- Элементы теории графов

Содержание
- 2. Содержание 1. Основные понятия теории графов 2. Степень вершины Введение 5. Ориентированные графы 6. Изоморфизм графов
- 3. ВВЕДЕНИЕ Теория графов в качестве дисциплины может рассматриваться как раздел дискретной математики, исследующий свойства конечных множеств
- 4. Основоположники Родилась теория графов в Санкт-Петербурге. Ее создателем является Л. Эйлер, который в 1736 году опубликовал
- 5. Задача о Кенигсбергских мостах. В прусском городке Кенигсберг на реке Прегель семь мостов. Можно ли найти
- 6. Модель задачи это граф, состоящий из множества вершин и ребер, соединяющих вершины. Вершины символизируют берега, реки
- 7. Кирх Гоф Кэлли Жордан В 1847 году Кирх Гоф разработал теорию деревьев для решения совместной системы
- 8. Д.Кениг Л.В.Канторович Начало бурного развития и практического применения теории графов было положено венгерским математиком Д. Кенигом,
- 9. 1. Основные понятия теории графов Число вершин графа G обозначим р, а число ребер – q
- 10. Степенью вершины называется число ребер графа, которым принадлежит эта вершина. Еще называют его валентностью и обозначают
- 11. В графе G(V,E) сумма степеней всех его вершин – число четное, равное удвоенному числу ребер графа.
- 12. Маршрутом в графе называется чередующаяся последовательность вершин и ребер, в которой любые два соседних элемента инцидентны:
- 13. Две вершины графа называются связными, если существует соединяющая их простая цепь. В противном случае две вершины
- 14. Если элементы множества Е графа G(V, E) – упорядоченные пары, то граф называется ориентированным или орграфом.
- 15. В орграфах в зависимости от сочетания степеней входа и выхода для данной вершины рассматриваются три случая:
