- Границы применимости классической механики. Кинематика

Содержание
- 2. скорость спутника или космического корабля порядка 10 км/с. скорость движения Земли по орбите вокруг Солнца (30
- 3. Пространственно-временные системы отсчета Движение — это перемещение тела относительно других тел (изменение его положения в пространстве).
- 4. левая система переходит в правую при изменении направления одной из осей, например оси x, на противоположное
- 5. Левая система координат переходит в правую также и при изменении направления всех трех координатных осей (x
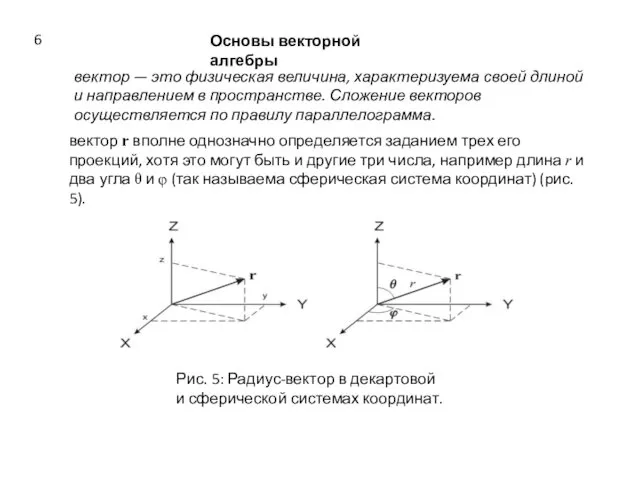
- 6. Основы векторной алгебры вектор — это физическая величина, характеризуема своей длиной и направлением в пространстве. Сложение
- 7. Декартовы координаты со сферическими связаны соотношениями (2) В частном случае θ = π/2 получаем полярную систему
- 8. закон сложения векторов по правилу параллелограмма (pис. 6). Рис. 6: Разложение радиус-вектора на составляющие вдоль координатных
- 9. С другой стороны, Но в силу взаимной ортогональности векторов i, j и k их скалярные произведения
- 10. Перемещение, скорость и ускорение материальной точки. Рис. 7: Траектория и перемещение материальной точки. Пусть радиус-вектор материальной
- 11. Отношение перемещения материальной точки ∆r12 к интервалу времени ∆t12 = t2 − t1, то есть ∆r12/∆t12,
- 12. По определению, скорость материальной точки равна Это вектор (направленный по касательной к траектории в точке, соответствующей
- 13. Аналогичным образом можно определить вектор a(t), характеризующий скорость изменения скорости частицы и называемый ускорением: Оно определяется
- 14. Путь Рассмотрим произвольного вида траекторию, по которой движется материальная точка. Рис. 9: Как найти путь? Пусть
- 15. Число таких интервалов равно Векторы перемещения материальной точки ∆ri (i = 1, 2,..., n) в каждом
- 16. можно поменять местами операции суммирования и предельного перехода и вспомнить, что предел равен скорости частицы v
- 17. путь, пройденный частицей в интервале ее движения от t1 до t2, равен определенному интегралу по времени
- 18. Теорема Ньютона — Лейбница Рис. 11: Теорема Ньютона-Лейбница. Формула Ньютона—Лейбница или основная теорема анализа даёт соотношение
- 19. есть площадь под кривой f(t) в интервале от t1 до t + ∆t. Разность этих площадей
- 20. Над дверью своего деревенского дома Нильс Бор прибил подкову, которая, согласно поверью, должна приносить счастье. Увидев
- 22. Скачать презентацию
скорость спутника или космического корабля порядка 10 км/с.
скорость движения Земли по
скорость спутника или космического корабля порядка 10 км/с.
