- Инструктаж по ТБ и ОТ. Введение: инструктаж, знакомство

Содержание
- 2. Инструктаж по ТБ и ОТ
- 3. Умные дома и города Повышение уровня безопасности, качества освещения, звука и многое другое. Принятые сокращения Беспилотные
- 4. Принятые сокращения БПЛА – беспилотный летательный аппарат ВПП – взлетно-посадочная полоса ДВС – двигатель внутреннего сгорания
- 5. Определение
- 6. Беспилотный летательный аппарат (БПЛА)* Это ЛА, не имеющий экипажа на борту. DJI Phantom 4 — гражданский
- 7. Достоинства и недостатки
- 8. Достоинства нет опасности для жизни пилота меньше стоимость, чем у пилотируемых ЛА меньший расход топлива из-за
- 9. Недостатки возможность подавления или перехвата управления MQ-1 Predator (США), 1994 г. Скорость . . . .
- 10. Классификация
- 11. научные; прикладные: военные (ударные); гражданские. По назначению: MQ-9 Reaper (США), 2001 г. Скорость . . .
- 12. «микро» - до 10 кг, время полёта ≈ 1 ч, высота до 1 км «мини» -
- 13. управляемые автоматически управляемые оператором с пункта управления (ДПЛА) гибридные По типу управления: Northrop Grumman X-47B (США),
- 14. с жестким крылом (самолетного типа) с гибким крылом с вращающимся крылом (вертолетного типа) автожиры конвертопланы мультикоптеры
- 15. С жестким крылом: Подъемная сила создается напором воздуха, набегающего на неподвижное крыло. Отличаются большой длительностью и
- 16. С жестким крылом: Существует много БПЛА самолетного типа. компоновки самолета, которые встречаются Практически все в пилотируемой
- 17. С жестким крылом: В качестве движителей используются тянущие или толкающие винты, а также импеллеры или реактивные
- 18. С жестким крылом: Для взлета необходима ВПП, для некоторых типов – стартовые катапульты. Есть также легкие
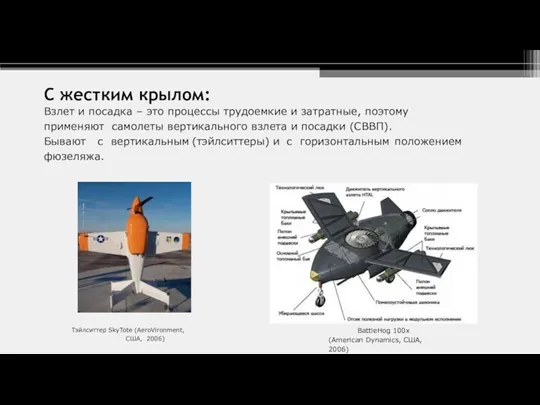
- 19. С жестким крылом: Взлет и посадка – это процессы трудоемкие и затратные, поэтому применяют самолеты вертикального
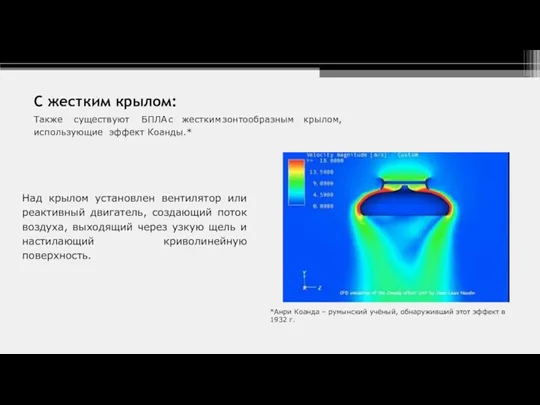
- 20. С жестким крылом: Также существуют БПЛА с жестким зонтообразным крылом, использующие эффект Коанды.* *Анри Коанда –
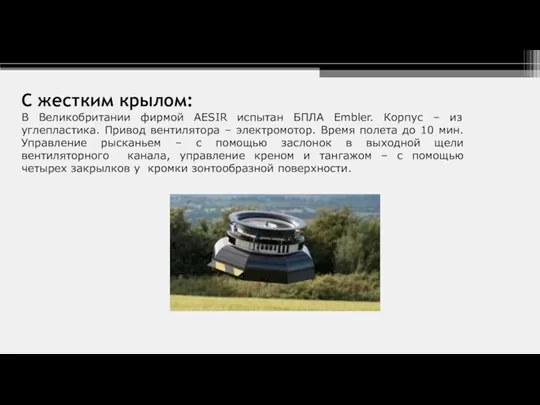
- 21. С жестким крылом: В Великобритании фирмой AESIR испытан БПЛА Embler. Корпус – из углепластика. Привод вентилятора
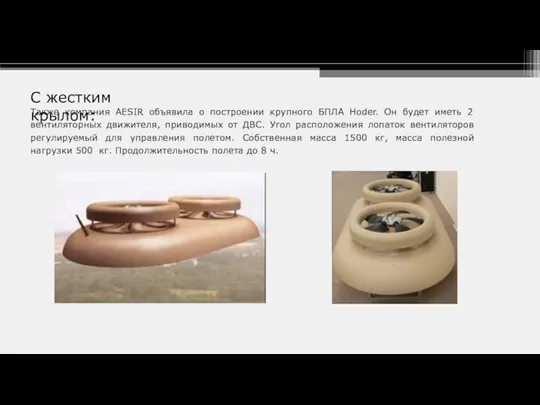
- 22. С жестким крылом: Также компания AESIR объявила о построении крупного БПЛА Hoder. Он будет иметь 2
- 23. С гибким крылом: Это дешевые и экономичные ЛА, в которых используется не жесткое, а гибкое (мягкое)
- 24. БПЛА вертолетного типа: Одновинтовая схема наиболее распространена. Достоинства: простота конструкции и системы управления. Недостатки: большие габариты;
- 25. БПЛА вертолетного типа: дополнительная масса и Двухвинтовая поперечная схема: Достоинства: симметрия схемы; экономичность; высокая грузоподъемность. Недостатки:
- 26. Автожиры: Вместо крыла используется свободно вращающийся винт. Есть также маршевый тянущий (толкающий) винт, который сообщает автожиру
- 27. Конвертопланы: ЛА с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в
- 28. Мультикоптеры: Имеют больше двух несущих винтов. Трикоптер обычно движется двумя винтами вперед, а третий является хвостовым.
