- Электрические датчики механических величин

Содержание
- 2. 3.1. Датчики линейного и углового перемещения 3.2. Датчики усилия 3.3. Датчики скорости вращения. «ЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ МЕХАНИЧЕСКИХ
- 3. Датчики линейного и углового перемещения Датчик - это устройство, преобразующее входное воздействие любой физической величины в
- 4. Датчики линейного и углового перемещения Датчики линейного перемещения. По принципу действия бывают: • Емкостными; • Оптическими;
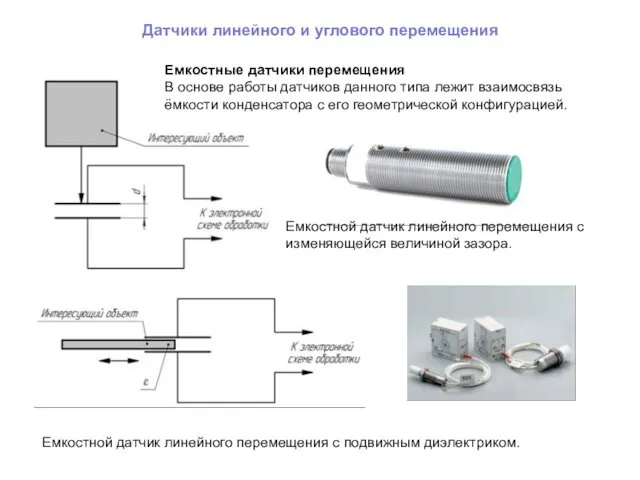
- 5. Датчики линейного и углового перемещения Емкостной датчик линейного перемещения с изменяющейся величиной зазора. Емкостной датчик линейного
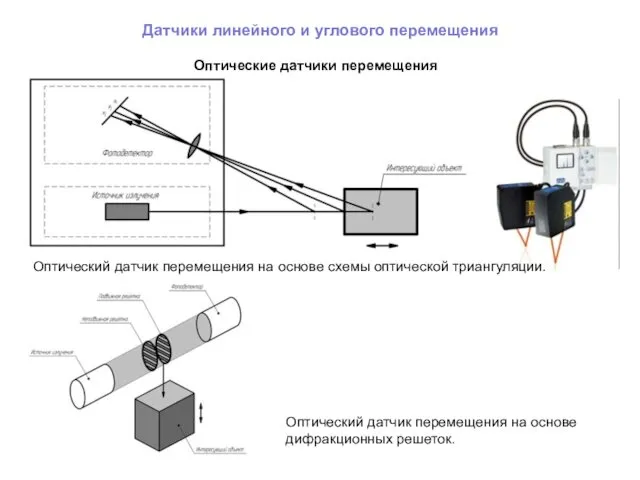
- 6. Датчики линейного и углового перемещения Оптические датчики перемещения Оптический датчик перемещения на основе схемы оптической триангуляции.
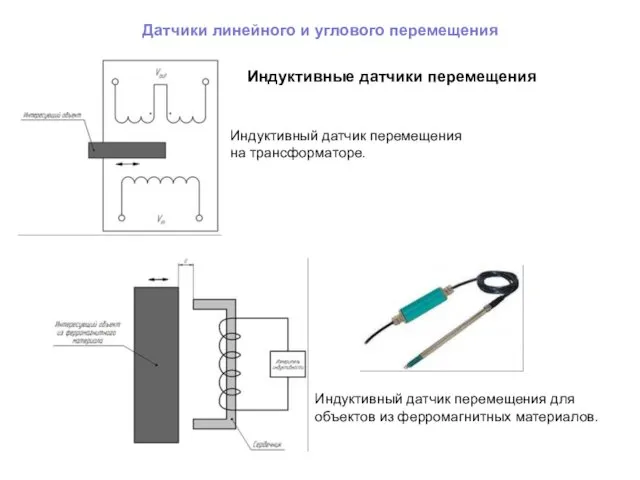
- 7. Датчики линейного и углового перемещения Индуктивный датчик перемещения на трансформаторе. Индуктивный датчик перемещения для объектов из
