- Кинематика роботов. (Лекция 2)

Содержание
- 2. Часть 1. Кинематика роботов. Кинематические схемы.
- 3. Как выбрать кинематику мобильного робота ?
- 4. Колеса …
- 5. Рис.1. Формула "car_like" (автомобильная). Рис.2. Формула "differential drive".
- 6. Рис.3. Формула "omni_triangle". Рис.4. Формула "omni_quad".
- 7. Рис.5. Формула "ball_wheel".
- 8. Рис.6. Формула "mecanum_triangle". Рис.7. Формула "mecanum_quad".
- 9. ОМНИБОТ
- 10. ОМНИБОТ
- 11. Рис.8. Формула "powered_wheel". Рис.9. Формула "castor_wheel".
- 12. Сферороботы
- 13. Робот-шар SpheRob (Россия).
- 14. Tear Drop от Pegeaut (MoVille).
- 15. MotoBall. Университет Сан-Хосе, США.
- 16. Часть 2. Кинематика роботов. Робот с дифференциальным приводом.
- 17. Робот с дифференциальным пиводом – «Аргонавт-3».
- 18. Робот с дифференциальным приводом – IE-POPBOT.
- 19. Кинематические связи.
- 20. Робот на траектории.
- 21. Робот на траектории.
- 22. Кривизна траектории.
- 23. Кинематика робота с дифференциальным приводом.
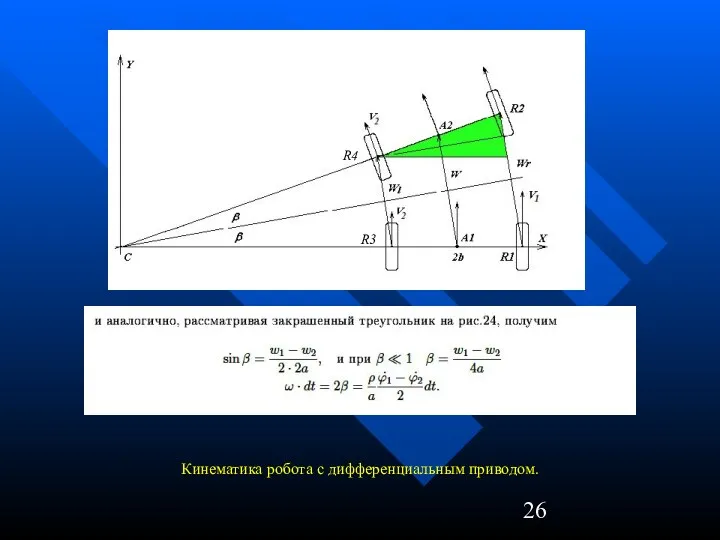
- 24. Кинематика робота с дифференциальным приводом. Расчет элементарного перемещения и поворота.
- 25. Кинематика робота с дифференциальным приводом.
- 26. Кинематика робота с дифференциальным приводом. R3 R4
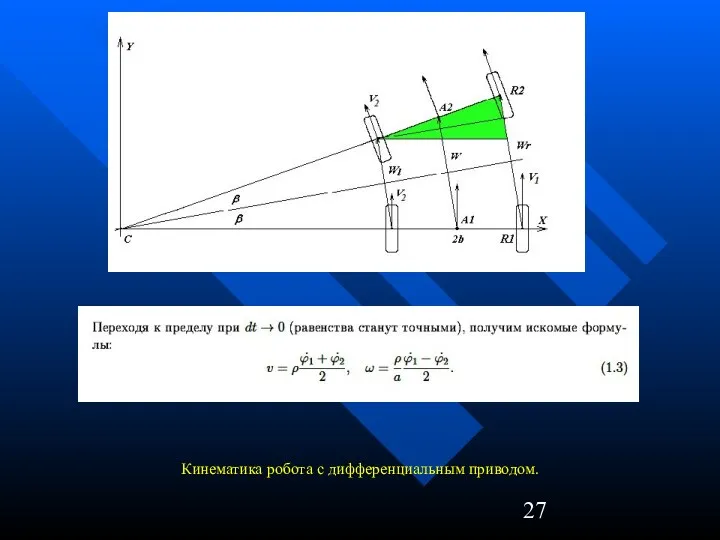
- 27. Кинематика робота с дифференциальным приводом.