- 16. Петлей называется ребро, у которого начальная и конечная вершины совпадают. Петля обычно считается неориентированной. Мультиграфом называется
- 17. Если ребра графа ориентированы, то их направление в изоморфных графах должно совпадать. Изоморфизм есть отношение эквивалентности,
- 19. Пример «Изоморфизма графов»
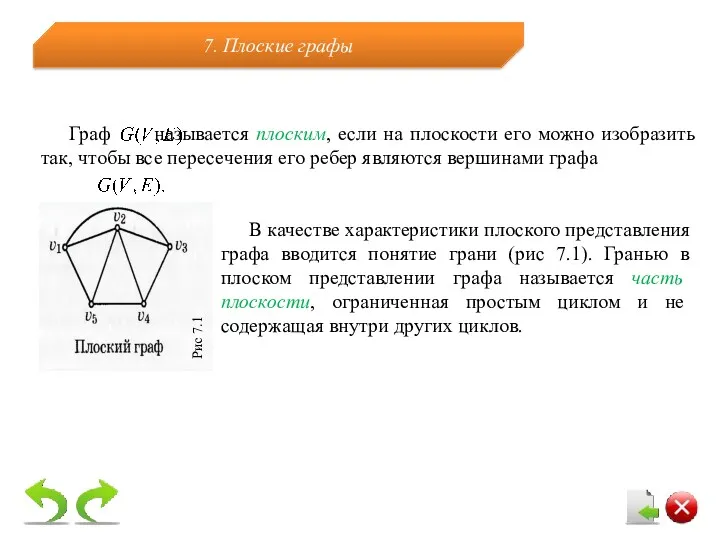
- 20. 7. Плоские графы В качестве характеристики плоского представления графа вводится понятие грани (рис 7.1). Гранью в
- 21. 8. Операции над графами
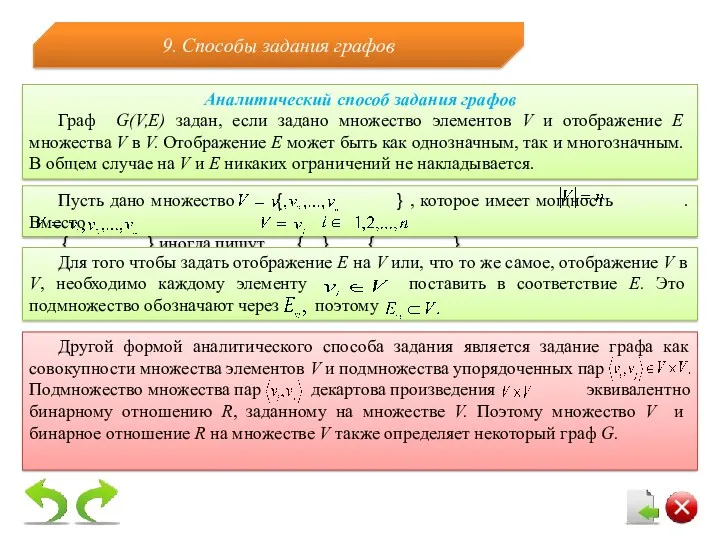
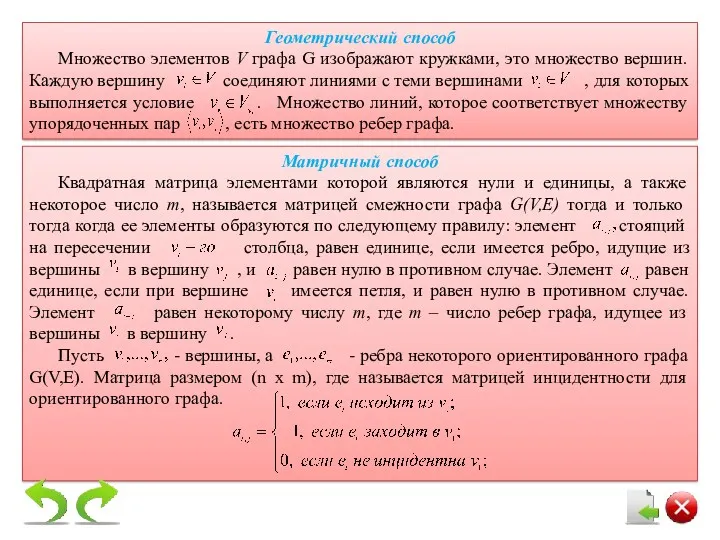
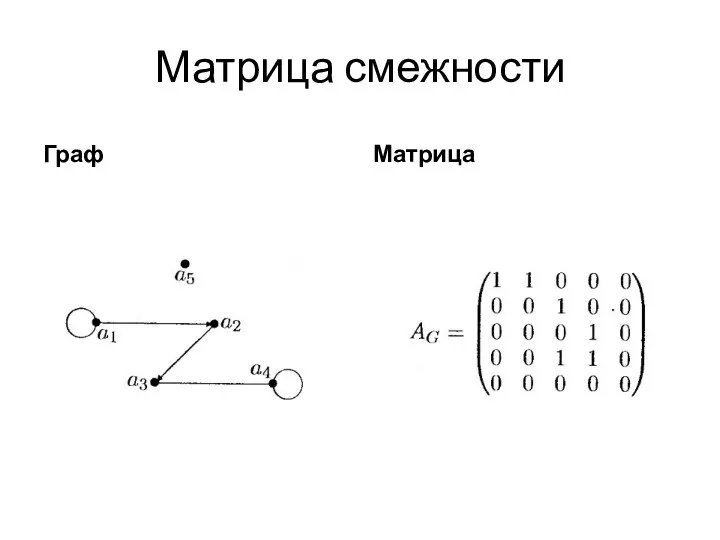
- 22. 9. Способы задания графов Аналитический способ задания графов Граф G(V,E) задан, если задано множество элементов V
- 24. Матрица смежности Граф Матрица
- 25. Матрица инцидентности
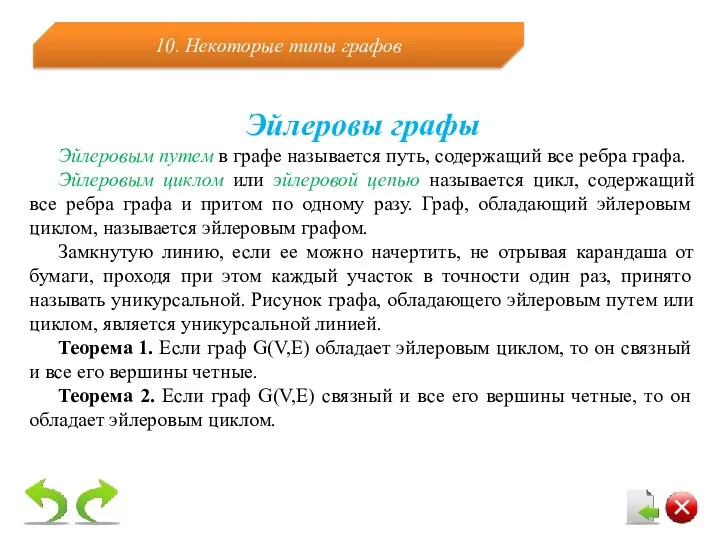
- 26. 10. Некоторые типы графов Эйлеровы графы Эйлеровым путем в графе называется путь, содержащий все ребра графа.
- 27. Примеры Граф, не являющийся эйлеровым Эйлеров граф
- 28. Гамильтоновы графы Граф, обладающий гамильтоновым циклом, называется гамильтоновым графом. Гамильтоновым циклом, называется цикл, или путь, проходящий
- 29. Достаточные условия
- 30. Достаточные условия
- 31. 11. ОПРЕДЕЛЕНИЕ ДЕРЕВА Связный неориентированный ациклический граф называется деревом. Множество деревьев называется лесом. Остовным деревом графа
- 32. ОСТОВНОЕ ДЕРЕВО Пусть теперь каждому ребру x X связного графа G=(V,X) c непустым множеством ребер Х
- 33. ОСТОВНОЕ ДЕРЕВО Алгоритм выделения МОД нагруженного связного графа G: Шаг 1. Выберем в графе G ребро
- 34. ОСТОВНОЕ ДЕРЕВО Определить МОД нагруженного графа G, изображенного на рис., используя алгоритм.
