- Гидравлические системы открытого контура с закрытым центром и управлением по нагрузке

Содержание
- 2. Определение: В системах с управлением по нагрузке (LS) насос подает в систему ровно столько масла (поток
- 3. Позволяют оператору производить движения очень точно и безопасно, (с точки зрения техники безопасности и возможных инциденов)
- 4. Почему выгодно использовать LS? Пример 1 У насоса нет регулировки по объему и давлению Неиспользуемый поток
- 5. Пример 2 Насос переменного объема с регулировкой по давлению Неиспользуемое давление = потери энергии Почему выгодно
- 6. Пример 3 Насос переменной производительности с управлением LS Потери только от Δp, разницей между давлением насоса
- 7. SUMMARY: Потери энергии на разных режимах в разных системах
- 8. LS и несколько исполнительных органов
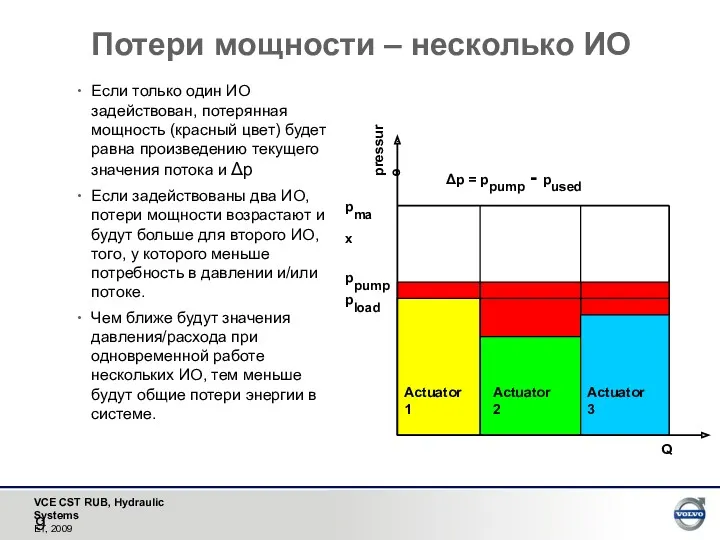
- 9. Потери мощности – несколько ИО Если только один ИО задействован, потерянная мощность (красный цвет) будет равна
- 10. Как это работает?
- 11. 1. Ситуация “Stand-By” давление ожидания
- 12. 2. Рабочий ход
- 13. 3. Достигнуто Макс давление в системе
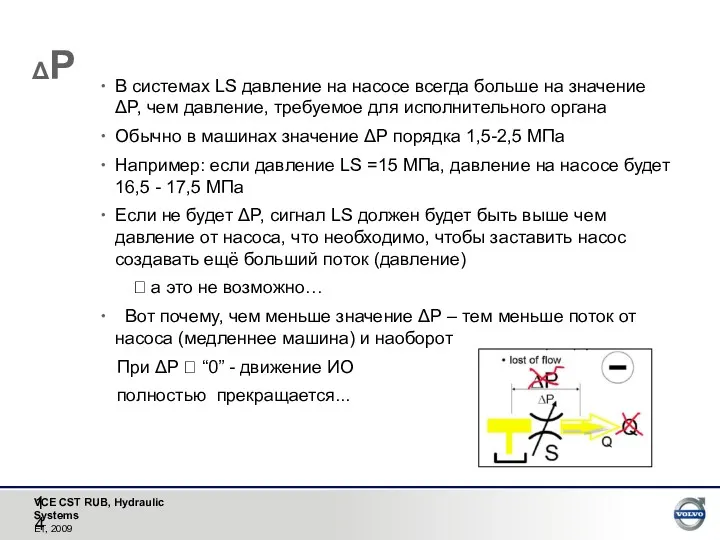
- 14. ΔP В системах LS давление на насосе всегда больше на значение ΔP, чем давление, требуемое для
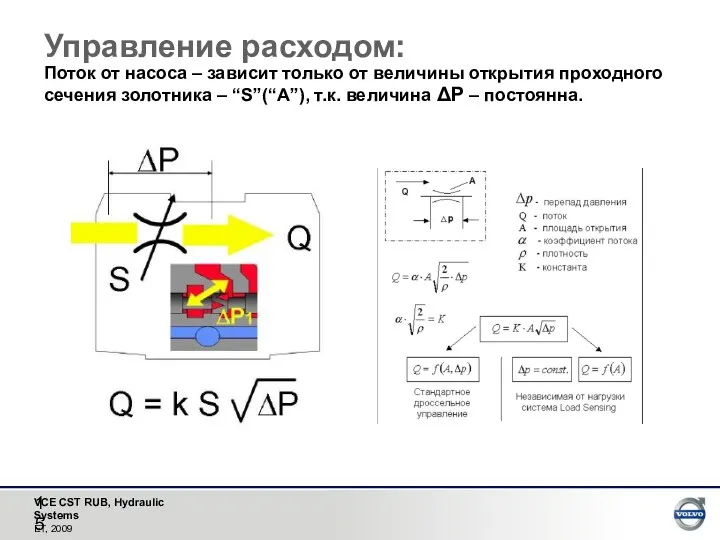
- 15. Управление расходом: Поток от насоса – зависит только от величины открытия проходного сечения золотника – “S”(“A”),
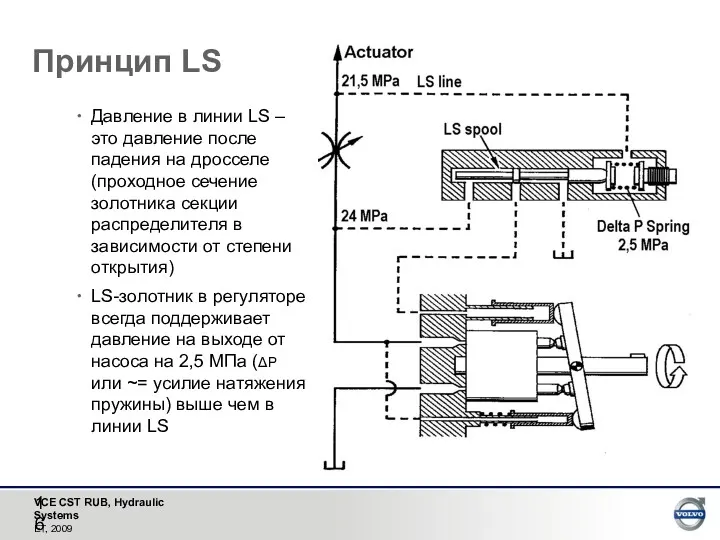
- 16. Принцип LS Давление в линии LS – это давление после падения на дросселе (проходное сечение золотника
- 17. Ограничение MAX давления – 1 (LS) Ограничивает давление, непосредственно воздействуя давлением из линии нагнетания насоса на
- 18. Ограничение MAX давления -2 (LUDV) Ограничивает давление в линии LS При максимальном давлении насоса 28 MПa,
- 19. Различают 5 основных видов LS систем: LS “без компенсаторов” в секциях распределителя. Пример: погрузчики LS “с
- 20. LS “с компенсаторами ПОСЛЕ золотника” для каждой подключенной секции распределителя. Данный вид систем имеет практическое преимущество
- 21. LS с синхронизированными электронно-управляемыми системами регулирования объёма насоса и привода золотников для быстроты реакции и уменьшения
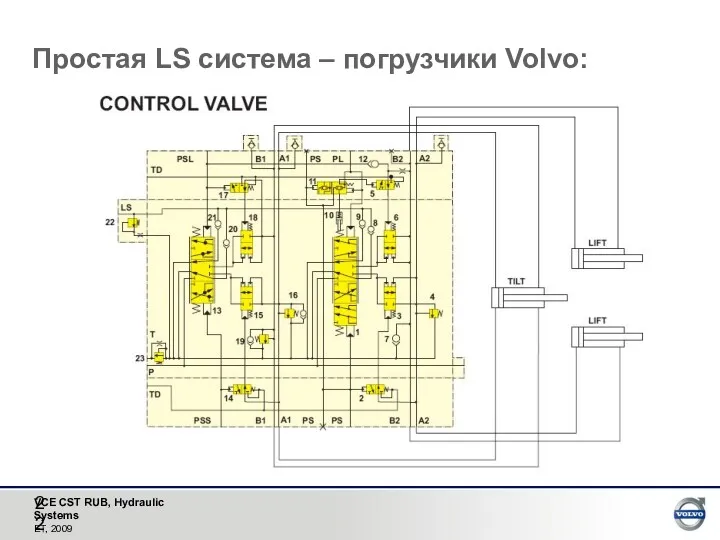
- 22. Простая LS система – погрузчики Volvo:
- 23. Простая LS система (погрузчик): - неконтролируемая неравномерность движения при одновременном движении двух ИО с различной нагрузкой
- 24. ”Hi-End” LS – системы ЗАЧЕМ НУЖНЫ КОМПЕНСАТОРЫ ДАВЛЕНИЯ?