- 29. Мультикоптеры: Однако есть другие схемы, в которых корпуса всех двигателей жестко зафиксированы на своих местах. Причем
- 30. Мультикоптеры: Квадрокоптер ‒ самая распространенная среди мультикоптеров схема. Четыре жестко зафиксированных ротора дают возможность организовать довольно
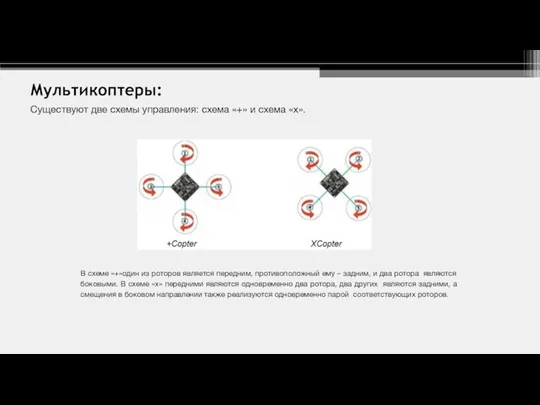
- 31. Мультикоптеры: Существуют две схемы управления: схема «+» и схема «х». В схеме «+»один из роторов является
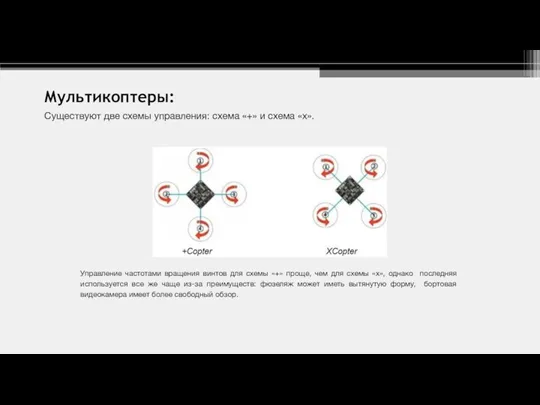
- 32. Мультикоптеры: Существуют две схемы управления: схема «+» и схема «х». Управление частотами вращения винтов для схемы
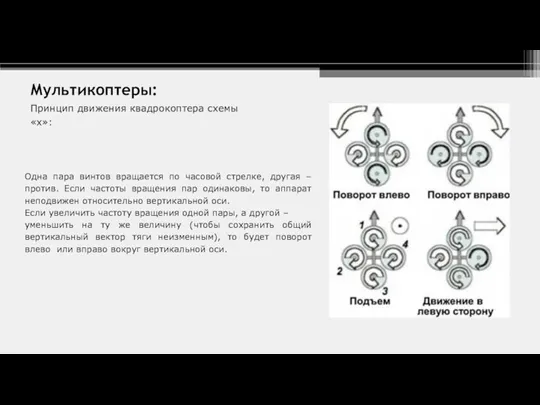
- 33. Мультикоптеры: Принцип движения квадрокоптера схемы «х»: Одна пара винтов вращается по часовой стрелке, другая – против.