- 35. ОСТОВНОЕ ДЕРЕВО
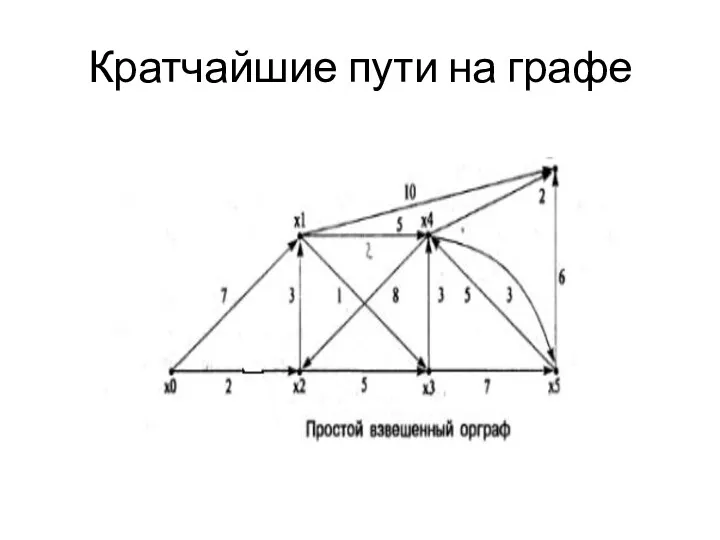
- 36. Кратчайшие пути на графе Рассматриваемый алгоритм определяет расстояния между вершинами в простом орграфе с неотрицательными весами.
- 37. Кратчайшие пути на графе Вначале вершине x0 присваивается окончательная метка 0 (нулевое расстояние до самой себя),
- 38. Кратчайшие пути на графе
- 40. Скачать презентацию
Содержание
1. Основные понятия теории графов
2. Степень вершины
Введение
5. Ориентированные графы
6. Изоморфизм графов
7.
Содержание
1. Основные понятия теории графов
2. Степень вершины
Введение
5. Ориентированные графы
6. Изоморфизм графов
7.
ВВЕДЕНИЕ
Теория графов в качестве дисциплины может рассматриваться как раздел дискретной математики,
ВВЕДЕНИЕ
Теория графов в качестве дисциплины может рассматриваться как раздел дискретной математики,
Основоположники
Родилась теория графов в Санкт-Петербурге. Ее создателем является Л. Эйлер, который
Основоположники
Родилась теория графов в Санкт-Петербурге. Ее создателем является Л. Эйлер, который

Задача о Кенигсбергских мостах.
В прусском городке Кенигсберг на реке Прегель
Задача о Кенигсбергских мостах. В прусском городке Кенигсберг на реке Прегель
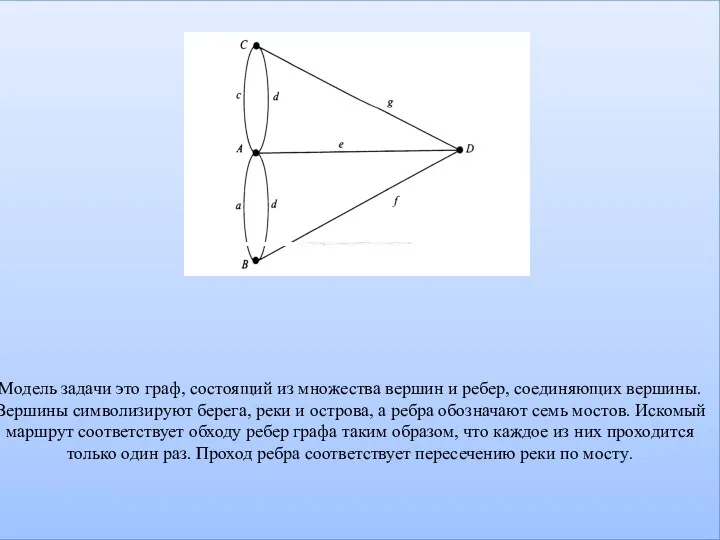
Модель задачи это граф, состоящий из множества вершин и ребер, соединяющих
