- Кибернетика. Нейронные сети

Содержание
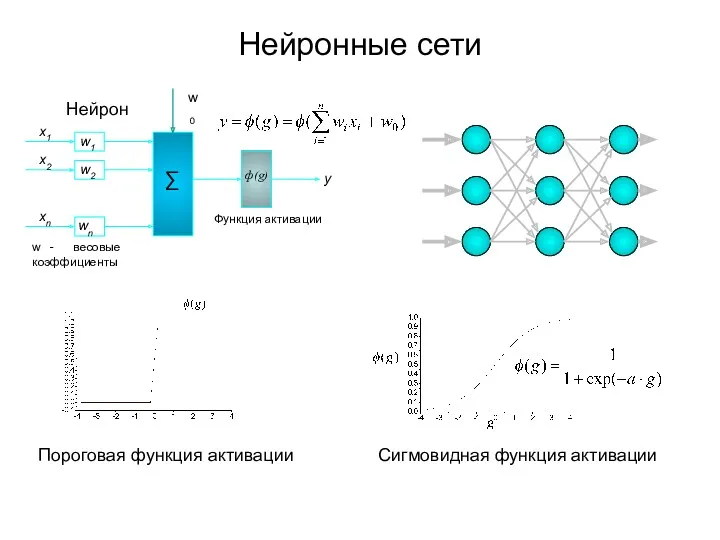
- 2. Нейронные сети Сигмовидная функция активации Пороговая функция активации y w1 w2 wn ∑ ф(g) x1 x2
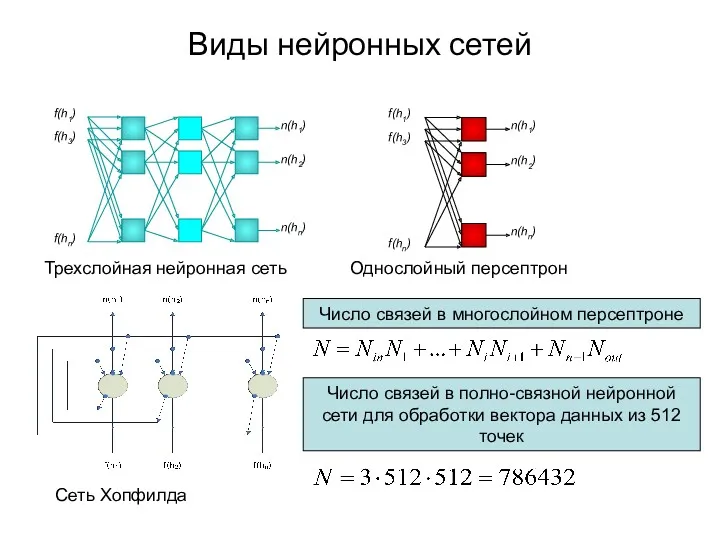
- 3. Виды нейронных сетей f(h1) f(hn) f(h3) n(h1) n(h2) n(hn) Трехслойная нейронная сеть n(h1) n(h2) n(hn) f(h1)
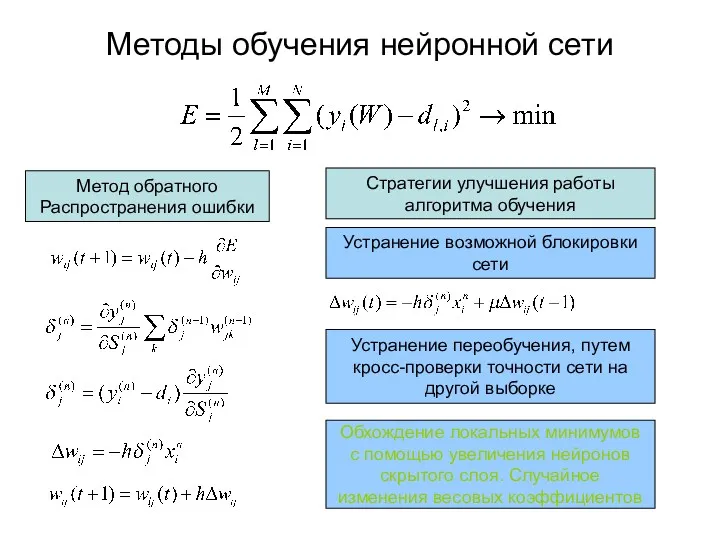
- 4. Методы обучения нейронной сети Метод обратного Распространения ошибки Устранение возможной блокировки сети Стратегии улучшения работы алгоритма
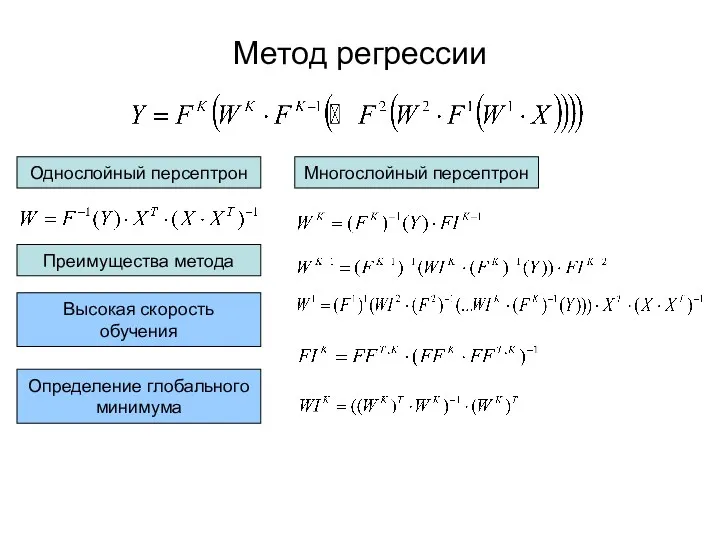
- 5. Метод регрессии Однослойный персептрон Многослойный персептрон Преимущества метода Высокая скорость обучения Определение глобального минимума
- 6. Сеть с комбинированным обучением n(h1) n(h2) n(hn)
- 7. Управляют беспилотником В 1996 году фирмой Accurate Automation Corp(http://www.accurate-automation.com), Chattanooga, TN по заказу NASA и Air
- 8. Нейронные сети рисуют картины
- 9. Предсказание, прогнозирование
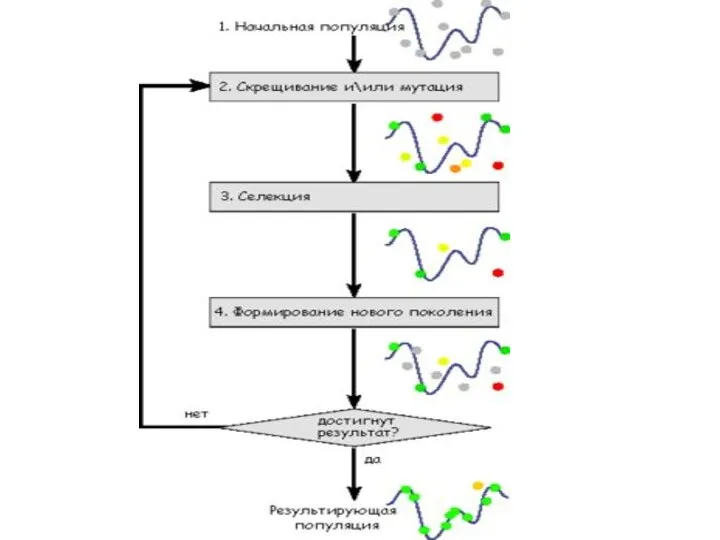
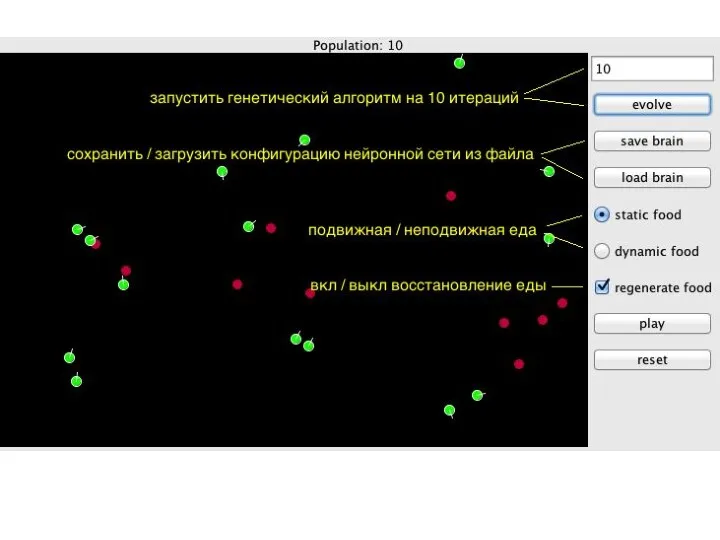
- 10. Оптимизация с использованием генетического алгоритма Генерация нескольких популяций 1 2 N кроссинговер выбор двух особей из
- 13. Аппроксимация изображения полигонами
- 15. Скачать презентацию
Нейронные сети
Сигмовидная функция активации
Пороговая функция активации