- 8. Датчики линейного и углового перемещения Вихретоковые датчики перемещения Датчики данного типа содержат генератор магнитного поля и
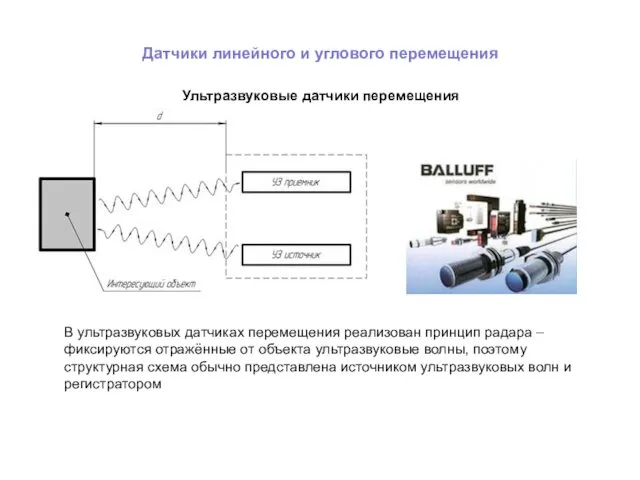
- 9. Датчики линейного и углового перемещения Ультразвуковые датчики перемещения В ультразвуковых датчиках перемещения реализован принцип радара –
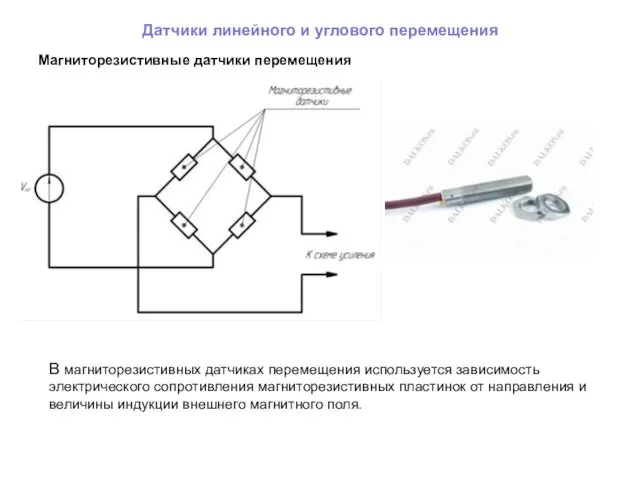
- 10. Датчики линейного и углового перемещения Магниторезистивные датчики перемещения В магниторезистивных датчиках перемещения используется зависимость электрического сопротивления
- 11. Датчики линейного и углового перемещения Датчики на основе эффекта Холла Датчики этого типа имеют конструкцию подобную
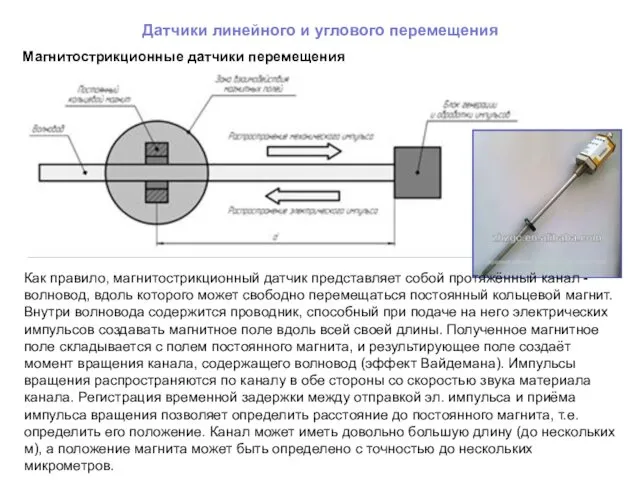
- 12. Датчики линейного и углового перемещения Магнитострикционные датчики перемещения Как правило, магнитострикционный датчик представляет собой протяжённый канал
- 13. Датчики линейного и углового перемещения Потенциометрические датчики перемещения В своей основе имеет электрический контур, содержащий потенциометр.
