Директорное и автоматическое управление продольным траекторным движением при заходе на посадку презентация
- Директорное и автоматическое управление продольным траекторным движением при заходе на посадку

Содержание
- 2. Управление продольным траекторным движением самолета при заходе на посадку производится пилотом визуально по наземным ориентирам и
- 3. 17.1.1. Система директорного управления угловым отклонением от равносигнальной линии глиссады (СДУ ) -отклонение продольной командной стрелки
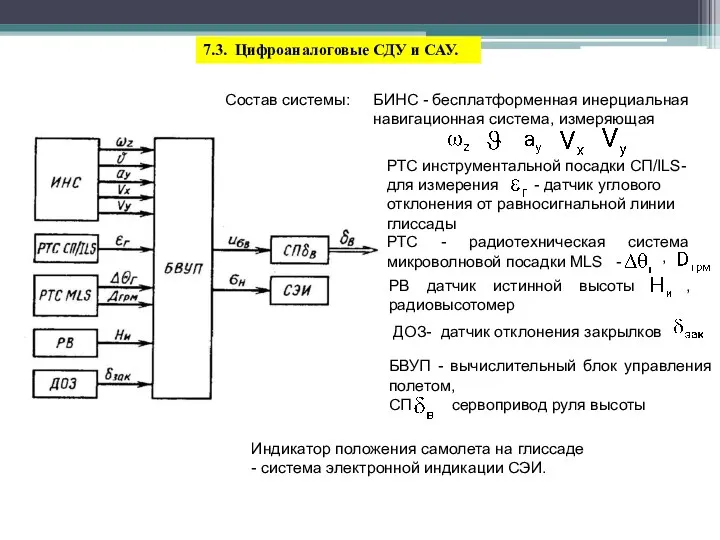
- 4. Функциональная схема аналоговой СДУ Состав системы: датчик текущего угла тангажа - гировертикаль ГВ; датчик отклонения самолета
- 6. Обычно в режиме директорного захода на посадку САУ работает, как система устойчивости и управляемости, решая задачи
- 7. 17.1.2. Система автоматического управления угловым отклонением от равносигнальной линии глиссады (САУ ) обеспечивает стабилизацию и управление
- 8. 17.2 Особенности законов управления. Способы формирования управляющего сигнала - обеспечивает устойчивость движения; - целевой сигнал ;
- 9. Методы коррекции передаточных коэффициентов основываются либо на ослаблении сигнала с ГРМ в функции дальности, либо на