y
w1
w2
wn
∑
ф(g)
x1
x2
Нейронные сети
Сигмовидная функция активации
Пороговая функция активации
y
w1
w2
wn
∑
ф(g)
x1
x2
Виды нейронных сетей
f(h1)
f(hn)
f(h3)
n(h1)
n(h2)
n(hn)
Трехслойная нейронная сеть
n(h1)
n(h2)
n(hn)
f(h1)
f(hn)
f(h3)
Однослойный персептрон
Сеть Хопфилда
Число связей в многослойном персептроне
Число
Виды нейронных сетей
f(h1)
f(hn)
f(h3)
n(h1)
n(h2)
n(hn)
Трехслойная нейронная сеть
n(h1)
n(h2)
n(hn)
f(h1)
f(hn)
f(h3)
Однослойный персептрон
Сеть Хопфилда
Число связей в многослойном персептроне
Число
Методы обучения нейронной сети
Метод обратного
Распространения ошибки
Устранение возможной блокировки сети
Стратегии улучшения работы
Методы обучения нейронной сети
Метод обратного
Распространения ошибки
Устранение возможной блокировки сети
Стратегии улучшения работы
Метод регрессии
Однослойный персептрон
Многослойный персептрон
Преимущества метода
Высокая скорость обучения
Определение глобального минимума
Метод регрессии
Однослойный персептрон
Многослойный персептрон
Преимущества метода
Высокая скорость обучения
Определение глобального минимума
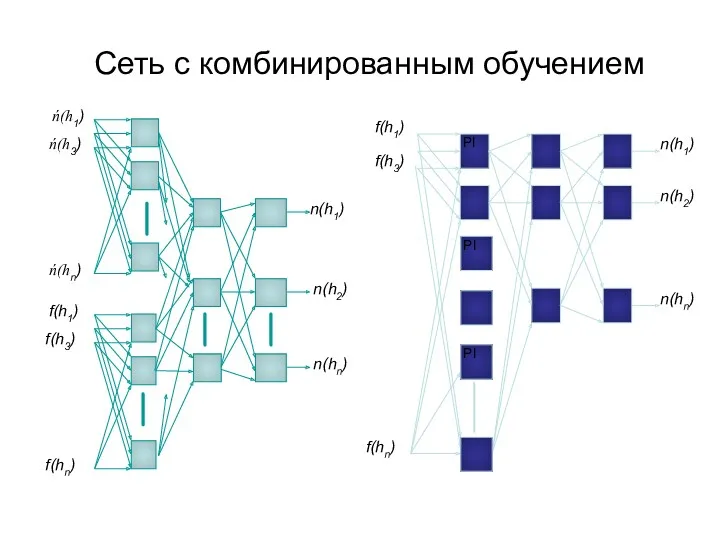
Сеть с комбинированным обучением
n(h1)
n(h2)
n(hn)
Сеть с комбинированным обучением
n(h1)
n(h2)
n(hn)

Управляют беспилотником
В 1996 году фирмой Accurate Automation Corp(http://www.accurate-automation.com), Chattanooga, TN по
