- Интерфейс связи CAN

Содержание
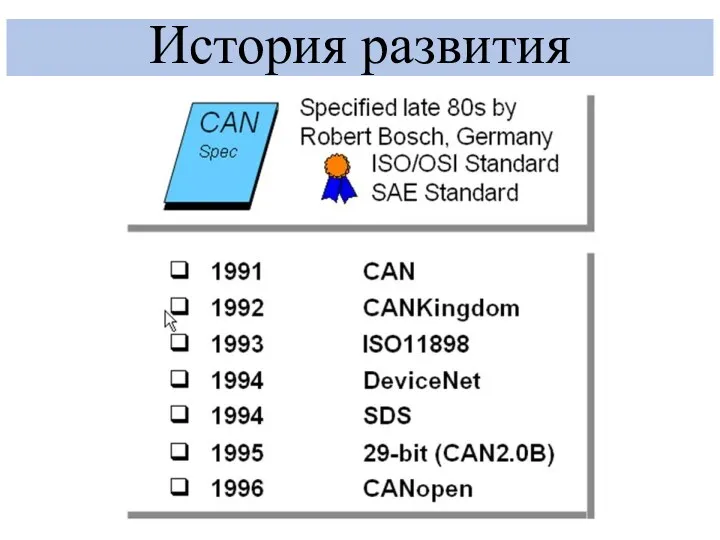
- 2. История развития
- 3. CAN-интерфейс CAN-протокол был разработан фирмой Robert Bosch GmbН для использования в автомобильной электронике, отличается повышенной помехоустойчивостью,
- 4. CAN-интерфейс СAN-протокол распространяется на следующие уровни: Физический уровень определяет, как именно будут передаваться сигналы, их электрические
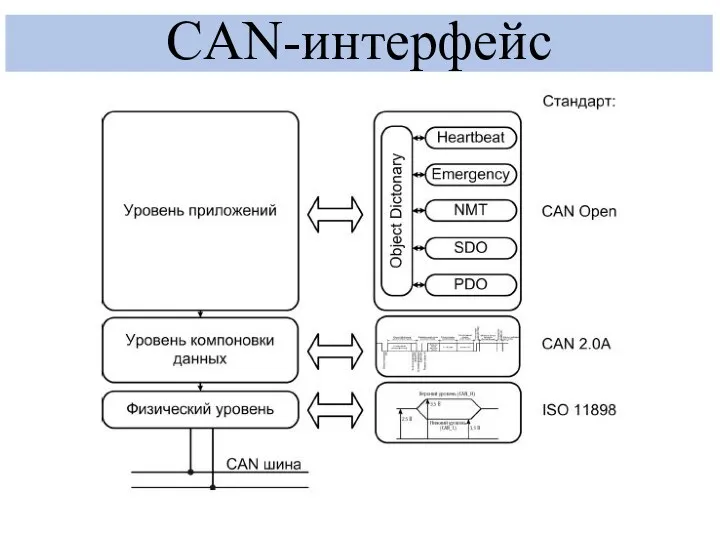
- 5. CAN-интерфейс
- 6. Физический уровень
- 7. Физический уровень Дифференциальное включение приемопередатчиков обеспечивает подавление синфазной помехи. Уровень сигналов составляет 1/3 от значения напряжения
- 8. Скорость / Длина Шины Физический уровень
- 9. Физический уровень