- 34. Мультикоптеры: Оборудование квадрокоптера: Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они
- 35. Мультикоптеры: Основное назначение мультикоптеров – это фото- и видеосъемка, поэтому их обычно оснащают управляемыми подвесами для
- 36. Мультикоптеры: Гексакоптеры и октокоптеры имеют соответственно по 6 и 8 роторов, обладают большей грузоподъемностью по сравнению
- 37. С машущим крылом: Орнитоптеры: Механическому привод крыльев должен обеспечивать необходимый набор движений и при этом быть
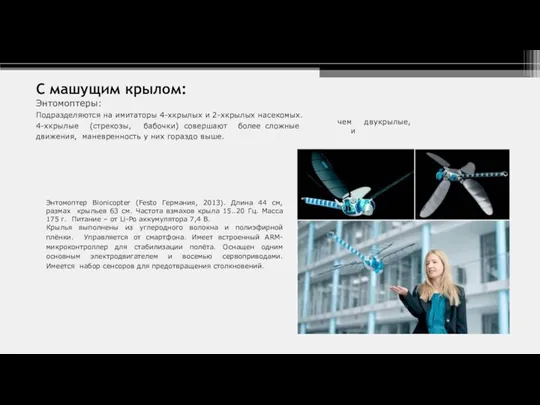
- 38. С машущим крылом: чем двукрылые, и Энтомоптеры: Подразделяются на имитаторы 4-хкрылых и 2-хкрылых насекомых. 4-хкрылые (стрекозы,
- 39. С машущим крылом: Энтомоптеры: Каждое крыло BionicOpter, кроме маховых движений, может совершать вращательные движения вокруг своей
- 40. Аэростатические: Полужёсткие дирижабли имеют в нижней части оболочки жесткую ферму. Дирижабль ДП-27 «Анюта». Дисковидная форма обеспечивает
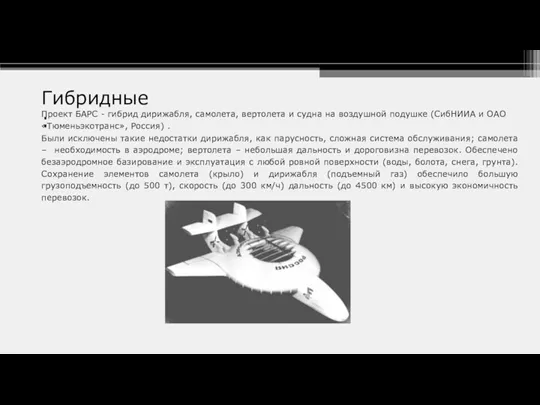
- 41. Гибридные: Проект БАРС - гибрид дирижабля, самолета, вертолета и судна на воздушной подушке (СибНИИА и ОАО
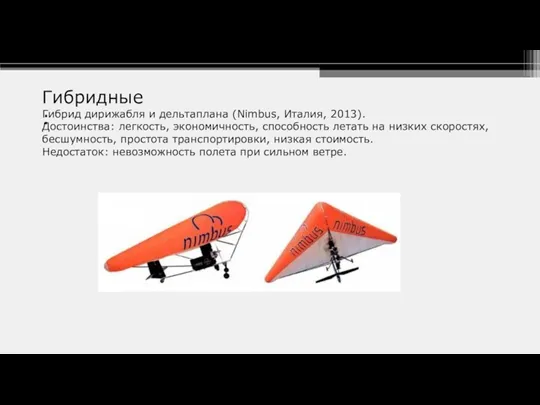
- 42. Гибридные: Гибрид дирижабля и дельтаплана (Nimbus, Италия, 2013). Достоинства: легкость, экономичность, способность летать на низких скоростях,
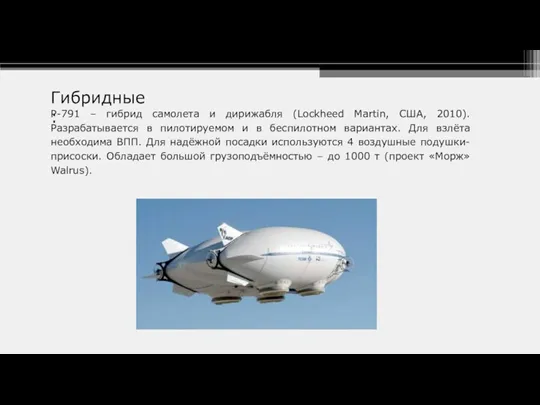
- 43. Гибридные: Р-791 – гибрид самолета и дирижабля (Lockheed Martin, США, 2010). Разрабатывается в пилотируемом и в
- 44. Области применения
- 45. Прикладные: Военные: наблюдательные разведывательные ударные разведывательно-ударные бомбардировочные истребительные (для уничтожения воздушных целей) радиотрансляционные РЭБ транспортные БПЛА-мишени
- 46. Прикладные: Гражданские – разделены на 5 групп: 1. Мониторинг и подобные задачи: видеонаблюдение с целью охраны
- 47. Прикладные: 1. Презентации, реклама, развлечения, творчество: видео- и фотосъемка объектов архитектуры, природы, бизнеса, а также массовых
- 48. Прикладные: 1. Доставка грузов и подобные задачи: доставка почты; доставка инструмента, комплектующих и материалов на строительные
- 49. Прикладные: Ретрансляция сигналов и подобные задачи: ретрансляция радиосигналов с целью увеличения дальности действия каналов связи; использование
- 51. Скачать презентацию
Инструктаж по ТБ и ОТ
Инструктаж по ТБ и ОТ
Умные дома и города
Повышение уровня безопасности, качества освещения, звука и многое
Умные дома и города
Повышение уровня безопасности, качества освещения, звука и многое
Принятые сокращения
БПЛА – беспилотный летательный аппарат
ВПП – взлетно-посадочная полоса
ДВС – двигатель
Принятые сокращения
БПЛА – беспилотный летательный аппарат
ВПП – взлетно-посадочная полоса
ДВС – двигатель
Определение
Определение
Беспилотный летательный аппарат (БПЛА)*
Это ЛА, не имеющий экипажа на борту.
DJI Phantom 4
Беспилотный летательный аппарат (БПЛА)*
Это ЛА, не имеющий экипажа на борту.