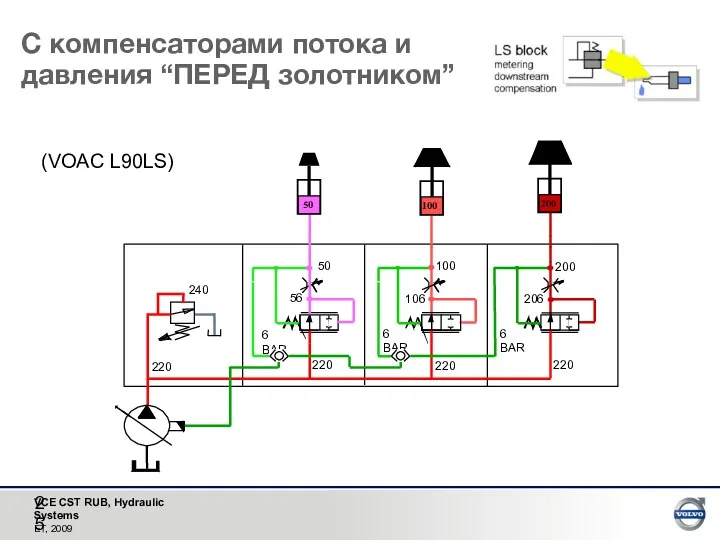
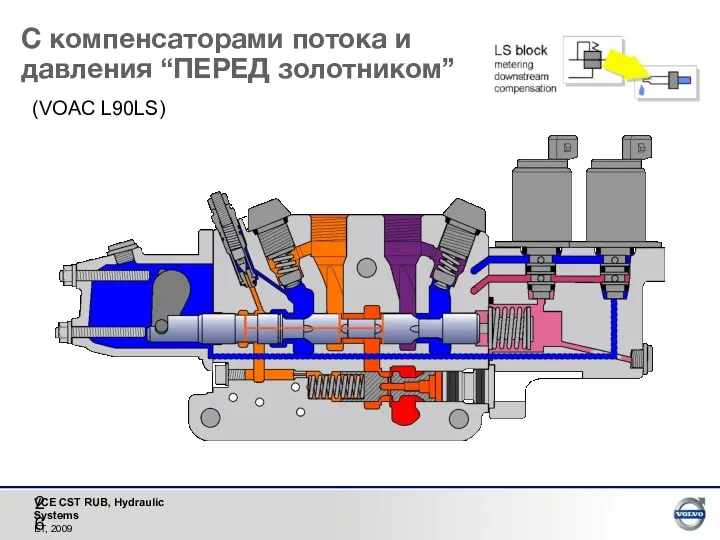
- 25. (VOAC L90LS) С компенсаторами потока и давления “ПЕРЕД золотником”
- 26. (VOAC L90LS) С компенсаторами потока и давления “ПЕРЕД золотником”
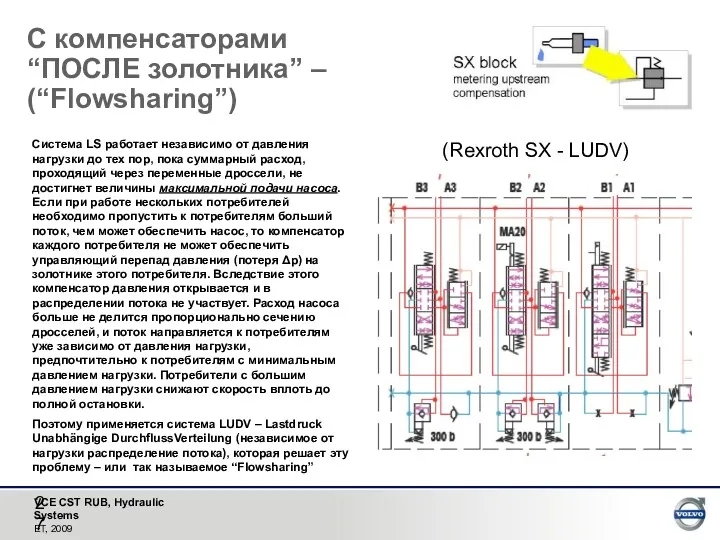
- 27. (Rexroth SX - LUDV) С компенсаторами “ПОСЛЕ золотника” – (“Flowsharing”) Система LS работает независимо от давления
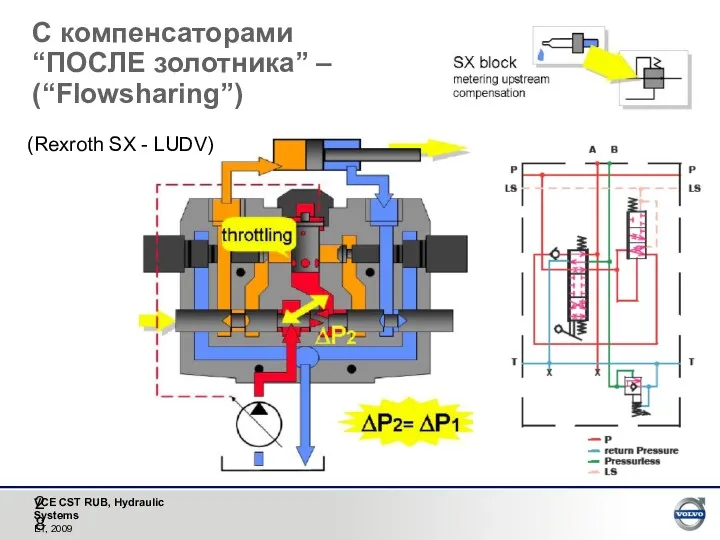
- 28. С компенсаторами “ПОСЛЕ золотника” – (“Flowsharing”) (Rexroth SX - LUDV)
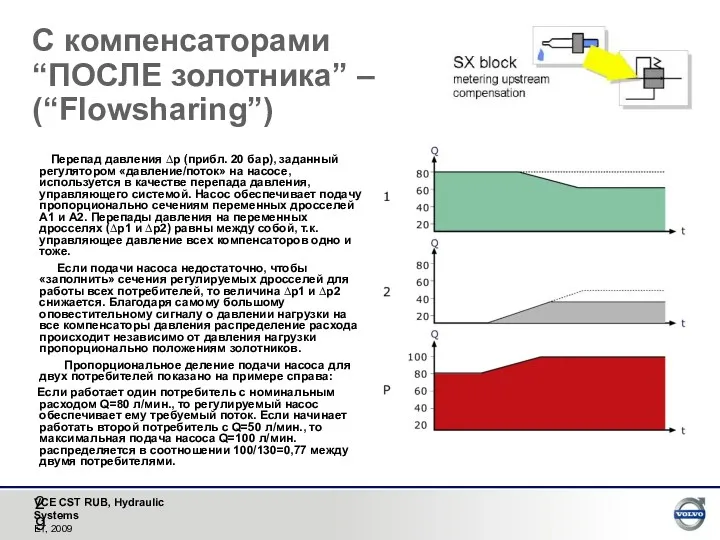
- 29. Перепад давления ∆р (прибл. 20 бар), заданный регулятором «давление/поток» на насосе, используется в качестве перепада давления,
- 30. Ограничение МАКС давления в SX- на линии LS! - нельзя использовать компенсатор на насосе (золотник ”DR”)
- 31. Основные отличия SX от обычных LS
- 32. LSC - Linde Synchron Control (разновидность, где: технически компенсатор “ПЕРЕД”, но работает как “ПОСЛЕ” золотника)
- 33. Linde Synchron Control
- 34. Linde Synchron Control
- 35. ВАРИАНТЫ ОГРАНИЧЕНИЯ МОЩНОСТИ РАБОЧЕГО НАСОСА В СИСТЕМАХ С УПРАВЛЕНИЕМ ПО НАГРУЗКЕ И ТИПЫ РЕГУЛЯТОРОВ
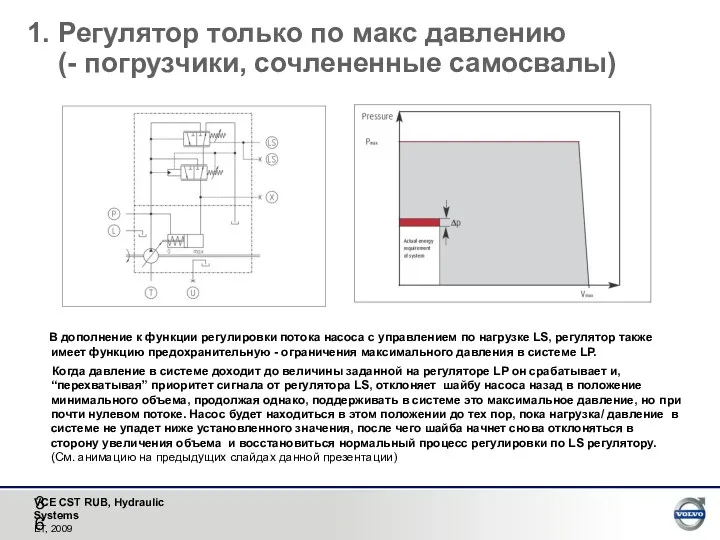
- 36. 1. Регулятор только по макс давлению (- погрузчики, сочлененные самосвалы) В дополнение к функции регулировки потока
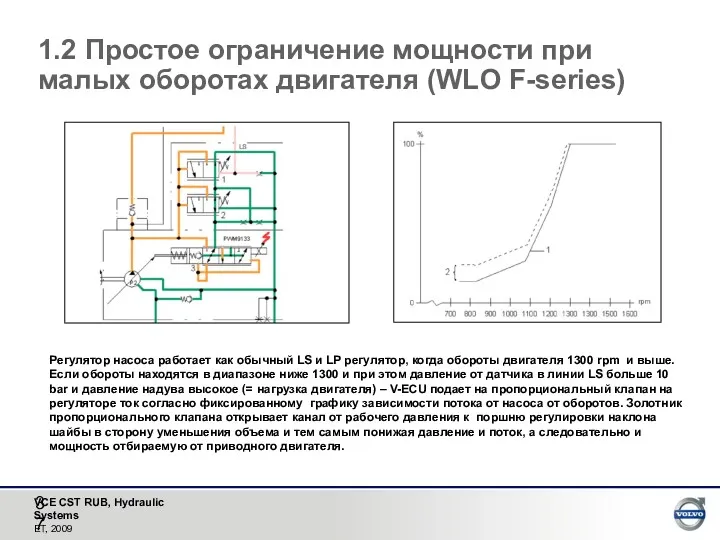
