- Индуктивные датчики

Содержание
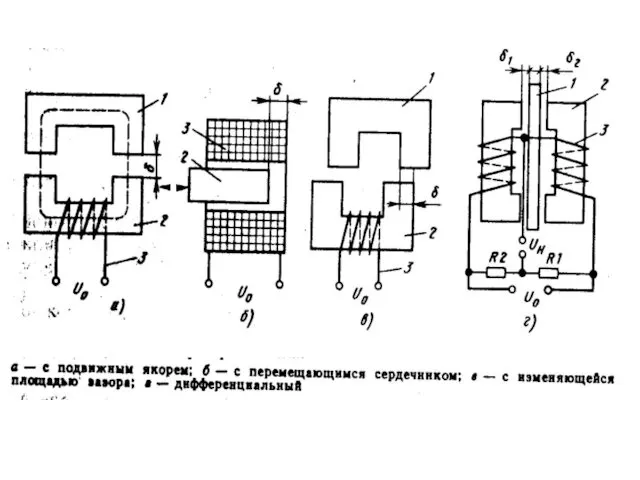
- 3. Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности 3 с магнитопроводом 2 и
- 4. Индуктивные преобразователи с перемещающимся магнитопроводом (рис, 5, б) способны измерять большие перемещения (до 50 мм). У
- 5. Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически неограниченный срок службы и большую
- 6. Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные плечи мостовой измерительной схемы. Дифференциальные
- 8. Емкостные датчики Емкостные преобразователи преобразуют неэлектрические величины (перемещение, уровень жидкости, влажность, усилие и т. д.) в
- 9. Чувствительный элемент емкостного преобразователя представляет собой плоский или цилиндрический конденсатор, у которого при воздействии измеряемого параметра
- 10. Учитывая влияние перечисленных факторов на размеры чувствительного элемента, различают три типа емкостных преобразователей: с переменным расстоянием
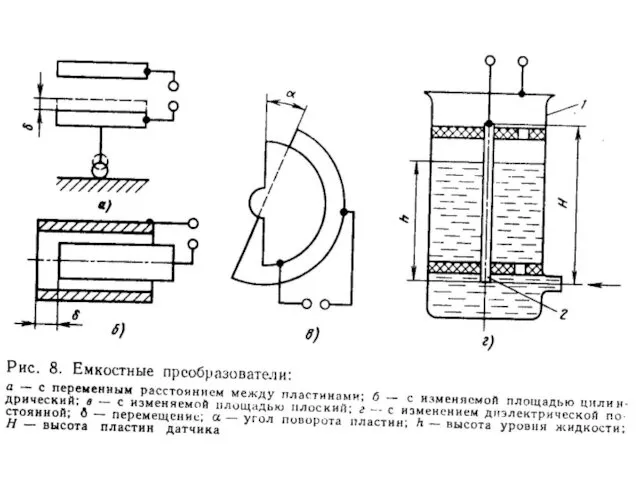
- 12. Емкостные преобразователи с переменным расстоянием между пластинами (рис. 8, а) конструктивно выполняют в виде плоского конденсатора,
- 13. Цилиндрический емкостной преобразователь (рис. 8, б) представляет собой два цилиндра разного диаметра, помещаемые один в другой.
- 14. Емкостные преобразователи с изменением диэлектрической проницаемости среды между пластинами применяют для регулирования влажности формовочной смеси и
- 16. Скачать презентацию
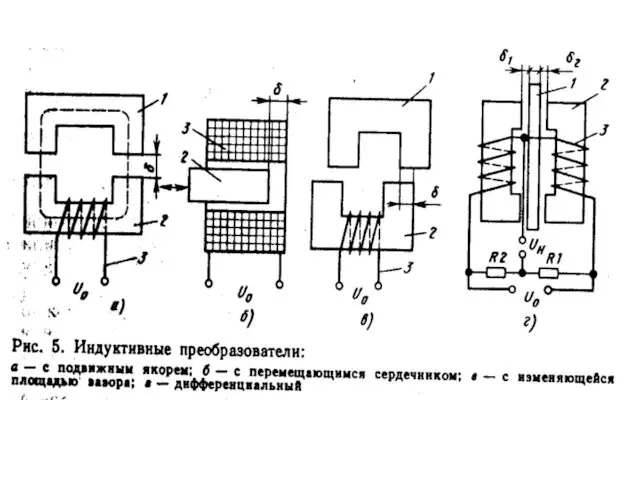
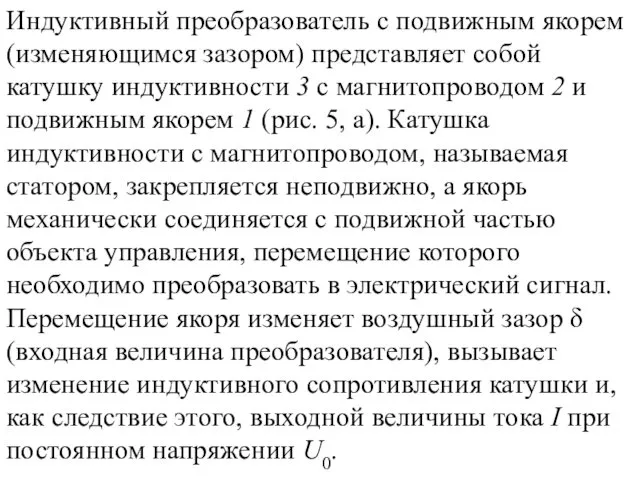
Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности
Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности
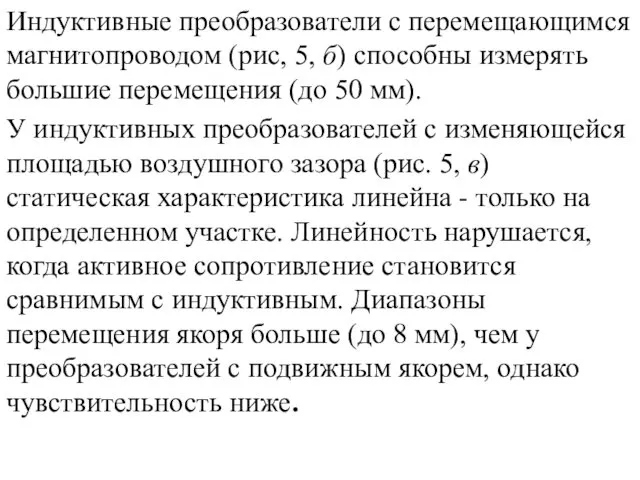
Индуктивные преобразователи с перемещающимся магнитопроводом (рис, 5, б) способны измерять большие
Индуктивные преобразователи с перемещающимся магнитопроводом (рис, 5, б) способны измерять большие
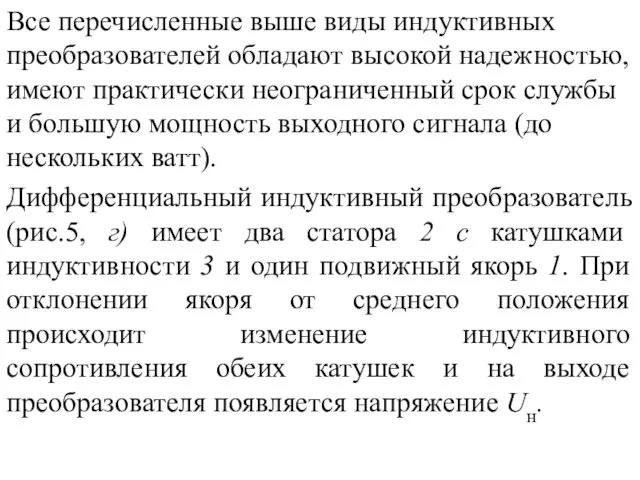
Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически
Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически
Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные
Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные
Емкостные датчики
Емкостные преобразователи преобразуют неэлектрические величины (перемещение, уровень жидкости, влажность, усилие
Емкостные датчики
Емкостные преобразователи преобразуют неэлектрические величины (перемещение, уровень жидкости, влажность, усилие
Чувствительный элемент емкостного преобразователя представляет собой плоский или цилиндрический конденсатор, у
Чувствительный элемент емкостного преобразователя представляет собой плоский или цилиндрический конденсатор, у
Учитывая влияние перечисленных факторов на размеры чувствительного элемента, различают три типа
Учитывая влияние перечисленных факторов на размеры чувствительного элемента, различают три типа
Емкостные преобразователи с переменным расстоянием между пластинами (рис. 8, а) конструктивно
Емкостные преобразователи с переменным расстоянием между пластинами (рис. 8, а) конструктивно
Цилиндрический емкостной преобразователь (рис. 8, б) представляет собой два цилиндра разного
Цилиндрический емкостной преобразователь (рис. 8, б) представляет собой два цилиндра разного
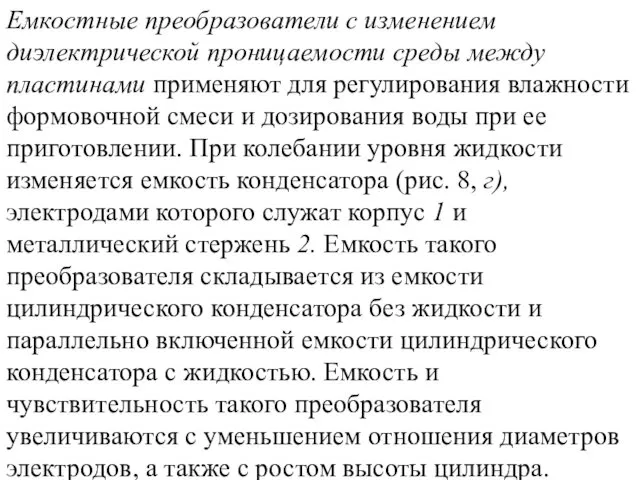
Емкостные преобразователи с изменением диэлектрической проницаемости среды между пластинами применяют для
Емкостные преобразователи с изменением диэлектрической проницаемости среды между пластинами применяют для
 Витагенное обучение как средство активизации познавательного интереса к предмету
Витагенное обучение как средство активизации познавательного интереса к предмету Презентация диплом НАК лемачко версия2
Презентация диплом НАК лемачко версия2 Uralplastic film with Appeel®
Uralplastic film with Appeel® Регламентация деятельности Федерального казначейства по осуществлению внутреннего государственного контроля и внутреннего аудита