Модель задачи это граф, состоящий из множества вершин и ребер, соединяющих
Кирх Гоф Кэлли Жордан
В 1847 году Кирх Гоф разработал теорию деревьев
Кирх Гоф Кэлли Жордан
В 1847 году Кирх Гоф разработал теорию деревьев
Д.Кениг Л.В.Канторович
Начало бурного развития и практического применения теории графов
Д.Кениг Л.В.Канторович
Начало бурного развития и практического применения теории графов
1. Основные понятия теории графов
Число вершин графа G обозначим р, а
1. Основные понятия теории графов
Число вершин графа G обозначим р, а
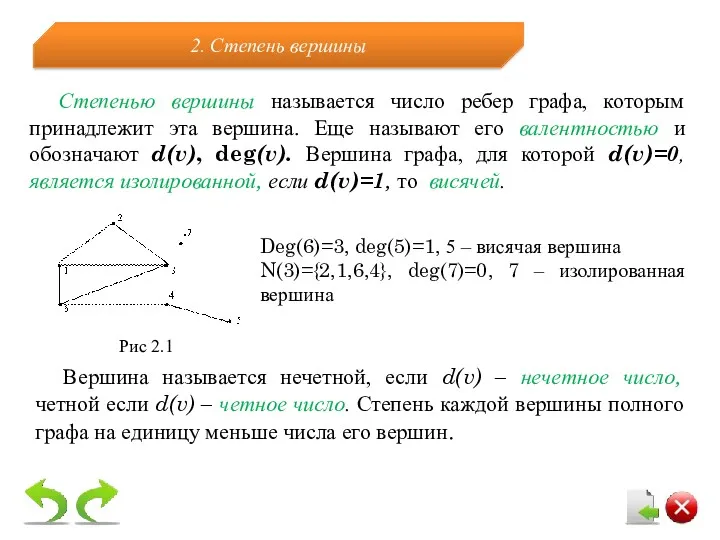
Степенью вершины называется число ребер графа, которым принадлежит эта вершина. Еще
Степенью вершины называется число ребер графа, которым принадлежит эта вершина. Еще
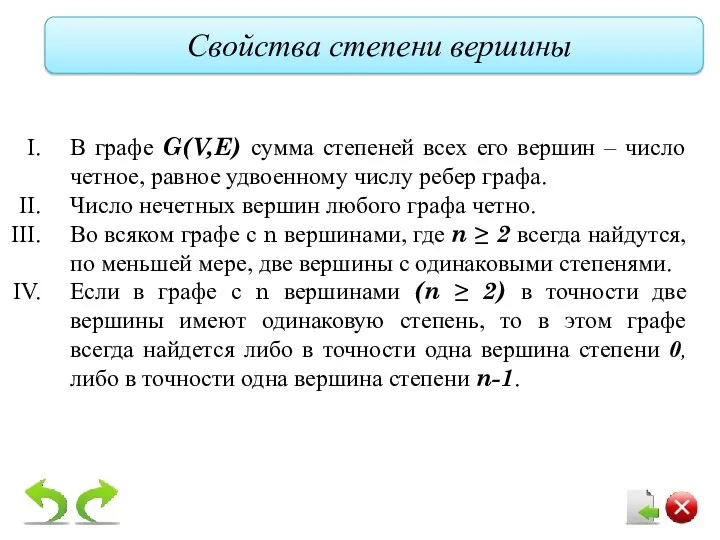
В графе G(V,E) сумма степеней всех его вершин – число четное,
В графе G(V,E) сумма степеней всех его вершин – число четное,
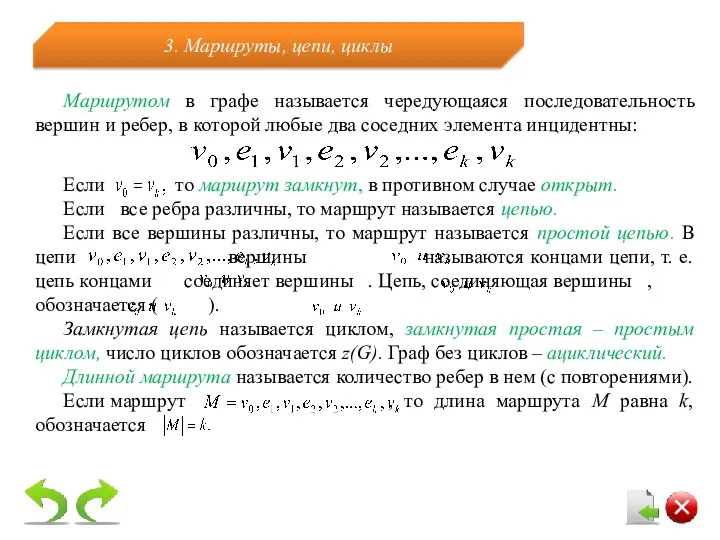
Маршрутом в графе называется чередующаяся последовательность вершин и ребер, в которой
Маршрутом в графе называется чередующаяся последовательность вершин и ребер, в которой
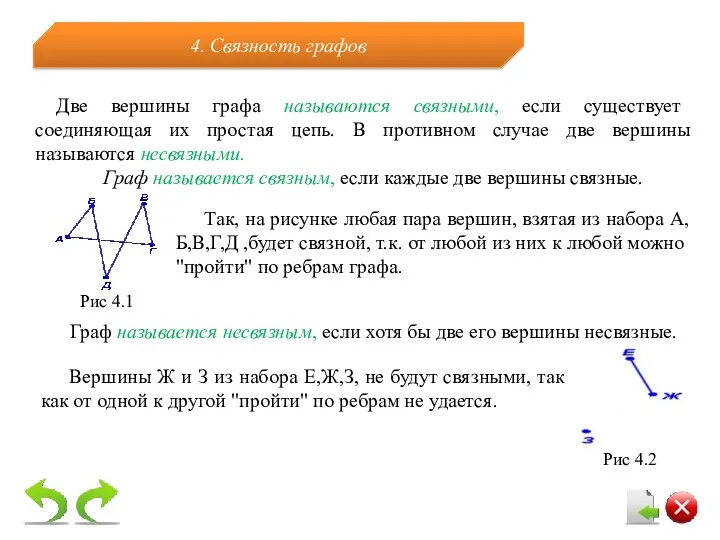
Две вершины графа называются связными, если существует соединяющая их простая цепь.
