- Из чего состоят роботы?

Содержание
- 2. Что такое «робот»? Робот - машина (точнее - "автомат"), поведение которой выглядит разумным. «Робот — это
- 3. Тогда стиральная машинка – тоже робот??
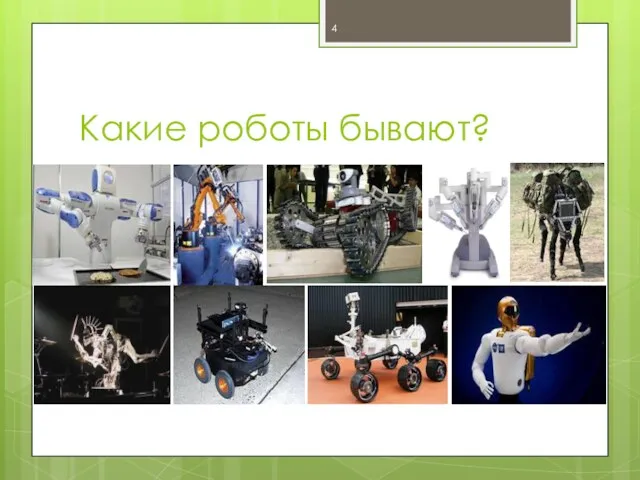
- 4. Какие роботы бывают?
- 5. И даже такими
- 6. Из чего состоят? В зависимости от конструкции робот может состоять из разных элементов, каждый из которых
- 7. Обычно робот состоит из следующих систем: информационно-измерительная (сенсорная) система управляющая система система связи с человеком или
- 8. Исполнительная система робота Исполнительная система определяет как робот движется (ползает, катится, летает) и какие действия может
- 9. Итак, конструкция есть, что видит робот? Например он сейчас в лабиринте
- 10. НЕА… на самом деле робот увидит это Да. Он ничего не видит. У него нет глаз.
- 11. Сенсорная система Все роботы должны воспринимать информацию об окружающем его мире. Как люди видят, слышат, ощущают
- 12. Обнаружение препятствий с помощью оптических сенсоров
- 13. Инфракрасный дальномер Sharp (10-80 см) Инфракрасный дальномер позволяет определять расстояние до объектов. Это модель GP2Y0A021 компании
- 14. Дальномеры Ультразвуковой датчик определяет расстояние до объекта так же, как это делают летучие мыши или дельфины.
- 15. Ультразвуковой дальномер HC-SR04 Датчик HC-SR04 генерирует узконаправленный сигнал на частоте 40 кГц и ловит отраженный сигнал
- 16. Датчики изгиба Датчики изгиба представляют собой пассивные элементы резистивного типа, сопротивление которых увеличивается при изгибе или
- 17. Тепловые датчики Наиболее известными тепловыми датчиками являются термисторы. Это устройство пассивного типа изменяет сопротивление пропорционально температуре.
- 18. Датчики давления Для измерения сил хорошо подходят датчики давления. «Чувствительный» элемент датчика расположен на специальной подложке
- 19. Датчики запаха Диапазон реакций на запахи человеческого носа в настоящее время недостижим ни одной из известных
- 20. Датчики влажности
- 21. Камера и компьютерное зрение робота
- 22. Возникает сложная задача программирования обработки изображений
- 23. Система управления роботом Система управления – это «мозг робота». Используя сигналы обратной связи от сенсорных устройств
- 24. Управление электричеством Управление вручную Автоматическое управление
- 25. Arduino — это электронный конструктор и удобная платформа быстрой разработки электронных устройств для новичков и профессионалов.
- 26. Arduino — это небольшая плата с собственным процессором и памятью. На плате также есть пара десятков
- 27. Принцип бутерброда Ещё одной отличительной особенностью Arduino является наличие плат расширения, так называемых shields или просто
- 28. Собираем схему на Arduino
- 29. Система взаимосвязи организует обмен информацией между роботом и человеком или другими роботами. Цель такого обмена —
- 30. Как управлять роботом??
- 31. Пульт управления роботом Кнопки (сенсорные, тактовые и т.п.) Джойстики Индикаторы (LCD-мониторы) Специальные датчики (акселерометр, гироскоп и
- 32. Кнопки на пульте располагают «с умом»: - группируют по функциям; - выделяют цветом и светом
- 33. Какие кнопки нужно обязательно предусматривать: кнопка включения/выключения кнопки выбора режимов работы Такие кнопки нужно обязательно выделять
- 34. Сенсорная кнопка #define ctsPin 2 // пин для емкостного датчика касания int ledPin = 13; //
- 35. Принцип действия сенсорной кнопки
- 36. По такому принципу и «фруктовая клавиатура» сделана http://pikabu.ru/story/modul_sensornyikh_knopok_dlya_arduino_na_chipe_mpr121_3841584
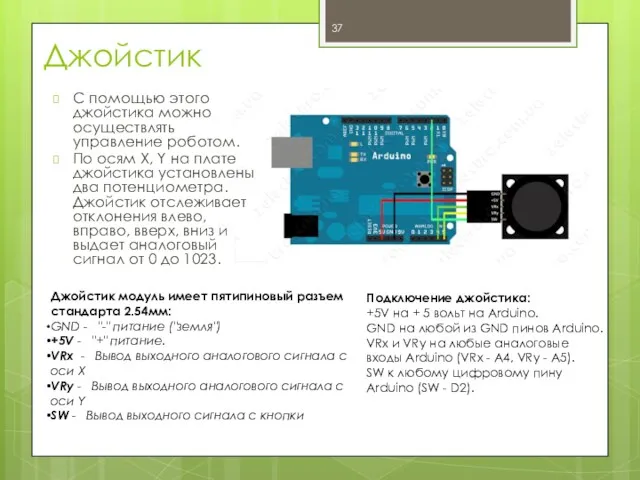
- 37. Джойстик С помощью этого джойстика можно осуществлять управление роботом. По осям X, Y на плате джойстика
- 38. Самостоятельные движения робота Значит и робота нужно научить познавать свое тело и управлять им.
- 39. Режим копирующего управления Следует также заметить, что режим копирующего управления даёт 8 - 10 кратный выигрыш
- 40. Это можно сделать при помощи специальных датчиков Акселерометр - определяет угол наклона устройства относительно поверхности Земли
- 41. Искусственный интеллект полностью автономные роботы с искусственным интеллектом ещё недостаточно умны, и в силу этого их
- 43. Скачать презентацию