DJI Phantom 4
Достоинства и недостатки
Достоинства и недостатки
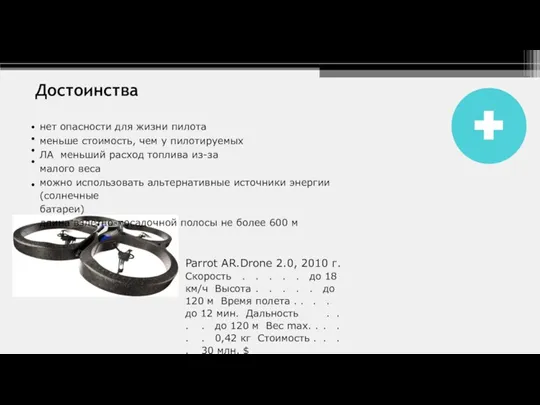
Достоинства
нет опасности для жизни пилота
меньше стоимость, чем у пилотируемых ЛА меньший
Достоинства
нет опасности для жизни пилота
меньше стоимость, чем у пилотируемых ЛА меньший
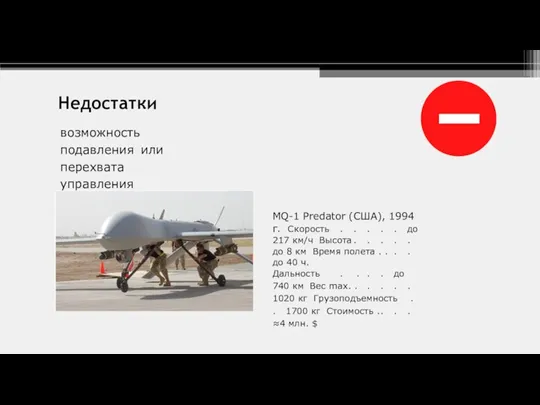
Недостатки
возможность подавления или перехвата управления
MQ-1 Predator (США), 1994 г. Скорость . . . . . до 217 км/ч
Недостатки
возможность подавления или перехвата управления
MQ-1 Predator (США), 1994 г. Скорость . . . . . до 217 км/ч
Классификация
Классификация

научные;
прикладные: военные (ударные); гражданские.
По назначению:
MQ-9 Reaper (США), 2001 г.
Скорость . . . . . до 400 км/ч
научные;
прикладные: военные (ударные); гражданские.
По назначению:
MQ-9 Reaper (США), 2001 г.
Скорость . . . . . до 400 км/ч
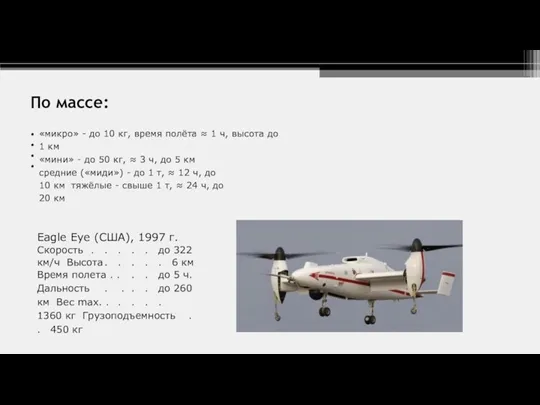
«микро» - до 10 кг, время полёта ≈ 1 ч, высота
«микро» - до 10 кг, время полёта ≈ 1 ч, высота
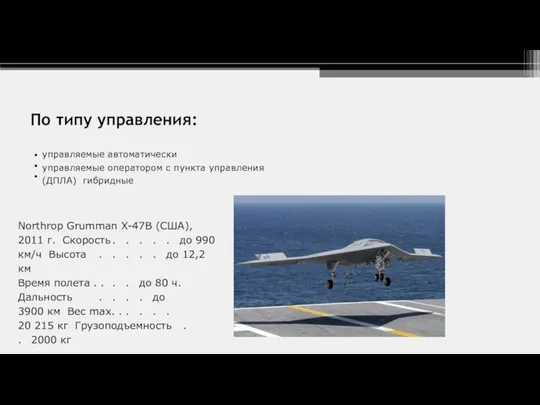
управляемые автоматически
управляемые оператором с пункта управления (ДПЛА) гибридные
По типу управления:
Northrop Grumman
управляемые автоматически
управляемые оператором с пункта управления (ДПЛА) гибридные
По типу управления:
Northrop Grumman
с жестким крылом (самолетного типа)
с гибким крылом
с вращающимся крылом (вертолетного типа)
с жестким крылом (самолетного типа)
с гибким крылом
с вращающимся крылом (вертолетного типа)
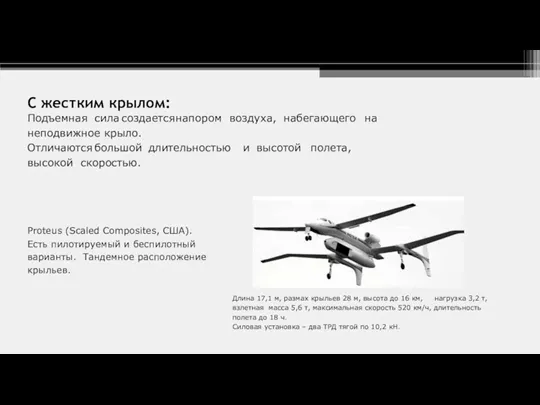
С жестким крылом:
Подъемная сила создается напором воздуха, набегающего на неподвижное крыло.
Отличаются большой длительностью и высотой полета, высокой скоростью.
Proteus (Scaled Composites, США).
Есть пилотируемый и
С жестким крылом:
Подъемная сила создается напором воздуха, набегающего на неподвижное крыло.
Отличаются большой длительностью и высотой полета, высокой скоростью.
Proteus (Scaled Composites, США).