скорость движения Земли по
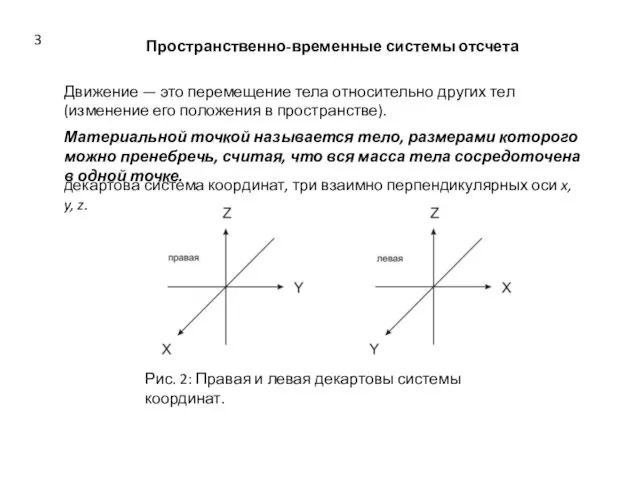
Пространственно-временные системы отсчета
Движение — это перемещение тела относительно других тел (изменение
Пространственно-временные системы отсчета
Движение — это перемещение тела относительно других тел (изменение
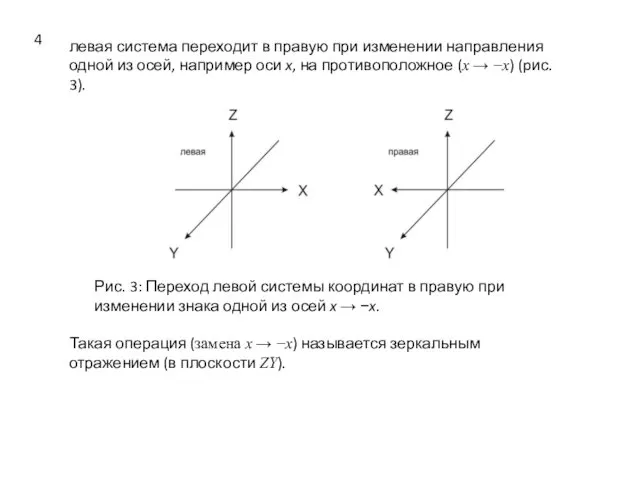
левая система переходит в правую при изменении направления одной из осей,
левая система переходит в правую при изменении направления одной из осей,
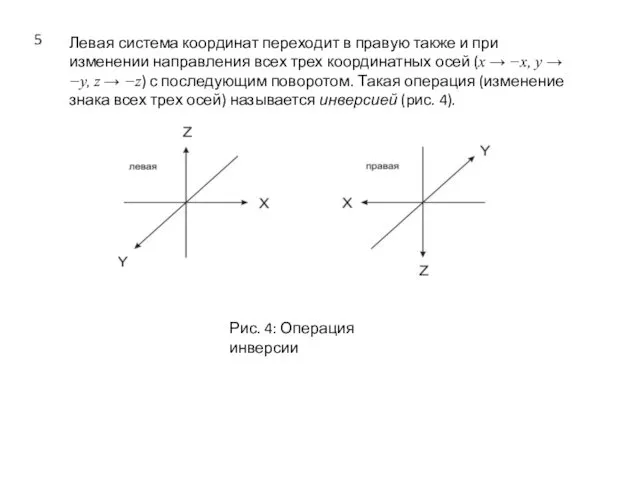
Левая система координат переходит в правую также и при изменении направления
Левая система координат переходит в правую также и при изменении направления
Основы векторной алгебры
вектор — это физическая величина, характеризуема своей длиной и
Основы векторной алгебры
