- Дискретная математика

Содержание
- 2. Что есть истина ? To them, I said, the truth would be literally noting but the
- 3. О КУРСЕ Д. Д. Предмет курса. Приложения. Предмет – все дискретное, то есть счетные множества, графы,
- 4. ПЛАН. Часть 1 Введение Дискретное и непрерывное Часть 2 ГРАФЫ Рост графов Мир как сеть Часть
- 5. ЧАСТЬ 1 Содержание части 1 Дискретные и непрерывные объекты в математике. Целые рациональные и вещественные (действительные)
- 6. Литература Гаврилов Г. П., Сапоженко А. А. Сборник задач по дискретной математике. — М.: Наука, 1969.
- 7. Литература Основная книга по нейронным сетям- Саймон Хайкин Нейронные сети: полный курс = Neural Networks: A
- 8. Математика не наука Математика - это некий формализованный способ описания, который применим или не применим к
- 9. Структура математической теории Аксиомы Правила вывода (логика) Теоремы (которые применимы или не применимы к реальным объектам)
- 10. Дискретность Дискре́тность (от лат. discretus — разделённый, прерывистый) — свойство, противопоставляемое непрерывности, прерывность. Дискретность — всеобщее
- 11. Дискретное множество Дискретное множество – это счетное множество (то есть множество, элементы которого можно занумеровать натуральными
- 12. Первая неочевидная теорема Множество рациональных чисел – счетное Но сначала напомним некоторые факты о развитии чисел
- 13. Рациональные числа это несократимые дроби m/n, где числитель и знаменатель целые. Обозначается Q . Эти числа
- 14. Иррациональные числа Долгое время в Древней Греции думали, что все числа – рациональны. Однако потом (около
- 15. Теорема Кантора Множество вещественных чисел R - несчетно. Доказательство этой теоремы очень простое, красивое и дальнейшее
- 16. Диагональный процесс и его следствия Теорема об остановке Тьюринга Теорема Геделя
- 17. Трудности Трудности связаны с обработкой больших массивов информации. Жизнь в многомерном пространстве совсем другая Возникает так
- 18. Формальное определение Графа Ориентированный граф определяется как пара (V, E), где V – конечное множество, E
- 19. Граф неформально На самом деле граф очень простая вещь, которая может быть изображена картинкой. Построим граф,
- 20. Картинка Предметом первых задач теории графов были конфигурации, состоящие из точек и линий, связывающих некоторые точки.
- 21. Первая задача о графах
- 22. Степени вершин Если в графе G имеется ребро e=(u,v), то говорят, что вершина v смежна с
- 23. Маршруты Пусть G - неориентированный граф Маршрут – это последовательность ребер e_1, e_2,…, e_n, такая, что
- 24. Цепи Маршрут называется цепью, если каждое ребро встречается в нем не более одного раза, и простой
- 25. Расстояние и диаметр Граф связен, если для каждых двух вершин u, v есть маршрут, который их
- 26. ПУТИ Рассмотрим ориентированный граф G. Путь длины к из вершины u в вершину v – это
- 27. Циклы и связность Циклом в графе называется путь, где начальная и конечная вершина совпадают и содержащий
- 28. Матрица смежности графа G Это квадратная матрица (двумерный массив) δ(I, j), l=1,…N, j=1…N, где N -
- 29. Матрица инцидентности Пусть имеется неориентированный граф G с вершинами v_1,…, v_m и ребрами e_1,… e_ n.
- 30. Матрица инцидентности для орграфов Пусть имеется ориентированный граф G с вершинами v_1,…, v_m и ребрами e_1,…
- 31. Типы графов Лес – ациклический неориентированный граф. Связный ациклический неориентированный граф называется деревом. (без выделенного корня)
- 32. Теория роста графов Теория Эрдеша -Реньи –графы растут случайно. Реальные графы, соответствующие социальным сетям и т
- 33. Рост реальных графов Оказывается, реальные графы имеют ряд общих свойств, и несмотря на их грандиозный размер,
- 34. Свойства реальных графов Свойство 2. Scale free structure Граф устроен, грубо говоря, как страна с городами
- 35. Безмасштабные Графы Свойство 2. Scale free structure Граф устроен, грубо говоря, как страна с городами на
- 36. Граф биохимических реакций
- 37. Булевские функции Б. Ф. от N переменных отображает вектор булевских переменных длины N в булевскую переменную
- 38. Способы задания б. ф. Таблица Логические формулы в том числе КНФ и ДНФ Многочлены Жегалкина (АНФ)
- 39. ДНФ Дизъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет
- 40. КНФ Конъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет
- 41. АНФ Многочлен Жегалкина от булевских Переменных x, z, y, …– это многочлен С коэффициентами 0 или
- 42. Основные булевские функции двух переменных (N=2) Конъюнкция Дизъюнкция Сложение по модулю 2 Импликация Эквиваленция Штрих Шеффера
- 43. Таблицы для N=2 Конъюнкция (OR) 0001 Дизъюнкция (AND) 0111 Импликация → 1011 Штрих Шеффера | 1110
- 44. Сигмоидальная функция
- 45. Суперупрощенная модель ui (t+1) = σ (Σk Kik uk(t) - hi) Индексы i, k в [1,…
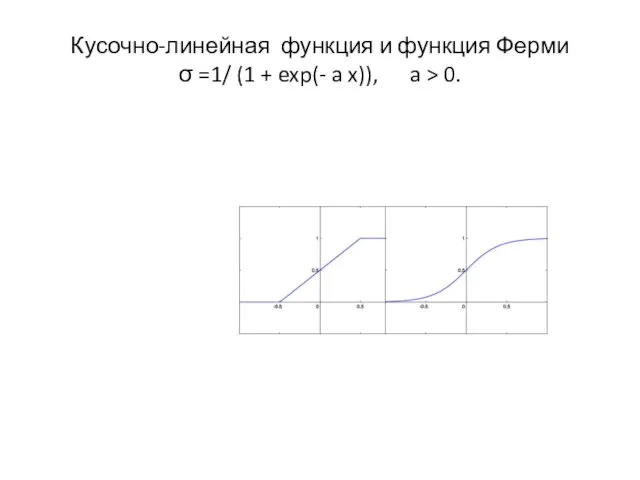
- 46. Примеры функций сигма σ = 1/(1+ exp(-a x)) σ = H(x) (скачок) Кусочно-линейная ( функция σ
- 47. Функция скачка (безграмотный график)
- 48. Кусочно-линейная функция и функция Ферми σ =1/ (1 + exp(- a x)), a > 0.
- 49. Задача классификации Предположим, мы хотим создать автоматическую систему, которая различает два типа объектов, А и B.