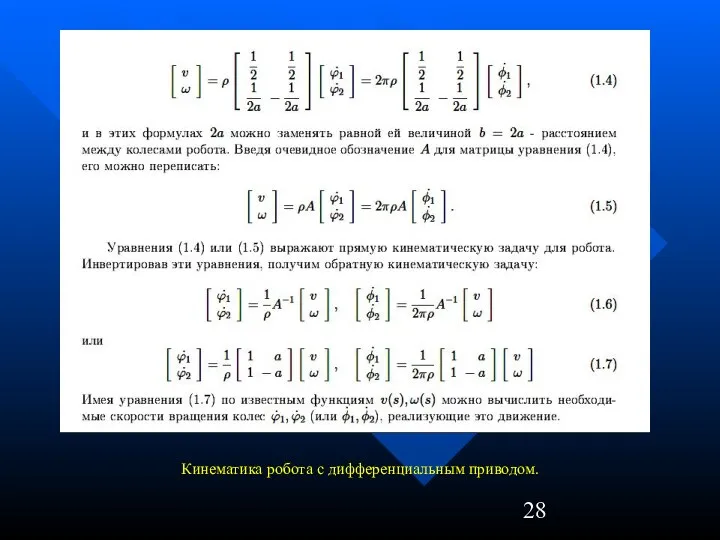
- 28. Кинематика робота с дифференциальным приводом.
- 29. Кинематическое управление.
- 30. Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
- 31. Кинематика робота – движение по эпитрохоиде.
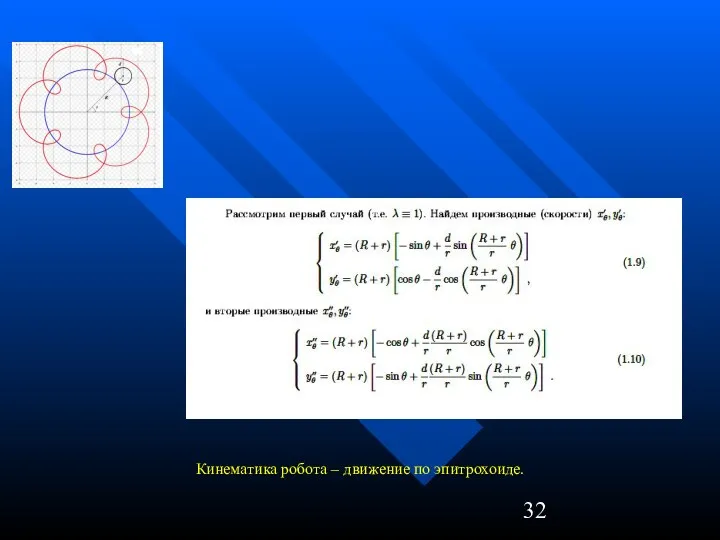
- 32. Кинематика робота – движение по эпитрохоиде.
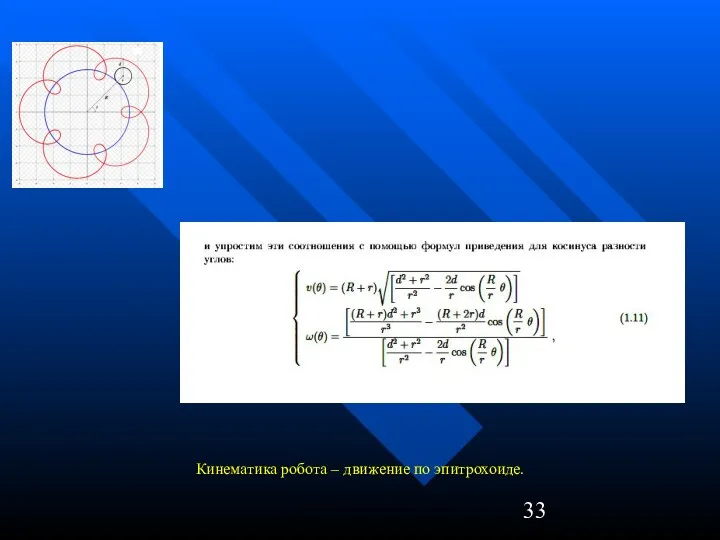
- 33. Кинематика робота – движение по эпитрохоиде.
- 34. Кинематика робота – движение по эпитрохоиде.
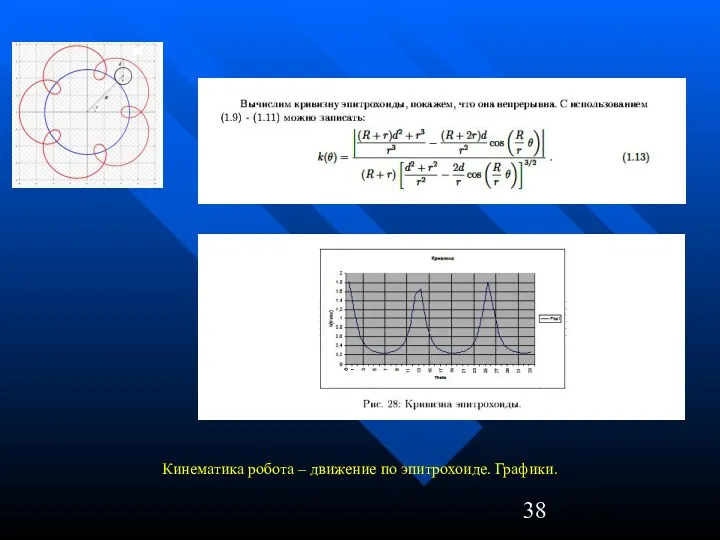
- 35. Кинематика робота – движение по эпитрохоиде. Графики.