Две вершины графа называются связными, если существует соединяющая их простая цепь.
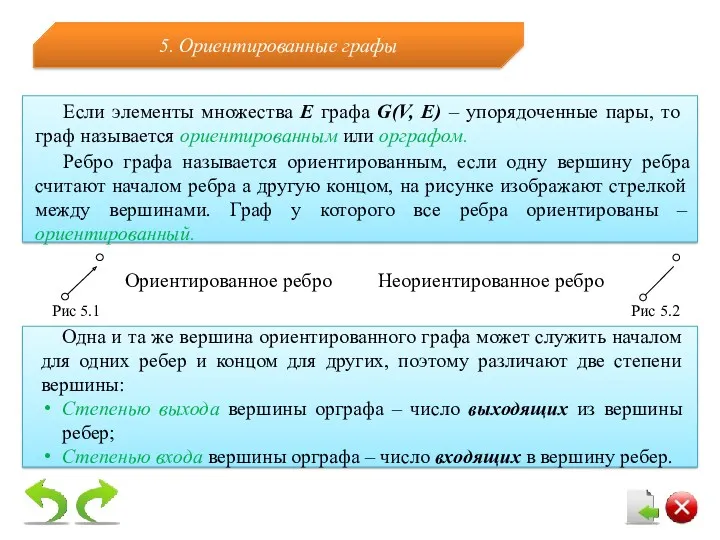
Если элементы множества Е графа G(V, E) – упорядоченные пары, то
Если элементы множества Е графа G(V, E) – упорядоченные пары, то
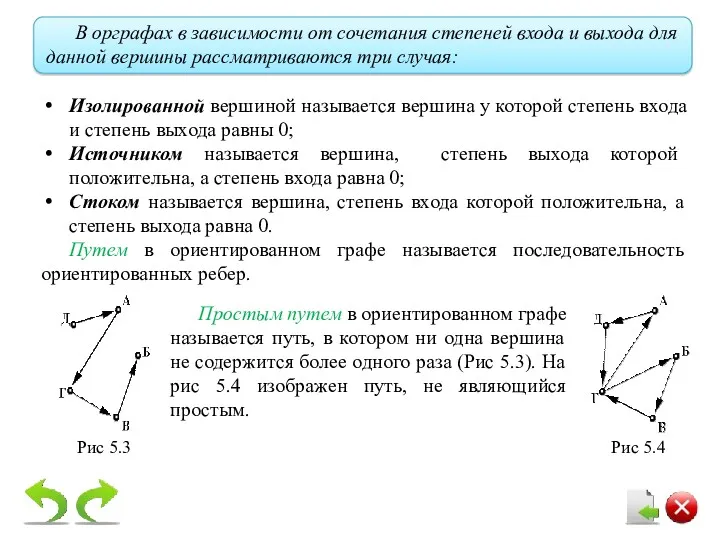
В орграфах в зависимости от сочетания степеней входа и выхода для
В орграфах в зависимости от сочетания степеней входа и выхода для
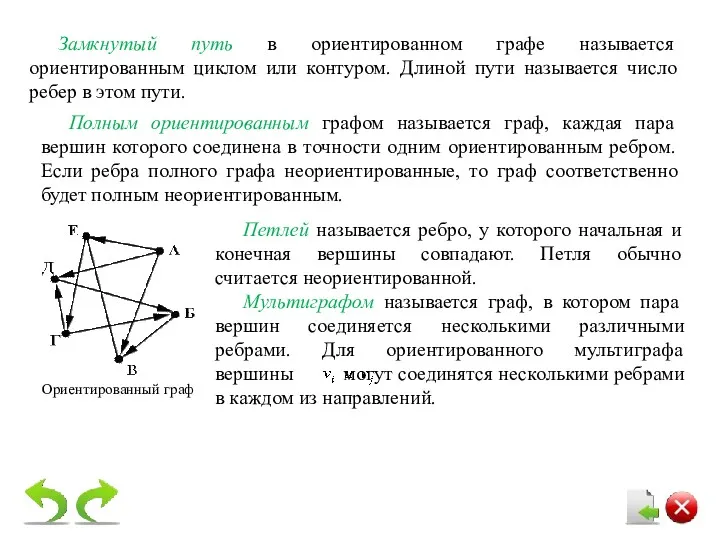
Петлей называется ребро, у которого начальная и конечная вершины совпадают. Петля
Петлей называется ребро, у которого начальная и конечная вершины совпадают. Петля
Если ребра графа ориентированы, то их направление в изоморфных графах должно
Если ребра графа ориентированы, то их направление в изоморфных графах должно
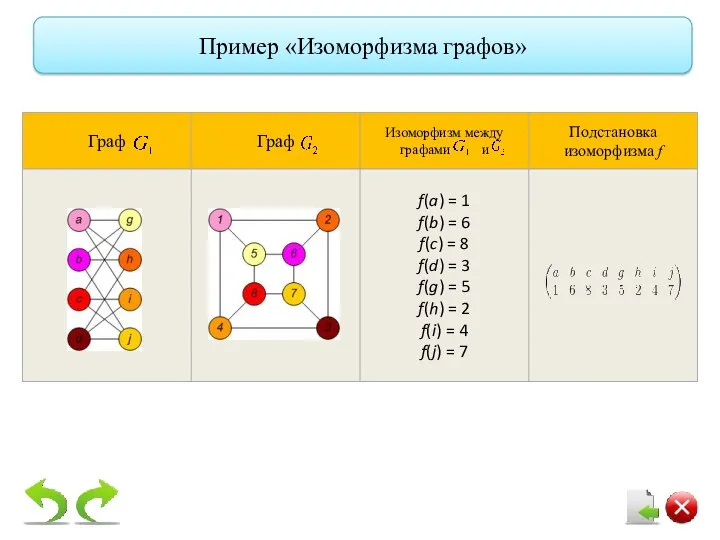
Пример «Изоморфизма графов»
Пример «Изоморфизма графов»
7. Плоские графы
В качестве характеристики плоского представления графа вводится понятие грани
7. Плоские графы
В качестве характеристики плоского представления графа вводится понятие грани
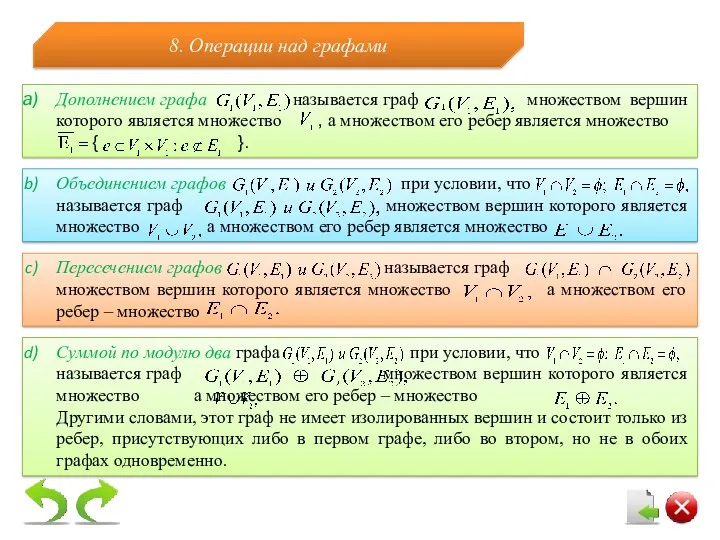
8. Операции над графами
8. Операции над графами
9. Способы задания графов
Аналитический способ задания графов
Граф G(V,E) задан, если задано
9. Способы задания графов
Аналитический способ задания графов
Граф G(V,E) задан, если задано
Матрица смежности
Граф
Матрица
Матрица смежности
Граф
Матрица
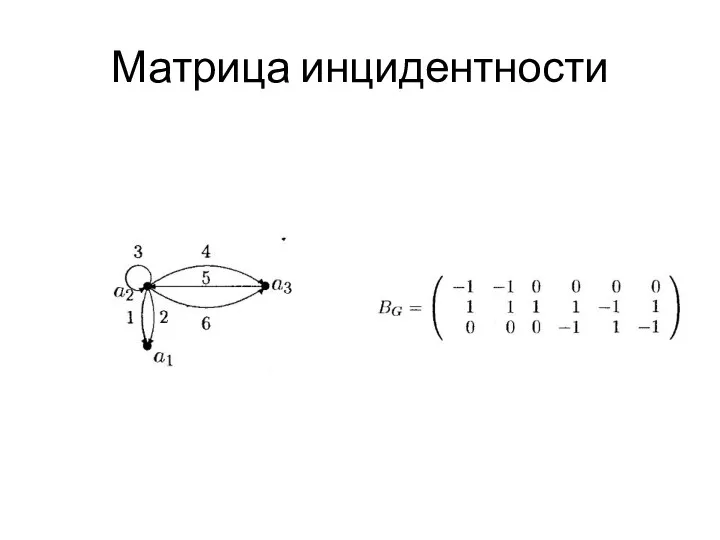
Матрица инцидентности
Матрица инцидентности