- 10. Особенности формирования законов управления СТУ с учетом действия помех. Высокочастотные помехи оказывают существенное влияние на качество
- 11. Вместо сигнала в законе управления в принципе может использоваться сигнал Этот сигнал можно получить от вариометра,
- 12. Для повышения точности стабилизации самолета на глиссаде прибегают к компенсации возмущений, вызываемых изменением угла наклона траектории
- 14. , БВУП - вычислительный блок управления полетом, СП сервопривод руля высоты РВ датчик истинной высоты ,
- 15. Фазы автоматического управления заходом на посадку: подготовка глиссады, выход на глиссаду и стабилизация глиссады. Существуют две
- 16. Условия включения фазы стабилизации глиссады следующие: заданные значения отклонения текущего значения вертикальной скорости от расчетного значения
- 17. Структурная схема формирования сигнала приращения заданного угла тангажа цифроаналоговой САУ в режимах ДЗП и АЗП ЗУ
- 18. Первый (с Тау) уменьшает погрешности измерения ускорения ау . Второй (Тф1 и Тф2) ограничивает короткопериодические частоты
- 19. - сигнал заданного изменения вертикальной скорости. - сигнал линейного отклонения от равносигнальной линии глиссады; - сигнал
- 21. Скачать презентацию
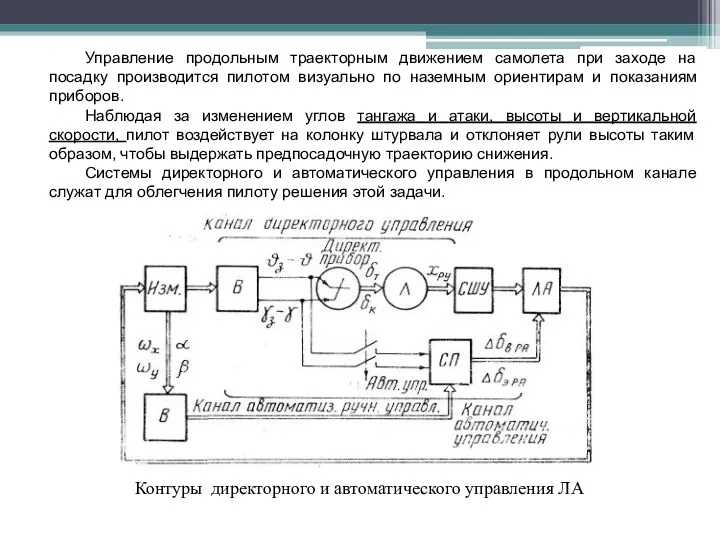
Управление продольным траекторным движением самолета при заходе на посадку производится пилотом
Управление продольным траекторным движением самолета при заходе на посадку производится пилотом
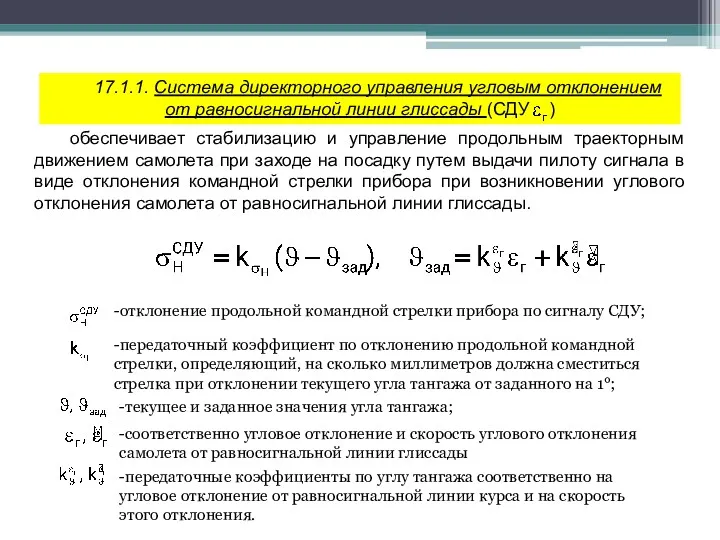
17.1.1. Система директорного управления угловым отклонением от равносигнальной линии глиссады (СДУ
17.1.1. Система директорного управления угловым отклонением от равносигнальной линии глиссады (СДУ
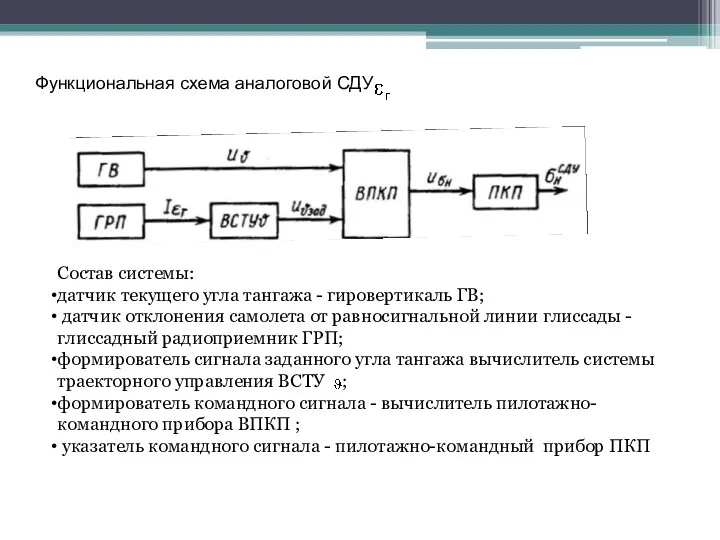
Функциональная схема аналоговой СДУ
Состав системы:
датчик текущего угла тангажа - гировертикаль
Функциональная схема аналоговой СДУ
Состав системы:
датчик текущего угла тангажа - гировертикаль
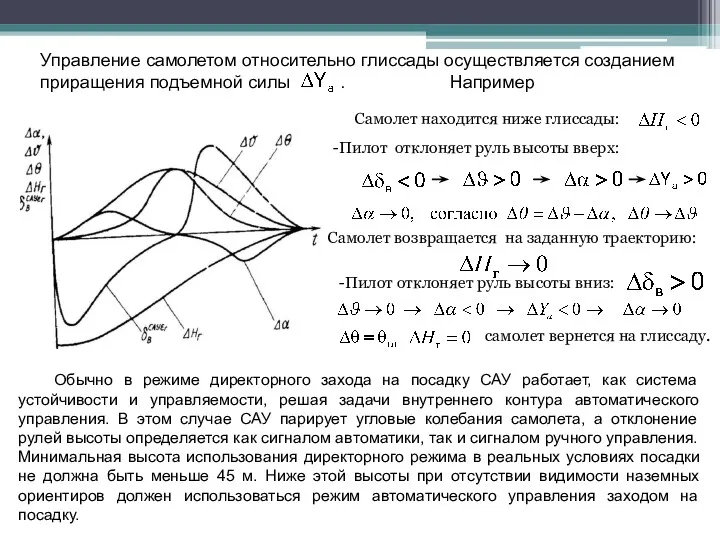
Обычно в режиме директорного захода на посадку САУ работает, как система
Обычно в режиме директорного захода на посадку САУ работает, как система
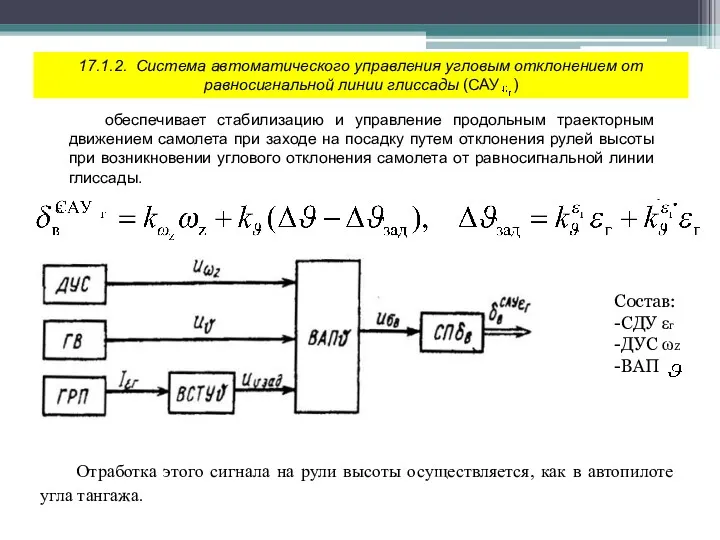
17.1.2. Система автоматического управления угловым отклонением от равносигнальной линии глиссады (САУ
17.1.2. Система автоматического управления угловым отклонением от равносигнальной линии глиссады (САУ
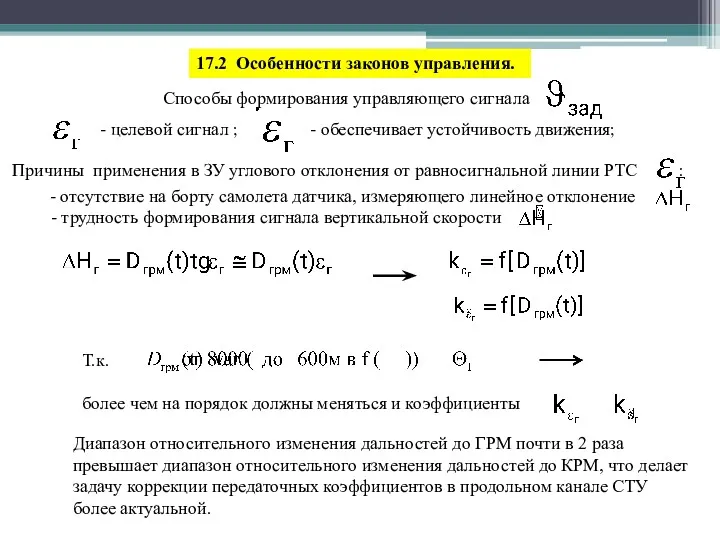
17.2 Особенности законов управления.