- 36. Кинематика робота – движение по эпитрохоиде. Графики.
- 37. Кинематика робота – движение по эпитрохоиде. Графики.
- 38. Кинематика робота – движение по эпитрохоиде. Графики.
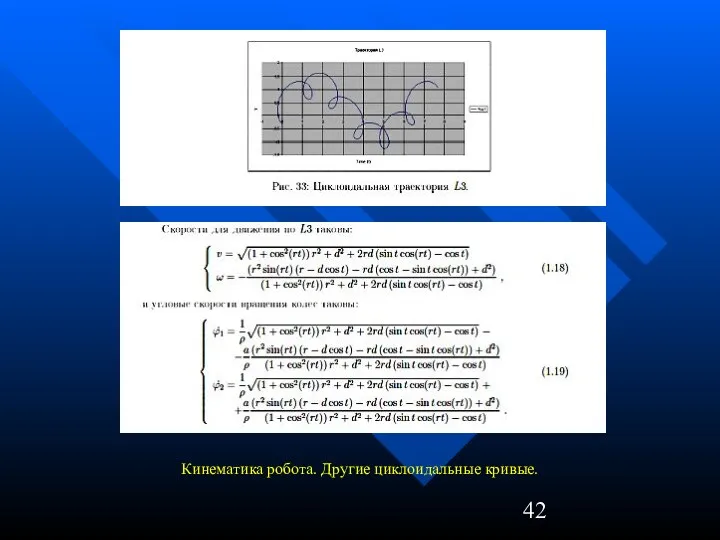
- 39. Кинематика робота. Другие циклоидальные кривые.
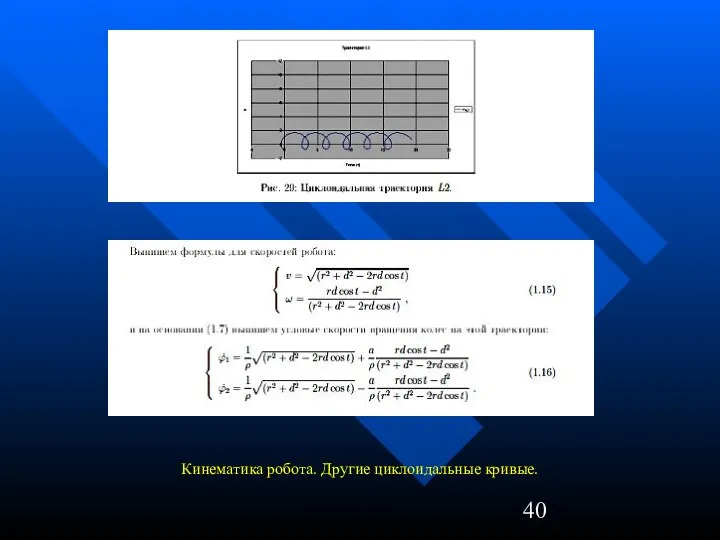
- 40. Кинематика робота. Другие циклоидальные кривые.
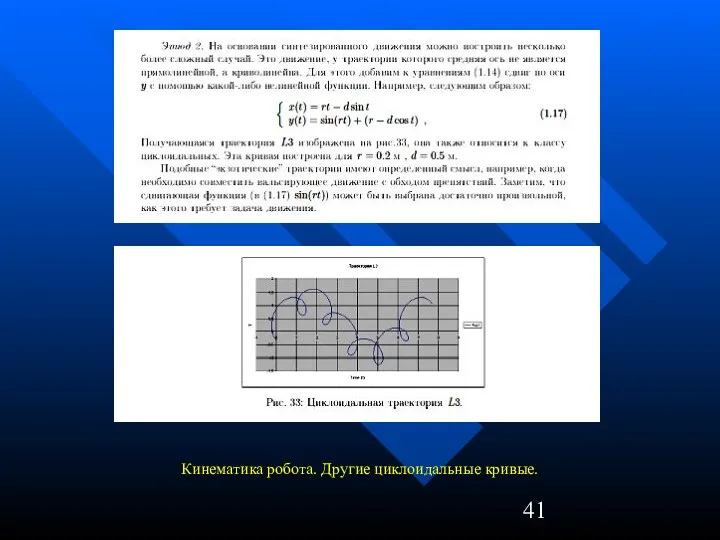
- 41. Кинематика робота. Другие циклоидальные кривые.
- 42. Кинематика робота. Другие циклоидальные кривые.
- 43. Кинематика робота. Движение с постоянным модулем скорости.