- 14. 3.2. Датчики усилия Тензометрический датчик силы представляет собой гибкое тело, которое под влиянием действующей силы подвергается
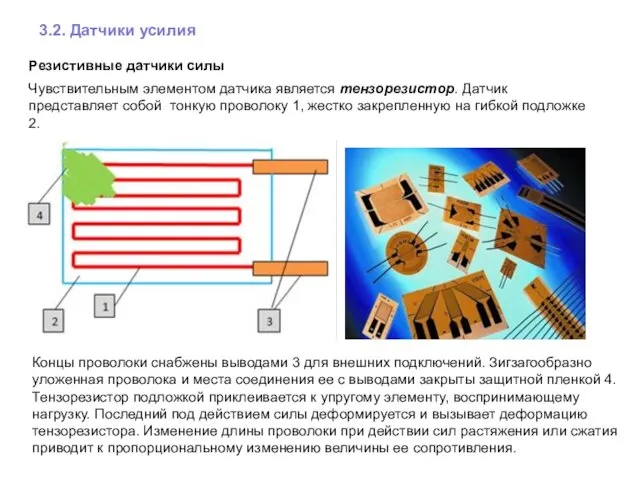
- 15. 3.2. Датчики усилия Резистивные датчики силы Чувствительным элементом датчика является тензорезистор. Датчик представляет собой тонкую проволоку
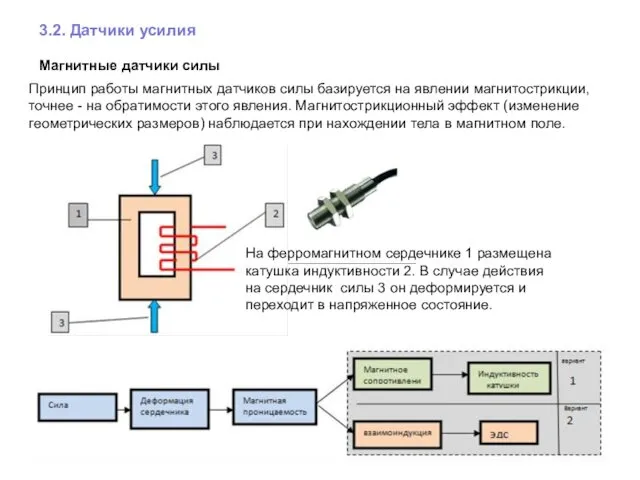
- 16. 3.2. Датчики усилия Магнитные датчики силы Принцип работы магнитных датчиков силы базируется на явлении магнитострикции, точнее
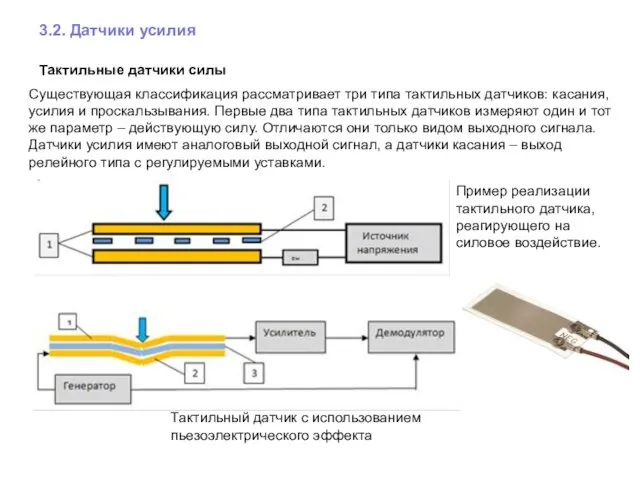
- 17. 3.2. Датчики усилия Тактильные датчики силы Существующая классификация рассматривает три типа тактильных датчиков: касания, усилия и
- 18. 3.2. Датчики усилия Пьезорезонансные датчики силы В датчиках силы этого типа используются оба эффекта, свойственные пьезокристаллическим
- 19. 3.2. Датчики усилия Емкостные датчики силы Емкостные датчики силы относятся к параметрическим. Конструктивно они представляют конденсатор,