Что такое «робот»?
Робот - машина (точнее - "автомат"), поведение которой выглядит
Что такое «робот»?
Робот - машина (точнее - "автомат"), поведение которой выглядит
Тогда стиральная машинка – тоже робот??
Тогда стиральная машинка – тоже робот??
Какие роботы бывают?
Какие роботы бывают?

И даже такими
И даже такими
Из чего состоят?
В зависимости от конструкции робот может состоять из разных
Из чего состоят?
В зависимости от конструкции робот может состоять из разных
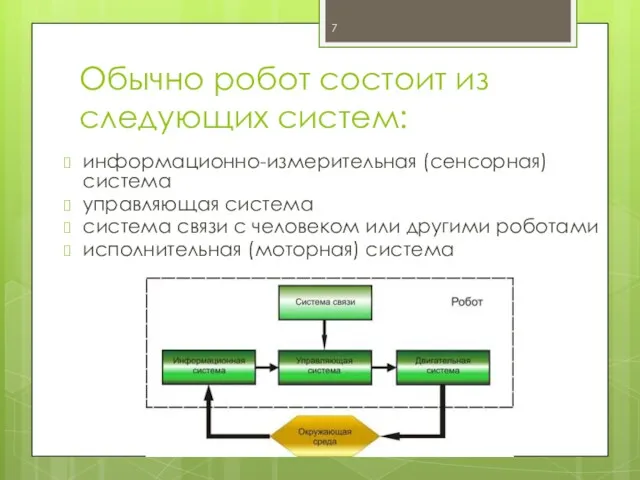
Обычно робот состоит из следующих систем:
информационно-измерительная (сенсорная) система
управляющая система
система связи с
Обычно робот состоит из следующих систем:
информационно-измерительная (сенсорная) система
управляющая система
система связи с