10. Некоторые типы графов
Эйлеровы графы
Эйлеровым путем в графе называется путь, содержащий
10. Некоторые типы графов
Эйлеровы графы
Эйлеровым путем в графе называется путь, содержащий
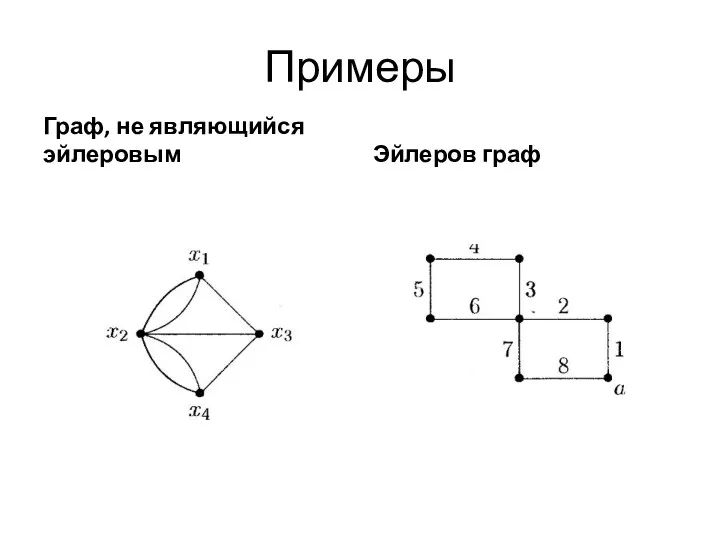
Примеры
Граф, не являющийся эйлеровым
Эйлеров граф
Примеры
Граф, не являющийся эйлеровым
Эйлеров граф
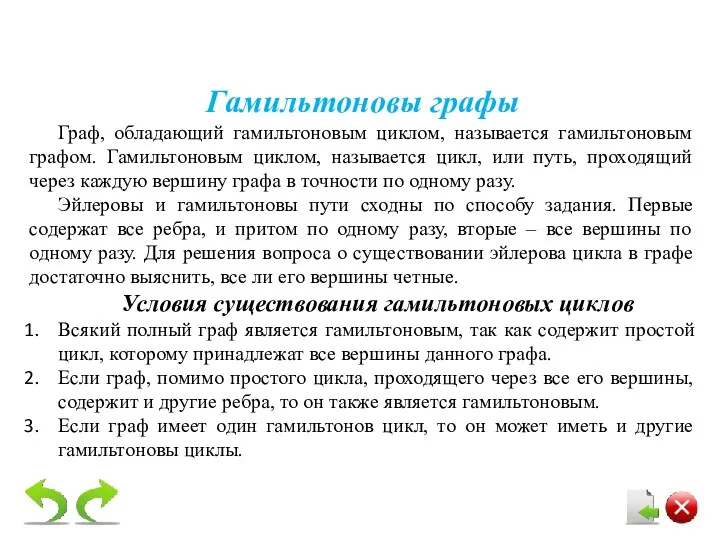
Гамильтоновы графы
Граф, обладающий гамильтоновым циклом, называется гамильтоновым графом. Гамильтоновым циклом, называется
Гамильтоновы графы
Граф, обладающий гамильтоновым циклом, называется гамильтоновым графом. Гамильтоновым циклом, называется
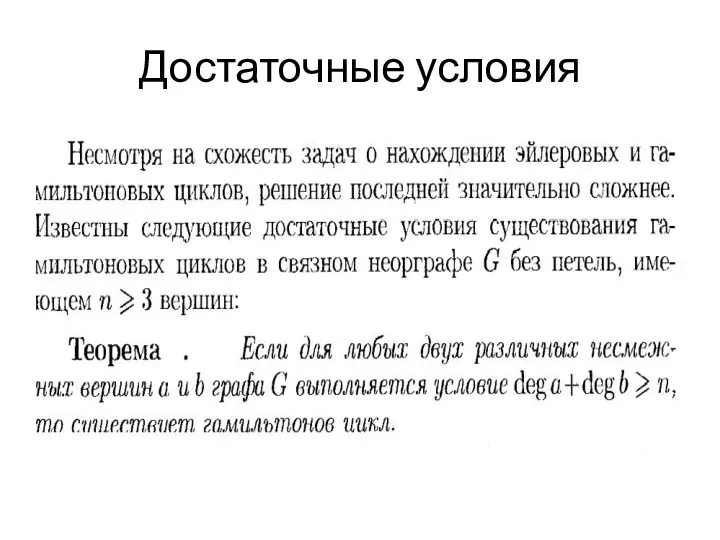
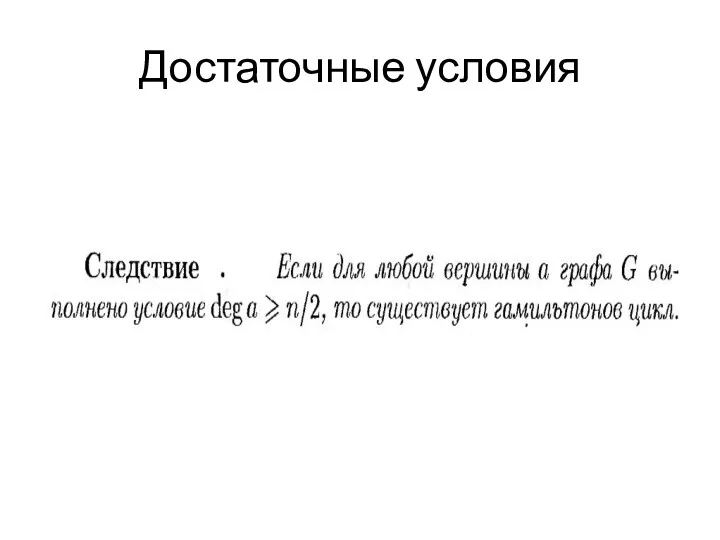
Достаточные условия
Достаточные условия
Достаточные условия
Достаточные условия
11. ОПРЕДЕЛЕНИЕ ДЕРЕВА
Связный неориентированный ациклический граф называется деревом. Множество деревьев называется
11. ОПРЕДЕЛЕНИЕ ДЕРЕВА
Связный неориентированный ациклический граф называется деревом. Множество деревьев называется
ОСТОВНОЕ ДЕРЕВО
Пусть теперь каждому ребру x X связного графа G=(V,X) c непустым множеством ребер Х поставлена
ОСТОВНОЕ ДЕРЕВО
Пусть теперь каждому ребру x X связного графа G=(V,X) c непустым множеством ребер Х поставлена
ОСТОВНОЕ ДЕРЕВО
Алгоритм выделения МОД нагруженного связного графа G:
Шаг 1. Выберем в графе G ребро минимальной
ОСТОВНОЕ ДЕРЕВО
Алгоритм выделения МОД нагруженного связного графа G:
Шаг 1. Выберем в графе G ребро минимальной
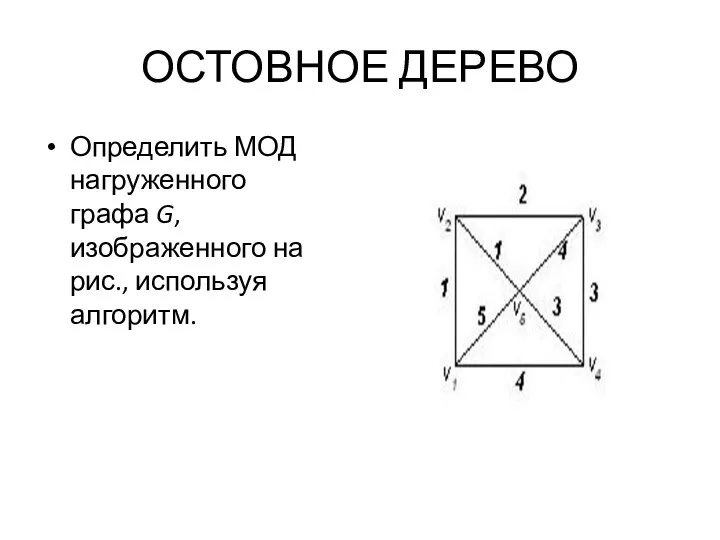