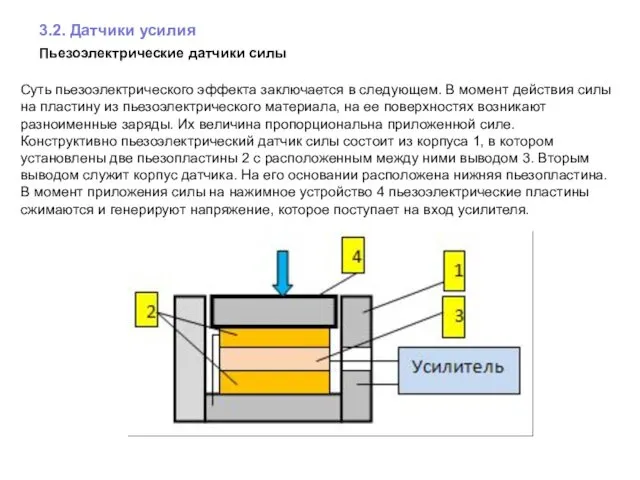
- 20. 3.2. Датчики усилия Пьезоэлектрические датчики силы Суть пьезоэлектрического эффекта заключается в следующем. В момент действия силы
- 21. 3.3. Датчики скорости вращения. Датчики скорости вращения представляют собой, так называемые, частотные датчики. Их принцип действия
- 22. 3.3. Датчики скорости вращения. Классификация датчиков скорости вращения 1.По способу воспроизведения показаний: приборы с непосредственным отсчетом
- 23. 3.3. Датчики скорости вращения. Изучим следующие группы датчиков скорости вращения: Индукционные датчики скорости Фотоэлектрические датчики скорости
- 24. 3.3. Датчики скорости вращения. 1.Индукционные датчики скорости вращения преобразуют измеряемую неэлектрическую величину в ЭДС индукции. Принцип
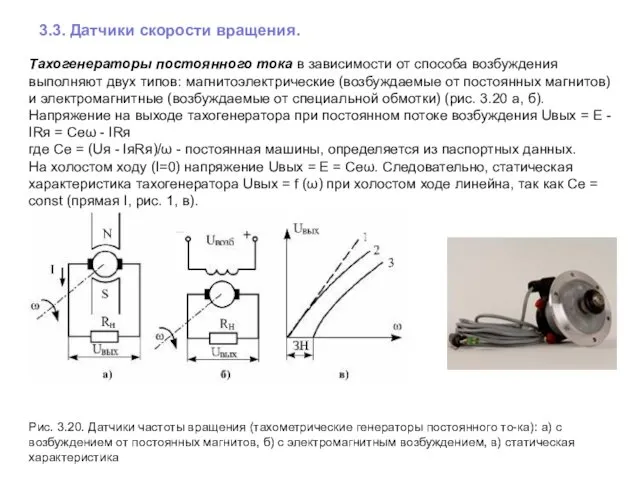
- 25. 3.3. Датчики скорости вращения. Тахогенераторы постоянного тока в зависимости от способа возбуждения выполняют двух типов: магнитоэлектрические