Управляют беспилотником
В 1996 году фирмой Accurate Automation Corp(http://www.accurate-automation.com), Chattanooga, TN по
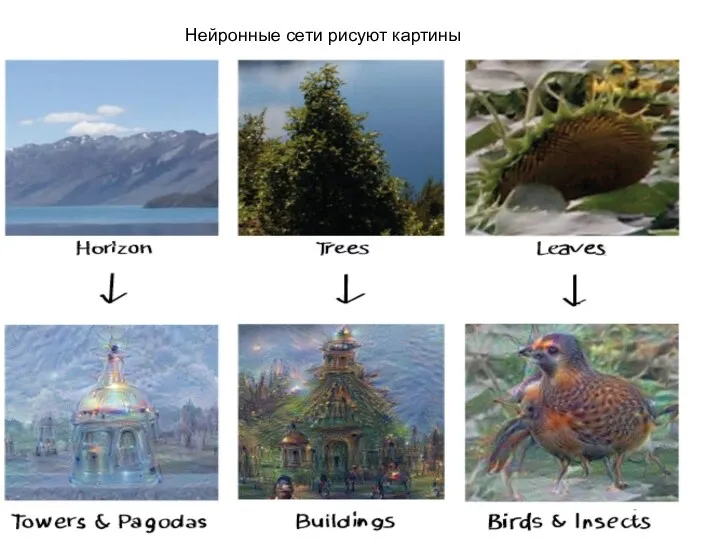
Нейронные сети рисуют картины
Нейронные сети рисуют картины
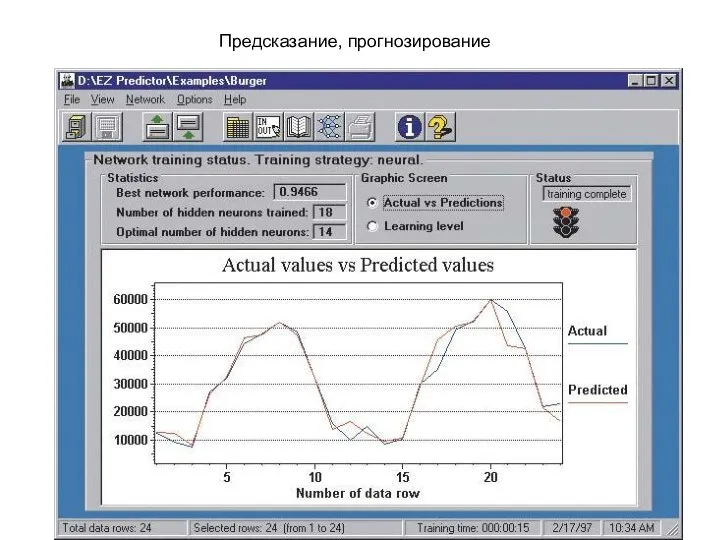
Предсказание, прогнозирование
Предсказание, прогнозирование
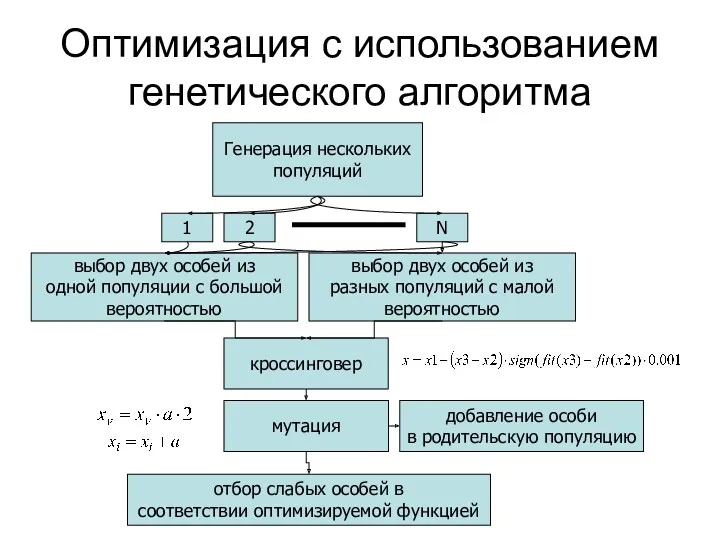
Оптимизация с использованием генетического алгоритма
Генерация нескольких
популяций
1
2
N
кроссинговер
выбор двух особей из
одной популяции с
Оптимизация с использованием генетического алгоритма
Генерация нескольких
популяций
1
2
N
кроссинговер
выбор двух особей из
одной популяции с
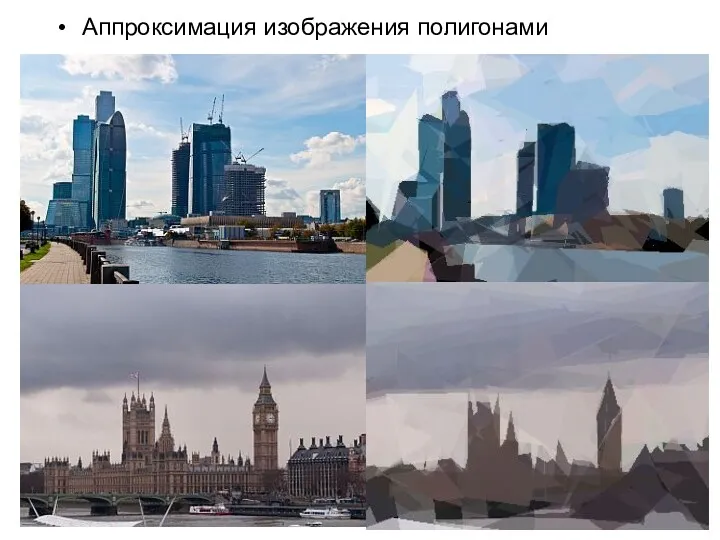
Аппроксимация изображения полигонами
Аппроксимация изображения полигонами
 Замена электродвигателей СТД 8000 на электродвигатели марки Нидек на ЛПДС Чепурского АК Транснефть
Замена электродвигателей СТД 8000 на электродвигатели марки Нидек на ЛПДС Чепурского АК Транснефть Книга 6 СМИД 2021
Книга 6 СМИД 2021 Автоматизированное рабочее место технолога-машиностроителя
Автоматизированное рабочее место технолога-машиностроителя Глобализация КСО. Особенности корпоративной социальной ответственности транснациональных корпораций
Глобализация КСО. Особенности корпоративной социальной ответственности транснациональных корпораций Возрождение культурных традиций, связанных с театральной, хореографической, вокальной и концертной деятельностью, социальный проект+презентация
