- Использование датчиков в RobotC

Содержание
- 2. Сенсоры или датчики настраиваются в среде RobotC так же, как и двигатели. Обратите внимание на то,
- 3. a = SensorValue[in4]; /* Переменной “а” присвоено значение, записанное микроконтроллером VEX в элемент массива “SensorValue” с
- 4. Подключение и работа с ультразвуковым датчиком
- 5. Ультразвуковой датчик является дальномером, измеряющим расстояние до объектов с помощью отраженного от поверхности объекта ультразвукового сигнала.
- 6. * Ультразвуковой дальномер, определяет расстояние до препятствия за счет вычисления времени полета звуковой волны с момента
- 7. Процесс работы датчика делится на несколько этапов: Датчик отправляет звуковую волну и начинает отсчет времени После
- 8. Подключение ультразвукового датчика
- 9. Подключение ультразвукового датчика расстояния к программируемому контроллеру выполняется с помощью двух 2-пиновых коннекторов: INPUT и OUTPUT.
- 10. Напишем программу для ультразвукового датчика расстояния. Условие: До тех пор пока расстояние до препятствия больше 250
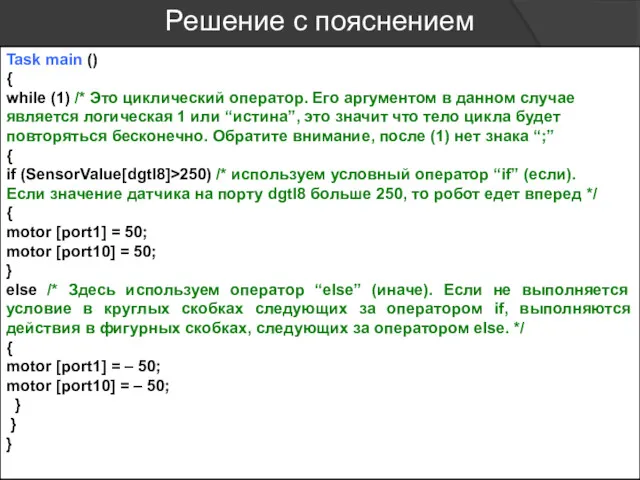
- 11. Task main () { while (1) { if (SensorValue[dgtl8]>250) { motor [port1] = 50; motor [port10]
- 12. Task main () { while (1) /* Это циклический оператор. Его аргументом в данном случае является
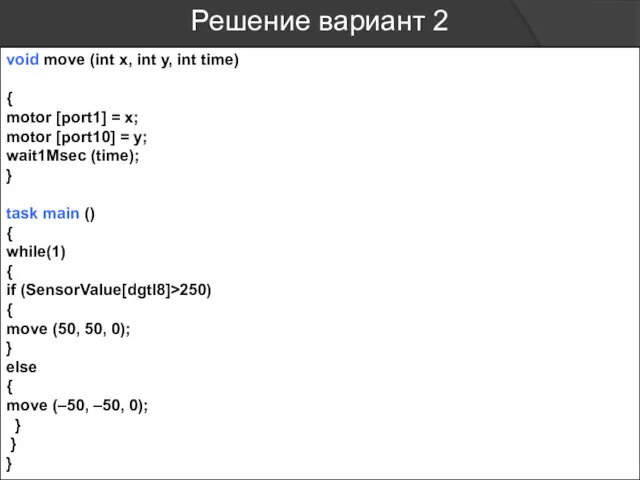
- 13. void move (int x, int y, int time) { motor [port1] = x; motor [port10] =
- 15. Скачать презентацию
Сенсоры или датчики настраиваются в среде RobotC так же, как и
Сенсоры или датчики настраиваются в среде RobotC так же, как и
![a = SensorValue[in4]; /* Переменной “а” присвоено значение, записанное микроконтроллером](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/135307/slide-2.jpg)
a = SensorValue[in4];
/* Переменной “а” присвоено значение, записанное микроконтроллером VEX
a = SensorValue[in4];
/* Переменной “а” присвоено значение, записанное микроконтроллером VEX

Подключение и работа с ультразвуковым датчиком
Подключение и работа с ультразвуковым датчиком
Ультразвуковой датчик является дальномером, измеряющим расстояние до объектов с помощью отраженного
Ультразвуковой датчик является дальномером, измеряющим расстояние до объектов с помощью отраженного
* Ультразвуковой дальномер, определяет расстояние до препятствия за счет вычисления времени
* Ультразвуковой дальномер, определяет расстояние до препятствия за счет вычисления времени

