тема 2: Динамические характеристики линейных систем.
Структурная схема модели ОУ при
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример перехода от системы дифф.
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример перехода от системы дифф.
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Преобразование Лапласа
ТАУ. Тема 2: Динамические характеристики линейных систем.
Преобразование Лапласа
ТАУ. Тема 2: Динамические характеристики линейных систем.
Передаточная функция
Определение 1: Передаточной функцией
ТАУ. Тема 2: Динамические характеристики линейных систем.
Передаточная функция
Определение 1: Передаточной функцией
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример (1)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример (1)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример (2)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Пример (2)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Операторный способ определения передаточной функции
Оператор
ТАУ. Тема 2: Динамические характеристики линейных систем.
Операторный способ определения передаточной функции
Оператор
ТАУ. Тема 2: Динамические характеристики линейных систем.
Операторный способ определения передаточной функции
Определение
ТАУ. Тема 2: Динамические характеристики линейных систем.
Операторный способ определения передаточной функции
Определение
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Частотные характеристики
ТАУ. Тема 2: Динамические характеристики линейных систем.
Частотные характеристики
ТАУ. Тема 2: Динамические характеристики линейных систем.
Частотные характеристики
АФХ (АФЧХ)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Частотные характеристики
АФХ (АФЧХ)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Логарифмические частотные характеристики
ЛАЧХ:
ЛФЧХ:
Логарифмические частотные характеристики
ТАУ. Тема 2: Динамические характеристики линейных систем.
Логарифмические частотные характеристики
ЛАЧХ:
ЛФЧХ:
Логарифмические частотные характеристики
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Единичное ступенчатое воздействие (функция Хэвисайда)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Единичное ступенчатое воздействие (функция Хэвисайда)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Единичное импульсное воздействие (функция Дирака)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Единичное импульсное воздействие (функция Дирака)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Переходная функция звена (ПФ)
Определение: Переходной
ТАУ. Тема 2: Динамические характеристики линейных систем.
Переходная функция звена (ПФ)
Определение: Переходной
ТАУ. Тема 2: Динамические характеристики линейных систем.
Импульсная переходная функция звена (ИПФ)
ТАУ. Тема 2: Динамические характеристики линейных систем.
Импульсная переходная функция звена (ИПФ)

ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики
линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Динамические характеристики
линейных систем
Дифференциальные уравнения
Структурные
ТАУ. Тема 2: Динамические характеристики линейных систем.
Модальные характеристики звена
ТАУ. Тема 2: Динамические характеристики линейных систем.
Модальные характеристики звена
ТАУ. Тема 2: Динамические характеристики линейных систем.
Общий вид передаточной функция линейной
ТАУ. Тема 2: Динамические характеристики линейных систем.
Общий вид передаточной функция линейной
ТАУ. Тема 2: Динамические характеристики линейных систем.
Взаимосвязь временных характеристик с передаточной
ТАУ. Тема 2: Динамические характеристики линейных систем.
Взаимосвязь временных характеристик с передаточной
 Обследование звукослоговой структуры слов с использованием ИКТ
Обследование звукослоговой структуры слов с использованием ИКТ Кіномистецтво
Кіномистецтво Проект на тему Человек, которым я горжусь. Владимир Иванович Даль 1801-1872
Проект на тему Человек, которым я горжусь. Владимир Иванович Даль 1801-1872 Иконопись. Русская икона
Иконопись. Русская икона День недели…
День недели… Эстетикалық стоматология үшін оптикалық жүйенің маңызы
Эстетикалық стоматология үшін оптикалық жүйенің маңызы Презентация Интегративный подход в организации экспериментальной деятельности младших дошкольников
Презентация Интегративный подход в организации экспериментальной деятельности младших дошкольников Автомобильные грузовые транспортные средства
Автомобильные грузовые транспортные средства Военно-мостовая подготовка. Итоговый тест
Военно-мостовая подготовка. Итоговый тест ЧПУ станоктары
ЧПУ станоктары Материнская плата
Материнская плата Презентация к классному часу Наши права и обязанности
Презентация к классному часу Наши права и обязанности Межзвёздная среда: Газ и пыль
Межзвёздная среда: Газ и пыль мультик
мультик класс
класс русский 08.02
русский 08.02 Случаи вычитания 16-
Случаи вычитания 16- Клятвы на новый год
Клятвы на новый год Контроль качества строительно-монтажных работ
Контроль качества строительно-монтажных работ Проблематика романа М. Булгакова Белая гвардия
Проблематика романа М. Булгакова Белая гвардия Разработка урока Планеты Солнечной системы.
Разработка урока Планеты Солнечной системы. Сотворение человека. Православная антропология
Сотворение человека. Православная антропология The degrees of comparison of adjectives
The degrees of comparison of adjectives Проектная деятельность обучающихся. Проект по теме Сколько весит здоровье ученика?
Проектная деятельность обучающихся. Проект по теме Сколько весит здоровье ученика? 20191208_kraevedcheskoe_kazino_loyma_i_eyo_okrestnosti
20191208_kraevedcheskoe_kazino_loyma_i_eyo_okrestnosti Советский Союз в 1950--1991 годах
Советский Союз в 1950--1991 годах Испытание № 6. Бутерброд NETWORKING
Испытание № 6. Бутерброд NETWORKING Загадки про игрушки (ранний возраст)
Загадки про игрушки (ранний возраст)