- 50. Задача классификации Мы можем рассматривать признак как вектор с k компонентами, или элемент (точку) k -мерного
- 51. Обучение (learning) В задачах классификации нейронные сети обучаются таким образом. Имеются некие обучающие примеры, где ответ
- 52. Математическая формализация схемы обучения моделей ИИ (на примере задачи классификации) Формируется набор признаков (x1 , x2
- 53. Общая схема обучения с учителем Дано - реальный выход устройства d(t) при входе X(t), где X(t)
- 54. Минимизация риска Введем эмпирический риск R = T -1 Σ t=1,T ( d(t) - F(X(t), w(t)))
- 55. Однослойный персептрон Однослойный персептрон получает входной сигнал, заданный вектором x и выдает число y = σ
- 56. Структурная форма
- 57. Моделирование логических функций персептроном Конъюнкция Дизъюнкция Отрицание Демократическое голосование
- 58. Решает ли персептрон все ?? БЫТЬ ИЛИ НЕ БЫТЬ ? Марвин Минский показал, что возможности персептрона
- 59. Персептрон как игра в квадратики и шарики (n=2)
- 60. Геометрическая интерпретация S=0 ↔ w1 x1 + w2 x2 + … wn xn =h Это -
- 61. Пример Минского Иногда квадратики и шарики неразделимы «Исключающее или» (XOR) нереализуемо однослойным персептроном. XOR(x,y)=x+y (mod 2)
- 62. Часть 3 Алгоритмы Алгоритм - формально описанная процедура, получающая исходные данные, называемые также входом алгоритма (input)
- 63. Пример Алгоритма Простейший пример алгоритма автор обнаружил в ирландском баре В городе Ренн (Франция), где он
- 64. Численные характеристики алгоритмов Время работы и требуемая память ( running time T and memory M)
- 65. Время работы Алгоритма Скорость алгоритма определяется зависимостью времени работы (Running time) от размера входа (input size).
- 66. Пример: Оценка времени работы алгоритма Гаусса. Пусть мы решаем систему N уравнений с N неизвестными. Матрица
- 67. Практическое применение Каковы практические следствия этой формулы (как ее практически применить)? Этот вопрос тем более актуален,
- 68. Простые, сложные и неразрешимые задачи. Простые, когда время решения растет как степень размера входа T(|X|) (running
- 69. Сложные (hard) Сложные, когда время решения растет, в общем случае, намного быстрее, чем степень размера входа.
- 70. Неразрешимые ( non decidable) Вообще алгоритмически неразрешимые, то есть нет алгоритма, который для любого входа выдает
- 71. Зацикливание программ Гениальный математик Ален Тьюринг доказал Важную Теорему В общем случае проблема остановки алгоритмически не
- 72. Примеры Пример простой задачи - решение системы линейных уравнений. Она решается в полиномиальное время методом Гаусса.
- 73. Поиск кратчайшего пути в графе Пример простой задачи. Введем так называемый взвешенный (weighted) граф (то есть
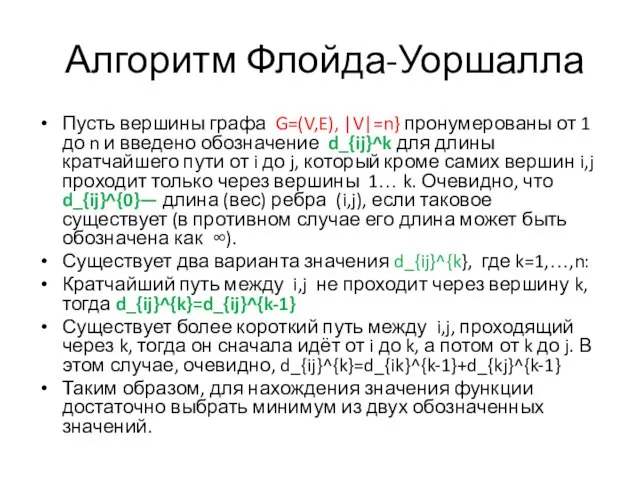
- 74. Алгоритм Флойда-Уоршалла Пусть вершины графа G=(V,E), |V|=n} пронумерованы от 1 до n и введено обозначение d_{ij}^k
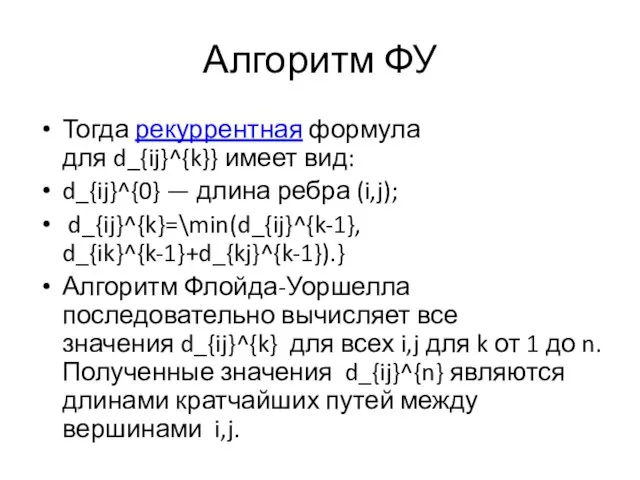
- 75. Алгоритм ФУ Тогда рекуррентная формула для d_{ij}^{k}} имеет вид: d_{ij}^{0} — длина ребра (i,j); d_{ij}^{k}=\min(d_{ij}^{k-1}, d_{ik}^{k-1}+d_{kj}^{k-1}).}
- 76. Псевдокод ФУ for k = 1 to n for i = 1 to n for j
- 77. Задача коммивояжера - трудная Пример сложной задачи – задача коммивояжера. Предположим, некий человек собирается посетить (используя
- 78. Алгоритм обучения однослойного персептрона
- 79. Первые шаги Шаг 1. Инициализация синаптических весов и смещения: Значения синаптических весов wi(0) (0 Обозначение: wi(t)
- 80. Формула перенастройки (адаптации весов) Шаг 4. адаптация (настройка) значений весов: где r – параметр обучения (меньше
- 81. Пример программы на Матлабе Напишите программу по этому алгоритму for m=1:N out=out+ wout(m)*x(m); end; if(ssout >
- 82. Пример программы delta(k)=y(k)-yout(k); for i=1:N wout(i)=wout(i) + r*delta(k)*x(i); end;
- 83. Иллюстрация работы алгоритма
- 84. Эволюция синаптических весов w1 … wm
- 85. Эволюция весов
- 86. Откуда появился этот алгоритм Это алгоритм градиентного спуска, который ищет параметры, чтобы минимизировать ошибку. Алгоритм итеративный
- 87. Градиентный спуск Минимизация функции R(w) итеративно, движением по градиенту grad R(w) w(t+1)=w(t) + r grad R(w)
- 88. Кое что об алгоритмах Алгоритм получает вход X и выдает ответ Y Размер входа обозначаем |X|
- 89. Оценка скорости работы алгоритма Если время работы T не больше чем постоянная умножить на f(|X|) пишем
- 90. Решаемое и не решаемое Задача считается трудной для алгоритма, если максимальное время работы алгоритма T(|X|) растет
- 91. Трудное и легкое в среднем и некоторые замечания Задача линейного программирования для вещественных переменных теоретически трудная
- 92. Жадные алгоритмы Задача о деньгах. Получить нужную сумму с помощью наименьшего числа купюр Алгоритм – делаем
- 93. Градиентный спуск Минимизация функции F(X) итеративно, движением по градиенту grad F(X) Работает для выпуклых вниз функций
- 94. Динамическое программирование Метод предложен Р. Беллманом для задач оптимального управления. Основная идея- это работает, если задача
- 95. Принцип оптимальности подзадач Пример. Принцип Ферма. Допустим, мы должны найти оптимальную траекторию из А в B.