Способы формирования управляющего сигнала
- обеспечивает устойчивость движения;
17.2 Особенности законов управления.
Способы формирования управляющего сигнала
- обеспечивает устойчивость движения;
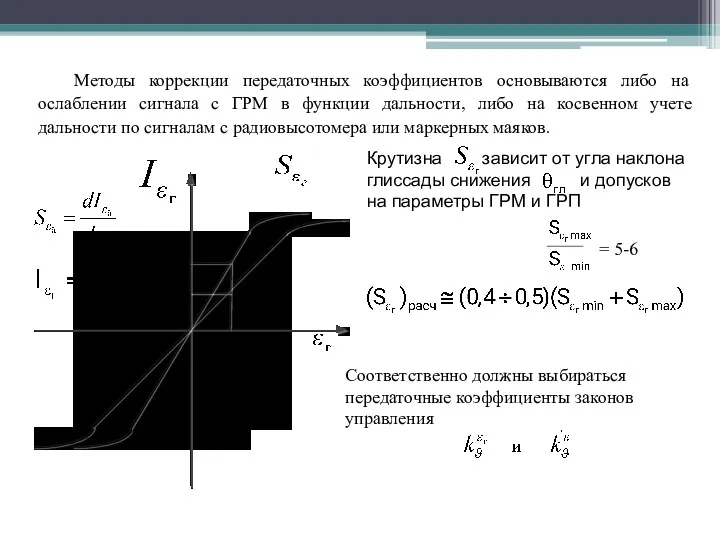
Методы коррекции передаточных коэффициентов основываются либо на ослаблении сигнала с ГРМ
Методы коррекции передаточных коэффициентов основываются либо на ослаблении сигнала с ГРМ
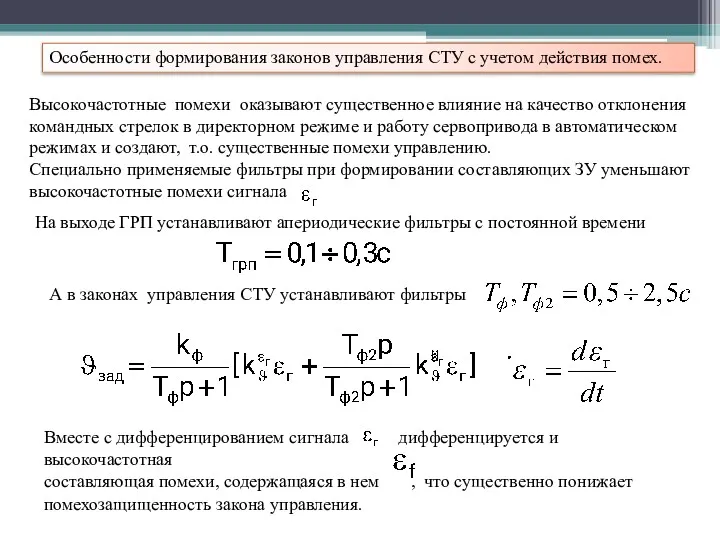
Особенности формирования законов управления СТУ с учетом действия помех.