Есть пилотируемый и
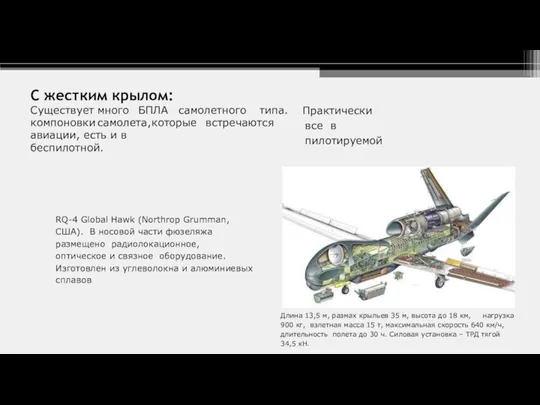
С жестким крылом:
Существует много БПЛА самолетного типа.
компоновки самолета, которые встречаются
Практически все в пилотируемой
авиации, есть и в беспилотной.
RQ-4 Global Hawk (Northrop
С жестким крылом:
Существует много БПЛА самолетного типа.
компоновки самолета, которые встречаются
Практически все в пилотируемой
авиации, есть и в беспилотной.
RQ-4 Global Hawk (Northrop
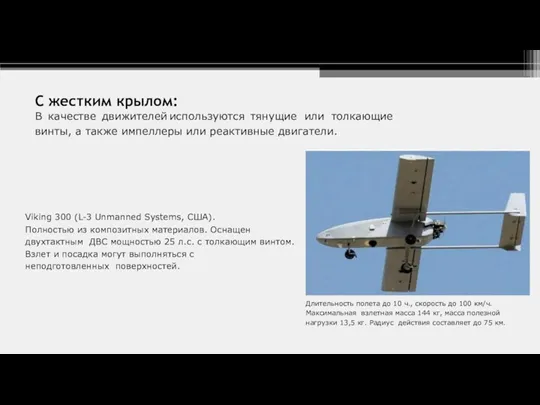
С жестким крылом:
В качестве движителей используются тянущие или толкающие винты, а также импеллеры или реактивные двигатели.
Viking 300
С жестким крылом:
В качестве движителей используются тянущие или толкающие винты, а также импеллеры или реактивные двигатели.
Viking 300
С жестким крылом:
Для взлета необходима ВПП, для некоторых типов – стартовые
С жестким крылом:
Для взлета необходима ВПП, для некоторых типов – стартовые
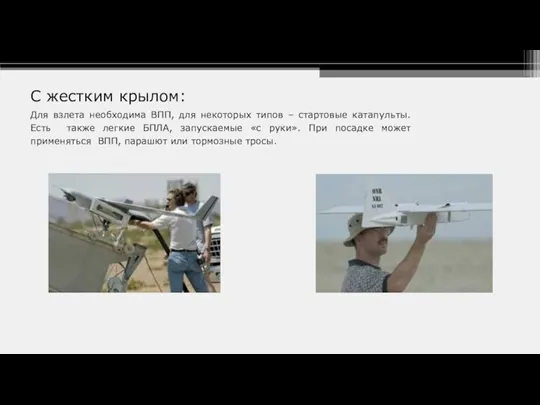
С жестким крылом:
Взлет и посадка – это процессы трудоемкие и затратные,
С жестким крылом:
Взлет и посадка – это процессы трудоемкие и затратные,
С жестким крылом:
Также существуют БПЛА с жестким зонтообразным крылом, использующие эффект Коанды.*
*Анри Коанда – румынский учёный, обнаруживший этот
С жестким крылом:
Также существуют БПЛА с жестким зонтообразным крылом, использующие эффект Коанды.*
*Анри Коанда – румынский учёный, обнаруживший этот
С жестким крылом:
В Великобритании фирмой AESIR испытан БПЛА Embler. Корпус –
С жестким крылом:
В Великобритании фирмой AESIR испытан БПЛА Embler. Корпус –
С жестким крылом:
Также компания AESIR объявила о построении крупного БПЛА Hoder.
С жестким крылом:
Также компания AESIR объявила о построении крупного БПЛА Hoder.

С гибким крылом:
Это дешевые и экономичные ЛА, в которых используется не
С гибким крылом:
Это дешевые и экономичные ЛА, в которых используется не
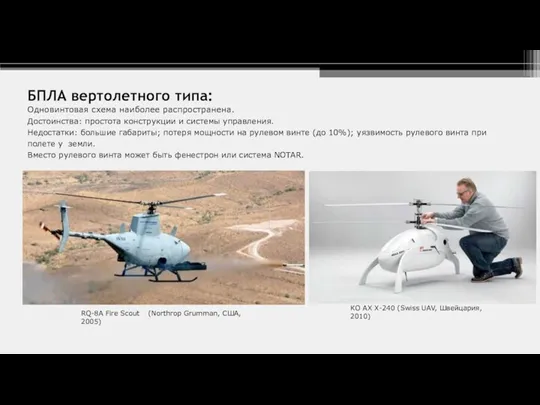
БПЛА вертолетного типа:
Одновинтовая схема наиболее распространена.
Достоинства: простота конструкции и системы управления.
Недостатки:
БПЛА вертолетного типа:
Одновинтовая схема наиболее распространена.
Достоинства: простота конструкции и системы управления.