вектор — это физическая величина, характеризуема своей длиной и
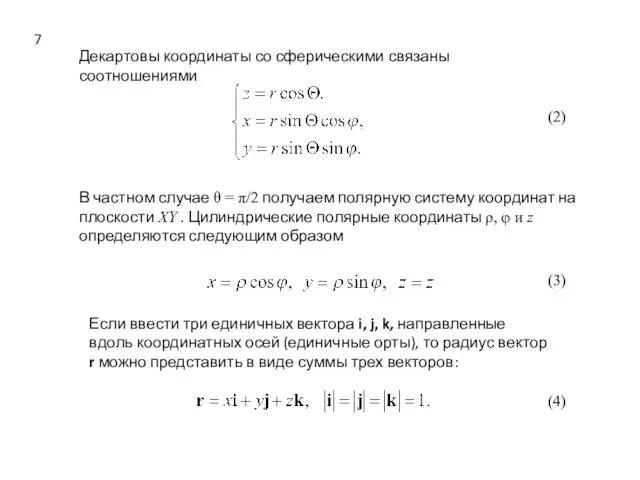
Декартовы координаты со сферическими связаны соотношениями
(2)
В частном случае θ = π/2
Декартовы координаты со сферическими связаны соотношениями
(2)
В частном случае θ = π/2
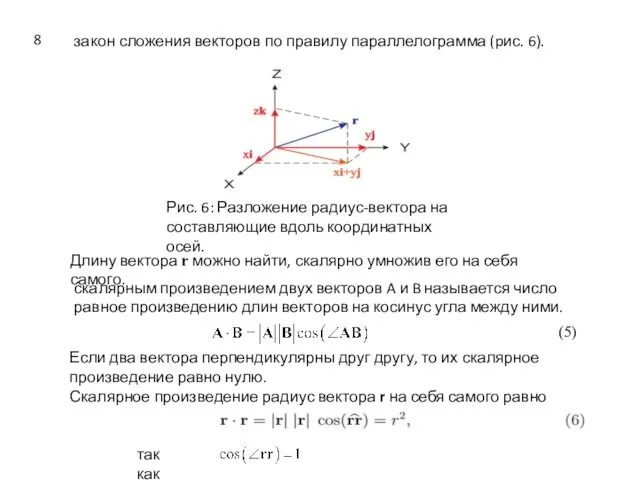
закон сложения векторов по правилу параллелограмма (pис. 6).
Рис. 6: Разложение радиус-вектора
закон сложения векторов по правилу параллелограмма (pис. 6).
Рис. 6: Разложение радиус-вектора
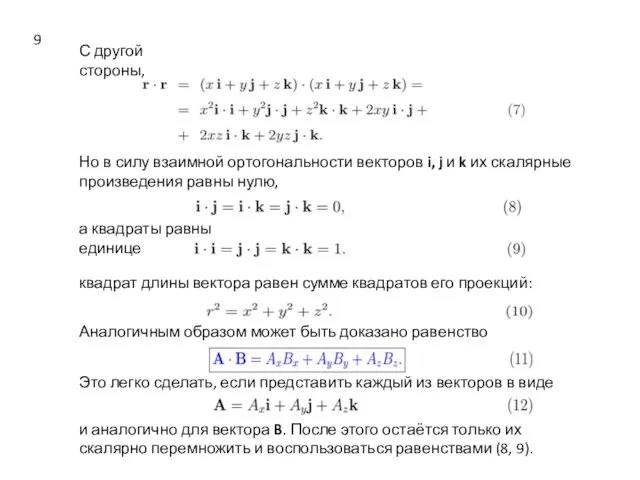
С другой стороны,
Но в силу взаимной ортогональности векторов i, j и
С другой стороны,
Но в силу взаимной ортогональности векторов i, j и
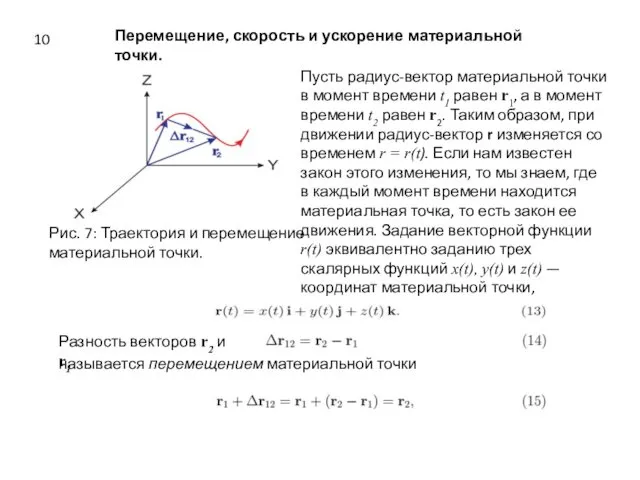
Перемещение, скорость и ускорение материальной точки.