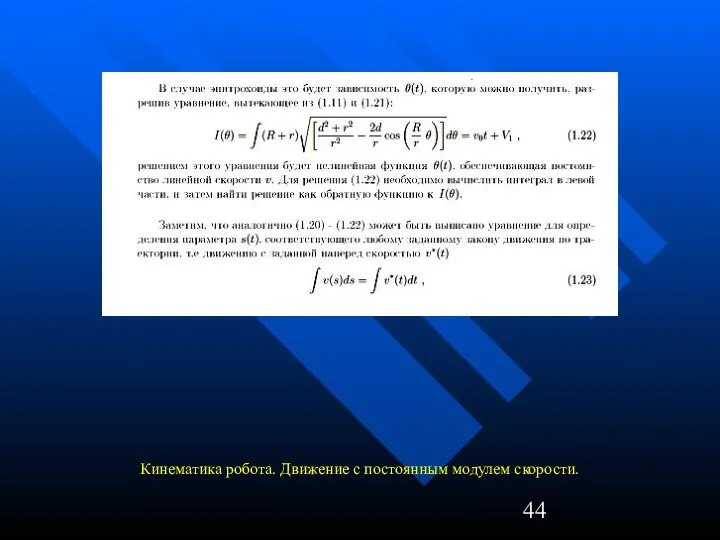
- 44. Кинематика робота. Движение с постоянным модулем скорости.
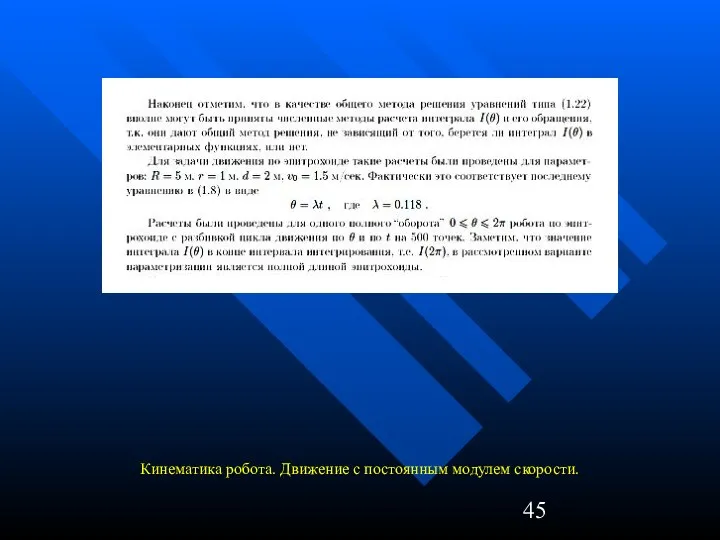
- 45. Кинематика робота. Движение с постоянным модулем скорости.
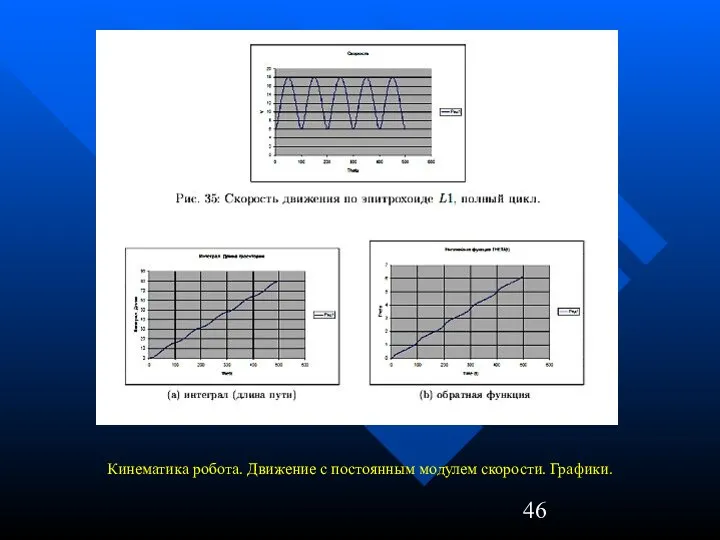
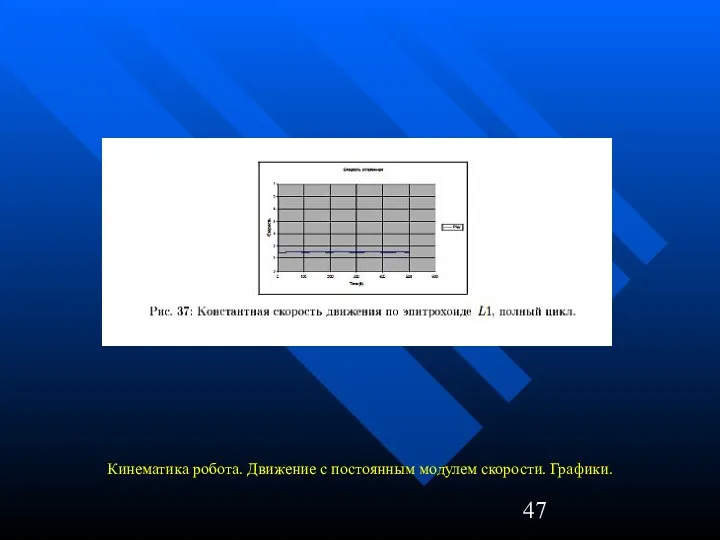
- 46. Кинематика робота. Движение с постоянным модулем скорости. Графики.