- 10. Физический уровень Возможность применения гальванической развязки, причем гальваническая развязка может устанавливаться либо между приемопередающим буфером и
- 11. Типы фреймов в CAN-протоколе В CAN протоколе определены следующие типы фреймов: фрейм данных перемещает данные с
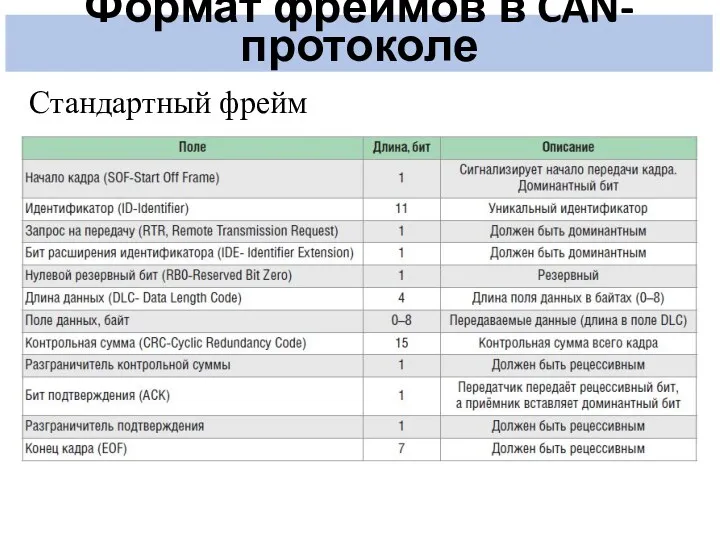
- 12. Формат фреймов в CAN-протоколе Стандартный фрейм
- 13. Формат фреймов в CAN-протоколе Стандартный фрейм
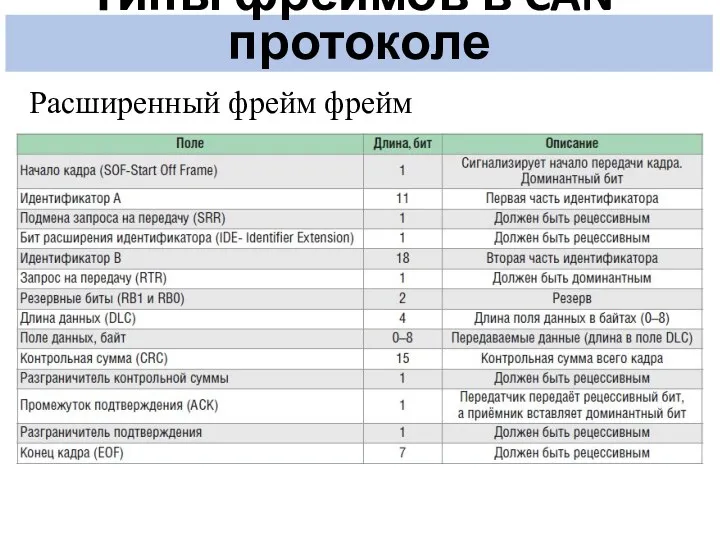
- 14. Типы фреймов в CAN-протоколе Расширенный фрейм фрейм
- 15. Формат фреймов в CAN-протоколе Расширенный фрейм
- 16. Поле SOF (Start of Frame) находится в начале фрейма данных и удаленного фрейма и содержит один
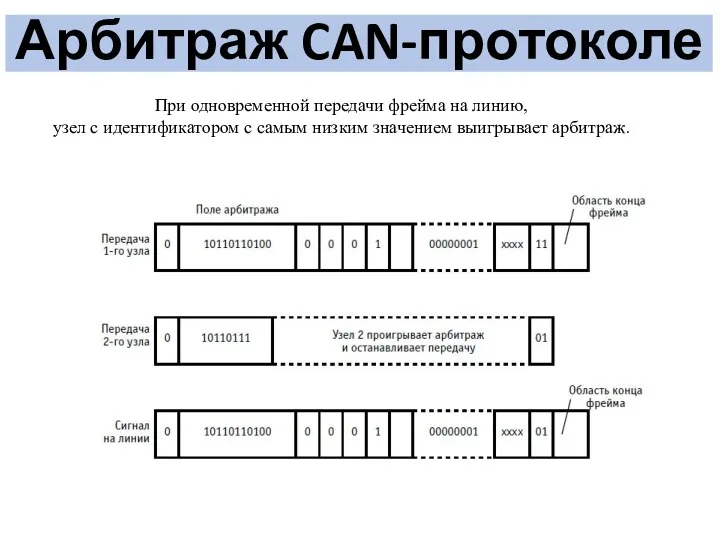