ОСТОВНОЕ ДЕРЕВО
Определить МОД нагруженного графа G, изображенного на рис., используя алгоритм.
ОСТОВНОЕ ДЕРЕВО
Определить МОД нагруженного графа G, изображенного на рис., используя алгоритм.

ОСТОВНОЕ ДЕРЕВО
ОСТОВНОЕ ДЕРЕВО
Кратчайшие пути на графе
Рассматриваемый алгоритм определяет расстояния между вершинами в простом
Кратчайшие пути на графе
Рассматриваемый алгоритм определяет расстояния между вершинами в простом
Кратчайшие пути на графе
Вначале вершине x0 присваивается окончательная метка 0 (нулевое
Кратчайшие пути на графе
Вначале вершине x0 присваивается окончательная метка 0 (нулевое
Кратчайшие пути на графе
Кратчайшие пути на графе
 Форум профессионалов молодёжной сферы #смородина
Форум профессионалов молодёжной сферы #смородина Переливание крови
Переливание крови Аргентина. Визитная карточка
Аргентина. Визитная карточка Подготовка объектов автоматизации к внедрению и опытной эксплуатации
Подготовка объектов автоматизации к внедрению и опытной эксплуатации Железобетонные бункера
Железобетонные бункера Проект Прошлое и настоящее усадьбы Ланских-Араповых
Проект Прошлое и настоящее усадьбы Ланских-Араповых Родина ретровірусів. Віруси – збудники СНІДу та онкогенних інфекцій
Родина ретровірусів. Віруси – збудники СНІДу та онкогенних інфекцій Лингвистика как наука о языке. Общее понятие о языке. Язык как знаковая система
Лингвистика как наука о языке. Общее понятие о языке. Язык как знаковая система Роль женщин в истории истории математики