Высокочастотные помехи
Особенности формирования законов управления СТУ с учетом действия помех.
Высокочастотные помехи
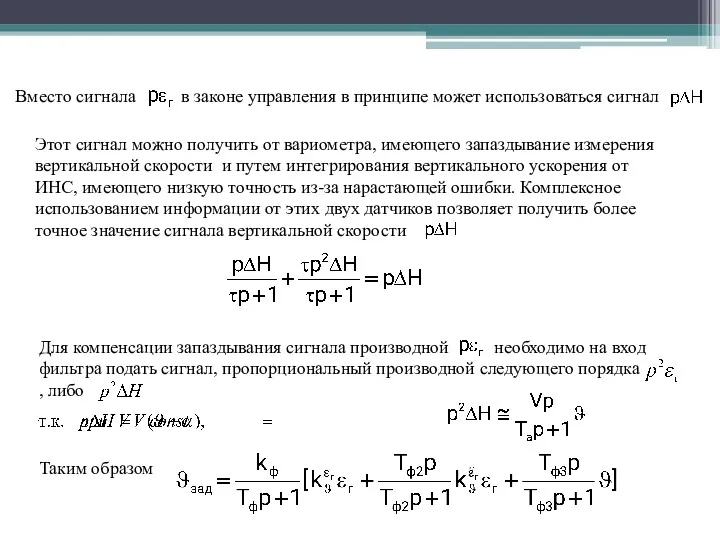
Вместо сигнала в законе управления в принципе может использоваться сигнал
Этот
Вместо сигнала в законе управления в принципе может использоваться сигнал
Этот
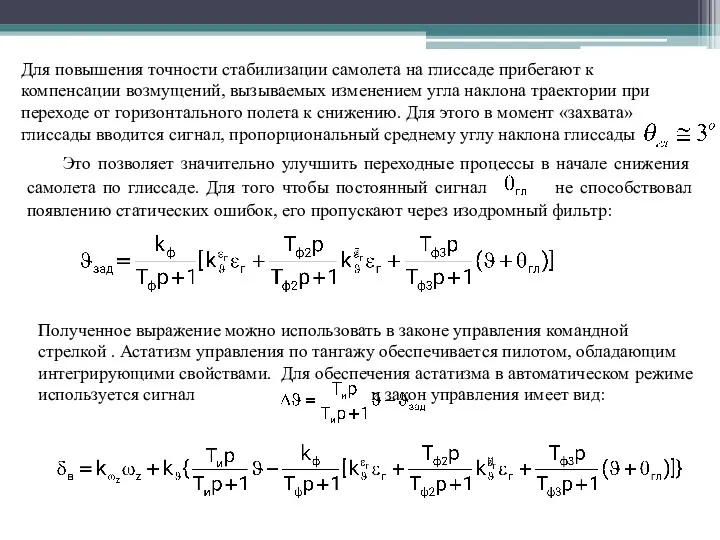
Для повышения точности стабилизации самолета на глиссаде прибегают к компенсации возмущений,
Для повышения точности стабилизации самолета на глиссаде прибегают к компенсации возмущений,
,
БВУП - вычислительный блок управления полетом,
СП сервопривод руля высоты
РВ
,
БВУП - вычислительный блок управления полетом,
СП сервопривод руля высоты
РВ
Фазы автоматического управления заходом на посадку:
подготовка глиссады,
выход на глиссаду и
Фазы автоматического управления заходом на посадку:
подготовка глиссады,
выход на глиссаду и
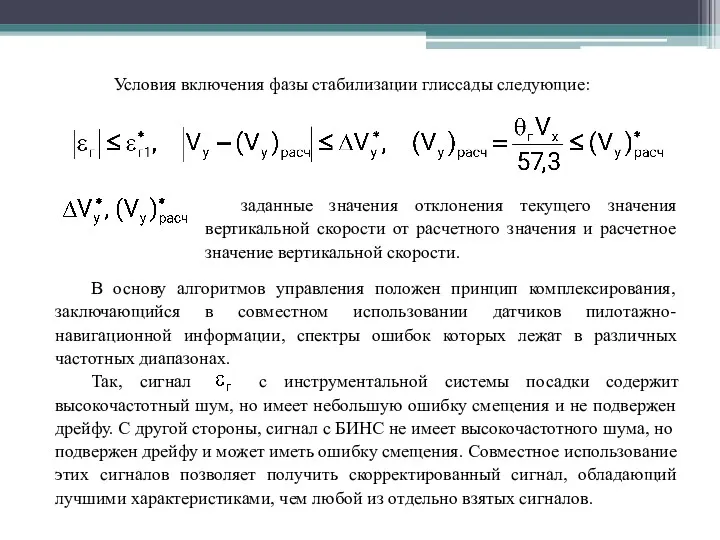
Условия включения фазы стабилизации глиссады следующие:
заданные значения отклонения текущего значения вертикальной
Условия включения фазы стабилизации глиссады следующие:
заданные значения отклонения текущего значения вертикальной
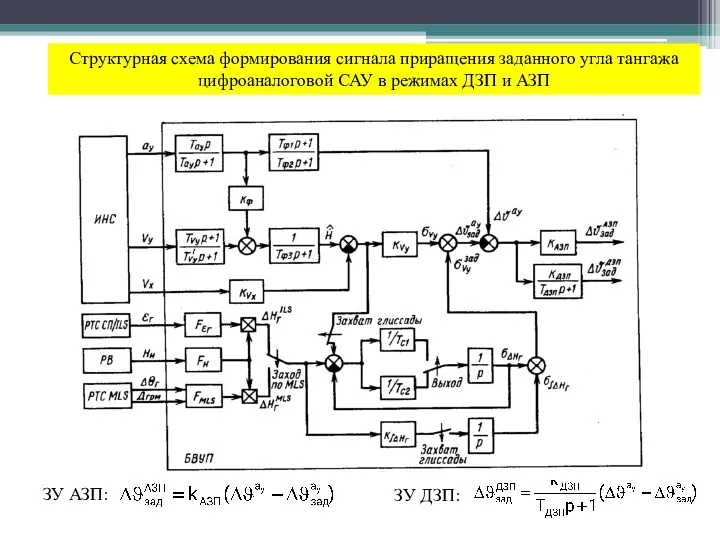
Структурная схема формирования сигнала приращения заданного угла тангажа цифроаналоговой САУ в