- 96. Архитектура многослойного персептрона
- 97. Абсолютное разделение ФУНДАМЕНТАЛЬНАЯ ТЕОРЕМА. Пусть имеется произвольное множество синих точек и непересекающееся с ним множество красных
- 98. Некоторые задачи для практики 1)Сколько существует булевских функций От двух переменных ? От трех ? 2)
- 99. Некоторые задачи для практики Найти многослойный персептрон минимальной архитектуры, моделирующий XOR Построить многослойный персептрон, моделирующий выборы
- 100. Нечеткая логика (fuzzy logic) задание Сила ++ Моисеенко + + Иванов Сергей + Траков + Большаков
- 102. Скачать презентацию
Что есть истина ?
To them, I said, the truth would
Что есть истина ?
To them, I said, the truth would
О КУРСЕ Д. Д.
Предмет курса. Приложения.
Предмет – все дискретное, то
О КУРСЕ Д. Д.
Предмет курса. Приложения.
Предмет – все дискретное, то
ПЛАН.
Часть 1 Введение Дискретное и непрерывное
Часть 2 ГРАФЫ Рост графов Мир
ПЛАН.
Часть 1 Введение Дискретное и непрерывное
Часть 2 ГРАФЫ Рост графов Мир
ЧАСТЬ 1 Содержание части 1
Дискретные и непрерывные объекты в математике.
ЧАСТЬ 1 Содержание части 1
Дискретные и непрерывные объекты в математике.
Литература
Гаврилов Г. П., Сапоженко А. А. Сборник задач по дискретной
Литература
Гаврилов Г. П., Сапоженко А. А. Сборник задач по дискретной
Литература
Основная книга по нейронным сетям-
Саймон Хайкин Нейронные сети: полный курс =
Литература
Основная книга по нейронным сетям-
Саймон Хайкин Нейронные сети: полный курс =
Математика не наука
Математика - это некий формализованный способ описания, который
Математика не наука
Математика - это некий формализованный способ описания, который
Структура математической теории
Аксиомы
Правила вывода (логика)
Теоремы
(которые применимы или не применимы к
Структура математической теории
Аксиомы
Правила вывода (логика)
Теоремы
(которые применимы или не применимы к
Дискретность
Дискре́тность (от лат. discretus — разделённый, прерывистый) — свойство, противопоставляемое непрерывности, прерывность. Дискретность — всеобщее свойство материи, под
Дискретность
Дискре́тность (от лат. discretus — разделённый, прерывистый) — свойство, противопоставляемое непрерывности, прерывность. Дискретность — всеобщее свойство материи, под
Дискретное множество
Дискретное множество – это счетное множество
(то есть множество, элементы
Дискретное множество
Дискретное множество – это счетное множество
(то есть множество, элементы
Первая неочевидная теорема
Множество рациональных чисел – счетное
Но сначала напомним некоторые
Первая неочевидная теорема
Множество рациональных чисел – счетное
Но сначала напомним некоторые
Рациональные числа это несократимые дроби m/n, где числитель и
Рациональные числа это несократимые дроби m/n, где числитель и
Иррациональные числа
Долгое время в Древней Греции думали, что все числа
Иррациональные числа
Долгое время в Древней Греции думали, что все числа
Теорема Кантора
Множество вещественных чисел R - несчетно.
Доказательство этой теоремы очень
Теорема Кантора
Множество вещественных чисел R - несчетно.
Доказательство этой теоремы очень
Диагональный процесс и его следствия
Теорема об остановке Тьюринга
Теорема Геделя
Диагональный процесс и его следствия
Теорема об остановке Тьюринга
Теорема Геделя
Трудности
Трудности связаны с обработкой больших
массивов информации. Жизнь в
многомерном пространстве
Трудности
Трудности связаны с обработкой больших
массивов информации. Жизнь в
многомерном пространстве
Формальное определение Графа
Ориентированный граф определяется как пара (V, E), где V
Формальное определение Графа
Ориентированный граф определяется как пара (V, E), где V
Граф неформально
На самом деле граф очень простая вещь, которая может быть
Граф неформально
На самом деле граф очень простая вещь, которая может быть
Картинка
Предметом первых задач теории графов были конфигурации, состоящие из точек и
Картинка
Предметом первых задач теории графов были конфигурации, состоящие из точек и
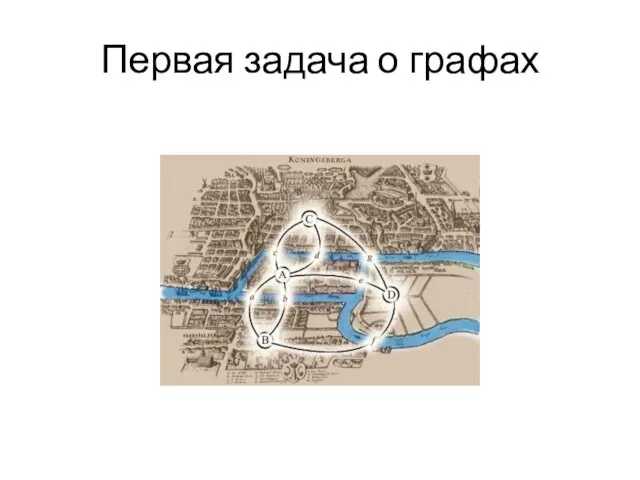
Первая задача о графах
Первая задача о графах
Степени вершин
Если в графе G имеется ребро e=(u,v), то говорят, что
Степени вершин
Если в графе G имеется ребро e=(u,v), то говорят, что
Маршруты
Пусть G - неориентированный граф
Маршрут – это последовательность ребер e_1,
Маршруты
Пусть G - неориентированный граф
Маршрут – это последовательность ребер e_1,
Цепи
Маршрут называется цепью, если каждое ребро встречается в нем не более
Цепи
Маршрут называется цепью, если каждое ребро встречается в нем не более
Расстояние и диаметр
Граф связен, если для каждых двух вершин u, v
Расстояние и диаметр
Граф связен, если для каждых двух вершин u, v
ПУТИ
Рассмотрим ориентированный граф G.
Путь длины к из вершины u в вершину
ПУТИ
Рассмотрим ориентированный граф G.
Путь длины к из вершины u в вершину
Циклы и связность
Циклом в графе называется путь, где начальная и конечная
Циклы и связность
Циклом в графе называется путь, где начальная и конечная
Матрица смежности графа G
Это квадратная матрица (двумерный массив) δ(I, j), l=1,…N,
Матрица смежности графа G
Это квадратная матрица (двумерный массив) δ(I, j), l=1,…N,
Матрица инцидентности
Пусть имеется неориентированный граф G с вершинами v_1,…, v_m и
Матрица инцидентности
Пусть имеется неориентированный граф G с вершинами v_1,…, v_m и
Матрица инцидентности для орграфов
Пусть имеется ориентированный граф G с вершинами v_1,…,
Матрица инцидентности для орграфов
Пусть имеется ориентированный граф G с вершинами v_1,…,
Типы графов
Лес – ациклический неориентированный граф.
Связный ациклический неориентированный граф называется
Типы графов
Лес – ациклический неориентированный граф.