- 37. 1.2 Простое ограничение мощности при малых оборотах двигателя (WLO F-series) Регулятор насоса работает как обычный LS
- 38. 2. Регулятор мощности с характеристикой приближенной к гиперболе (- BL71, Compact EC) В дополнение к функции
- 39. Rexroth A10VSO – LR регулятор (- BL71, Compact EC) Druckwaage Leistungsventil B
- 40. Регулятор мощности насоса A 10 V(S)O DFLR 50 100 150 200 250 280 0 40 60
- 41. 3. Регулятор с идеальной гиперболической характеристикой (- не используется в VCE) Управление насосом с ограничением мощности
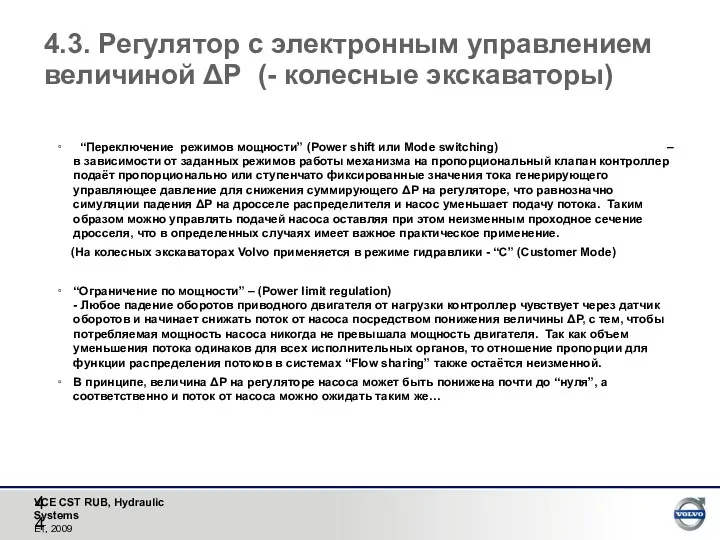
- 42. 4.1. Регулятор с электронным управлением величиной ΔР (- колесные экскаваторы) В дополнение к функции регулировки потока
- 43. Данный метод управления производительностью насоса основывается на том факте, что: равно как при постоянном значении ΔР
- 44. “Переключение режимов мощности” (Power shift или Mode switching) – в зависимости от заданных режимов работы механизма
- 46. Скачать презентацию

Определение:
В системах с управлением по нагрузке (LS) насос подает в систему
Определение:
В системах с управлением по нагрузке (LS) насос подает в систему
Позволяют оператору производить движения очень точно и безопасно, (с точки зрения
Позволяют оператору производить движения очень точно и безопасно, (с точки зрения
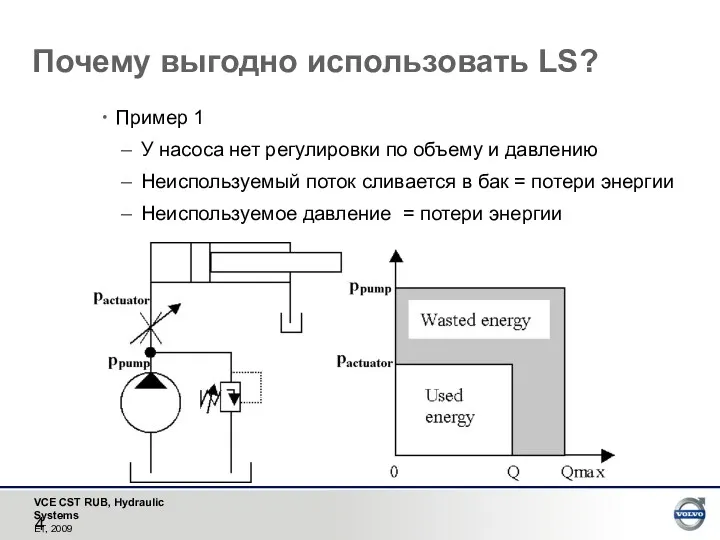
Почему выгодно использовать LS?