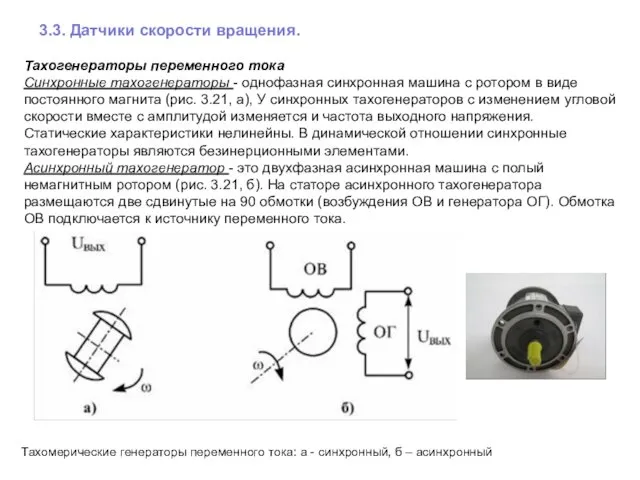
- 26. 3.3. Датчики скорости вращения. Тахогенераторы переменного тока Синхронные тахогенераторы - однофазная синхронная машина с ротором в
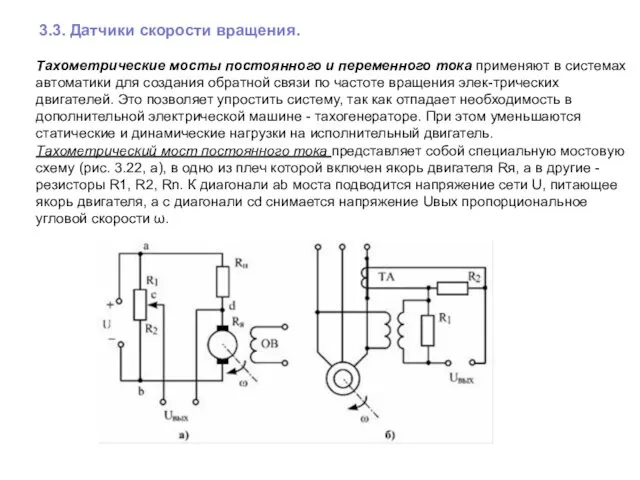
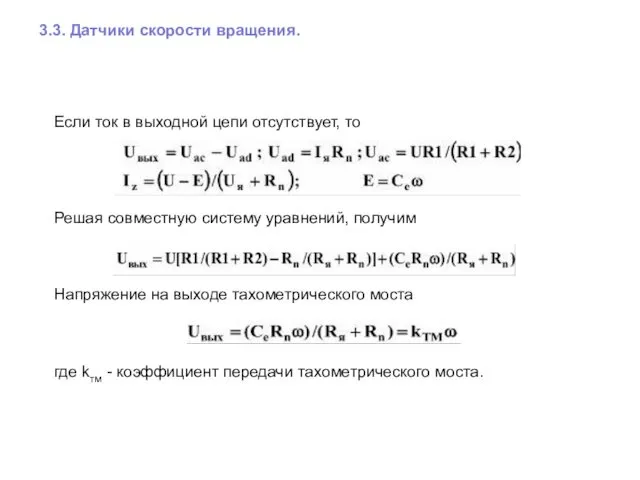
- 27. 3.3. Датчики скорости вращения. Тахометрические мосты постоянного и переменного тока применяют в системах автоматики для создания
- 28. 3.3. Датчики скорости вращения. Если ток в выходной цепи отсутствует, то Решая совместную систему уравнений, получим
- 29. 3.3. Датчики скорости вращения. Фотоэлектрические датчики скорости вращения регистрируют изменение светового потока, связанное с изменением положения
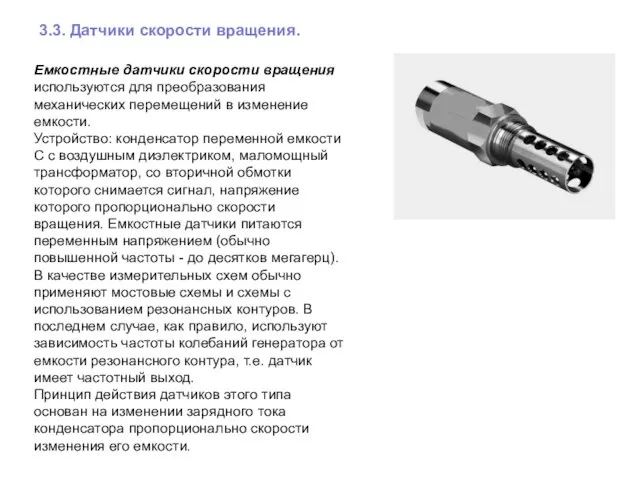
- 30. 3.3. Датчики скорости вращения. Емкостные датчики скорости вращения используются для преобразования механических перемещений в изменение емкости.