Недостатки:
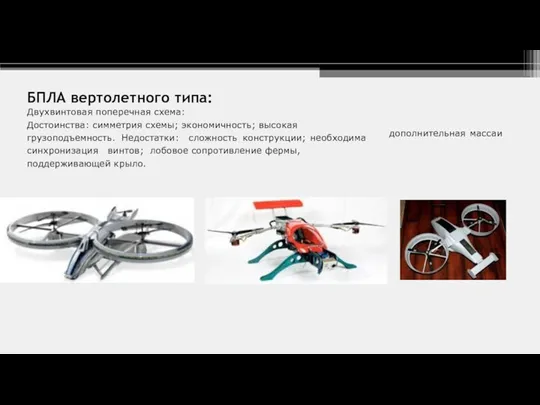
БПЛА вертолетного типа:
дополнительная масса и
Двухвинтовая поперечная схема:
Достоинства: симметрия схемы; экономичность; высокая грузоподъемность. Недостатки: сложность конструкции; необходима синхронизация винтов;
БПЛА вертолетного типа:
дополнительная масса и
Двухвинтовая поперечная схема:
Достоинства: симметрия схемы; экономичность; высокая грузоподъемность. Недостатки: сложность конструкции; необходима синхронизация винтов;
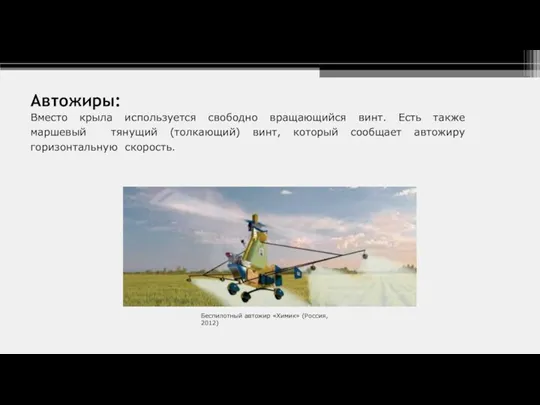
Автожиры:
Вместо крыла используется свободно вращающийся винт. Есть также маршевый тянущий (толкающий)
Автожиры:
Вместо крыла используется свободно вращающийся винт. Есть также маршевый тянущий (толкающий)

Конвертопланы:
ЛА с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие.
Smart с поворотными винтами типа Tiltrotor
Конвертопланы:
ЛА с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие.
Smart с поворотными винтами типа Tiltrotor

Мультикоптеры:
Имеют больше двух несущих винтов.
Трикоптер обычно движется двумя винтами вперед, а
Мультикоптеры:
Имеют больше двух несущих винтов.
Трикоптер обычно движется двумя винтами вперед, а
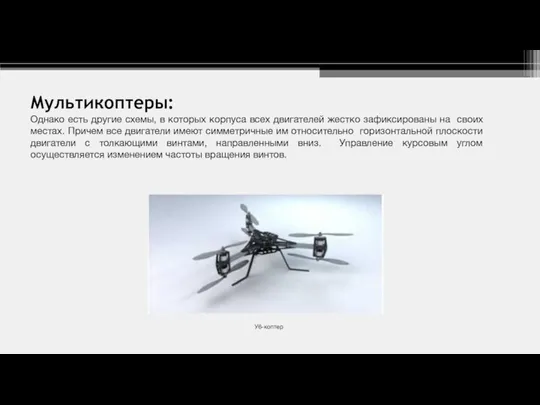
Мультикоптеры:
Однако есть другие схемы, в которых корпуса всех двигателей жестко зафиксированы
Мультикоптеры:
Однако есть другие схемы, в которых корпуса всех двигателей жестко зафиксированы
Мультикоптеры:
Квадрокоптер ‒ самая распространенная среди мультикоптеров схема. Четыре жестко зафиксированных ротора
Мультикоптеры:
Квадрокоптер ‒ самая распространенная среди мультикоптеров схема. Четыре жестко зафиксированных ротора
Мультикоптеры:
Существуют две схемы управления: схема «+» и схема «х».
В схеме «+»один
Мультикоптеры:
Существуют две схемы управления: схема «+» и схема «х».
В схеме «+»один
Мультикоптеры:
Существуют две схемы управления: схема «+» и схема «х».
Управление частотами вращения
Мультикоптеры:
Существуют две схемы управления: схема «+» и схема «х».
Управление частотами вращения
Мультикоптеры:
Принцип движения квадрокоптера схемы «х»:
Одна пара винтов вращается по часовой стрелке,
Мультикоптеры:
Принцип движения квадрокоптера схемы «х»:
Одна пара винтов вращается по часовой стрелке,

Мультикоптеры:
Оборудование квадрокоптера:
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного
Мультикоптеры:
Оборудование квадрокоптера:
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного

Мультикоптеры:
Основное назначение мультикоптеров – это фото- и видеосъемка, поэтому их обычно
Мультикоптеры:
Основное назначение мультикоптеров – это фото- и видеосъемка, поэтому их обычно

Мультикоптеры:
Гексакоптеры и октокоптеры имеют соответственно по 6 и 8 роторов, обладают
Мультикоптеры:
Гексакоптеры и октокоптеры имеют соответственно по 6 и 8 роторов, обладают
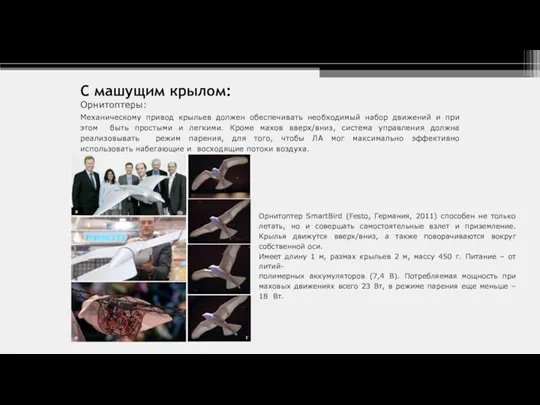
С машущим крылом:
Орнитоптеры:
Механическому привод крыльев должен обеспечивать необходимый набор движений и
С машущим крылом:
Орнитоптеры:
Механическому привод крыльев должен обеспечивать необходимый набор движений и
С машущим крылом:
чем двукрылые, и
Энтомоптеры:
Подразделяются на имитаторы 4-хкрылых и 2-хкрылых насекомых.