- 17. Арбитраж CAN-протоколе При одновременной передачи фрейма на линию, узел с идентификатором с самым низким значением выигрывает
- 18. Ошибки в CAN-протоколе CANпротокол обеспечивает механизмы обнаружения следующих типов ошибок: Разрядная ошибка Ошибка подтверждения Ошибка заполнения
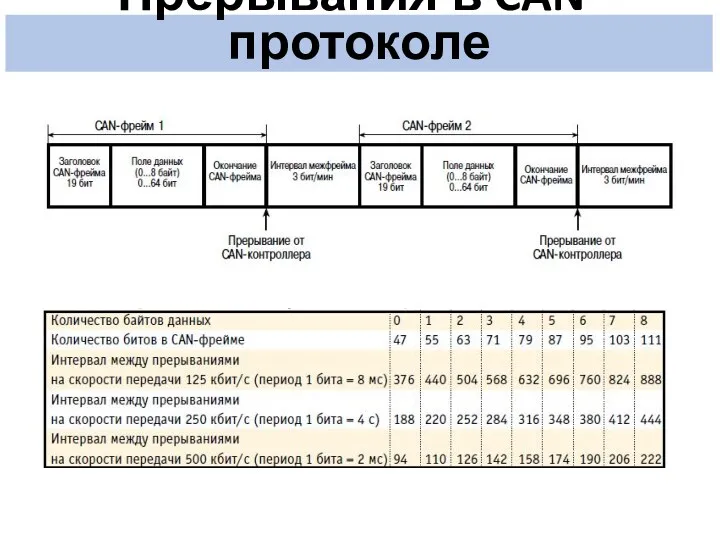
- 19. Прерывания в CAN-протоколе
- 20. Протокол CANopen
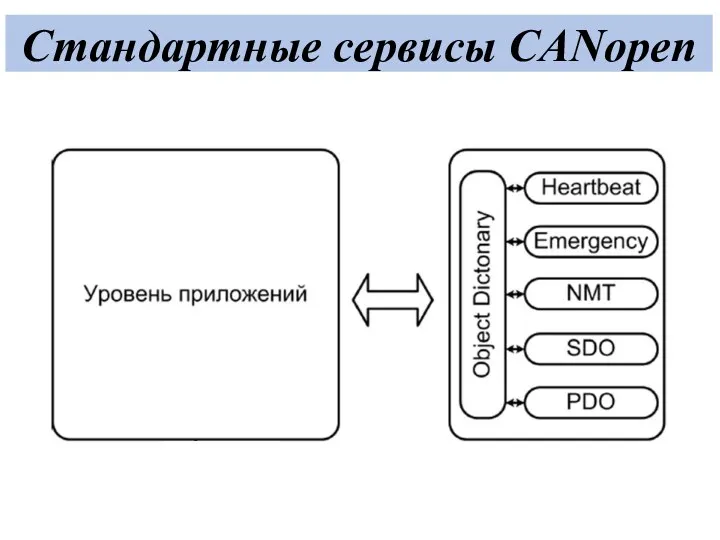
- 21. Стандартные сервисы CANopen
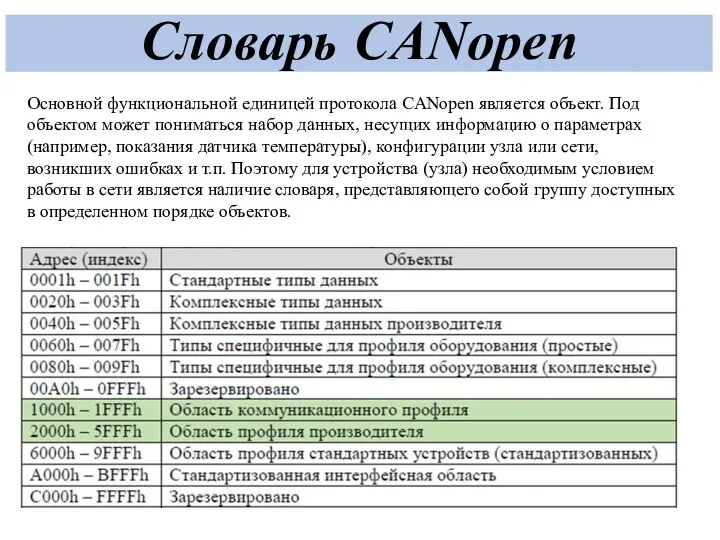
- 22. Словарь CANopen Основной функциональной единицей протокола CANopen является объект. Под объектом может пониматься набор данных, несущих
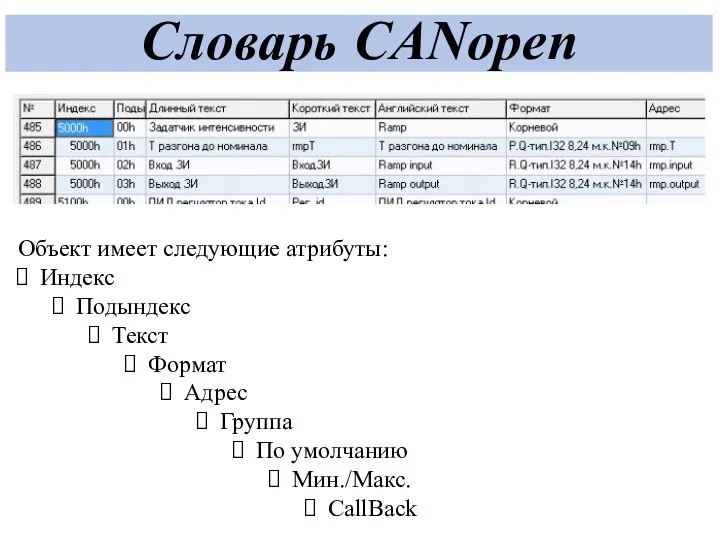