Рис. 7: Траектория и перемещение материальной
Перемещение, скорость и ускорение материальной точки.
Рис. 7: Траектория и перемещение материальной
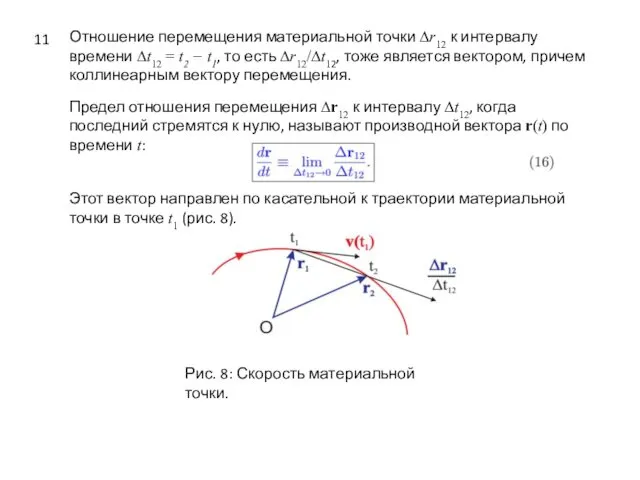
Отношение перемещения материальной точки ∆r12 к интервалу времени ∆t12 = t2
Отношение перемещения материальной точки ∆r12 к интервалу времени ∆t12 = t2
По определению, скорость материальной точки равна
Это вектор (направленный по касательной к
По определению, скорость материальной точки равна
Это вектор (направленный по касательной к
Аналогичным образом можно определить вектор a(t), характеризующий скорость изменения скорости частицы
Аналогичным образом можно определить вектор a(t), характеризующий скорость изменения скорости частицы

Путь
Рассмотрим произвольного вида траекторию, по которой движется материальная точка.
Рис. 9:
Путь
Рассмотрим произвольного вида траекторию, по которой движется материальная точка.
Рис. 9:
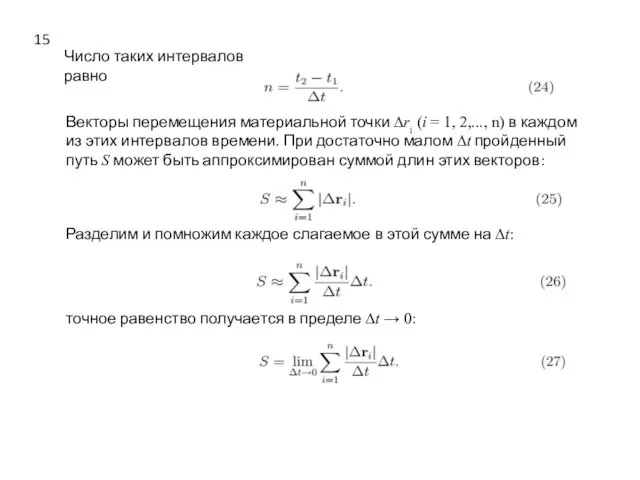
Число таких интервалов равно
Векторы перемещения материальной точки ∆ri (i = 1,
Число таких интервалов равно
Векторы перемещения материальной точки ∆ri (i = 1,
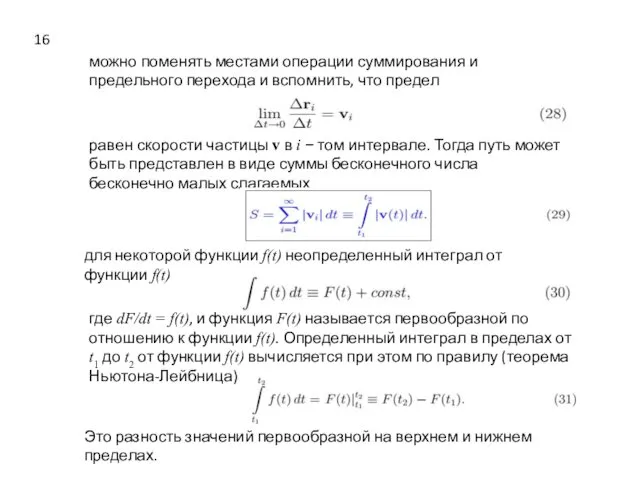
можно поменять местами операции суммирования и предельного перехода и вспомнить, что
можно поменять местами операции суммирования и предельного перехода и вспомнить, что
путь, пройденный частицей в интервале ее движения от t1 до t2,
путь, пройденный частицей в интервале ее движения от t1 до t2,
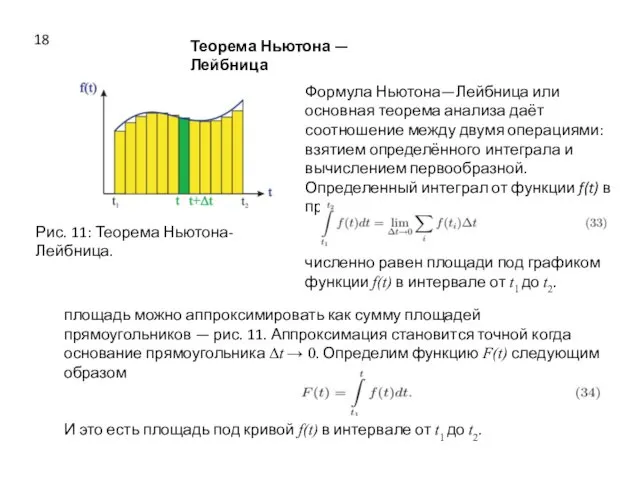
Теорема Ньютона — Лейбница
Рис. 11: Теорема Ньютона-Лейбница.