4-хкрылые (стрекозы, бабочки) совершают более сложные движения, маневренность у
С машущим крылом:
чем двукрылые, и
Энтомоптеры:
Подразделяются на имитаторы 4-хкрылых и 2-хкрылых насекомых.
4-хкрылые (стрекозы, бабочки) совершают более сложные движения, маневренность у
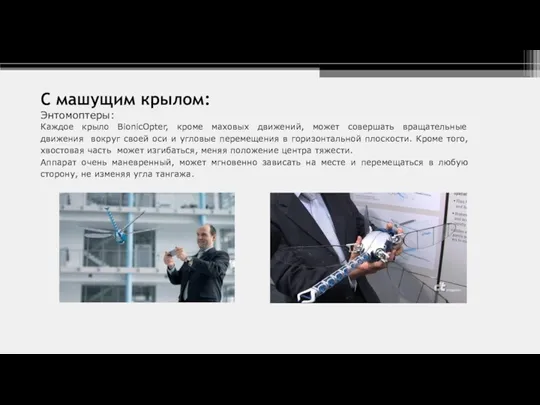
С машущим крылом:
Энтомоптеры:
Каждое крыло BionicOpter, кроме маховых движений, может совершать вращательные
С машущим крылом:
Энтомоптеры:
Каждое крыло BionicOpter, кроме маховых движений, может совершать вращательные
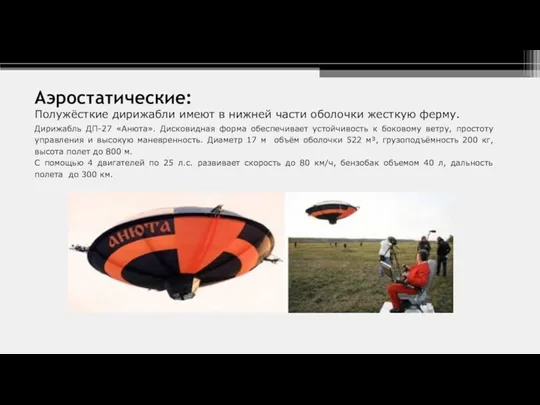
Аэростатические:
Полужёсткие дирижабли имеют в нижней части оболочки жесткую ферму.
Дирижабль ДП-27 «Анюта».
Аэростатические:
Полужёсткие дирижабли имеют в нижней части оболочки жесткую ферму.
Дирижабль ДП-27 «Анюта».
Гибридные:
Проект БАРС - гибрид дирижабля, самолета, вертолета и судна на воздушной
Гибридные:
Проект БАРС - гибрид дирижабля, самолета, вертолета и судна на воздушной
Гибридные:
Гибрид дирижабля и дельтаплана (Nimbus, Италия, 2013).
Достоинства: легкость, экономичность, способность летать
Гибридные:
Гибрид дирижабля и дельтаплана (Nimbus, Италия, 2013).
Достоинства: легкость, экономичность, способность летать
Гибридные:
Р-791 – гибрид самолета и дирижабля (Lockheed Martin, США, 2010). Разрабатывается
Гибридные:
Р-791 – гибрид самолета и дирижабля (Lockheed Martin, США, 2010). Разрабатывается
Области применения
Области применения
Прикладные:
Военные: наблюдательные разведывательные ударные
разведывательно-ударные бомбардировочные
истребительные (для уничтожения воздушных целей)
радиотрансляционные РЭБ
транспортные
БПЛА-мишени многоцелевые
Прикладные:
Военные: наблюдательные разведывательные ударные
разведывательно-ударные бомбардировочные
истребительные (для уничтожения воздушных целей)
радиотрансляционные РЭБ
транспортные
БПЛА-мишени многоцелевые
Прикладные:
Гражданские – разделены на 5 групп:
1. Мониторинг и подобные задачи: видеонаблюдение
Прикладные:
Гражданские – разделены на 5 групп:
1. Мониторинг и подобные задачи: видеонаблюдение
Прикладные:
1. Презентации, реклама, развлечения, творчество:
видео- и фотосъемка объектов архитектуры, природы, бизнеса,
Прикладные:
1. Презентации, реклама, развлечения, творчество:
видео- и фотосъемка объектов архитектуры, природы, бизнеса,
Прикладные:
1. Доставка грузов и подобные задачи:
доставка почты;
доставка инструмента, комплектующих и материалов
Прикладные:
1. Доставка грузов и подобные задачи:
доставка почты;
доставка инструмента, комплектующих и материалов
Прикладные:
Ретрансляция сигналов и подобные задачи:
ретрансляция радиосигналов с целью увеличения дальности действия
Прикладные:
Ретрансляция сигналов и подобные задачи:
ретрансляция радиосигналов с целью увеличения дальности действия
 Реальное и виртуальное в философии
Реальное и виртуальное в философии cb42fe644f33b9eb
cb42fe644f33b9eb Внутриутробные инфекции
Внутриутробные инфекции Отложенный перенос эмбрионов – новые перспективы
Отложенный перенос эмбрионов – новые перспективы Знакомство дошкольников с дорожными знаками.