- 31. 3.3. Датчики скорости вращения. Ультразвуковые датчики скорости вращения применяются для измерения скорости вращения деталей, установленных в
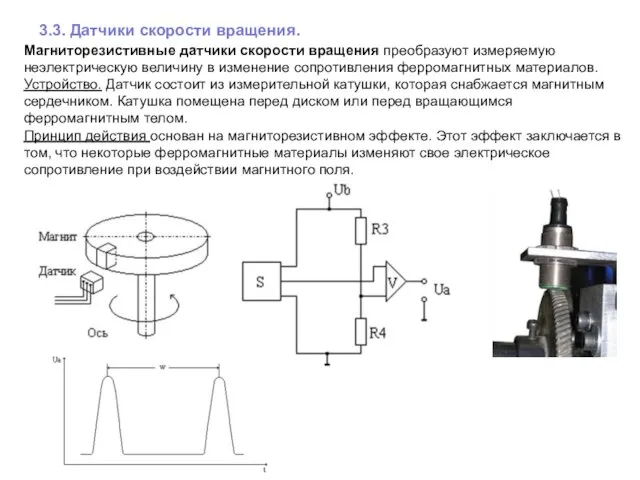
- 32. 3.3. Датчики скорости вращения. Магниторезистивные датчики скорости вращения преобразуют измеряемую неэлектрическую величину в изменение сопротивления ферромагнитных
- 34. Скачать презентацию
3.1. Датчики линейного и углового перемещения
3.2. Датчики усилия
3.3. Датчики скорости вращения.
«ЭЛЕКТРИЧЕСКИЕ
3.1. Датчики линейного и углового перемещения
3.2. Датчики усилия
3.3. Датчики скорости вращения.
«ЭЛЕКТРИЧЕСКИЕ
Датчики линейного и углового перемещения
Датчик - это устройство, преобразующее входное воздействие
Датчики линейного и углового перемещения
Датчик - это устройство, преобразующее входное воздействие

Датчики линейного и углового перемещения
Датчики линейного перемещения.
По принципу действия бывают:
• Емкостными;
• Оптическими;
• Индуктивными;
• Вихретоковыми;
• Ультразвуковыми;
• Магниторезистивными;
• Потенциометрическими;
• Магнитострикционными;
• На основе
Датчики линейного и углового перемещения
Датчики линейного перемещения.
По принципу действия бывают:
• Емкостными;
• Оптическими;
• Индуктивными;
• Вихретоковыми;
• Ультразвуковыми;
• Магниторезистивными;
• Потенциометрическими;
• Магнитострикционными;
• На основе
Датчики линейного и углового перемещения
Емкостной датчик линейного перемещения с изменяющейся величиной
Датчики линейного и углового перемещения
Емкостной датчик линейного перемещения с изменяющейся величиной
Датчики линейного и углового перемещения
Оптические датчики перемещения
Оптический датчик перемещения на основе
Датчики линейного и углового перемещения
Оптические датчики перемещения
Оптический датчик перемещения на основе
Датчики линейного и углового перемещения
Индуктивный датчик перемещения на трансформаторе.
Индуктивный датчик перемещения
Датчики линейного и углового перемещения
Индуктивный датчик перемещения на трансформаторе.
Индуктивный датчик перемещения

Датчики линейного и углового перемещения
Вихретоковые датчики перемещения
Датчики данного типа содержат генератор
Датчики линейного и углового перемещения
Вихретоковые датчики перемещения
Датчики данного типа содержат генератор
Датчики линейного и углового перемещения
Ультразвуковые датчики перемещения
В ультразвуковых датчиках перемещения реализован
Датчики линейного и углового перемещения
Ультразвуковые датчики перемещения
В ультразвуковых датчиках перемещения реализован
Датчики линейного и углового перемещения
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется
Датчики линейного и углового перемещения
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется

Датчики линейного и углового перемещения
Датчики на основе эффекта Холла
Датчики этого типа
Датчики линейного и углового перемещения
Датчики на основе эффекта Холла
Датчики этого типа
Датчики линейного и углового перемещения
Магнитострикционные датчики перемещения
Как правило, магнитострикционный датчик представляет
Датчики линейного и углового перемещения
Магнитострикционные датчики перемещения
Как правило, магнитострикционный датчик представляет

Датчики линейного и углового перемещения
Потенциометрические датчики перемещения
В своей основе имеет электрический
Датчики линейного и углового перемещения
Потенциометрические датчики перемещения
В своей основе имеет электрический
3.2. Датчики усилия
Тензометрический датчик силы представляет собой гибкое тело, которое
3.2. Датчики усилия
Тензометрический датчик силы представляет собой гибкое тело, которое
3.2. Датчики усилия
Резистивные датчики силы
Чувствительным элементом датчика является тензорезистор. Датчик
3.2. Датчики усилия
Резистивные датчики силы
Чувствительным элементом датчика является тензорезистор. Датчик
3.2. Датчики усилия
Магнитные датчики силы
Принцип работы магнитных датчиков силы базируется
3.2. Датчики усилия
Магнитные датчики силы
Принцип работы магнитных датчиков силы базируется
3.2. Датчики усилия
Тактильные датчики силы
Существующая классификация рассматривает три типа тактильных
3.2. Датчики усилия
Тактильные датчики силы
Существующая классификация рассматривает три типа тактильных

3.2. Датчики усилия
Пьезорезонансные датчики силы
В датчиках силы этого типа используются
3.2. Датчики усилия
Пьезорезонансные датчики силы
В датчиках силы этого типа используются

3.2. Датчики усилия
Емкостные датчики силы
Емкостные датчики силы относятся к параметрическим.