Исполнительная система робота
Исполнительная система определяет как робот движется (ползает, катится, летает)
Исполнительная система робота
Исполнительная система определяет как робот движется (ползает, катится, летает)
Итак, конструкция есть, что видит робот?
Например он сейчас в лабиринте
Итак, конструкция есть, что видит робот?
Например он сейчас в лабиринте
НЕА… на самом деле робот увидит это
Да. Он ничего не
НЕА… на самом деле робот увидит это
Да. Он ничего не
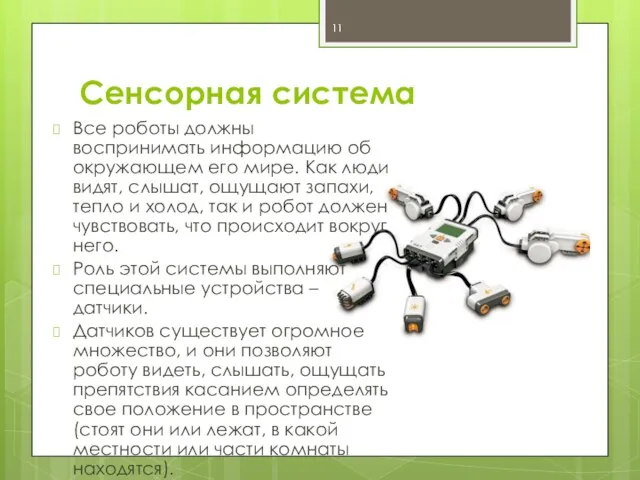
Сенсорная система
Все роботы должны воспринимать информацию об окружающем его мире.
Сенсорная система
Все роботы должны воспринимать информацию об окружающем его мире.
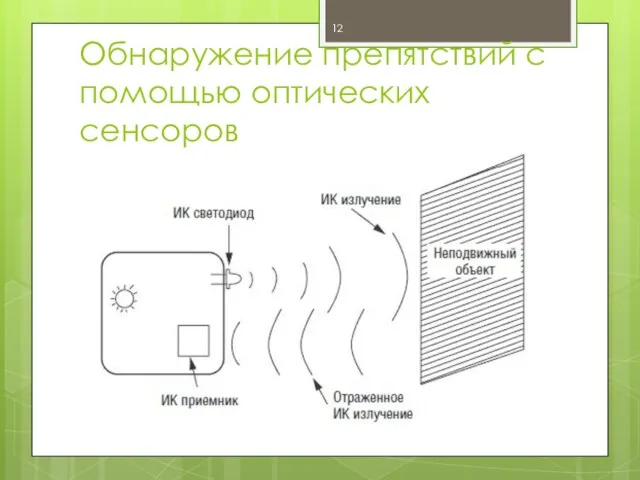
Обнаружение препятствий с помощью оптических сенсоров
Обнаружение препятствий с помощью оптических сенсоров
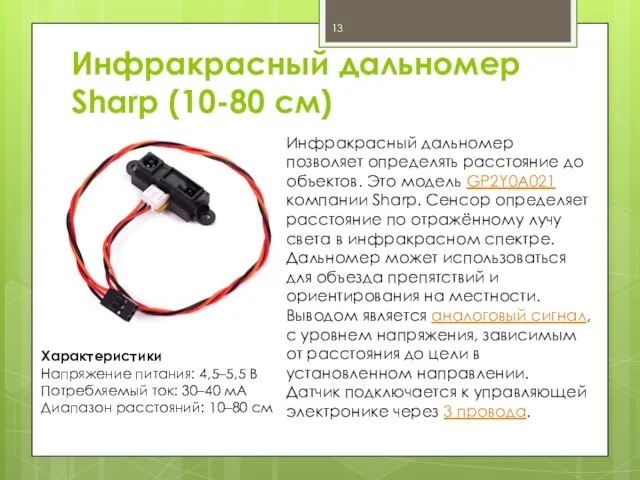
Инфракрасный дальномер Sharp (10-80 см)
Инфракрасный дальномер позволяет определять расстояние до объектов.
Инфракрасный дальномер Sharp (10-80 см)
Инфракрасный дальномер позволяет определять расстояние до объектов.
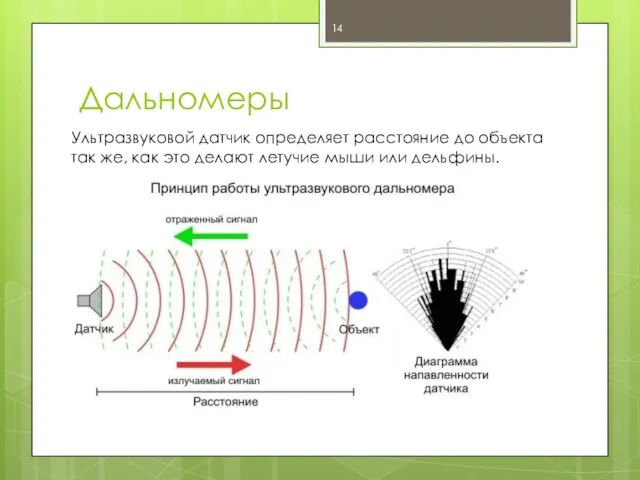
Дальномеры
Ультразвуковой датчик определяет расстояние до объекта так же, как это делают
Дальномеры
Ультразвуковой датчик определяет расстояние до объекта так же, как это делают
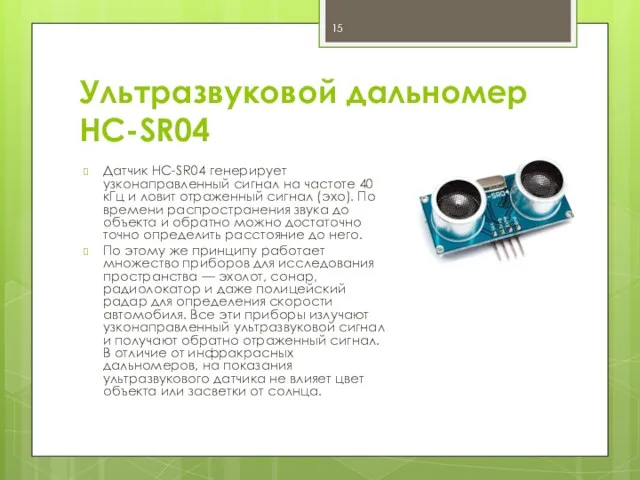
Ультразвуковой дальномер HC-SR04
Датчик HC-SR04 генерирует узконаправленный сигнал на частоте 40 кГц
Ультразвуковой дальномер HC-SR04
Датчик HC-SR04 генерирует узконаправленный сигнал на частоте 40 кГц
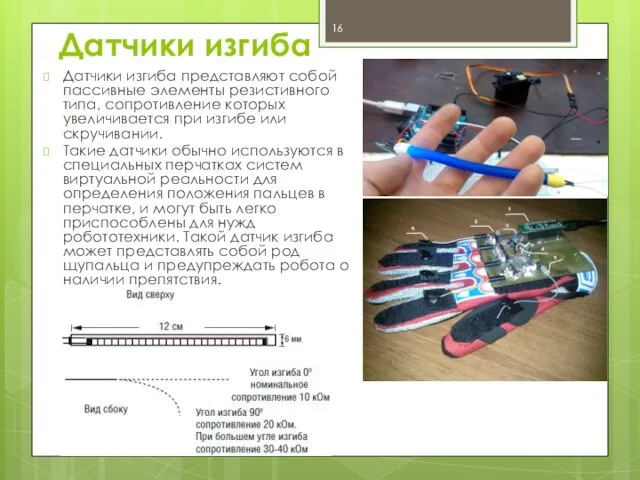
Датчики изгиба
Датчики изгиба представляют собой пассивные элементы резистивного типа, сопротивление которых
Датчики изгиба
Датчики изгиба представляют собой пассивные элементы резистивного типа, сопротивление которых