Связный ациклический неориентированный граф называется
Теория роста графов
Теория Эрдеша -Реньи –графы растут случайно. Реальные графы, соответствующие
Теория роста графов
Теория Эрдеша -Реньи –графы растут случайно. Реальные графы, соответствующие
Рост реальных графов
Оказывается, реальные графы имеют ряд общих свойств, и несмотря
Рост реальных графов
Оказывается, реальные графы имеют ряд общих свойств, и несмотря
Свойства реальных графов
Свойство 2. Scale free structure
Граф устроен, грубо говоря,
Свойства реальных графов
Свойство 2. Scale free structure
Граф устроен, грубо говоря,
Безмасштабные Графы
Свойство 2. Scale free structure
Граф устроен, грубо говоря,
Безмасштабные Графы
Свойство 2. Scale free structure
Граф устроен, грубо говоря,
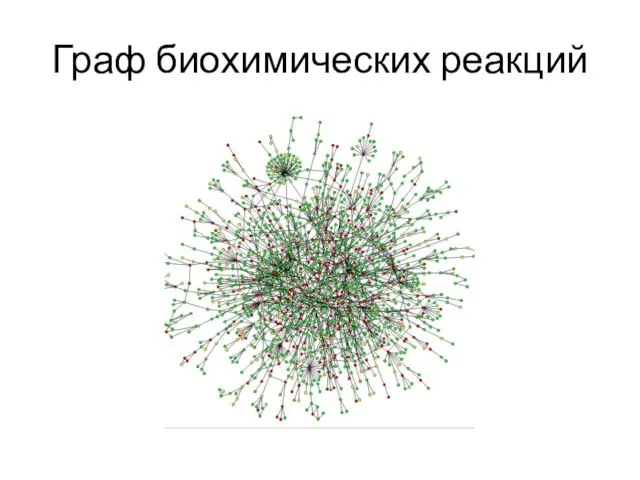
Граф биохимических реакций
Граф биохимических реакций
Булевские функции
Б. Ф. от N переменных отображает вектор булевских переменных длины
Булевские функции
Б. Ф. от N переменных отображает вектор булевских переменных длины
Способы задания б. ф.
Таблица
Логические формулы в том числе КНФ и
Способы задания б. ф.
Таблица
Логические формулы в том числе КНФ и

ДНФ
Дизъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет вид дизъюнкции конъюнкций литералов. Любая булева
ДНФ
Дизъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет вид дизъюнкции конъюнкций литералов. Любая булева
КНФ
Конъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет вид конъюнкции дизъюнкций литералов. Любая булева
КНФ
Конъюнкти́вная норма́льная фо́рма (ДНФ) в булевой логике — нормальная форма, в которой булева формула имеет вид конъюнкции дизъюнкций литералов. Любая булева
АНФ
Многочлен Жегалкина от булевских
Переменных x, z, y, …– это многочлен
С
АНФ
Многочлен Жегалкина от булевских
Переменных x, z, y, …– это многочлен
С
Основные булевские функции двух переменных (N=2)
Конъюнкция
Дизъюнкция
Сложение по модулю 2
Основные булевские функции двух переменных (N=2)
Конъюнкция
Дизъюнкция
Сложение по модулю 2
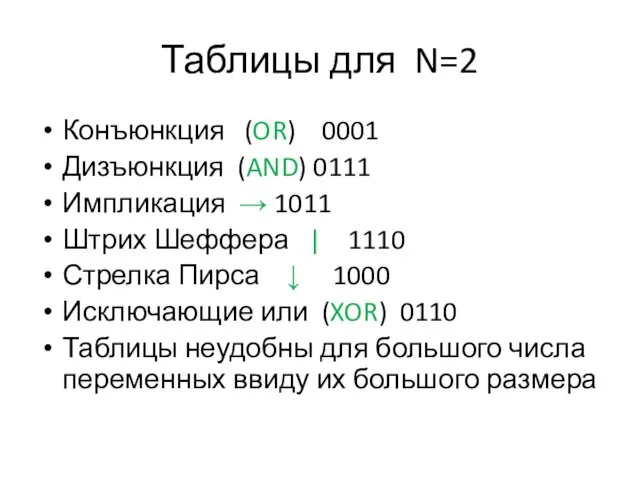
Таблицы для N=2
Конъюнкция (OR) 0001
Дизъюнкция (AND) 0111
Импликация → 1011
Штрих Шеффера |
Таблицы для N=2
Конъюнкция (OR) 0001
Дизъюнкция (AND) 0111
Импликация → 1011
Штрих Шеффера |
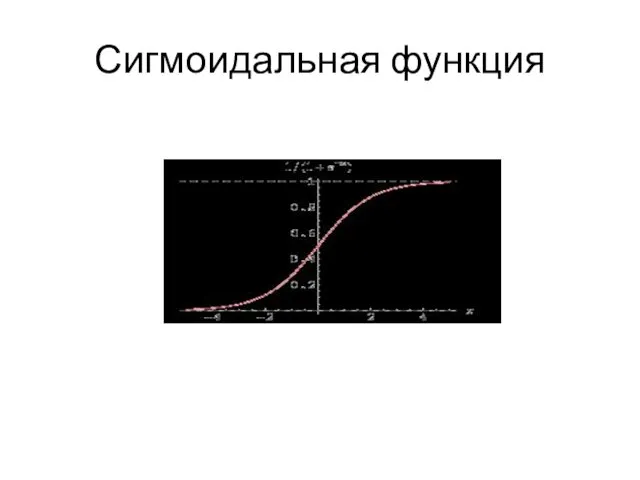
Сигмоидальная функция
Сигмоидальная функция
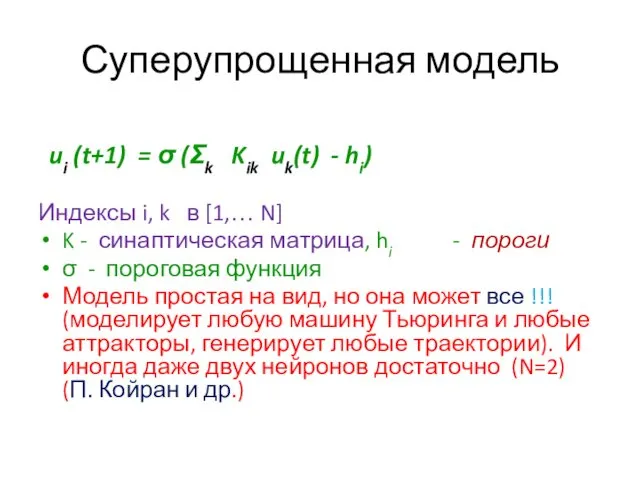
Суперупрощенная модель
ui (t+1) = σ (Σk Kik uk(t) -
Суперупрощенная модель
ui (t+1) = σ (Σk Kik uk(t) -
Примеры функций сигма
σ = 1/(1+ exp(-a x))
σ = H(x)
Примеры функций сигма
σ = 1/(1+ exp(-a x))
σ = H(x)
Функция скачка (безграмотный график)
Функция скачка (безграмотный график)
Кусочно-линейная функция и функция Ферми
σ =1/ (1 + exp(- a
Кусочно-линейная функция и функция Ферми σ =1/ (1 + exp(- a
Задача классификации
Предположим, мы хотим создать автоматическую систему, которая различает два типа
Задача классификации
Предположим, мы хотим создать автоматическую систему, которая различает два типа
Задача классификации
Мы можем рассматривать признак как вектор с k компонентами, или
Задача классификации
Мы можем рассматривать признак как вектор с k компонентами, или
Обучение (learning)
В задачах классификации нейронные сети обучаются таким образом.
