- Физиологические механизмы развития гибкости и ловкости

Содержание
- 2. Вопросы Гибкость и её виды. Факторы, влияющие на проявление гибкости. Структура ловкости. Факторы, влияющие на проявление
- 3. Гибкость – способность выполнять движения в суставах с максимальной амплитудой.
- 4. Рисунок 1 – Виды гибкости
- 6. Форма суставных поверхностей – конгруэнтность суставных поверхностей или инконгруэнтность (открытый сустав способствует гибкости, закрытый – нет).
- 7. Способы повышения растяжимости антагонистов Разминка, при которой мышцы согреваются, что снижает их вязкость и увеличивает эластичность;
- 8. Ловкость – сложный комплекс способностей, обеспечивающих совершенство управления движениями и их координацию.
- 9. Структура ловкости Способность тонко управлять пространственными, временными и силовыми параметрами движения (сенсорные системы, ЦНС, нервно-мышечный аппарат).
- 10. Роль сенсорных систем в управлении различными параметрами движения Двигательная СС обеспечивает мышечную чувствительность за счёт работы
- 11. Тип ВНД Холерики – быстро овладевают новыми движениями, эффективно перестраивают движения, только если нет сильного эмоционального
- 13. Скачать презентацию
Вопросы
Гибкость и её виды.
Факторы, влияющие на проявление гибкости.
Структура ловкости. Факторы, влияющие
Вопросы
Гибкость и её виды.
Факторы, влияющие на проявление гибкости.
Структура ловкости. Факторы, влияющие
Гибкость – способность выполнять движения в суставах с максимальной амплитудой.
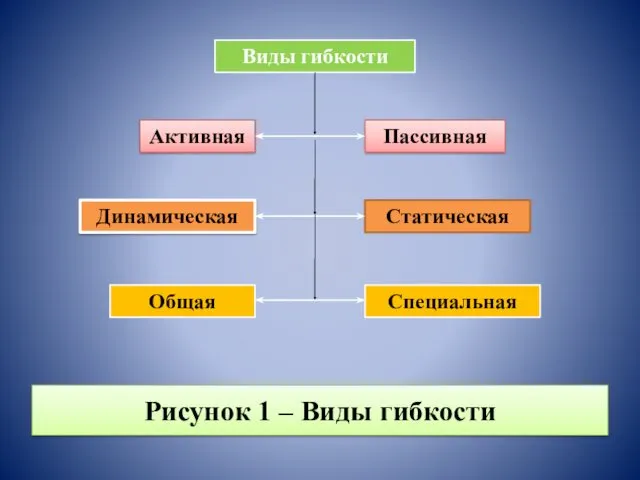
Рисунок 1 – Виды гибкости
Рисунок 1 – Виды гибкости

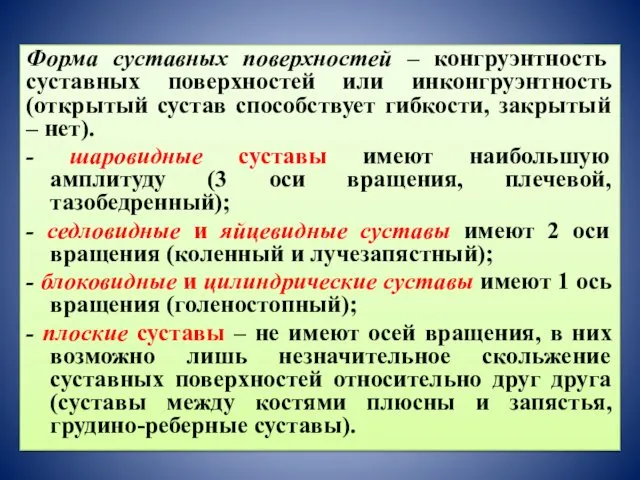
Форма суставных поверхностей – конгруэнтность суставных поверхностей или инконгруэнтность (открытый сустав
Форма суставных поверхностей – конгруэнтность суставных поверхностей или инконгруэнтность (открытый сустав
Способы повышения
растяжимости антагонистов
Разминка, при которой мышцы согреваются, что снижает их
Способы повышения
растяжимости антагонистов
Разминка, при которой мышцы согреваются, что снижает их
Ловкость – сложный комплекс способностей, обеспечивающих совершенство управления движениями и их
Структура ловкости
Способность тонко управлять пространственными, временными и силовыми параметрами движения (сенсорные
Структура ловкости
Способность тонко управлять пространственными, временными и силовыми параметрами движения (сенсорные
Роль сенсорных систем в управлении различными параметрами движения
Двигательная СС обеспечивает мышечную
Роль сенсорных систем в управлении различными параметрами движения
Двигательная СС обеспечивает мышечную
Тип ВНД
Холерики – быстро овладевают новыми движениями, эффективно перестраивают движения,
Тип ВНД
Холерики – быстро овладевают новыми движениями, эффективно перестраивают движения,
 Разработка автомобильных чехлов с нагревательным элементом
Разработка автомобильных чехлов с нагревательным элементом Мотивация персонала
Мотивация персонала Методы теоретического исследования. Классификация методов теоретического исследования
Методы теоретического исследования. Классификация методов теоретического исследования Виды туризма
Виды туризма Компетентностно-ориентированные задания
Компетентностно-ориентированные задания Презентация к уроку технологии в 1 классе по ФГОС. УМК Гармония Тема: Работаем с яичной скорлупкой
Презентация к уроку технологии в 1 классе по ФГОС. УМК Гармония Тема: Работаем с яичной скорлупкой Складові інформаційної технології
Складові інформаційної технології Производственные объекты
Производственные объекты Новогодний утренник Новогоднее волшебство
Новогодний утренник Новогоднее волшебство Виды торговых помещений
Виды торговых помещений Методы педагогического исследования. Работа с литературой
Методы педагогического исследования. Работа с литературой Почему Oriflame? Выбор сетевой компании
Почему Oriflame? Выбор сетевой компании Ата-аналарга киңәшләр
Ата-аналарга киңәшләр Пущин Иван Иванович
Пущин Иван Иванович Глобальные проблемы человечества и пути их решения. Экологическая проблема
Глобальные проблемы человечества и пути их решения. Экологическая проблема Әниләр бәйрәме
Әниләр бәйрәме Вторичные энергетические ресурсы
Вторичные энергетические ресурсы Термическая обработка ТБО
Термическая обработка ТБО Экосистема. Виды взаимодействия
Экосистема. Виды взаимодействия Обеспечение безопасности при использовании и содержании внутридомового и внутриквартирного газового оборудования
Обеспечение безопасности при использовании и содержании внутридомового и внутриквартирного газового оборудования Слово “and”
Слово “and” Концептуальные основы радиационной безопасности
Концептуальные основы радиационной безопасности Подростковый возраст
Подростковый возраст Автоматические телефонные станции. Классификация АТС
Автоматические телефонные станции. Классификация АТС Оригами-танграм
Оригами-танграм Циркуляционная система буровой установки
Циркуляционная система буровой установки Сүйек қосылыстары
Сүйек қосылыстары Сattle breeding in the US
Сattle breeding in the US