- 47. Кинематика робота. Движение с постоянным модулем скорости. Графики.
- 48. Особенности и их разрешение.
- 49. Кинематика робота. Траектория «восьмерка». особая точка А (B, C, D)
- 50. Кинематика робота. Траектория «восьмерка».
- 51. Кинематика робота. Первое решение – трапецеидальный профиль.
- 52. Кинематика робота. Первое решение – трапецеидальный профиль.
- 53. Кинематика робота. Первое решение – трапецеидальный профиль.
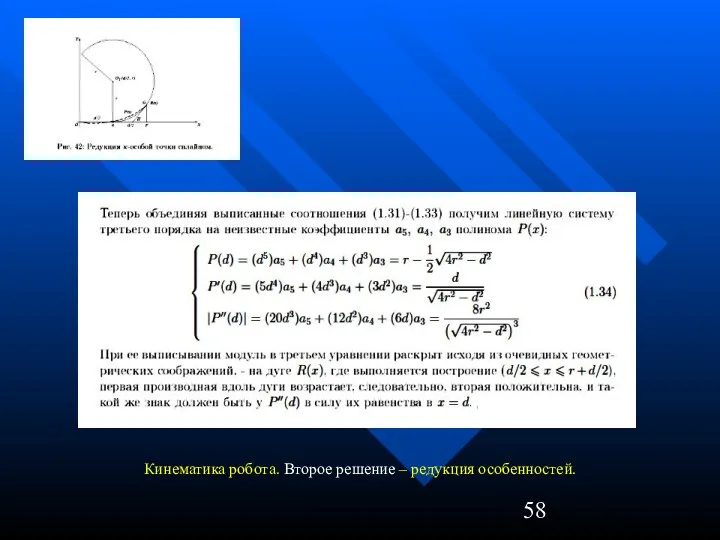
- 54. Кинематика робота. Второе решение – редукция особенностей.
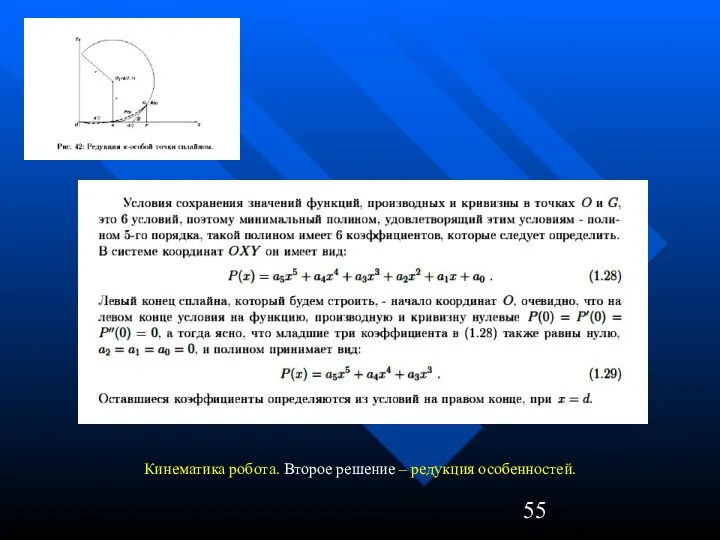
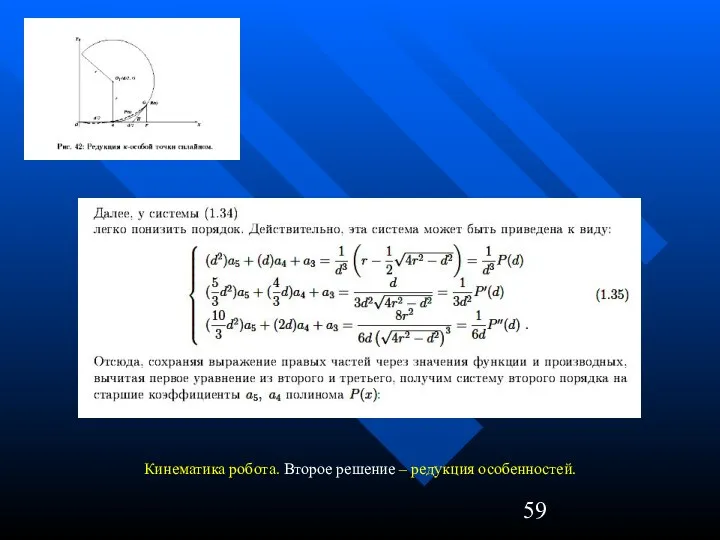
- 55. Кинематика робота. Второе решение – редукция особенностей.