Формула Ньютона—Лейбница или основная теорема
Теорема Ньютона — Лейбница
Рис. 11: Теорема Ньютона-Лейбница.
Формула Ньютона—Лейбница или основная теорема
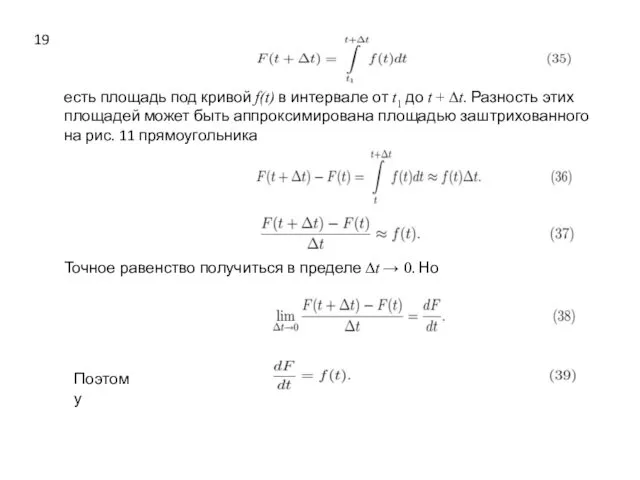
есть площадь под кривой f(t) в интервале от t1 до t
есть площадь под кривой f(t) в интервале от t1 до t
Над дверью своего деревенского дома Нильс Бор прибил подкову, которая, согласно
Над дверью своего деревенского дома Нильс Бор прибил подкову, которая, согласно
 Тема Великой Войны на уроках географии
Тема Великой Войны на уроках географии Технологии машиностроения. Базы в машиностроении. Классификация баз
Технологии машиностроения. Базы в машиностроении. Классификация баз Оценка образовательных результатов
Оценка образовательных результатов Обеспечение личной безопасности на водоемах в различное время года
Обеспечение личной безопасности на водоемах в различное время года Обособленные уточняющие члены предложения. Знаки препинания при них
Обособленные уточняющие члены предложения. Знаки препинания при них Классный час Поговорим о дружбе
Классный час Поговорим о дружбе Компания ООО Русский Базальт. Производство базальтового непрерывного волокна и продукции на его основе
Компания ООО Русский Базальт. Производство базальтового непрерывного волокна и продукции на его основе 20230916_risuem_po_koordinatam
20230916_risuem_po_koordinatam Роль особи Жана Кальвіна в добу реформації
Роль особи Жана Кальвіна в добу реформації Проект А у нас огород на окне
Проект А у нас огород на окне Укрепление грунтов оснований
Укрепление грунтов оснований презентация Простые вещества - неметаллы