Тепловые датчики
Наиболее известными тепловыми датчиками являются термисторы.
Это устройство пассивного типа изменяет
Тепловые датчики
Наиболее известными тепловыми датчиками являются термисторы.
Это устройство пассивного типа изменяет
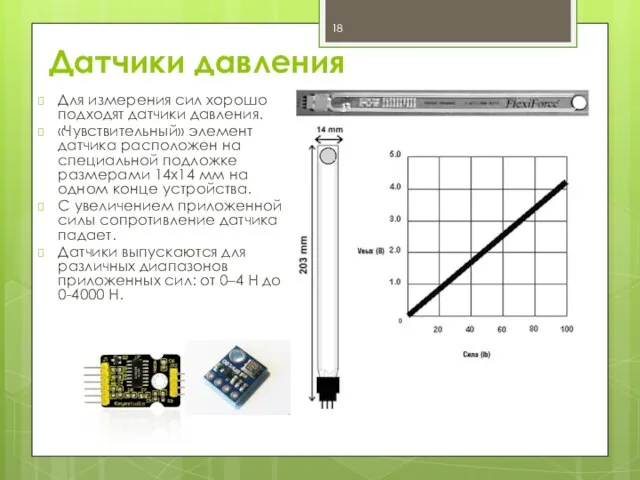
Датчики давления
Для измерения сил хорошо подходят датчики давления.
«Чувствительный» элемент датчика
Датчики давления
Для измерения сил хорошо подходят датчики давления.
«Чувствительный» элемент датчика