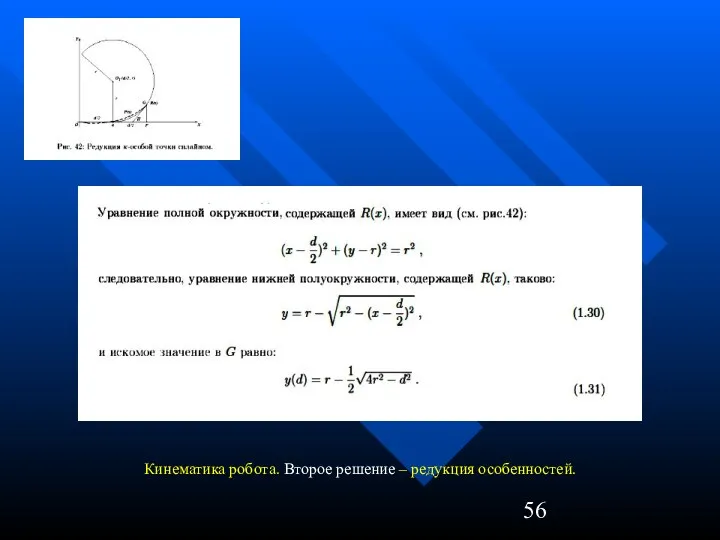
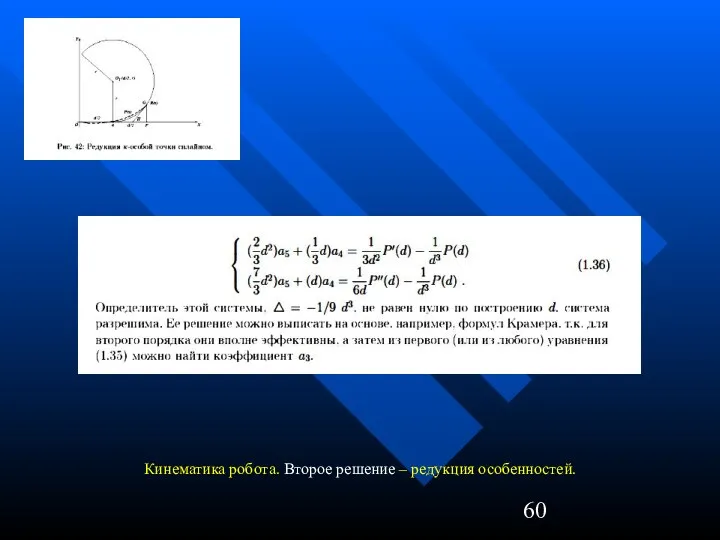
- 56. Кинематика робота. Второе решение – редукция особенностей.
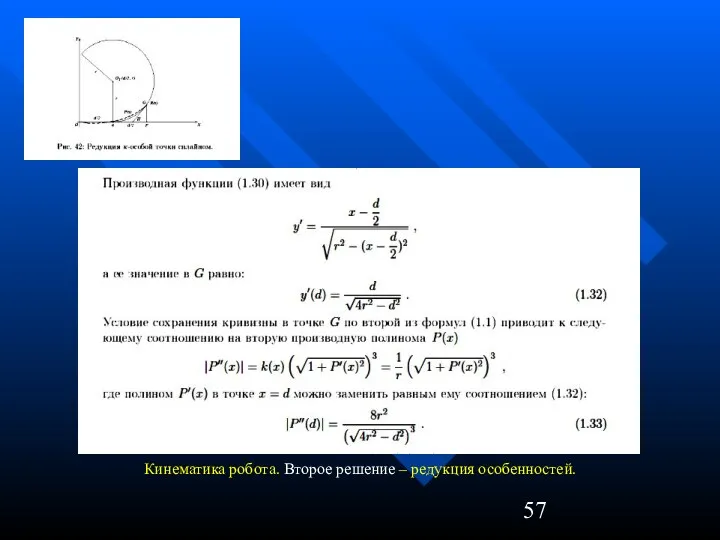
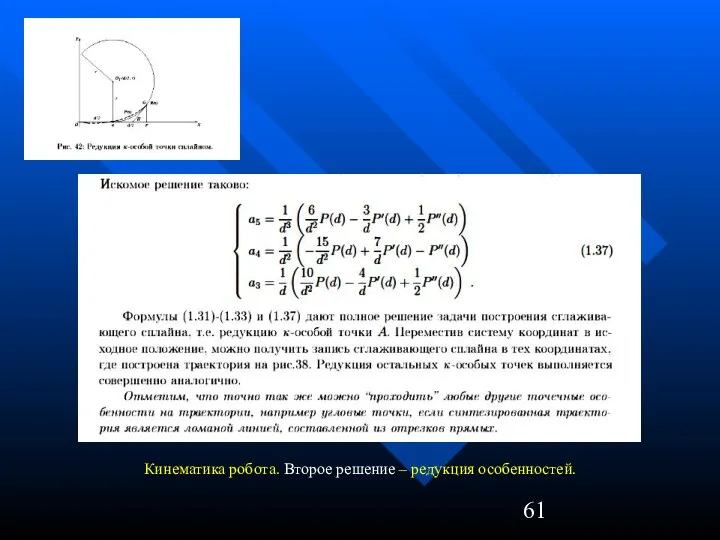
- 57. Кинематика робота. Второе решение – редукция особенностей.