Возрождение культурных традиций, связанных с театральной, хореографической, вокальной и концертной деятельностью, социальный проект+презентация Стили в одежде
Стили в одежде Процесс запуска и приема СОД
Процесс запуска и приема СОД Чёрная металлургия. Факторы размещения предприятий чёрной металлургии
Чёрная металлургия. Факторы размещения предприятий чёрной металлургии Я - Россиянин! Классный час к 20-летию Конституции Российской Федерации
Я - Россиянин! Классный час к 20-летию Конституции Российской Федерации Система компенсации давления (JEF/JEG)
Система компенсации давления (JEF/JEG) Презентация 9 мая- День Победы
Презентация 9 мая- День Победы Воспитание нравственных качеств детей дошкольного возраста через слушание музыкальных произведений, посвящённых теме Игрушка
Воспитание нравственных качеств детей дошкольного возраста через слушание музыкальных произведений, посвящённых теме Игрушка Профессии
Профессии Ваше личное руководство к интенсиву с Василием Поповым День 4. Кундалини
Ваше личное руководство к интенсиву с Василием Поповым День 4. Кундалини Основная школа – пространство выбора
Основная школа – пространство выбора 20231011_oeni_-_konferentsiya_-_kopiya111
20231011_oeni_-_konferentsiya_-_kopiya111 Родительское собрание. Садимся за уроки. 2 класс
Родительское собрание. Садимся за уроки. 2 класс Возвещаем о спасении через веру во Христа и готовим Его учеников на личных встречах
Возвещаем о спасении через веру во Христа и готовим Его учеников на личных встречах Определение высоты здания насосной станции
Определение высоты здания насосной станции Relevant Issues of the Public Policy in the Tourism Sphere
Relevant Issues of the Public Policy in the Tourism Sphere Химические волокна
Химические волокна Становление дошкольного образования в России
Становление дошкольного образования в России Жылулық құбылыстар
Жылулық құбылыстар Особенности работы старшего воспитателя в условиях ФГОС ДО. Методика проведения педагогических советов
Особенности работы старшего воспитателя в условиях ФГОС ДО. Методика проведения педагогических советов Своя игра по математике
Своя игра по математике Разработка лабораторного практикума на ПЛИС. Основы микропроцессорной техники
Разработка лабораторного практикума на ПЛИС. Основы микропроцессорной техники Презентация Профилактика речевых нарушений в режимных моментах и на прогулке
Презентация Профилактика речевых нарушений в режимных моментах и на прогулке Дидактическая игра для детей мл. и ср. групп для интерактивной доски
Дидактическая игра для детей мл. и ср. групп для интерактивной доски