- 23. Словарь CANopen Объект имеет следующие атрибуты: Индекс Подындекс Текст Формат Адрес Группа По умолчанию Мин./Макс. CallBack
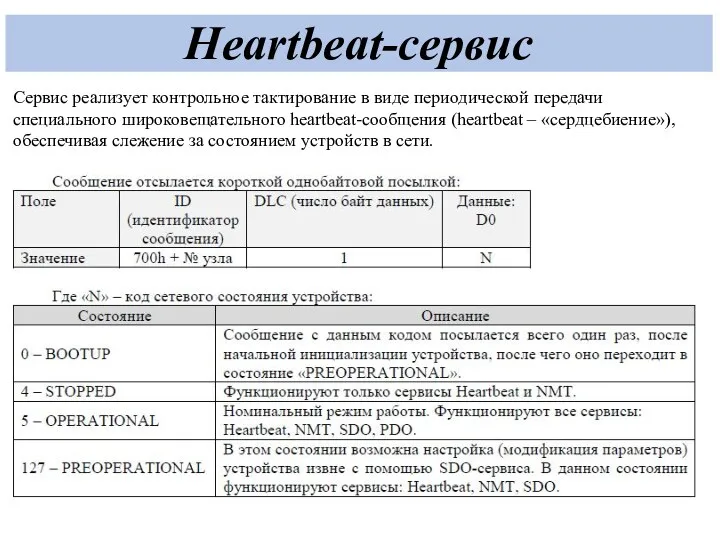
- 24. Heartbeat-сервис Сервис реализует контрольное тактирование в виде периодической передачи специального широковещательного heartbeat-сообщения (heartbeat – «сердцебиение»), обеспечивая
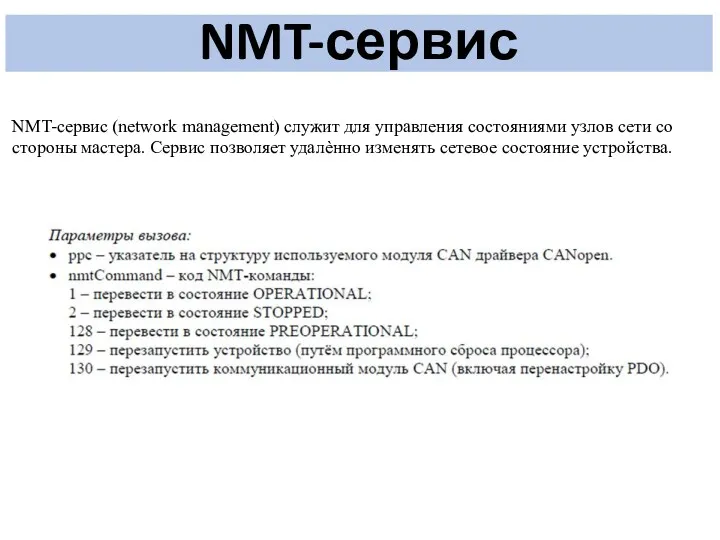
- 25. NMT-сервис NMT-сервис (network management) служит для управления состояниями узлов сети со стороны мастера. Сервис позволяет удалѐнно
- 27. Скачать презентацию
История развития
История развития
CAN-интерфейс
CAN-протокол был разработан фирмой Robert Bosch GmbН для использования в автомобильной электронике, отличается
CAN-интерфейс