3.2. Датчики усилия
Емкостные датчики силы
Емкостные датчики силы относятся к параметрическим.
3.2. Датчики усилия
Пьезоэлектрические датчики силы
Суть пьезоэлектрического эффекта заключается в следующем.
3.2. Датчики усилия
Пьезоэлектрические датчики силы
Суть пьезоэлектрического эффекта заключается в следующем.
3.3. Датчики скорости вращения.
Датчики скорости вращения представляют собой, так называемые, частотные
3.3. Датчики скорости вращения.
Датчики скорости вращения представляют собой, так называемые, частотные
3.3. Датчики скорости вращения.
Классификация датчиков скорости вращения
1.По способу воспроизведения показаний: приборы
3.3. Датчики скорости вращения.
Классификация датчиков скорости вращения
1.По способу воспроизведения показаний: приборы
3.3. Датчики скорости вращения.
Изучим следующие группы датчиков скорости вращения:
Индукционные датчики скорости
3.3. Датчики скорости вращения.
Изучим следующие группы датчиков скорости вращения:
Индукционные датчики скорости
3.3. Датчики скорости вращения.
1.Индукционные датчики скорости вращения преобразуют измеряемую неэлектрическую величину
3.3. Датчики скорости вращения.
1.Индукционные датчики скорости вращения преобразуют измеряемую неэлектрическую величину
3.3. Датчики скорости вращения.
Тахогенераторы постоянного тока в зависимости от способа возбуждения
3.3. Датчики скорости вращения.
Тахогенераторы постоянного тока в зависимости от способа возбуждения
3.3. Датчики скорости вращения.
Тахогенераторы переменного тока
Синхронные тахогенераторы - однофазная синхронная машина
3.3. Датчики скорости вращения.
Тахогенераторы переменного тока
Синхронные тахогенераторы - однофазная синхронная машина
3.3. Датчики скорости вращения.
Тахометрические мосты постоянного и переменного тока применяют в
3.3. Датчики скорости вращения.
Тахометрические мосты постоянного и переменного тока применяют в
3.3. Датчики скорости вращения.
Если ток в выходной цепи отсутствует, то
Решая совместную
3.3. Датчики скорости вращения.
Если ток в выходной цепи отсутствует, то
Решая совместную

3.3. Датчики скорости вращения.
Фотоэлектрические датчики скорости вращения регистрируют изменение светового потока,
3.3. Датчики скорости вращения.
Фотоэлектрические датчики скорости вращения регистрируют изменение светового потока,
3.3. Датчики скорости вращения.
Емкостные датчики скорости вращения используются для преобразования механических
3.3. Датчики скорости вращения.
Емкостные датчики скорости вращения используются для преобразования механических

3.3. Датчики скорости вращения.
Ультразвуковые датчики скорости вращения применяются для измерения скорости
3.3. Датчики скорости вращения.
Ультразвуковые датчики скорости вращения применяются для измерения скорости
3.3. Датчики скорости вращения.