Имеются некие
Обучение (learning)
В задачах классификации нейронные сети обучаются таким образом.
Имеются некие
Математическая формализация схемы обучения моделей ИИ
(на примере задачи классификации)
Формируется набор признаков
Математическая формализация схемы обучения моделей ИИ
(на примере задачи классификации)
Формируется набор признаков
Общая схема обучения с учителем
Дано - реальный выход устройства d(t) при
Общая схема обучения с учителем
Дано - реальный выход устройства d(t) при
Минимизация риска
Введем эмпирический риск
R = T -1 Σ t=1,T ( d(t)
Минимизация риска
Введем эмпирический риск
R = T -1 Σ t=1,T ( d(t)
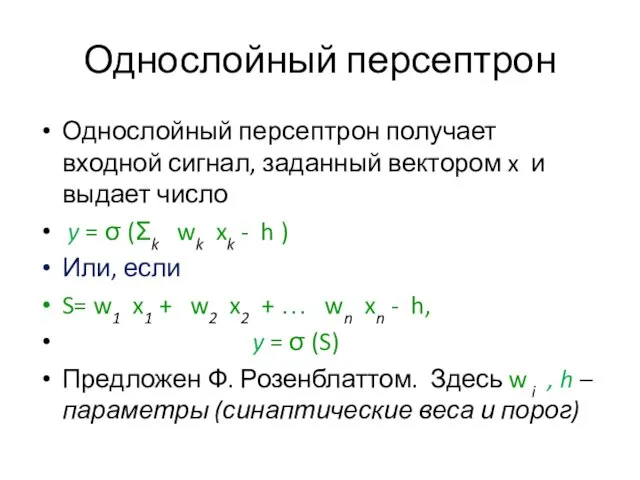
Однослойный персептрон
Однослойный персептрон получает входной сигнал, заданный вектором x и выдает
Однослойный персептрон
Однослойный персептрон получает входной сигнал, заданный вектором x и выдает
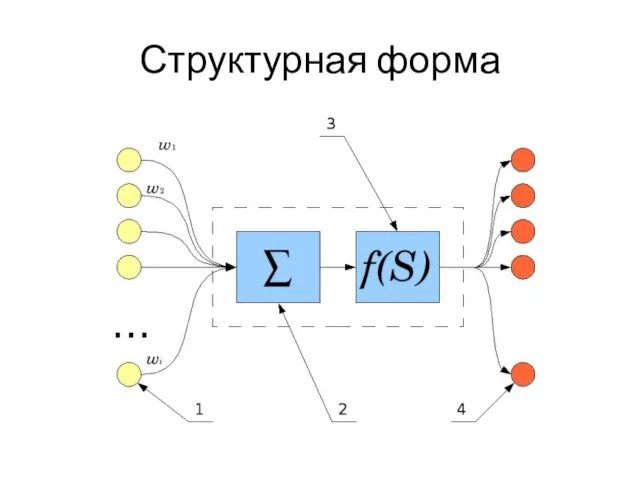
Структурная форма
Структурная форма
Моделирование логических функций персептроном
Конъюнкция
Дизъюнкция
Отрицание
Демократическое голосование
Моделирование логических функций персептроном
Конъюнкция
Дизъюнкция
Отрицание
Демократическое голосование
Решает ли персептрон все ??
БЫТЬ ИЛИ НЕ БЫТЬ ?
Марвин
Решает ли персептрон все ??
БЫТЬ ИЛИ НЕ БЫТЬ ?
Марвин
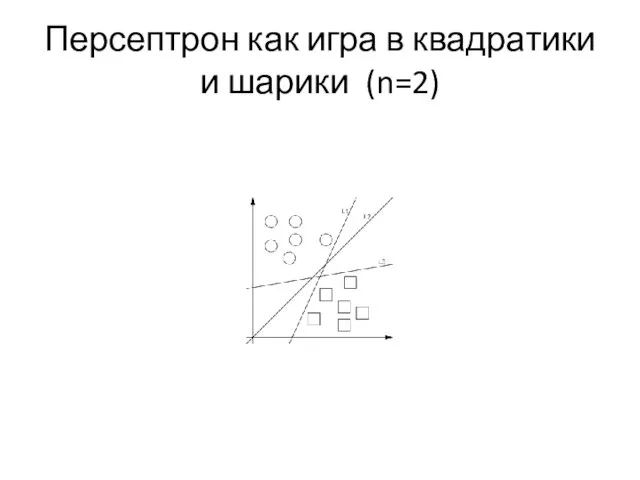
Персептрон как игра в квадратики и шарики (n=2)
Персептрон как игра в квадратики и шарики (n=2)
Геометрическая интерпретация
S=0 ↔ w1 x1 + w2 x2 + … wn
Геометрическая интерпретация
S=0 ↔ w1 x1 + w2 x2 + … wn
Пример Минского
Иногда квадратики и шарики неразделимы
«Исключающее или» (XOR) нереализуемо однослойным
Пример Минского
Иногда квадратики и шарики неразделимы
«Исключающее или» (XOR) нереализуемо однослойным
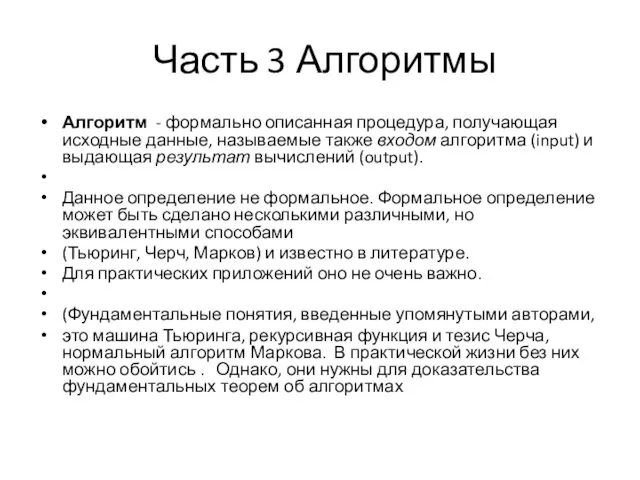
Часть 3 Алгоритмы
Алгоритм - формально описанная процедура, получающая исходные данные,
Часть 3 Алгоритмы
Алгоритм - формально описанная процедура, получающая исходные данные,
Пример Алгоритма
Простейший пример алгоритма автор обнаружил в ирландском баре
В
Пример Алгоритма
Простейший пример алгоритма автор обнаружил в ирландском баре
В
Численные характеристики алгоритмов
Время работы и требуемая память
( running time T
Численные характеристики алгоритмов
Время работы и требуемая память
( running time T

Время работы Алгоритма
Скорость алгоритма определяется зависимостью времени работы (Running time)
Время работы Алгоритма
Скорость алгоритма определяется зависимостью времени работы (Running time)
Пример: Оценка времени работы алгоритма Гаусса.
Пусть мы решаем систему
Пример: Оценка времени работы алгоритма Гаусса.
Пусть мы решаем систему
Практическое применение
Каковы практические следствия этой формулы (как ее практически применить)? Этот
Практическое применение
Каковы практические следствия этой формулы (как ее практически применить)? Этот
Простые, сложные и неразрешимые задачи.
Простые, когда время решения растет как
Простые, сложные и неразрешимые задачи.