Датчики запаха
Диапазон реакций на запахи человеческого носа в настоящее время недостижим
Датчики запаха
Диапазон реакций на запахи человеческого носа в настоящее время недостижим

Датчики влажности
Датчики влажности

Камера и компьютерное зрение робота
Камера и компьютерное зрение робота
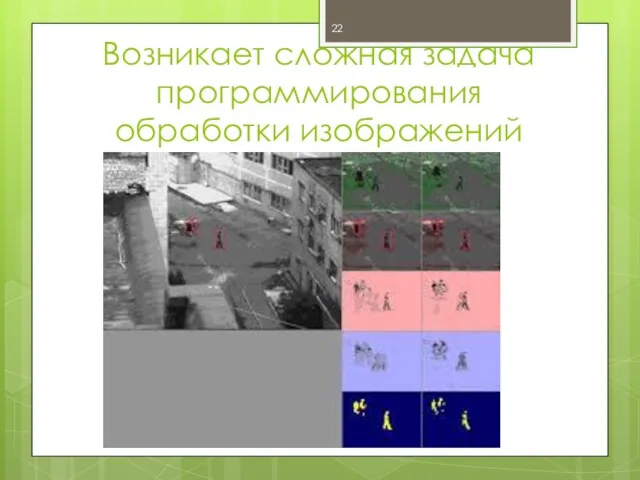
Возникает сложная задача программирования обработки изображений
Возникает сложная задача программирования обработки изображений
Система управления роботом
Система управления – это «мозг робота».
Используя сигналы
Система управления роботом
Система управления – это «мозг робота».
Используя сигналы

Управление электричеством
Управление вручную
Автоматическое управление
Управление электричеством
Управление вручную
Автоматическое управление

Arduino — это электронный конструктор и удобная платформа быстрой разработки электронных устройств
Arduino — это электронный конструктор и удобная платформа быстрой разработки электронных устройств

Arduino — это небольшая плата с собственным процессором и памятью.
На
Arduino — это небольшая плата с собственным процессором и памятью.
На

Принцип бутерброда
Ещё одной отличительной особенностью Arduino является наличие плат расширения, так
Принцип бутерброда
Ещё одной отличительной особенностью Arduino является наличие плат расширения, так