Пример 1
У насоса нет регулировки по объему и
Почему выгодно использовать LS?
Пример 1
У насоса нет регулировки по объему и
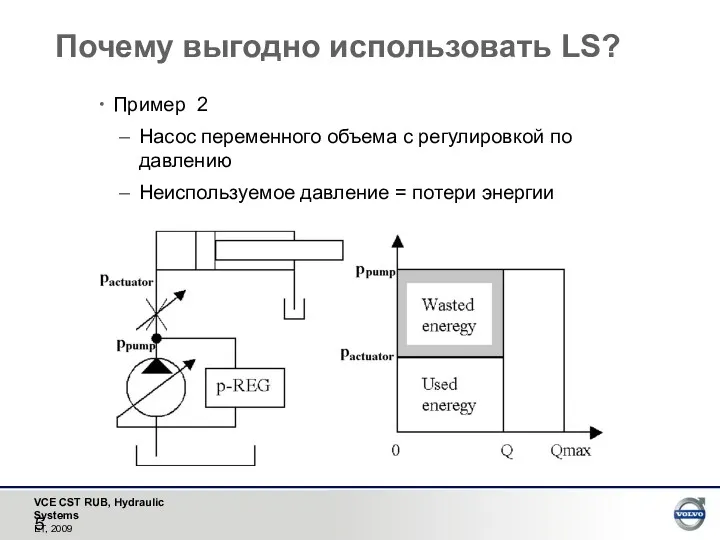
Пример 2
Насос переменного объема с регулировкой по давлению
Неиспользуемое давление = потери
Пример 2
Насос переменного объема с регулировкой по давлению
Неиспользуемое давление = потери
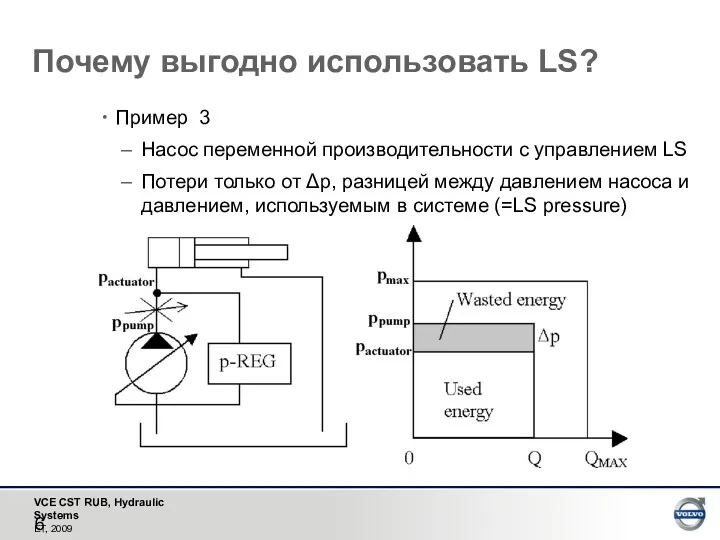
Пример 3
Насос переменной производительности с управлением LS
Потери только от Δp,
Пример 3
Насос переменной производительности с управлением LS
Потери только от Δp,

SUMMARY: Потери энергии на разных режимах в разных системах
SUMMARY: Потери энергии на разных режимах в разных системах
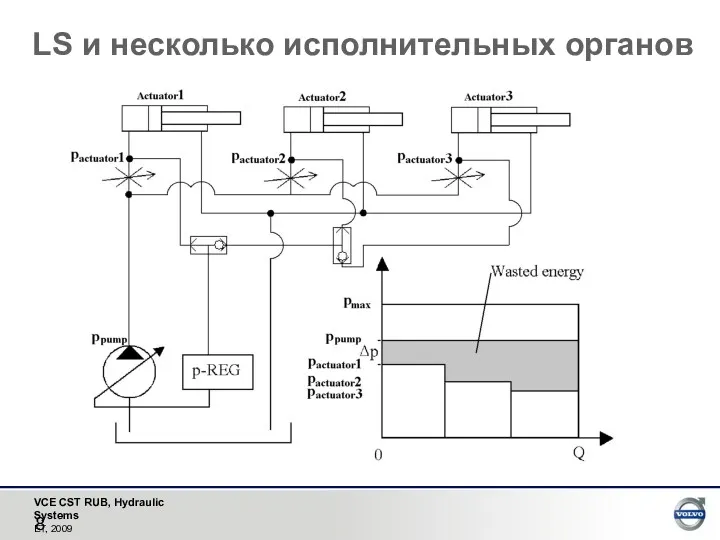
LS и несколько исполнительных органов
LS и несколько исполнительных органов
Потери мощности – несколько ИО
Если только один ИО задействован, потерянная
Потери мощности – несколько ИО
Если только один ИО задействован, потерянная

Как это работает?
Как это работает?