Простые, когда время решения растет как
Сложные (hard)
Сложные, когда время решения растет, в общем случае, намного быстрее,
Сложные (hard)
Сложные, когда время решения растет, в общем случае, намного быстрее,
Неразрешимые ( non decidable)
Вообще алгоритмически неразрешимые, то есть нет алгоритма,
который
Неразрешимые ( non decidable)
Вообще алгоритмически неразрешимые, то есть нет алгоритма,
который
Зацикливание программ
Гениальный математик Ален Тьюринг доказал Важную Теорему
В общем случае
Зацикливание программ
Гениальный математик Ален Тьюринг доказал Важную Теорему
В общем случае
Примеры
Пример простой задачи - решение системы линейных уравнений.
Она решается
Примеры
Пример простой задачи - решение системы линейных уравнений.
Она решается
Поиск кратчайшего пути в графе
Пример простой задачи.
Введем так называемый
Поиск кратчайшего пути в графе
Пример простой задачи.
Введем так называемый
Алгоритм Флойда-Уоршалла
Пусть вершины графа G=(V,E), |V|=n} пронумерованы от 1 до n и введено
Алгоритм Флойда-Уоршалла
Пусть вершины графа G=(V,E), |V|=n} пронумерованы от 1 до n и введено
Алгоритм ФУ
Тогда рекуррентная формула для d_{ij}^{k}} имеет вид:
d_{ij}^{0} — длина ребра (i,j);
d_{ij}^{k}=\min(d_{ij}^{k-1}, d_{ik}^{k-1}+d_{kj}^{k-1}).}
Алгоритм Флойда-Уоршелла последовательно вычисляет
Алгоритм ФУ
Тогда рекуррентная формула для d_{ij}^{k}} имеет вид:
d_{ij}^{0} — длина ребра (i,j);
d_{ij}^{k}=\min(d_{ij}^{k-1}, d_{ik}^{k-1}+d_{kj}^{k-1}).}
Алгоритм Флойда-Уоршелла последовательно вычисляет
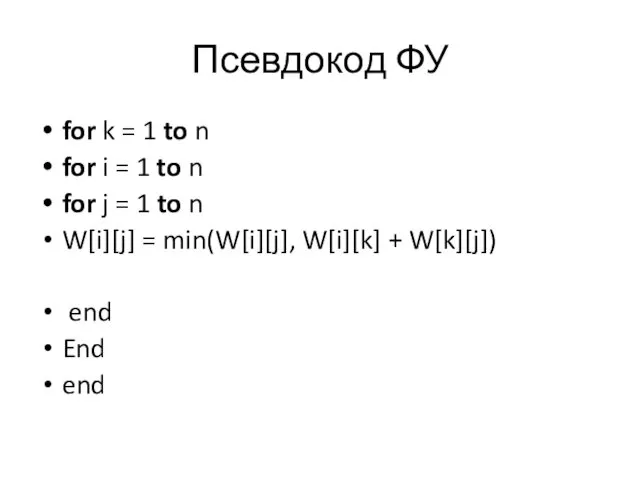
Псевдокод ФУ
for k = 1 to n
for i = 1
Псевдокод ФУ
for k = 1 to n
for i = 1
Задача коммивояжера - трудная
Пример сложной задачи – задача коммивояжера.
Предположим, некий
Задача коммивояжера - трудная
Пример сложной задачи – задача коммивояжера.
Предположим, некий
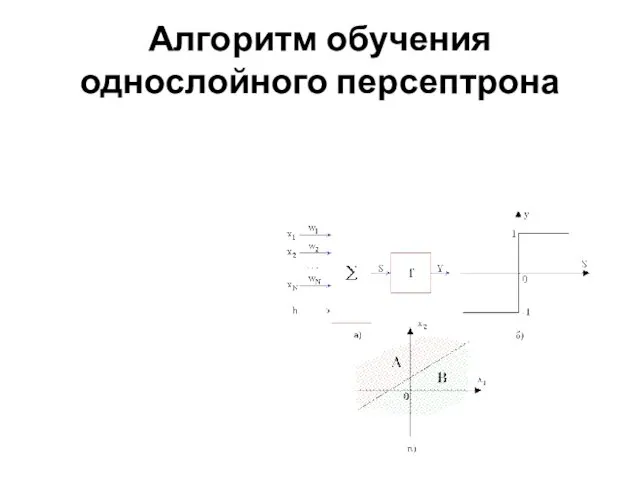
Алгоритм обучения однослойного персептрона
Алгоритм обучения однослойного персептрона
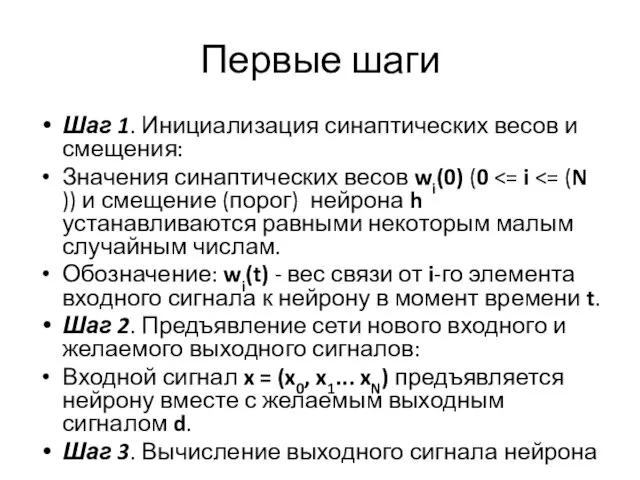
Первые шаги
Шаг 1. Инициализация синаптических весов и смещения:
Значения синаптических весов
Первые шаги
Шаг 1. Инициализация синаптических весов и смещения:
Значения синаптических весов
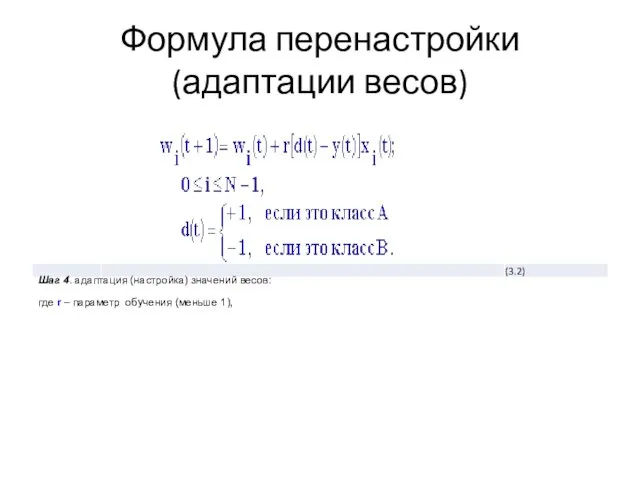
Формула перенастройки (адаптации весов)
Шаг 4. адаптация (настройка) значений весов:
где r
Формула перенастройки (адаптации весов)
Шаг 4. адаптация (настройка) значений весов:
где r
Пример программы на Матлабе
Напишите программу по этому алгоритму