Структурная схема формирования сигнала приращения заданного угла тангажа цифроаналоговой САУ в
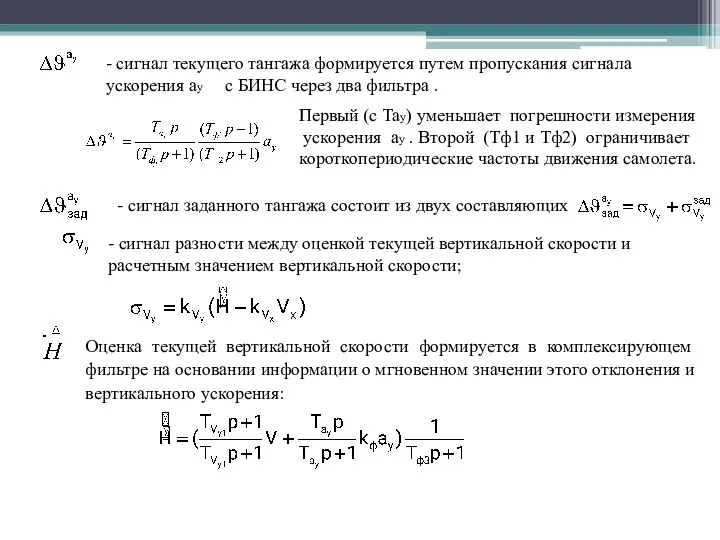
Первый (с Тау) уменьшает погрешности измерения
ускорения ау . Второй (Тф1
Первый (с Тау) уменьшает погрешности измерения
ускорения ау . Второй (Тф1
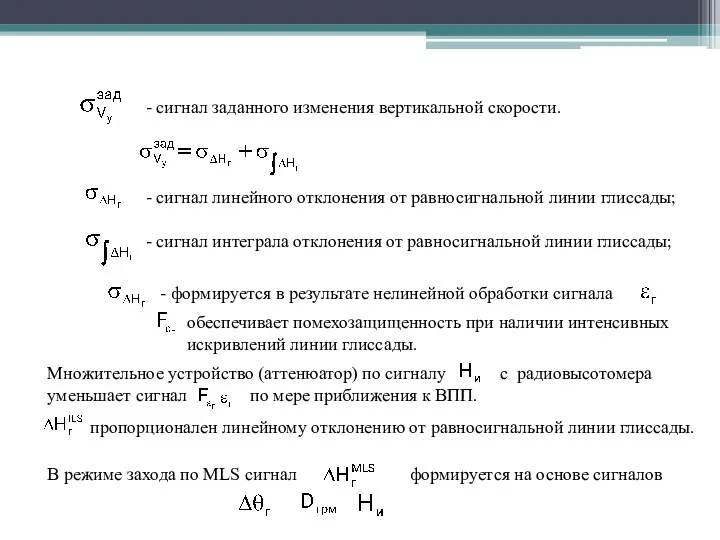
- сигнал заданного изменения вертикальной скорости.
- сигнал линейного отклонения от равносигнальной
- сигнал заданного изменения вертикальной скорости.
- сигнал линейного отклонения от равносигнальной
 Инфекционные заболевания и их классификация
Инфекционные заболевания и их классификация Экологическая безопасность как основа ЗОЖ
Экологическая безопасность как основа ЗОЖ Религия, мировые религии
Религия, мировые религии Контроль качества шероховатости поверхности при различных видах обработки
Контроль качества шероховатости поверхности при различных видах обработки Nice to meet you!
Nice to meet you! Богатства, отданные людям
Богатства, отданные людям Значение транспортного законодательства для страхования грузов и транспортных средств
Значение транспортного законодательства для страхования грузов и транспортных средств Исторические личности IX-XVII веков
Исторические личности IX-XVII веков Экологическая акция Ёлочка, живи!
Экологическая акция Ёлочка, живи! КТД Новогодняя открытка своими руками Новогодний хоровод