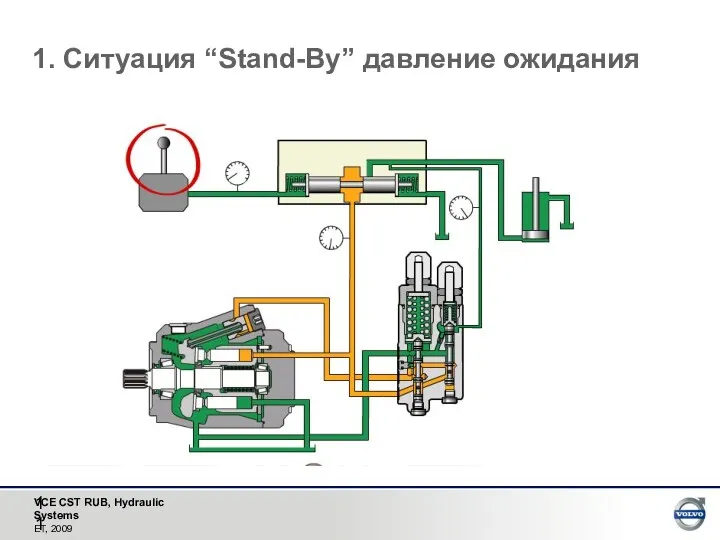
1. Ситуация “Stand-By” давление ожидания
1. Ситуация “Stand-By” давление ожидания
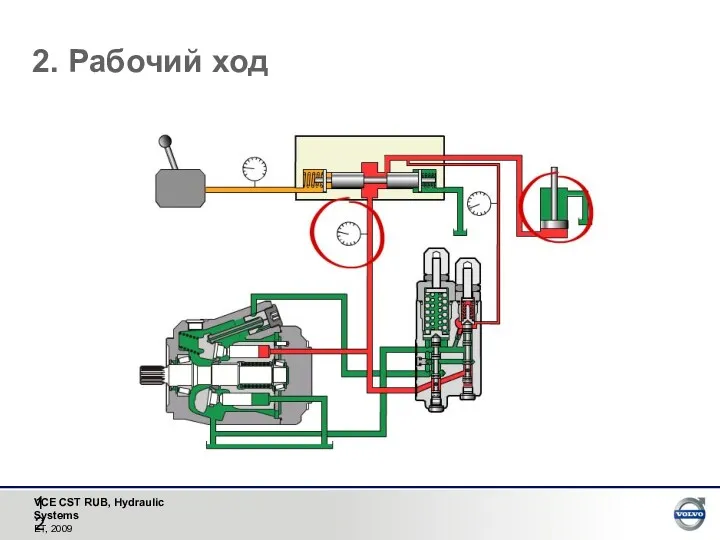
2. Рабочий ход
2. Рабочий ход
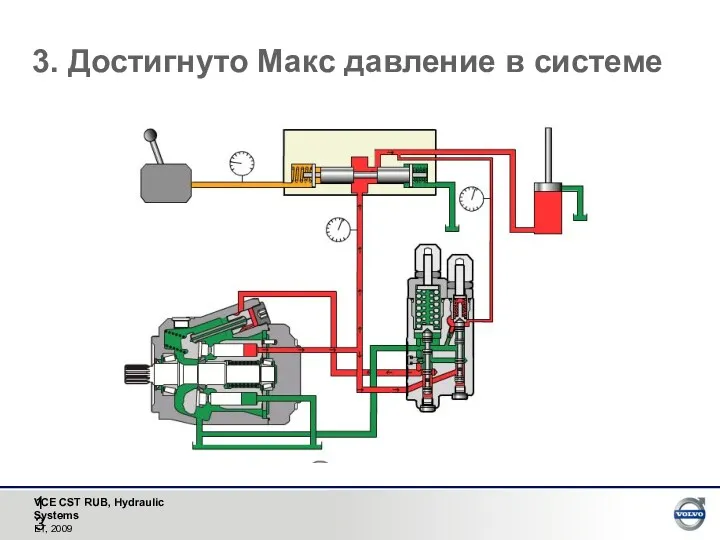
3. Достигнуто Макс давление в системе
3. Достигнуто Макс давление в системе
ΔP
В системах LS давление на насосе всегда больше на значение
ΔP
В системах LS давление на насосе всегда больше на значение
Управление расходом:
Поток от насоса – зависит только от величины открытия
Управление расходом: Поток от насоса – зависит только от величины открытия
Принцип LS
Давление в линии LS – это давление после падения
Принцип LS
Давление в линии LS – это давление после падения
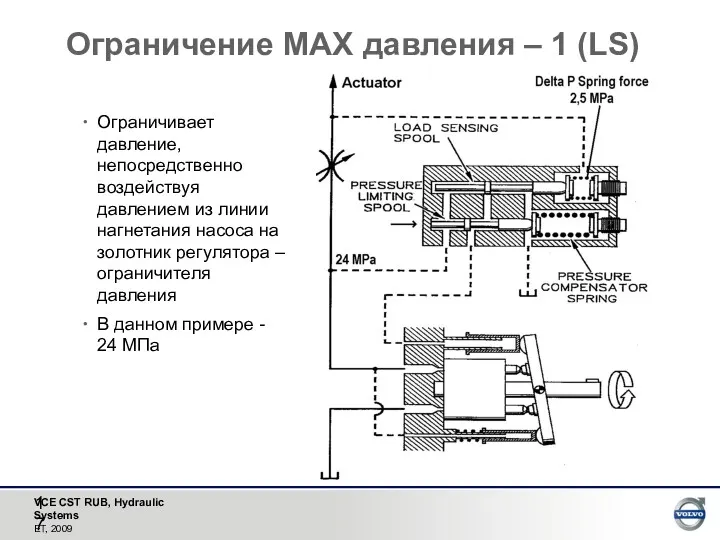
Ограничение MAX давления – 1 (LS)
Ограничивает давление, непосредственно воздействуя давлением из
Ограничение MAX давления – 1 (LS)
Ограничивает давление, непосредственно воздействуя давлением из
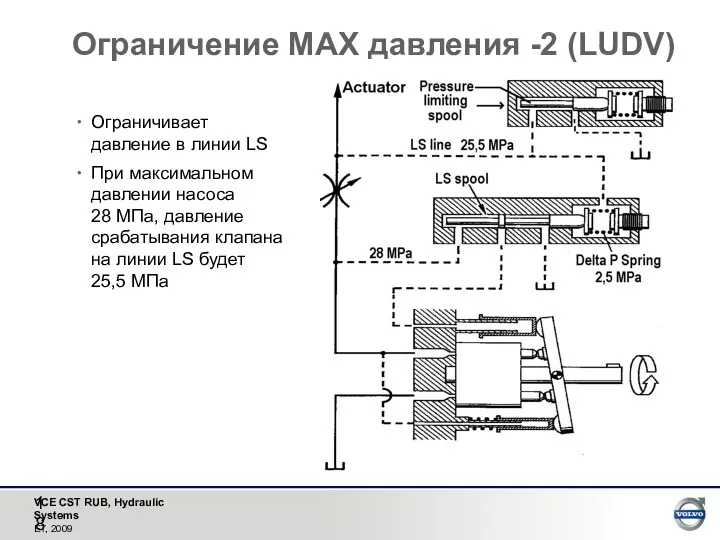
Ограничение MAX давления -2 (LUDV)
Ограничивает давление в линии LS
При максимальном давлении
Ограничение MAX давления -2 (LUDV)
Ограничивает давление в линии LS
При максимальном давлении
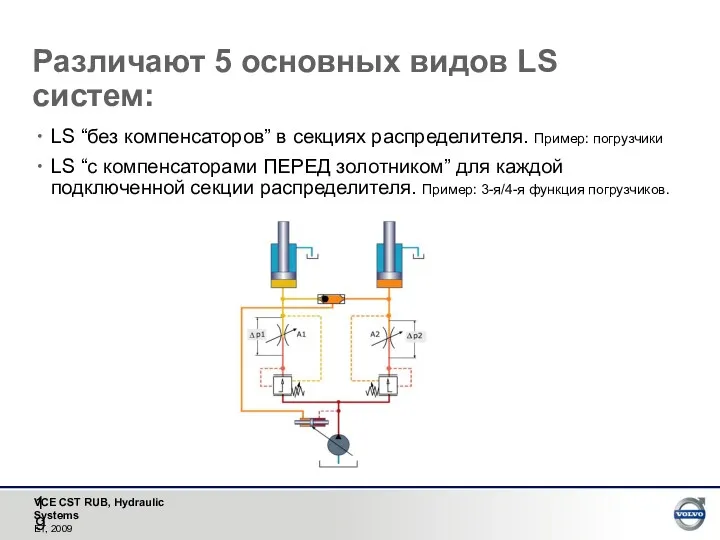
Различают 5 основных видов LS систем:
LS “без компенсаторов” в секциях распределителя.