Роль женщин в истории истории математики Преступления против государственной власти, интересов государственной службы и службы в органах местного самоуправления
Преступления против государственной власти, интересов государственной службы и службы в органах местного самоуправления Луна
Луна День Матери 2015 год
День Матери 2015 год Самое-самое интересное о железной дороге
Самое-самое интересное о железной дороге Пропорции головы человека (ИЗО)
Пропорции головы человека (ИЗО) Общая характеристика грибов
Общая характеристика грибов Выявление особенностей связного повествовательного высказывания у старших дошкольников с интеллектуальными нарушениями
Выявление особенностей связного повествовательного высказывания у старших дошкольников с интеллектуальными нарушениями Семейный праздник 23 + 8 (2 класс)
Семейный праздник 23 + 8 (2 класс) Этапы развития искусства Ренессанса
Этапы развития искусства Ренессанса Конфуцианство. Жизнь Конфуция и его учения
Конфуцианство. Жизнь Конфуция и его учения Детям о космосе
Детям о космосе Программная инженерия. Тестирование
Программная инженерия. Тестирование Игра Третий лишний
Игра Третий лишний Векторы на плоскости
Векторы на плоскости ЛРС седативного действия
ЛРС седативного действия Части речи. Существительное
Части речи. Существительное Автоматизация процесса извлечения метаданных из слабоструктурированных документов
Автоматизация процесса извлечения метаданных из слабоструктурированных документов Социальная политика государства
Социальная политика государства моя визитка
моя визитка