- 58. Кинематика робота. Второе решение – редукция особенностей.
- 59. Кинематика робота. Второе решение – редукция особенностей.
- 60. Кинематика робота. Второе решение – редукция особенностей.
- 61. Кинематика робота. Второе решение – редукция особенностей.
- 62. Кинематика робота. Второе решение – численный пример.
- 63. Кинематика робота. Второе решение – численный пример.
- 64. Кинематика робота. Второе решение – численный пример.
- 65. Кинематика робота. Второе решение – численный пример.
- 66. Резюме
- 67. Кинематика робота. РЕЗЮМЕ.
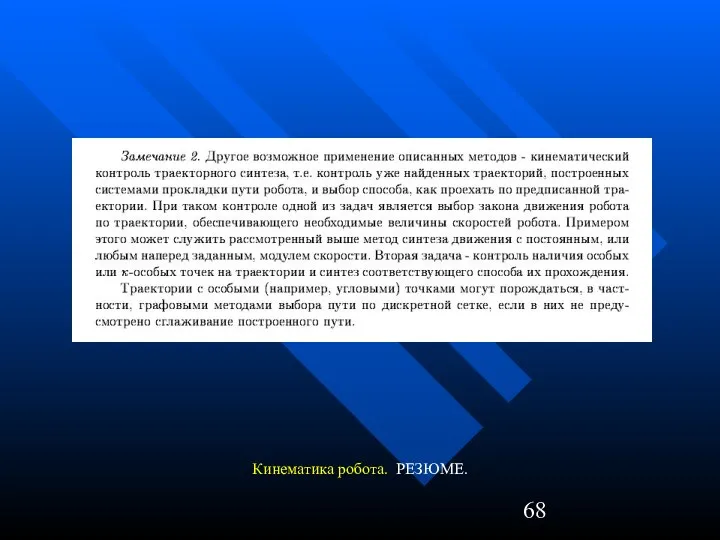
- 68. Кинематика робота. РЕЗЮМЕ.
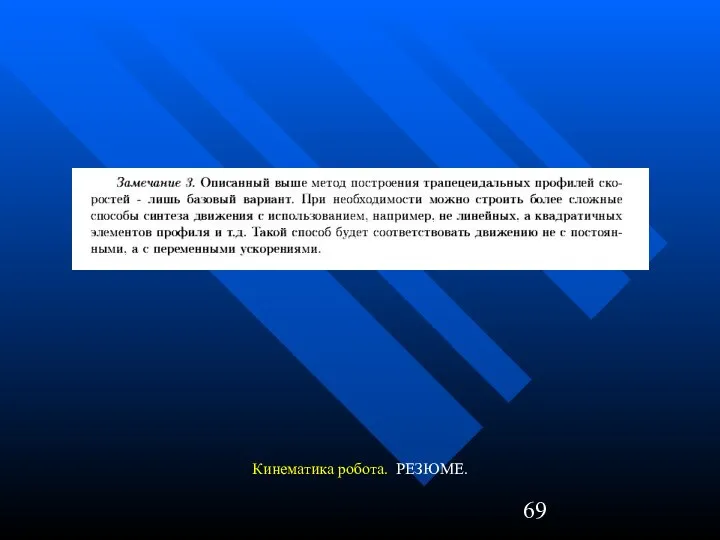
- 69. Кинематика робота. РЕЗЮМЕ.
- 70. Кинематика робота. РЕЗЮМЕ.
- 72. Скачать презентацию
Часть 1. Кинематика роботов.
Кинематические схемы.
Часть 1. Кинематика роботов.
Кинематические схемы.
Как выбрать кинематику мобильного робота ?
Как выбрать кинематику мобильного робота ?

Колеса …
Колеса …
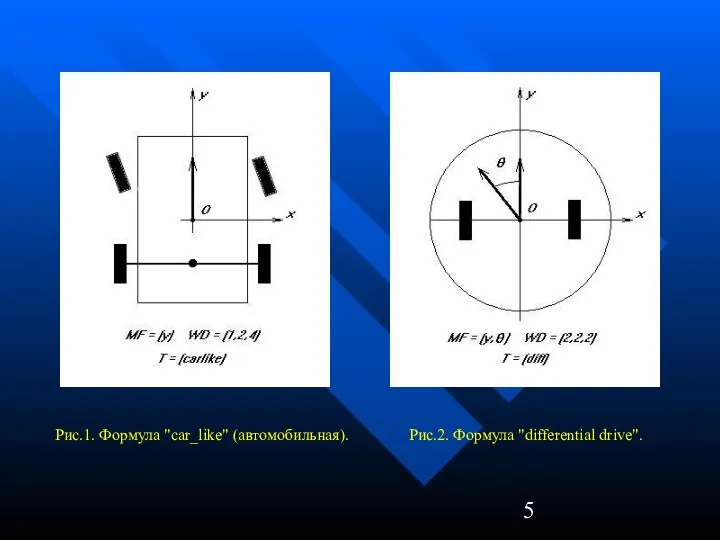
Рис.1. Формула "car_like" (автомобильная).
