- Гонки шагающих роботов. Соревнование

Содержание
- 2. Задача робота: Двигаться по коридору от зоны старта в зону финиша. По пути движения сбить банки,
- 3. Общий вид шагающего робота с применением механизма Кланна
- 4. С задачей управления таким роботом очень хорошо справляется релейный регулятор на двух датчиках расстояния, направленных в
- 5. Lego EV3, датчики расстояния подключены к портам 1 и 2. Датчик света – к порту 3.
- 6. Составим блок диаграмм в Trik Studio Основная программа будет выглядеть так: Подпрограмма «Прямо» будет выглядеть так:
- 7. Подпрограмму «Налево» Вы составите сами по аналогии с подпрограммой «Направо». Для того, чтобы робот пересек стартовую
- 9. Скачать презентацию
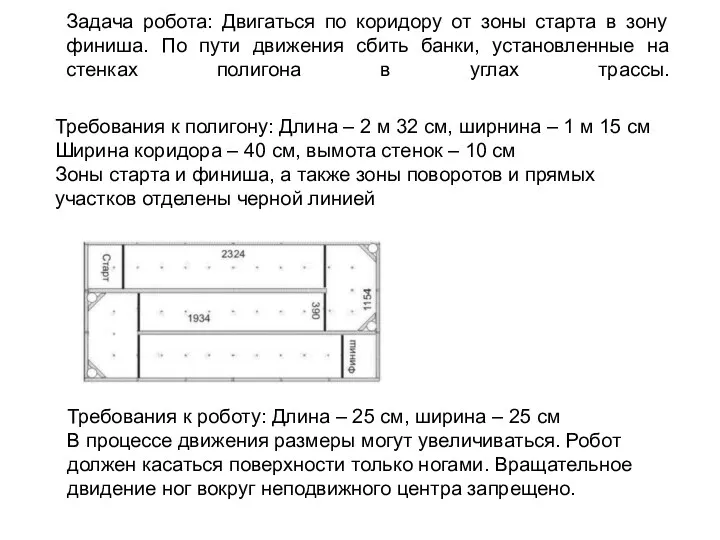
Задача робота: Двигаться по коридору от зоны старта в зону финиша.
Задача робота: Двигаться по коридору от зоны старта в зону финиша.

Общий вид шагающего робота с применением механизма Кланна
Общий вид шагающего робота с применением механизма Кланна
С задачей управления таким роботом очень хорошо справляется релейный регулятор на
С задачей управления таким роботом очень хорошо справляется релейный регулятор на
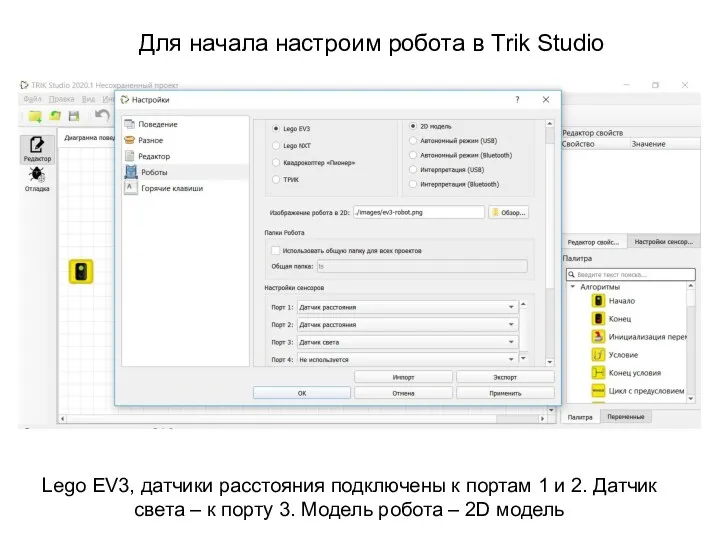
Lego EV3, датчики расстояния подключены к портам 1 и 2. Датчик
Lego EV3, датчики расстояния подключены к портам 1 и 2. Датчик