презентация Простые вещества - неметаллы Вам, нашим мамам, самым любимым и самым желанным!
Вам, нашим мамам, самым любимым и самым желанным! Экологические сообщества
Экологические сообщества проверка - закрепление по теме Общие сведения о галогеноводородах
проверка - закрепление по теме Общие сведения о галогеноводородах Геологические процессы в недрах Земли
Геологические процессы в недрах Земли Профессия воспитатель
Профессия воспитатель Архитектурные шрифты. Правила построения
Архитектурные шрифты. Правила построения Методическая разработка урока благотворительности Дорогой доброты,
Методическая разработка урока благотворительности Дорогой доброты, Санитарно-гигиенические условия обеспечения учебного процесса
Санитарно-гигиенические условия обеспечения учебного процесса Предохранители. Виды предохранителей
Предохранители. Виды предохранителей Диверсификация производств и интеграция строительных организаций
Диверсификация производств и интеграция строительных организаций Синэкология (экология сообществ)
Синэкология (экология сообществ) Конструкт урока Ъ и Ь
Конструкт урока Ъ и Ь Информационная культура в непрерывном образовании личности. Комфортная информационная среда. (Тема 1)
Информационная культура в непрерывном образовании личности. Комфортная информационная среда. (Тема 1)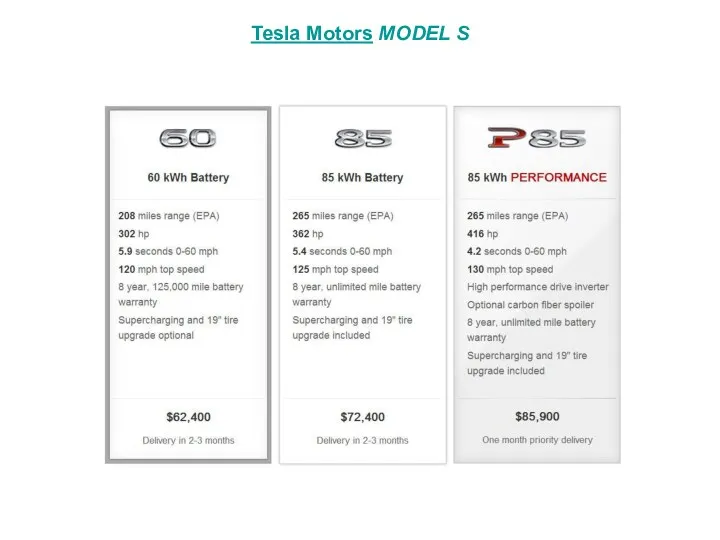 Tesla Motors MODEL S. Электромобиль
Tesla Motors MODEL S. Электромобиль Презентация хлеб
Презентация хлеб Религия, как форма общественного сознания
Религия, как форма общественного сознания