Магниторезистивные датчики скорости вращения преобразуют измеряемую неэлектрическую величину
3.3. Датчики скорости вращения.
Магниторезистивные датчики скорости вращения преобразуют измеряемую неэлектрическую величину
 Рахматулин, Клещёв, Рябенко. Технология хранения автомобилей. 19-пб-тв1
Рахматулин, Клещёв, Рябенко. Технология хранения автомобилей. 19-пб-тв1 Хронические гепатиты у детей (классификация, клиника)
Хронические гепатиты у детей (классификация, клиника) Ремонт кабинета № 13
Ремонт кабинета № 13 Alergia na jad błonkoskrzydłych
Alergia na jad błonkoskrzydłych Облачение священства
Облачение священства Наша армия
Наша армия Отражение звука
Отражение звука Аномальные маточные кровотечения
Аномальные маточные кровотечения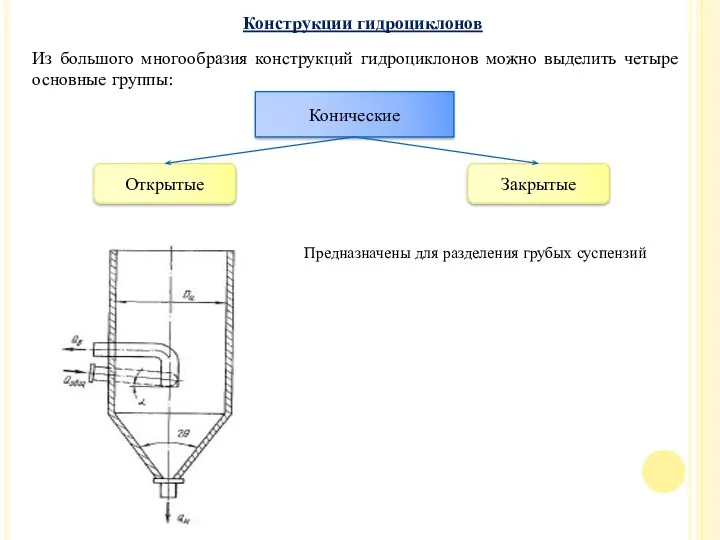 Конструкции гидроциклонов
Конструкции гидроциклонов Развитие творческих способностей детей раннего возраста в продуктивной (конструктивной) деятельности
Развитие творческих способностей детей раннего возраста в продуктивной (конструктивной) деятельности Моє рідне місто Житомир
Моє рідне місто Житомир Психологические особенности детей и подростков с конституционально - экзогенным ожирением
Психологические особенности детей и подростков с конституционально - экзогенным ожирением Презентация на урок химии в 8 классе по теме Степень окисления.
Презентация на урок химии в 8 классе по теме Степень окисления. Общественное движение в годы правления Николая I
Общественное движение в годы правления Николая I Четырехэтапная мозговая атака
Четырехэтапная мозговая атака Розіборка ноутбука DELL
Розіборка ноутбука DELL Гражданская война. Причины и основные этапы войны
Гражданская война. Причины и основные этапы войны Hangzhou dongya instrument CO, LTD
Hangzhou dongya instrument CO, LTD ВКР: Модернизация системы контроля доступа для ООО “БИГАМ-Инвест
ВКР: Модернизация системы контроля доступа для ООО “БИГАМ-Инвест Предмет политической философии. Основные вехи становления и развития политической философии. Лекция 1
Предмет политической философии. Основные вехи становления и развития политической философии. Лекция 1 Українські землі у складі Речі Посполитої
Українські землі у складі Речі Посполитої Фонд скважин при разработке месторождения
Фонд скважин при разработке месторождения Разрыв матки
Разрыв матки Требования тарифно-квалификационного справочника работ и профессий рабочих электроэнергетики
Требования тарифно-квалификационного справочника работ и профессий рабочих электроэнергетики Функции дизайна
Функции дизайна 21 сентября Рождество Пресвятой Владычицы нашей Богородицы — рождение Девы Марии
21 сентября Рождество Пресвятой Владычицы нашей Богородицы — рождение Девы Марии Анализ фирмы Zara
Анализ фирмы Zara Административное наказание
Административное наказание