CAN-протокол был разработан фирмой Robert Bosch GmbН для использования в автомобильной электронике, отличается
CAN-интерфейс
СAN-протокол распространяется на следующие уровни:
Физический уровень определяет, как именно будут передаваться сигналы, их
CAN-интерфейс
СAN-протокол распространяется на следующие уровни:
Физический уровень определяет, как именно будут передаваться сигналы, их
CAN-интерфейс
CAN-интерфейс
Физический уровень
Физический уровень

Физический уровень
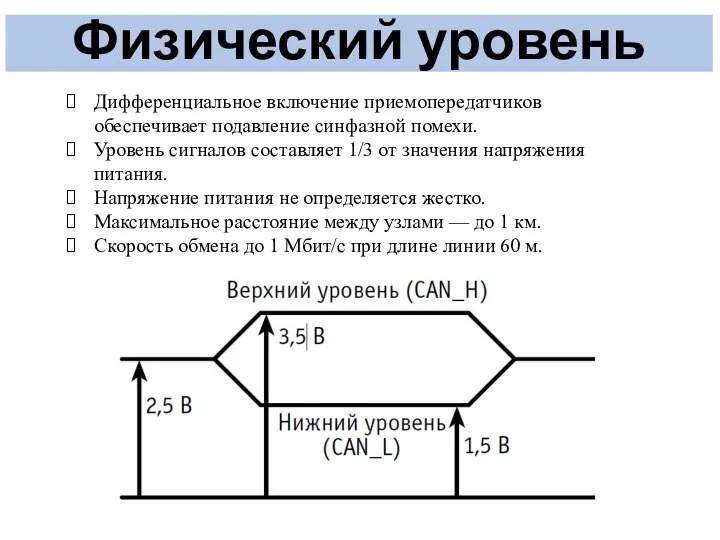
Дифференциальное включение приемопередатчиков обеспечивает подавление синфазной помехи.
Уровень сигналов составляет 1/3 от
Физический уровень
Дифференциальное включение приемопередатчиков обеспечивает подавление синфазной помехи.