Различают 5 основных видов LS систем:
LS “без компенсаторов” в секциях распределителя.
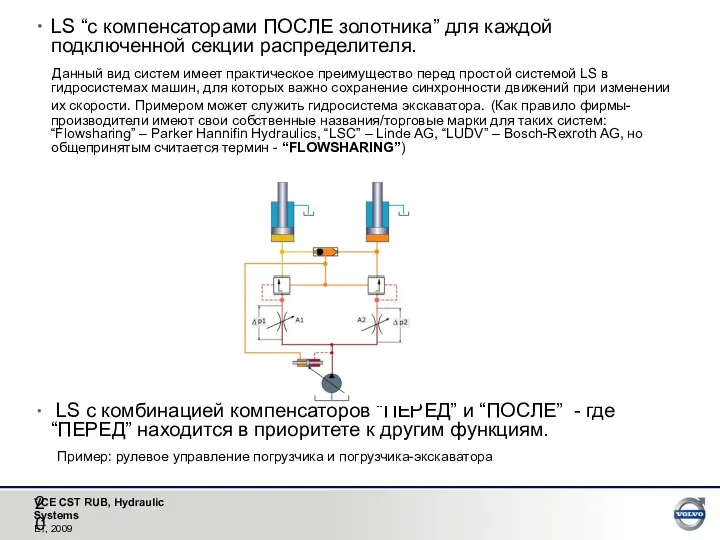
LS “с компенсаторами ПОСЛЕ золотника” для каждой подключенной секции распределителя.
LS “с компенсаторами ПОСЛЕ золотника” для каждой подключенной секции распределителя.
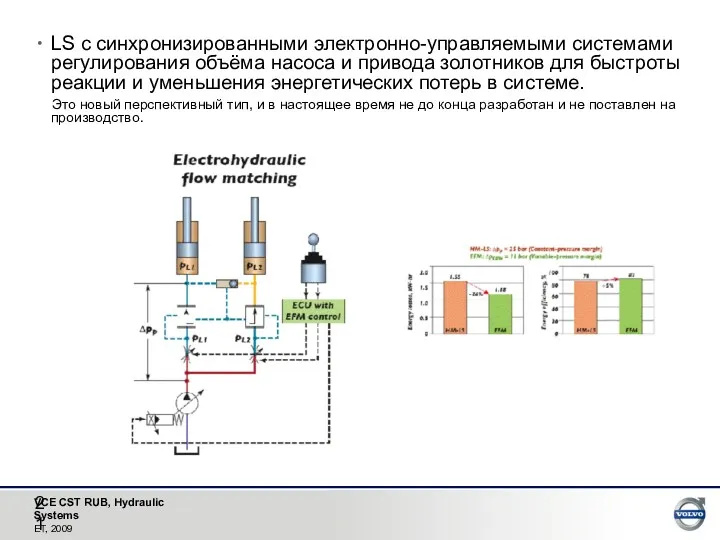
LS с синхронизированными электронно-управляемыми системами регулирования объёма насоса и привода золотников
LS с синхронизированными электронно-управляемыми системами регулирования объёма насоса и привода золотников
Простая LS система – погрузчики Volvo:
Простая LS система – погрузчики Volvo:

Простая LS система (погрузчик):
- неконтролируемая неравномерность движения при одновременном движении двух
Простая LS система (погрузчик): - неконтролируемая неравномерность движения при одновременном движении двух
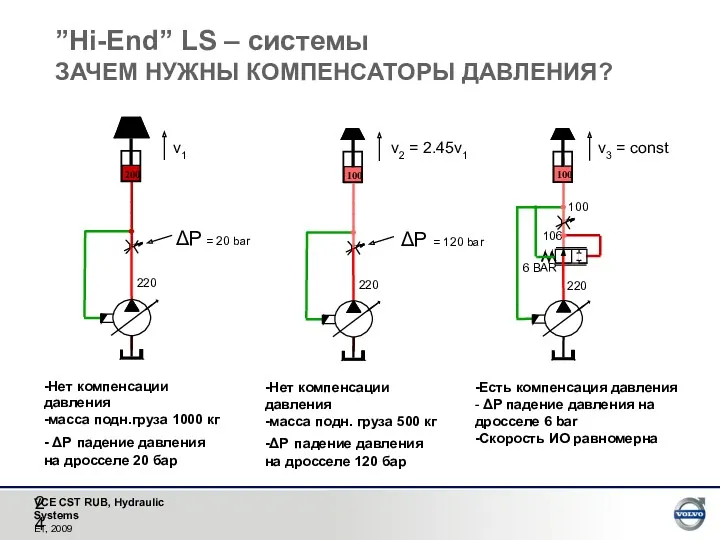
”Hi-End” LS – системы
ЗАЧЕМ НУЖНЫ КОМПЕНСАТОРЫ ДАВЛЕНИЯ?
”Hi-End” LS – системы
ЗАЧЕМ НУЖНЫ КОМПЕНСАТОРЫ ДАВЛЕНИЯ?
(VOAC L90LS)
С компенсаторами потока и давления “ПЕРЕД золотником”
(VOAC L90LS)
С компенсаторами потока и давления “ПЕРЕД золотником”
(VOAC L90LS)
С компенсаторами потока и давления “ПЕРЕД золотником”
(VOAC L90LS)
С компенсаторами потока и давления “ПЕРЕД золотником”
(Rexroth SX - LUDV)
С компенсаторами
“ПОСЛЕ золотника” – (“Flowsharing”)
Система LS работает
(Rexroth SX - LUDV)
С компенсаторами
“ПОСЛЕ золотника” – (“Flowsharing”)
Система LS работает
С компенсаторами
“ПОСЛЕ золотника” – (“Flowsharing”)
(Rexroth SX - LUDV)
С компенсаторами
“ПОСЛЕ золотника” – (“Flowsharing”)
(Rexroth SX - LUDV)
Перепад давления ∆р (прибл. 20 бар), заданный регулятором «давление/поток» на
Перепад давления ∆р (прибл. 20 бар), заданный регулятором «давление/поток» на
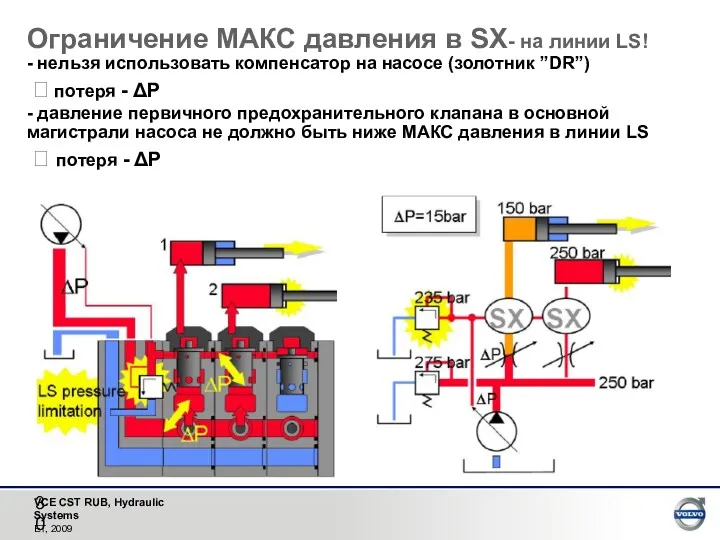
Ограничение МАКС давления в SX- на линии LS!