КТД Новогодняя открытка своими руками Новогодний хоровод Орфограмма в корне. Готовимся к ГИА
Орфограмма в корне. Готовимся к ГИА Вирус иммунодефицита (ВИЧ
Вирус иммунодефицита (ВИЧ Степенная функция
Степенная функция Альпийские виды лыжного спорта. Скоростной спуск
Альпийские виды лыжного спорта. Скоростной спуск Организация перевозок и управления на транспорте (по видам)
Организация перевозок и управления на транспорте (по видам) Требования безопасности при эксплуатации сосудов, работающих под давлением
Требования безопасности при эксплуатации сосудов, работающих под давлением Типы общественных зданий
Типы общественных зданий терминальные состояния
терминальные состояния Построение (формы) музыки
Построение (формы) музыки Шұжық өндірісі
Шұжық өндірісі Каждой пичужке - моя кормушка
Каждой пичужке - моя кормушка Наш посёлок - Мизур Диск
Наш посёлок - Мизур Диск По одёжке встречают.
По одёжке встречают. Проект Лента Мёбиуса
Проект Лента Мёбиуса Информационный проект Чесма. История морского сражения
Информационный проект Чесма. История морского сражения Конкурс Хочу учиться так! Семинар мечты Финмонополия
Конкурс Хочу учиться так! Семинар мечты Финмонополия Развитие представлений о возникновении жизни на Земле
Развитие представлений о возникновении жизни на Земле Стили речи
Стили речи