Уровень сигналов составляет 1/3 от
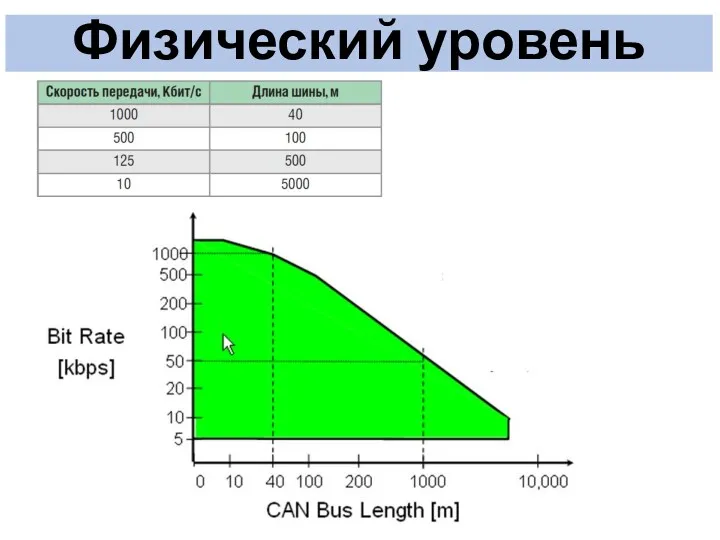
Скорость / Длина Шины
Физический уровень
Скорость / Длина Шины
Физический уровень
Физический уровень
Физический уровень

Физический уровень
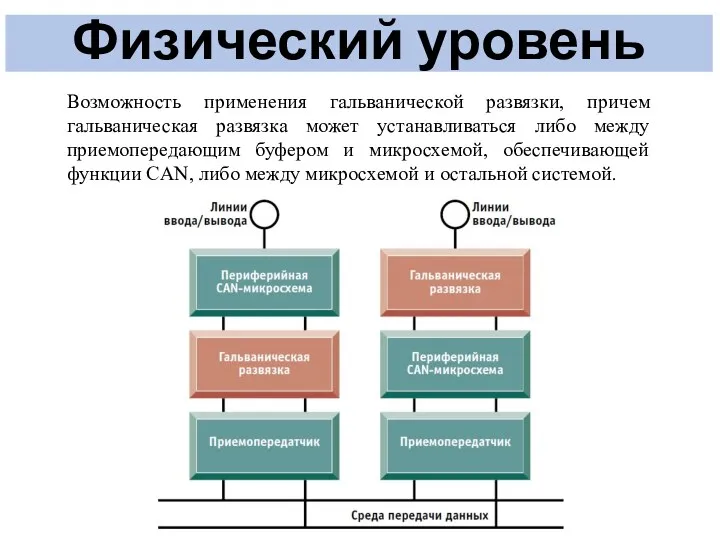
Возможность применения гальванической развязки, причем гальваническая развязка может устанавливаться либо между приемопередающим
Физический уровень
Возможность применения гальванической развязки, причем гальваническая развязка может устанавливаться либо между приемопередающим
Типы фреймов в CAN-протоколе
В CAN протоколе определены следующие типы фреймов:
фрейм данных перемещает данные
Типы фреймов в CAN-протоколе
В CAN протоколе определены следующие типы фреймов:
фрейм данных перемещает данные
Формат фреймов в CAN-протоколе
Стандартный фрейм
Формат фреймов в CAN-протоколе
Стандартный фрейм
Формат фреймов в CAN-протоколе
Стандартный фрейм
Формат фреймов в CAN-протоколе
Стандартный фрейм

Типы фреймов в CAN-протоколе
Расширенный фрейм фрейм
Типы фреймов в CAN-протоколе
Расширенный фрейм фрейм
Формат фреймов в CAN-протоколе
Расширенный фрейм
Формат фреймов в CAN-протоколе
Расширенный фрейм

Поле SOF (Start of Frame) находится в начале фрейма данных и удаленного фрейма
Поле SOF (Start of Frame) находится в начале фрейма данных и удаленного фрейма
Арбитраж CAN-протоколе
При одновременной передачи фрейма на линию,
узел с идентификатором с самым низким значением
Арбитраж CAN-протоколе
При одновременной передачи фрейма на линию,
узел с идентификатором с самым низким значением
Ошибки в CAN-протоколе
CANпротокол обеспечивает механизмы обнаружения следующих типов ошибок:
Разрядная ошибка
Ошибка подтверждения
Ошибка заполнения
CRCошибка
Ошибка формы
Ошибки в CAN-протоколе
CANпротокол обеспечивает механизмы обнаружения следующих типов ошибок:
Разрядная ошибка
Ошибка подтверждения
Ошибка заполнения
CRCошибка
Ошибка формы
Прерывания в CAN-протоколе
Прерывания в CAN-протоколе
Протокол CANopen
Протокол CANopen
Стандартные сервисы CANopen
Стандартные сервисы CANopen
Словарь CANopen
Основной функциональной единицей протокола CANopen является объект. Под объектом может пониматься набор
Словарь CANopen
Основной функциональной единицей протокола CANopen является объект. Под объектом может пониматься набор
Словарь CANopen
Объект имеет следующие атрибуты:
Индекс
Подындекс
Текст
Формат
Адрес
Группа
По умолчанию
Мин./Макс.