- нельзя использовать компенсатор
Ограничение МАКС давления в SX- на линии LS! - нельзя использовать компенсатор
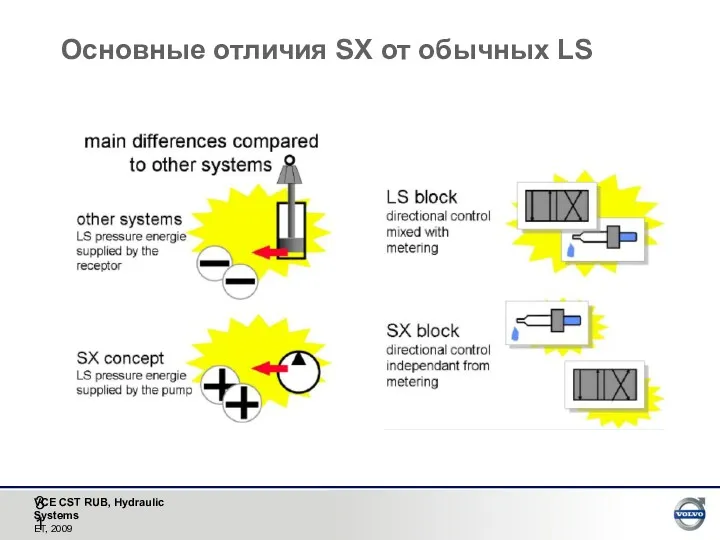
Основные отличия SX от обычных LS
Основные отличия SX от обычных LS
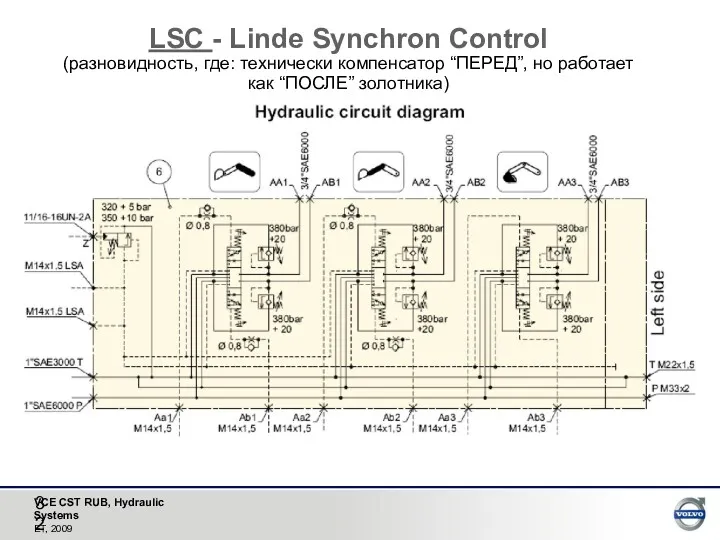
LSC - Linde Synchron Control
(разновидность, где: технически компенсатор “ПЕРЕД”, но работает
LSC - Linde Synchron Control (разновидность, где: технически компенсатор “ПЕРЕД”, но работает

Linde Synchron Control
Linde Synchron Control
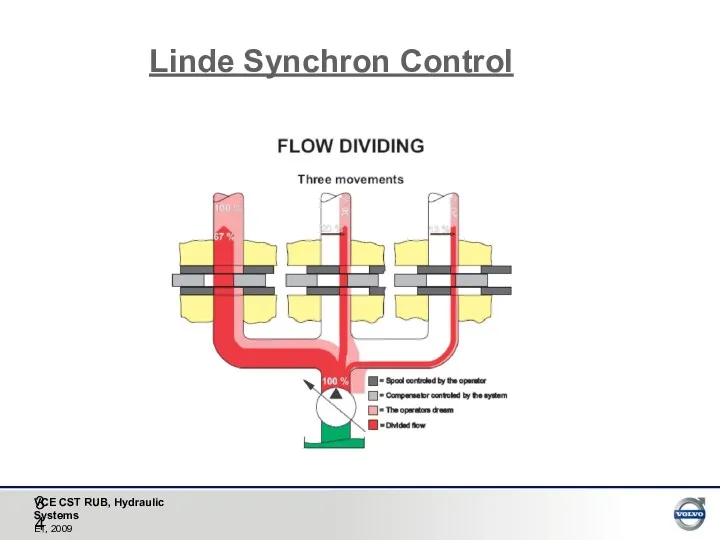
Linde Synchron Control
Linde Synchron Control
ВАРИАНТЫ ОГРАНИЧЕНИЯ МОЩНОСТИ РАБОЧЕГО НАСОСА В СИСТЕМАХ С УПРАВЛЕНИЕМ ПО
ВАРИАНТЫ ОГРАНИЧЕНИЯ МОЩНОСТИ РАБОЧЕГО НАСОСА В СИСТЕМАХ С УПРАВЛЕНИЕМ ПО
1. Регулятор только по макс давлению (- погрузчики, сочлененные самосвалы)
В
1. Регулятор только по макс давлению (- погрузчики, сочлененные самосвалы)
В
1.2 Простое ограничение мощности при малых оборотах двигателя (WLO F-series)
Регулятор насоса
1.2 Простое ограничение мощности при малых оборотах двигателя (WLO F-series)
Регулятор насоса
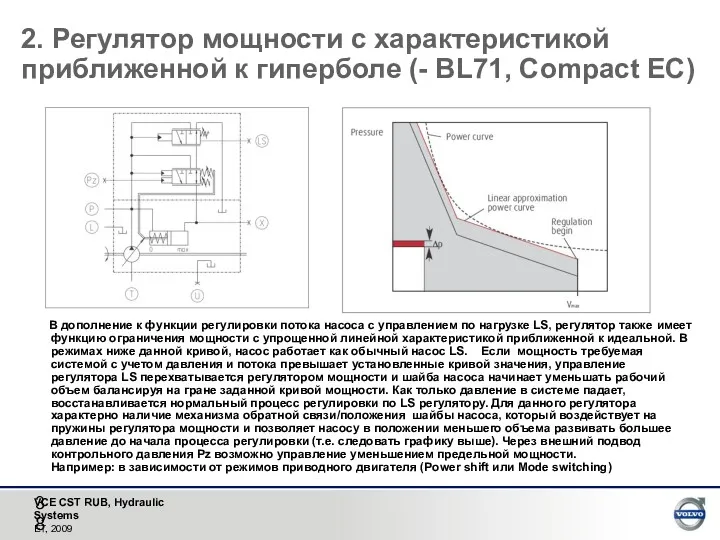
2. Регулятор мощности с характеристикой приближенной к гиперболе (- BL71, Compact
2. Регулятор мощности с характеристикой приближенной к гиперболе (- BL71, Compact
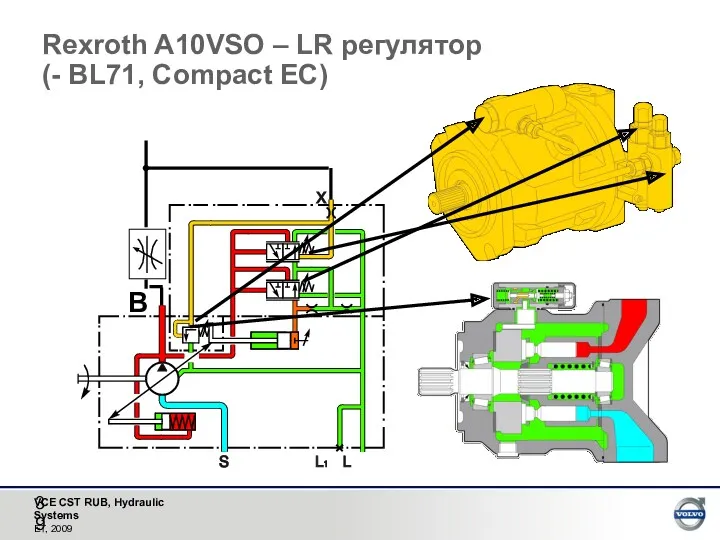
Rexroth A10VSO – LR регулятор (- BL71, Compact EC)
Druckwaage
Leistungsventil
B
Rexroth A10VSO – LR регулятор (- BL71, Compact EC)
Druckwaage
Leistungsventil
B
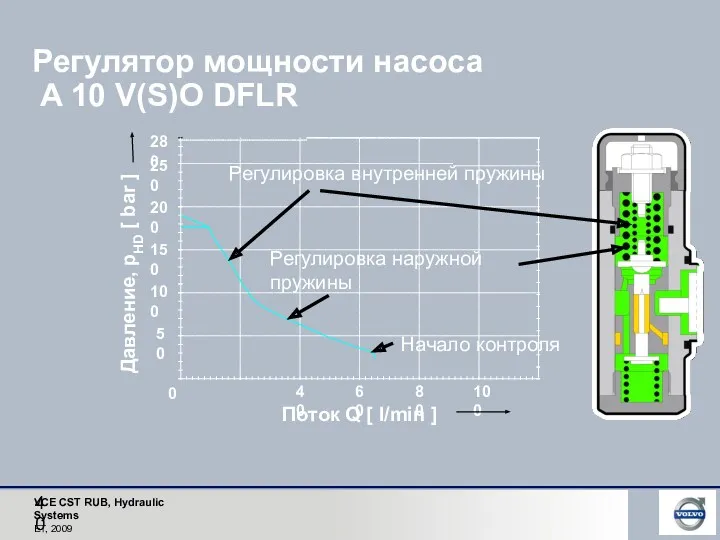
Регулятор мощности насоса
A 10 V(S)O DFLR
50
100
150
200
250
280
0
40
60
80
100
Поток Q [
Регулятор мощности насоса
A 10 V(S)O DFLR
50
100
150
200
250
280
0
40
60
80
100
Поток Q [

3. Регулятор с идеальной гиперболической характеристикой (- не используется в VCE)
3. Регулятор с идеальной гиперболической характеристикой (- не используется в VCE)
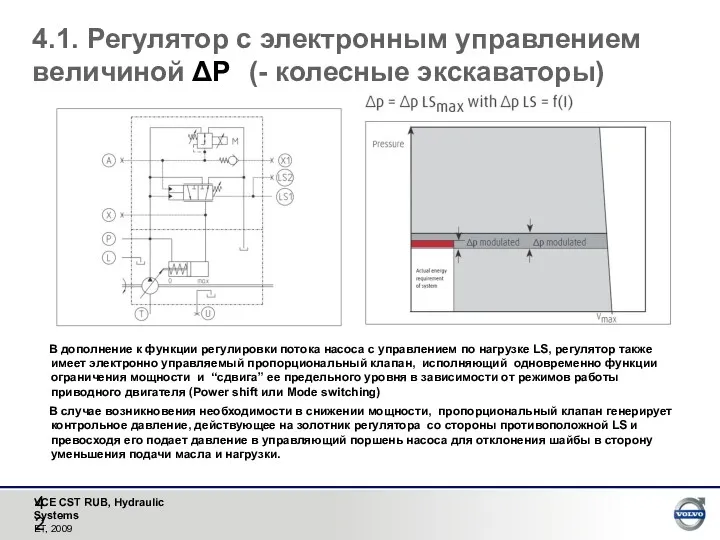
4.1. Регулятор с электронным управлением величиной ΔР (- колесные экскаваторы)
В
4.1. Регулятор с электронным управлением величиной ΔР (- колесные экскаваторы)
В
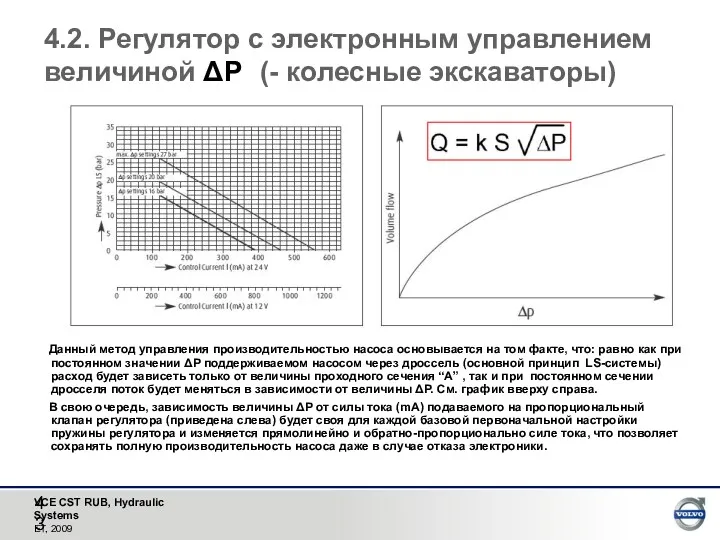
Данный метод управления производительностью насоса основывается на том факте, что:
Данный метод управления производительностью насоса основывается на том факте, что:
 Презентация Влияние ландшафтов на творчество художников
Презентация Влияние ландшафтов на творчество художников Управление финансами и финансовая политика
Управление финансами и финансовая политика Word search
Word search Дидактика Осн категории 1
Дидактика Осн категории 1 Архітерктура другої половини XIX століття
Архітерктура другої половини XIX століття История возникновения химии Диск
История возникновения химии Диск ван
ван Водные ресурсы мира. Ресурсы Мирового океана.
Водные ресурсы мира. Ресурсы Мирового океана. Семинар для воспитателей Введения ФГОС в городе Москве
Семинар для воспитателей Введения ФГОС в городе Москве Федеральный государственный образовательный стандарт дошкольного образования
Федеральный государственный образовательный стандарт дошкольного образования Презентации по дополнительному образованию.
Презентации по дополнительному образованию. 20190106_hantyyskiy_ornament
20190106_hantyyskiy_ornament Микроскоп в клинической лабораторной диагностике
Микроскоп в клинической лабораторной диагностике Телефон доверия
Телефон доверия Есть выбор_ жизнь без наркотиков
Есть выбор_ жизнь без наркотиков Модульная технология обучения на уроках биологии
Модульная технология обучения на уроках биологии традиции Японии
традиции Японии Корпорация Российский учебник
Корпорация Российский учебник Земельный закон братьев Гракхов
Земельный закон братьев Гракхов Отчёт о работе детского оздоровительного лагеря.
Отчёт о работе детского оздоровительного лагеря. Путешествие в историю государственного флага России
Путешествие в историю государственного флага России Взаимодействие музыкального руководителя и воспитателей
Взаимодействие музыкального руководителя и воспитателей Введение в геометрию. Точка и прямая
Введение в геометрию. Точка и прямая Древние люди и их стоянки на территории современной России
Древние люди и их стоянки на территории современной России Здоровьесберегающие технологии на уроках химии
Здоровьесберегающие технологии на уроках химии Кирпич, терракота
Кирпич, терракота Где логика. Игра
Где логика. Игра Конструктивное взаимодействие
Конструктивное взаимодействие