Процесс работы датчика делится на несколько этапов:
Датчик отправляет звуковую волну и
Процесс работы датчика делится на несколько этапов:
Датчик отправляет звуковую волну и

Подключение ультразвукового датчика
Подключение ультразвукового датчика
Подключение ультразвукового датчика расстояния к программируемому контроллеру выполняется с помощью двух
Подключение ультразвукового датчика расстояния к программируемому контроллеру выполняется с помощью двух
Напишем программу для ультразвукового датчика расстояния.
Условие: До тех пор пока
Напишем программу для ультразвукового датчика расстояния.
Условие: До тех пор пока
![Task main () { while (1) { if (SensorValue[dgtl8]>250) {](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/135307/slide-10.jpg)
Task main ()
{
while (1)
{
if (SensorValue[dgtl8]>250)
{
motor [port1] = 50;
motor [port10]
Task main ()
{
while (1)
{
if (SensorValue[dgtl8]>250)
{
motor [port1] = 50;
motor [port10]
Task main ()
{
while (1) /* Это циклический оператор. Его аргументом в
Task main ()
{
while (1) /* Это циклический оператор. Его аргументом в
void move (int x, int y, int time)
{
motor [port1] =
void move (int x, int y, int time)
{
motor [port1] =
 Русские ученые – лингвисты, внесшие вклад в изучение русского языка. 7 класс
Русские ученые – лингвисты, внесшие вклад в изучение русского языка. 7 класс Пищеварение в желудке. Пищеварительные железы – печень, поджелудочная железа
Пищеварение в желудке. Пищеварительные железы – печень, поджелудочная железа Внутренняя изоляция высоковольтного электроэнергетического оборудования. (Лекция 8)
Внутренняя изоляция высоковольтного электроэнергетического оборудования. (Лекция 8) Углеводы
Углеводы Прямоугольный параллелепипед
Прямоугольный параллелепипед Методические рекомендации деятельности педагога дополнительного образования в межаттестационный период
Методические рекомендации деятельности педагога дополнительного образования в межаттестационный период Омонимы. 5 класс. Раздел лексика
Омонимы. 5 класс. Раздел лексика ПРЕЗЕНТАЦИЯ ЗАКРУЖИЛА ОСЕНЬ ЗОЛОТАЯ
ПРЕЗЕНТАЦИЯ ЗАКРУЖИЛА ОСЕНЬ ЗОЛОТАЯ Презентация к внеклассному мероприятию Изготовление поделки РАДУГА
Презентация к внеклассному мероприятию Изготовление поделки РАДУГА презентации по внеурочной деятельности ФГОС
презентации по внеурочной деятельности ФГОС Теоретические основы реструктуризации
Теоретические основы реструктуризации Психофизиологическая характеристика детей младшего школьного возраста
Психофизиологическая характеристика детей младшего школьного возраста Внешние эффекты экономического роста
Внешние эффекты экономического роста Пылающий адрес войны - Киров
Пылающий адрес войны - Киров Форова
Форова Из опыта работы руководителя объединений Судомодельный и Резьба по дереву в 2014-2015 учебном году.
Из опыта работы руководителя объединений Судомодельный и Резьба по дереву в 2014-2015 учебном году. Понятия и методы контроля технического состояния ствола скважины. Термометрия, ее сущность и области применения. Инклинометрия
Понятия и методы контроля технического состояния ствола скважины. Термометрия, ее сущность и области применения. Инклинометрия Басқару релелері, санды технологиялар және логикалық элементтер
Басқару релелері, санды технологиялар және логикалық элементтер Старший школьный (подростковый, пубертатный) период
Старший школьный (подростковый, пубертатный) период Конституция 1918
Конституция 1918 Влияние варяжских племен на историю края
Влияние варяжских племен на историю края Как написать достойную научную работу со школьником? Попытаемся разобраться
Как написать достойную научную работу со школьником? Попытаемся разобраться Презентация к логопедическому занятию Говори и пиши грамотно
Презентация к логопедическому занятию Говори и пиши грамотно Кроссворд Атмосфера 6 класс
Кроссворд Атмосфера 6 класс Противодействие легализации доходов, полученных преступным путем и финансированию терроризма
Противодействие легализации доходов, полученных преступным путем и финансированию терроризма General information about electrical networks
General information about electrical networks Классный час Помним о Беслане
Классный час Помним о Беслане Виробництво харчової продукції
Виробництво харчової продукції