CallBack
Словарь CANopen
Объект имеет следующие атрибуты:
Индекс
Подындекс
Текст
Формат
Адрес
Группа
По умолчанию
Мин./Макс.
CallBack
Heartbeat-сервис
Сервис реализует контрольное тактирование в виде периодической передачи специального широковещательного heartbeat-сообщения (heartbeat
Heartbeat-сервис
Сервис реализует контрольное тактирование в виде периодической передачи специального широковещательного heartbeat-сообщения (heartbeat
NMT-сервис
NMT-сервис (network management) служит для управления состояниями узлов сети со стороны мастера.
NMT-сервис
NMT-сервис (network management) служит для управления состояниями узлов сети со стороны мастера.
 Биологический турнир
Биологический турнир Русская изба
Русская изба Николай Николаевич Ге (1831 – 1894)
Николай Николаевич Ге (1831 – 1894) Дожимная насосная станция для сбора нефти, газа и воды на нефтяных месторождениях
Дожимная насосная станция для сбора нефти, газа и воды на нефтяных месторождениях Мужское здоровье. Бесплодие
Мужское здоровье. Бесплодие Школа Лидеров
Школа Лидеров Зачем нужны выборы
Зачем нужны выборы Классный час День неизвестного солдата
Классный час День неизвестного солдата Региональные особенности и инновационная практика зарубежных нефтедобывающих компаний
Региональные особенности и инновационная практика зарубежных нефтедобывающих компаний Завершальний етап ліквідації поліомієліту. Перехід до бОПВ
Завершальний етап ліквідації поліомієліту. Перехід до бОПВ Развитие речи у детей с ранним детским аутизмом (РДА)
Развитие речи у детей с ранним детским аутизмом (РДА) Экскурсия в усадьбу Деда Мороза
Экскурсия в усадьбу Деда Мороза raskar Mocap
raskar Mocap Продукт: трубы и стержни
Продукт: трубы и стержни Акустический гнозис. Сенсорные и гностические слуховые расстройства. Исследование слухового гнозиса
Акустический гнозис. Сенсорные и гностические слуховые расстройства. Исследование слухового гнозиса Дослідження складу шламів гальванічних виробництв та розробка методу утилізації їх у виробництві склоподібних виробів
Дослідження складу шламів гальванічних виробництв та розробка методу утилізації їх у виробництві склоподібних виробів Стихотворение Пушкина Анчар. Размер, рифма, тема, идея, художественные средства
Стихотворение Пушкина Анчар. Размер, рифма, тема, идея, художественные средства My future profession veterinarian
My future profession veterinarian Изготовление кухонной доски в стиле пирографии
Изготовление кухонной доски в стиле пирографии Моделирование юбки
Моделирование юбки Классификация фундаментов. Основные дефекты фундаментов
Классификация фундаментов. Основные дефекты фундаментов Проектная деятельность в начальной школе.
Проектная деятельность в начальной школе. Занятие по внеурочной деятельности в 1 классе Красивые зубы - красивая улыбка
Занятие по внеурочной деятельности в 1 классе Красивые зубы - красивая улыбка Викторина по сказке Г.Х.Андерсена Оле-лукойе
Викторина по сказке Г.Х.Андерсена Оле-лукойе Информация о стажировке. Компания Halliburton
Информация о стажировке. Компания Halliburton Гигиенические требования к условиям и организации учебы и воспитания, оздоровлению отдельных групп детского населения
Гигиенические требования к условиям и организации учебы и воспитания, оздоровлению отдельных групп детского населения Підрахунок запасів газу об’ємним методом на Кобзівському ГКР
Підрахунок запасів газу об’ємним методом на Кобзівському ГКР Силікатна промисловість
Силікатна промисловість