Знакомство дошкольников с дорожными знаками.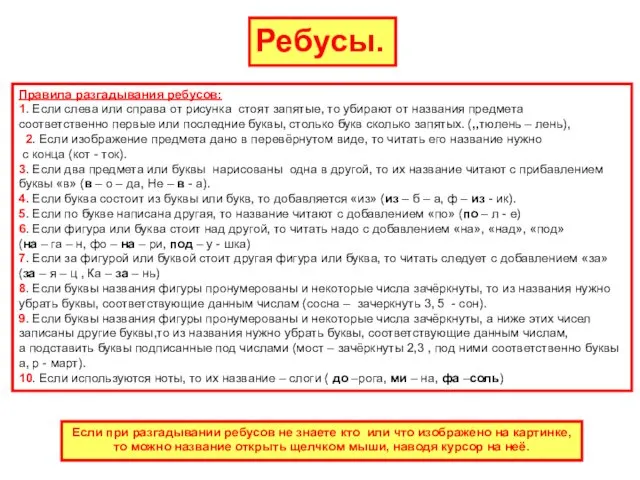 Ребусы
Ребусы 0e0c7fd201832f92
0e0c7fd201832f92 Организация работы по предупреждению детского дорожно-транспортного травматизма в средней группе
Организация работы по предупреждению детского дорожно-транспортного травматизма в средней группе Презентация Особенности организации внеурочной деятельности при работе с детьми с повышенной мотивацией
Презентация Особенности организации внеурочной деятельности при работе с детьми с повышенной мотивацией Семиотический методологический подход к коммуникации
Семиотический методологический подход к коммуникации Природное и общественное в человеке. Теории происхождения человека
Природное и общественное в человеке. Теории происхождения человека дидактическая играМой город
дидактическая играМой город Реализация и мониторинг внеурочной деятельности (презентация)
Реализация и мониторинг внеурочной деятельности (презентация)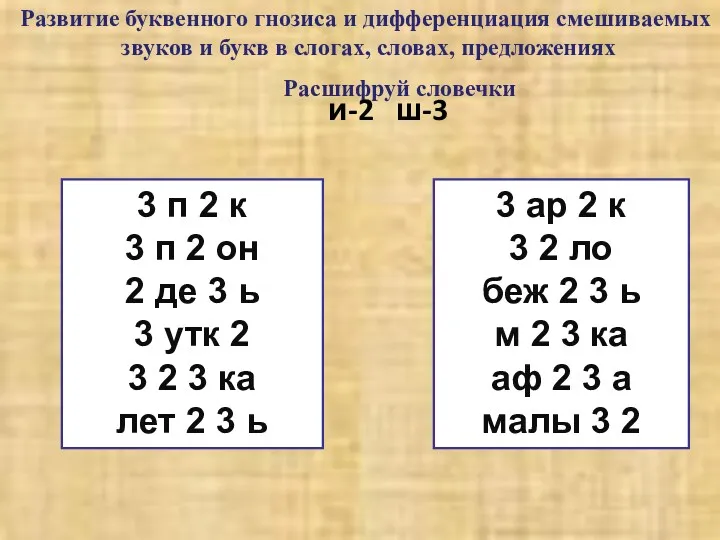 Презентация к ЦОР. Тема:Развитие буквенного гнозиса и дифференциация смешиваемых звуков и букв в слогах, словах.
Презентация к ЦОР. Тема:Развитие буквенного гнозиса и дифференциация смешиваемых звуков и букв в слогах, словах. Тепловые явления. Методы вычисления количества выделенной или поглощенной теплоты
Тепловые явления. Методы вычисления количества выделенной или поглощенной теплоты Правоохранительные органы Российской Федерации
Правоохранительные органы Российской Федерации Приёмы сжатия текста
Приёмы сжатия текста Отын энергетикалық кешен. Кешеннің ерекшелігі мен маңызы. Мұнай және газ өнеркәсібі. Көмір өнеркәсібі. Электр қуаты
Отын энергетикалық кешен. Кешеннің ерекшелігі мен маңызы. Мұнай және газ өнеркәсібі. Көмір өнеркәсібі. Электр қуаты Презентация Периодическая система химических элементов Д.И. Менделеева
Презентация Периодическая система химических элементов Д.И. Менделеева ИМИДЖ УЧИТЕЛЯ. Диск
ИМИДЖ УЧИТЕЛЯ. Диск Что такое световозвращатели. Для школ
Что такое световозвращатели. Для школ Основная документация педагога-психолога ДОУ
Основная документация педагога-психолога ДОУ Екологічне виховання молодших школярів на уроках природознавства та української мови
Екологічне виховання молодших школярів на уроках природознавства та української мови Топонимика и микротопонимика городского округа города Шахунья
Топонимика и микротопонимика городского округа города Шахунья Научные революции в естествознании и формирование научной картины мира
Научные революции в естествознании и формирование научной картины мира Система счисления древней Руси
Система счисления древней Руси Атлас педагогических идей
Атлас педагогических идей Методы решения иррациональных уравнений
Методы решения иррациональных уравнений