Собираем схему на Arduino
Собираем схему на Arduino

Система взаимосвязи
организует обмен информацией между роботом и человеком или другими
Система взаимосвязи
организует обмен информацией между роботом и человеком или другими
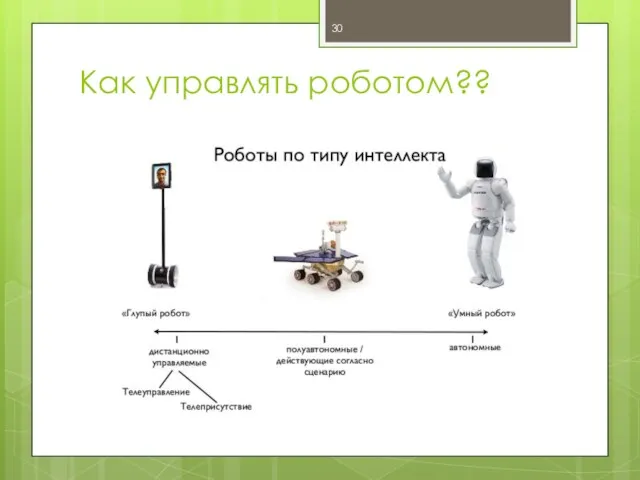
Как управлять роботом??
Как управлять роботом??
Пульт управления роботом
Кнопки (сенсорные, тактовые и т.п.)
Джойстики
Индикаторы (LCD-мониторы)
Специальные датчики (акселерометр, гироскоп
Пульт управления роботом
Кнопки (сенсорные, тактовые и т.п.)
Джойстики
Индикаторы (LCD-мониторы)
Специальные датчики (акселерометр, гироскоп

Кнопки на пульте располагают «с умом»:
- группируют по функциям;
- выделяют цветом
Кнопки на пульте располагают «с умом»:
- группируют по функциям;
- выделяют цветом

Какие кнопки нужно обязательно предусматривать:
кнопка включения/выключения
кнопки выбора режимов работы
Такие
Какие кнопки нужно обязательно предусматривать:
кнопка включения/выключения
кнопки выбора режимов работы
Такие

Сенсорная кнопка
#define ctsPin 2 // пин для емкостного датчика касания
int ledPin
Сенсорная кнопка
#define ctsPin 2 // пин для емкостного датчика касания
int ledPin
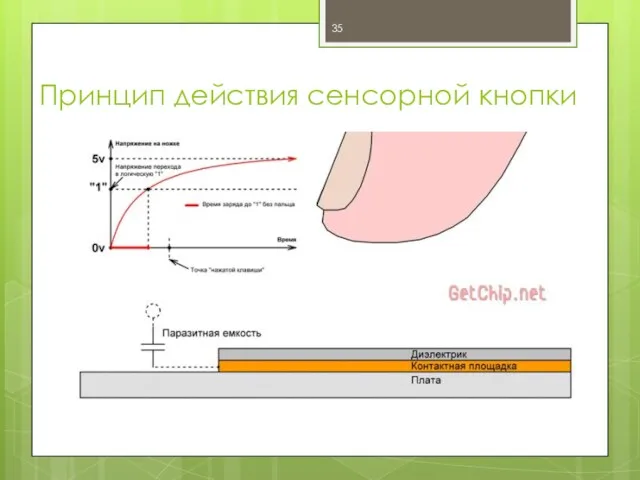
Принцип действия сенсорной кнопки
Принцип действия сенсорной кнопки

По такому принципу и
«фруктовая клавиатура» сделана
http://pikabu.ru/story/modul_sensornyikh_knopok_dlya_arduino_na_chipe_mpr121_3841584
По такому принципу и
«фруктовая клавиатура» сделана
http://pikabu.ru/story/modul_sensornyikh_knopok_dlya_arduino_na_chipe_mpr121_3841584
Джойстик
С помощью этого джойстика можно осуществлять управление роботом.
По осям X, Y
Джойстик
С помощью этого джойстика можно осуществлять управление роботом.
По осям X, Y