for m=1:N
out=out+ wout(m)*x(m);
end;
if(ssout >
Пример программы на Матлабе
Напишите программу по этому алгоритму
for m=1:N
out=out+ wout(m)*x(m);
end;
if(ssout >
Пример программы
delta(k)=y(k)-yout(k);
for i=1:N
wout(i)=wout(i) + r*delta(k)*x(i);
end;
Пример программы
delta(k)=y(k)-yout(k);
for i=1:N
wout(i)=wout(i) + r*delta(k)*x(i);
end;
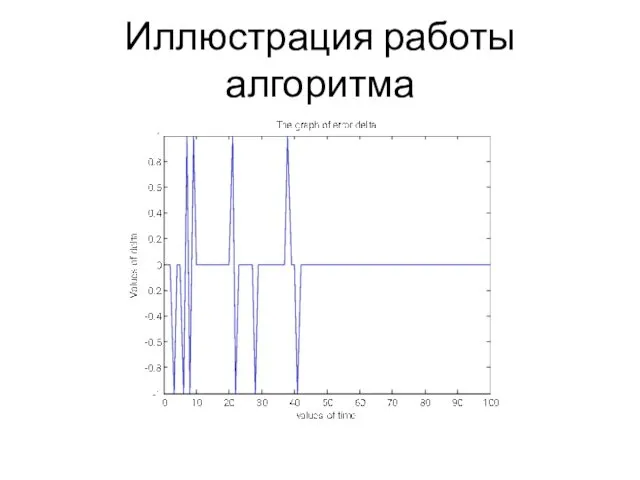
Иллюстрация работы алгоритма
Иллюстрация работы алгоритма
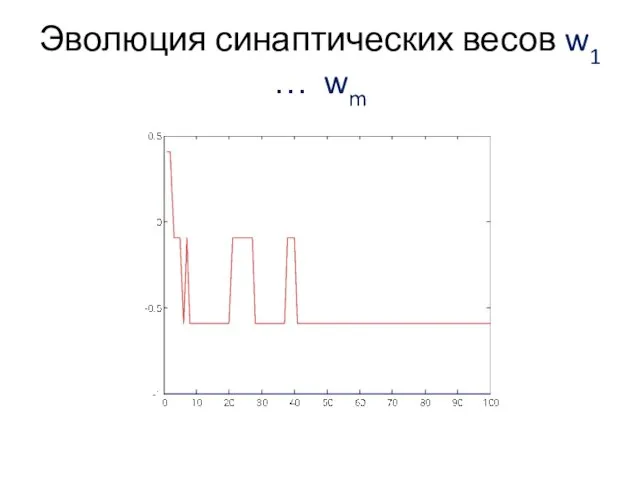
Эволюция синаптических весов w1 … wm
Эволюция синаптических весов w1 … wm
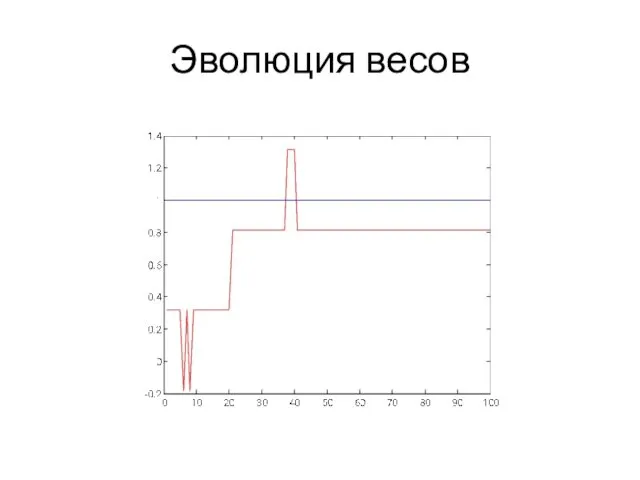
Эволюция весов
Эволюция весов

Откуда появился этот алгоритм
Это алгоритм градиентного спуска, который ищет параметры,
Откуда появился этот алгоритм
Это алгоритм градиентного спуска, который ищет параметры,
Градиентный спуск
Минимизация функции R(w) итеративно, движением по градиенту grad R(w)
w(t+1)=w(t)
Градиентный спуск
Минимизация функции R(w) итеративно, движением по градиенту grad R(w)
w(t+1)=w(t)
Кое что об алгоритмах
Алгоритм получает вход X и выдает ответ Y
Размер
Кое что об алгоритмах
Алгоритм получает вход X и выдает ответ Y
Размер
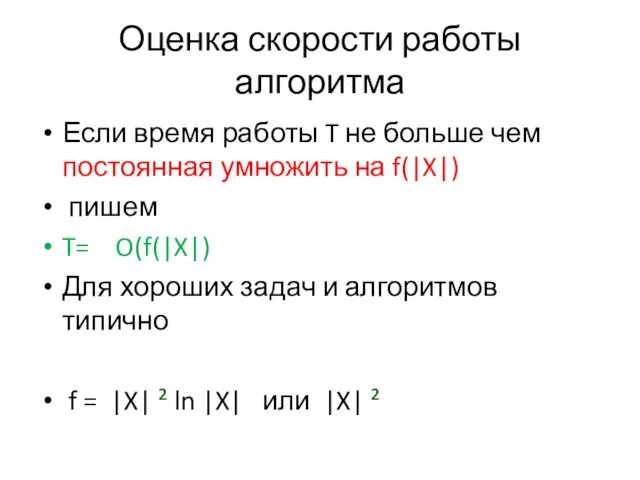
Оценка скорости работы алгоритма
Если время работы T не больше чем постоянная
Оценка скорости работы алгоритма
Если время работы T не больше чем постоянная
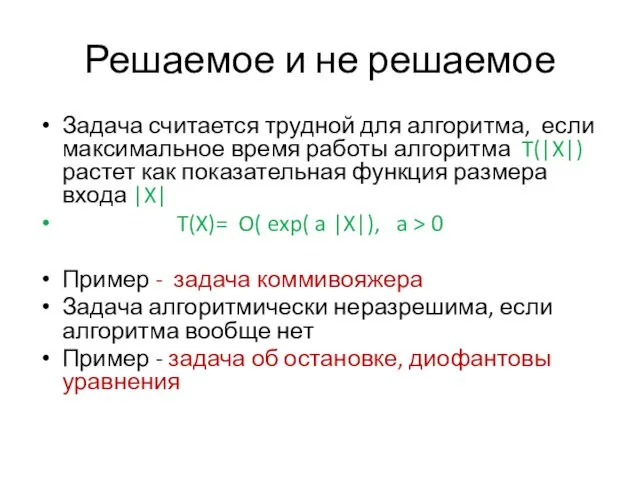
Решаемое и не решаемое
Задача считается трудной для алгоритма, если максимальное время
Решаемое и не решаемое
Задача считается трудной для алгоритма, если максимальное время
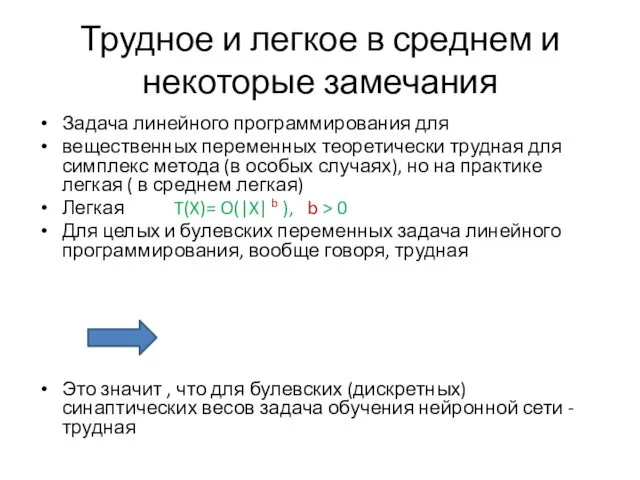
Трудное и легкое в среднем и некоторые замечания
Задача линейного программирования для
Трудное и легкое в среднем и некоторые замечания
Задача линейного программирования для
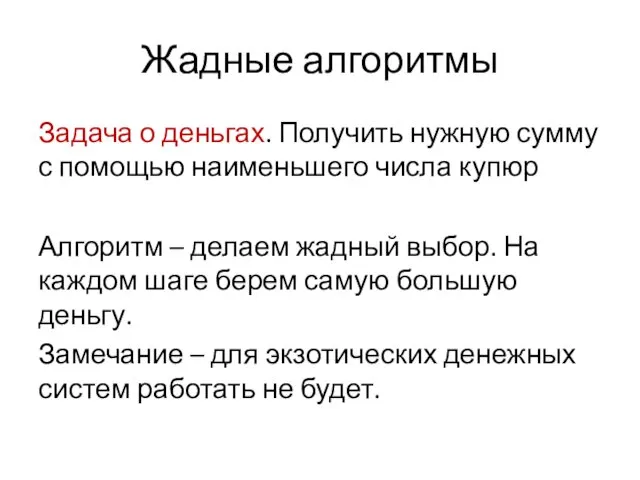
Жадные алгоритмы
Задача о деньгах. Получить нужную сумму с помощью наименьшего числа
Жадные алгоритмы
Задача о деньгах. Получить нужную сумму с помощью наименьшего числа
Градиентный спуск
Минимизация функции F(X) итеративно, движением по градиенту grad F(X)
Работает для
Градиентный спуск
Минимизация функции F(X) итеративно, движением по градиенту grad F(X)
Работает для
Динамическое программирование
Метод предложен Р. Беллманом для задач оптимального управления. Основная идея-
Динамическое программирование
Метод предложен Р. Беллманом для задач оптимального управления. Основная идея-
Принцип оптимальности подзадач
Пример. Принцип Ферма.