Регламентация деятельности Федерального казначейства по осуществлению внутреннего государственного контроля и внутреннего аудита Устройства автоматики, телемеханики и связи
Устройства автоматики, телемеханики и связи Устройство автомобильной шины
Устройство автомобильной шины Бизнес-проект. Ретро кафе
Бизнес-проект. Ретро кафе Портрет в музыке и живописи
Портрет в музыке и живописи 20231031_mo
20231031_mo Автомобили
Автомобили Источники тепла систем теплоснабжения
Источники тепла систем теплоснабжения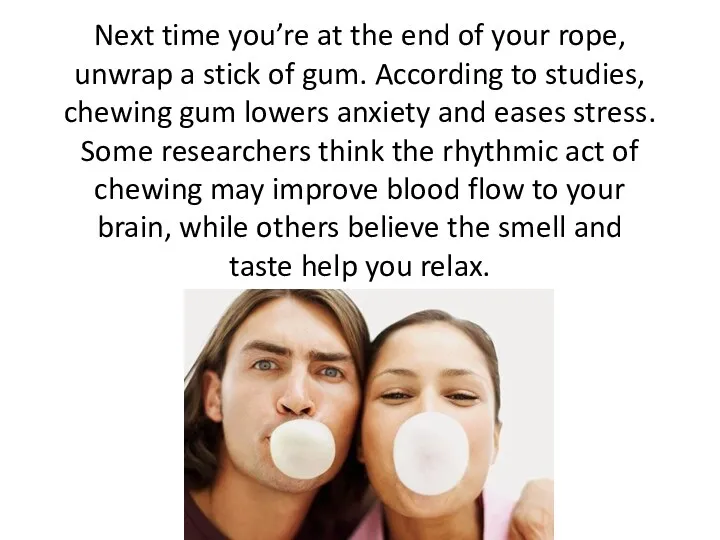 Презентация на английском How to avoid stress Как избежать стресс
Презентация на английском How to avoid stress Как избежать стресс 10 вопросов о лютеранстве
10 вопросов о лютеранстве Импульсные сверхширокополосные сигналы и перспективы их применения в РЭС
Импульсные сверхширокополосные сигналы и перспективы их применения в РЭС A trip to America
A trip to America Комбинационные устройства. Шифраторы
Комбинационные устройства. Шифраторы Единицы объёма. Решение задач на нахождение объёма
Единицы объёма. Решение задач на нахождение объёма Тері өңдеу
Тері өңдеу вся жизнь - страна детства
вся жизнь - страна детства Требования тарифно-квалификационного справочника работ и профессий рабочих электроэнергетики
Требования тарифно-квалификационного справочника работ и профессий рабочих электроэнергетики Роспись салфетки в технике мезенской росписи
Роспись салфетки в технике мезенской росписи изготовление куклы-закрутки (зайчик)
изготовление куклы-закрутки (зайчик) Процессоры. Микропроцессор
Процессоры. Микропроцессор Анализ эффективности при борьбе с солеотложениями на добывающих скважинах средне-харьягинского месторождения
Анализ эффективности при борьбе с солеотложениями на добывающих скважинах средне-харьягинского месторождения Огород на окне. Экологический проект
Огород на окне. Экологический проект Правление Алексея Михайловича Романова (1645 – 1676гг.)
Правление Алексея Михайловича Романова (1645 – 1676гг.) Anton Pavlovich Chekhov
Anton Pavlovich Chekhov Откуда приходит новый год
Откуда приходит новый год