Составим блок диаграмм в Trik Studio
Основная программа будет выглядеть так:
Подпрограмма «Прямо»
Составим блок диаграмм в Trik Studio
Основная программа будет выглядеть так:
Подпрограмма «Прямо»
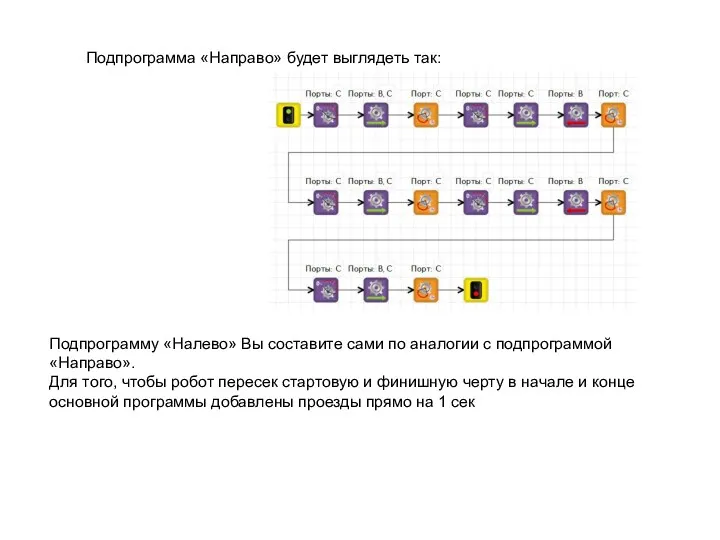
Подпрограмму «Налево» Вы составите сами по аналогии с подпрограммой «Направо».
Для
Подпрограмму «Налево» Вы составите сами по аналогии с подпрограммой «Направо».
Для
 мастер класс Лего
мастер класс Лего Ветеринарна фармакологія
Ветеринарна фармакологія Трудовое право. Основания для увольнений
Трудовое право. Основания для увольнений Сынами славится Россия презентация
Сынами славится Россия презентация Полезные батончики
Полезные батончики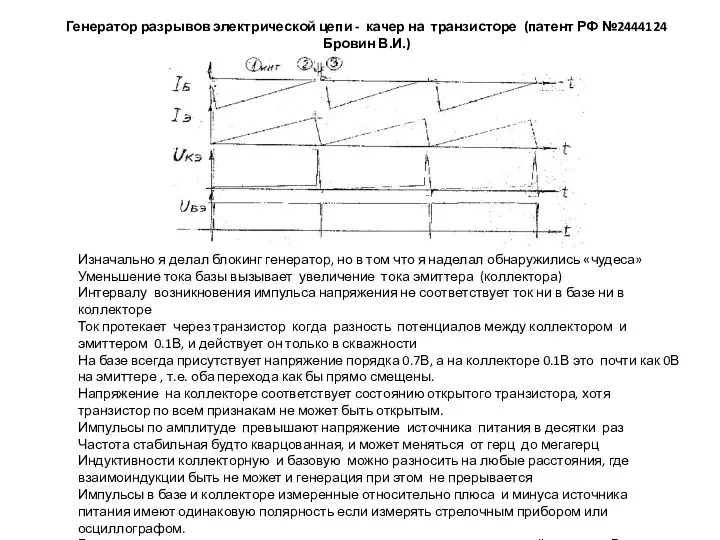 Генератор разрывов электрической цепи-качер на транзисторе
Генератор разрывов электрической цепи-качер на транзисторе Конкурс инновационных проектов и стартапов StartupTur 2019
Конкурс инновационных проектов и стартапов StartupTur 2019 Региональная реклама и …. цифровое телевидение
Региональная реклама и …. цифровое телевидение Эксперимент на уроке биологии
Эксперимент на уроке биологии Серная кислота
Серная кислота Дерево СЧАСТЬЯ
Дерево СЧАСТЬЯ Акбайның туган көне
Акбайның туган көне Основные внутренние составляющие офисного/учебного ПК
Основные внутренние составляющие офисного/учебного ПК Выпускная квалификационная работа: Технология изготовления компьютерного стола
Выпускная квалификационная работа: Технология изготовления компьютерного стола Производство чугуна и стали
Производство чугуна и стали Лабораторная диагностика нарушений гемостаза
Лабораторная диагностика нарушений гемостаза Англицизмы в русском языке
Англицизмы в русском языке ПРЕЗЕНТАЦИЯ о программе ШКОЛА РОССИИ
ПРЕЗЕНТАЦИЯ о программе ШКОЛА РОССИИ Сахарный диабет мелких домашних животных
Сахарный диабет мелких домашних животных Технология на 3 февраля
Технология на 3 февраля Сапфиры Мьянмы
Сапфиры Мьянмы Здоровье и безопасность детей в мире компьютерных технологий и интернет
Здоровье и безопасность детей в мире компьютерных технологий и интернет Презентация к уроку по теме Гомологи бензола
Презентация к уроку по теме Гомологи бензола Презентация к классному часу, посвященному Г. Пономаренко Певец России - Г.Пономаренко
Презентация к классному часу, посвященному Г. Пономаренко Певец России - Г.Пономаренко Российский стандарт блочного шифрования ГОСТ 28147-89
Российский стандарт блочного шифрования ГОСТ 28147-89 Анатомо-физиологичекие данные слизистой оболочки полости рта. Патологические процессы. Элементы поражения
Анатомо-физиологичекие данные слизистой оболочки полости рта. Патологические процессы. Элементы поражения Мастер-класс Крокусы
Мастер-класс Крокусы Кейс-метод
Кейс-метод