Допустим, мы должны найти оптимальную траекторию
Принцип оптимальности подзадач
Пример. Принцип Ферма.
Допустим, мы должны найти оптимальную траекторию
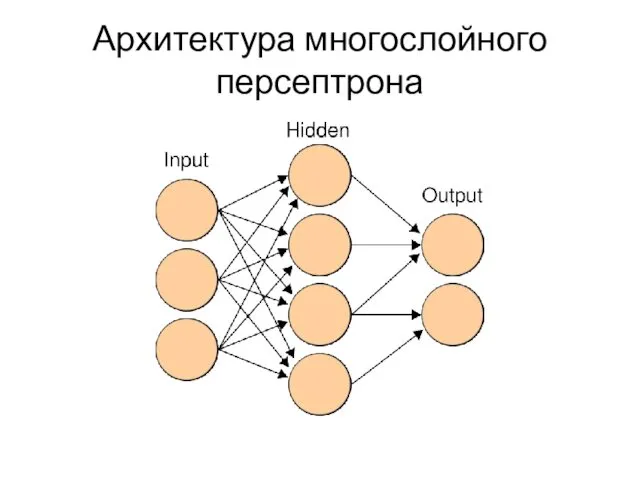
Архитектура многослойного персептрона
Архитектура многослойного персептрона
Абсолютное разделение
ФУНДАМЕНТАЛЬНАЯ ТЕОРЕМА. Пусть имеется произвольное множество синих точек и непересекающееся
Абсолютное разделение
ФУНДАМЕНТАЛЬНАЯ ТЕОРЕМА. Пусть имеется произвольное множество синих точек и непересекающееся
Некоторые задачи для практики
1)Сколько существует булевских функций
От двух переменных ?
Некоторые задачи для практики
1)Сколько существует булевских функций
От двух переменных ?
Некоторые задачи для практики
Найти многослойный персептрон минимальной архитектуры, моделирующий XOR
Построить многослойный
Некоторые задачи для практики
Найти многослойный персептрон минимальной архитектуры, моделирующий XOR
Построить многослойный
Нечеткая логика (fuzzy logic)
задание
Сила ++
Моисеенко + +
Иванов Сергей
Нечеткая логика (fuzzy logic)
задание
Сила ++
Моисеенко + +
Иванов Сергей
 Неделя дежурств. А ты готов стать лидером?
Неделя дежурств. А ты готов стать лидером? Плесень и условия ее появления. 6 класс
Плесень и условия ее появления. 6 класс Интерактивная викторина Диснеевские принцессы
Интерактивная викторина Диснеевские принцессы Способы крепления фрезерного инструмента
Способы крепления фрезерного инструмента Raccoon lesson 1 Degrees of comparison + kids box 3 p 4
Raccoon lesson 1 Degrees of comparison + kids box 3 p 4 Внешний вид курильщика
Внешний вид курильщика Мастер-класс для родителей Использование нетрадиционных пальчиковых игр для формирования речевых навыков у детей дошкольного возраста
Мастер-класс для родителей Использование нетрадиционных пальчиковых игр для формирования речевых навыков у детей дошкольного возраста Учебный проект по математике по теме: Дроби вокруг нас
Учебный проект по математике по теме: Дроби вокруг нас Основы вентиляции и кондиционирования
Основы вентиляции и кондиционирования Презентация: Япония,11 класс
Презентация: Япония,11 класс Общая характеристика зарубежной литературы первой половины ХХ века
Общая характеристика зарубежной литературы первой половины ХХ века ИНФОРМАЦИОННО-КОММУНИКАЦИОННЫЕ ТЕХНОЛОГИИ В ДЕТСКОМ САДУ
ИНФОРМАЦИОННО-КОММУНИКАЦИОННЫЕ ТЕХНОЛОГИИ В ДЕТСКОМ САДУ Путешествие в космос
Путешествие в космос Устройство и эксплуатация системы централизованного водоснабжения населенных пунктов. Наружные системы водоснабжения
Устройство и эксплуатация системы централизованного водоснабжения населенных пунктов. Наружные системы водоснабжения К вопросу об энергоэффективности
К вопросу об энергоэффективности Геодезические работы при изысканиях и пректировании линейных сооружений
Геодезические работы при изысканиях и пректировании линейных сооружений Біблія
Біблія Типичные неотложные состояния
Типичные неотложные состояния Подростковый кризис
Подростковый кризис ОАО Бугульминский электронасосный завод
ОАО Бугульминский электронасосный завод Речевые игры как метод коррекции ТНР
Речевые игры как метод коррекции ТНР Связь имени прилагательного с именем существительным
Связь имени прилагательного с именем существительным Германия (11 класс)
Германия (11 класс) Фонарик из цветной бумаги и картона
Фонарик из цветной бумаги и картона Топ-10 самых опасных растений в мире
Топ-10 самых опасных растений в мире Организация контроля качества в гражданской авиации. Контроль качества авиаГСМ при хранении, перекачках и выдаче на заправку
Организация контроля качества в гражданской авиации. Контроль качества авиаГСМ при хранении, перекачках и выдаче на заправку Тевтонский орден
Тевтонский орден Мои проекты
Мои проекты