Самостоятельные движения робота
Значит и робота нужно научить познавать свое тело и
Самостоятельные движения робота
Значит и робота нужно научить познавать свое тело и
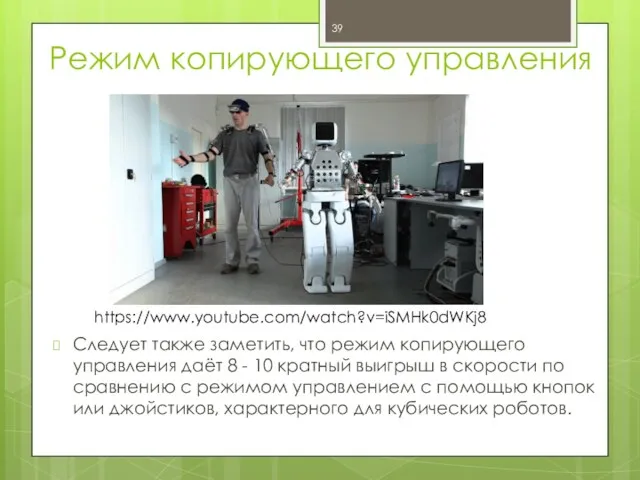
Режим копирующего управления
Следует также заметить, что режим копирующего управления даёт 8
Режим копирующего управления
Следует также заметить, что режим копирующего управления даёт 8

Это можно сделать при помощи специальных датчиков
Акселерометр - определяет угол наклона
Это можно сделать при помощи специальных датчиков
Акселерометр - определяет угол наклона
Искусственный интеллект
полностью автономные роботы с искусственным интеллектом ещё недостаточно умны,
Искусственный интеллект
полностью автономные роботы с искусственным интеллектом ещё недостаточно умны,
 Фотоальбом. Машенька
Фотоальбом. Машенька Международные и региональные торговые сети
Международные и региональные торговые сети Презентация к уроку Деление клетки. Митоз. естествознание-5 класс
Презентация к уроку Деление клетки. Митоз. естествознание-5 класс символы и эмблемы
символы и эмблемы Шаблоны презентаций - 5
Шаблоны презентаций - 5 Окна. Оконные проёмы. Варианты оформления
Окна. Оконные проёмы. Варианты оформления Методы оценки экономической эффективности инвестиционных проектов и их реализация в программном обеспечении
Методы оценки экономической эффективности инвестиционных проектов и их реализация в программном обеспечении G`alamat online school
G`alamat online school Система комп’ютерного моделювання процесів життєдіяльності органів і систем організму, Скіф
Система комп’ютерного моделювання процесів життєдіяльності органів і систем організму, Скіф Назначение, общее устройство и тактико-технические характеристики РСМ Р-166 (Р-166-0,5)
Назначение, общее устройство и тактико-технические характеристики РСМ Р-166 (Р-166-0,5) דור המייסדים - יונג ואדלר
דור המייסדים - יונג ואדלר Виды перевозок пассажиров автомобильным транспортом
Виды перевозок пассажиров автомобильным транспортом Бактериялар
Бактериялар Всемирный день без табака
Всемирный день без табака Функции рекламы и PR в организации
Функции рекламы и PR в организации Обустройство морских нефтегазовых месторождений
Обустройство морских нефтегазовых месторождений Основные теоремы магнитостатического поля
Основные теоремы магнитостатического поля Внутренние воды РТ
Внутренние воды РТ Генеральный план
Генеральный план prezentatsia
prezentatsia Управление экономической безопасности и противодействия коррупции. УЭБиПК УМВД России по Ульяновской области
Управление экономической безопасности и противодействия коррупции. УЭБиПК УМВД России по Ульяновской области Вопросы репродуктивного здоровья, современные методы обследования и лечения бесплодия
Вопросы репродуктивного здоровья, современные методы обследования и лечения бесплодия Современные технологии на уроках географии
Современные технологии на уроках географии Презентация Лоскутное шитье-неиссякаемый источник творчества
Презентация Лоскутное шитье-неиссякаемый источник творчества Гальваностегія. Приклад гальванізації сріблом (або золотом)
Гальваностегія. Приклад гальванізації сріблом (або золотом) Презентация День семьи
Презентация День семьи Новые подходы к изучению истории Великой Отечественной войны и их отражение в школьных учебниках
Новые подходы к изучению истории Великой Отечественной войны и их отражение в школьных учебниках Внутренние воды Пензенской области
Внутренние воды Пензенской области