Рис.2. Формула "differential drive".
Рис.1. Формула "car_like" (автомобильная).
Рис.2. Формула "differential drive".
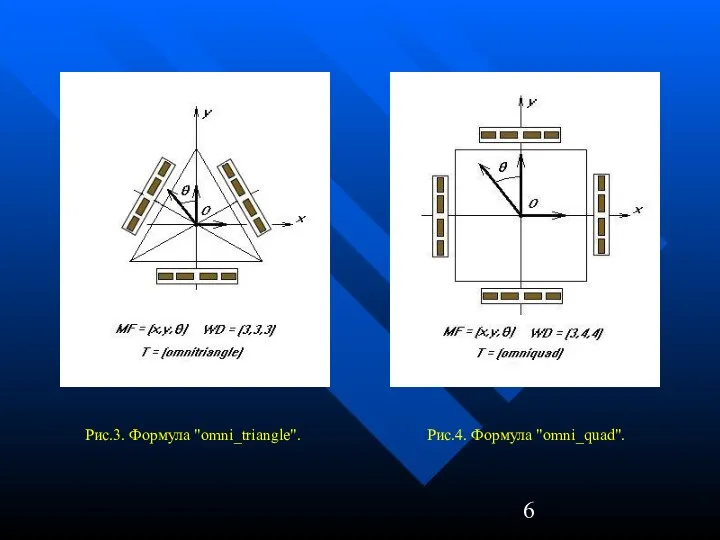
Рис.3. Формула "omni_triangle".
Рис.4. Формула "omni_quad".
Рис.3. Формула "omni_triangle".
Рис.4. Формула "omni_quad".
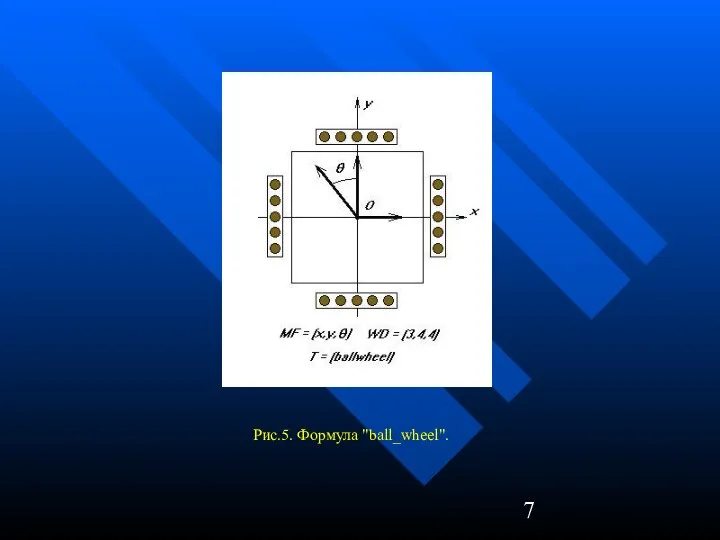
Рис.5. Формула "ball_wheel".
Рис.5. Формула "ball_wheel".
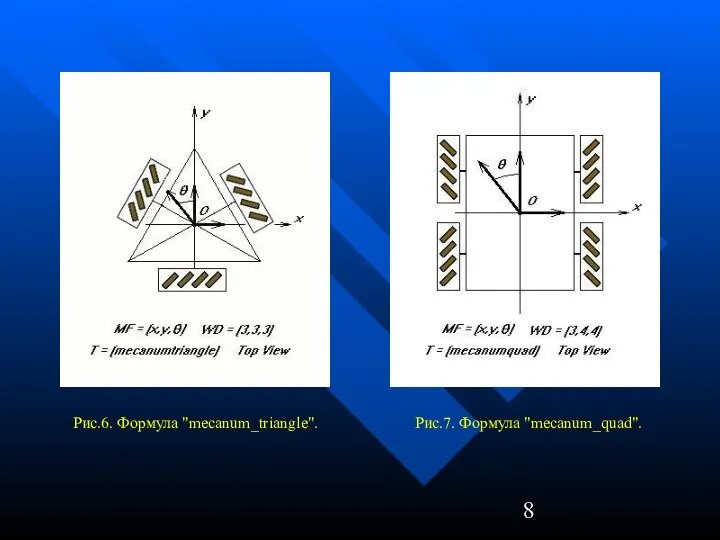
Рис.6. Формула "mecanum_triangle".
Рис.7. Формула "mecanum_quad".
Рис.6. Формула "mecanum_triangle".
Рис.7. Формула "mecanum_quad".
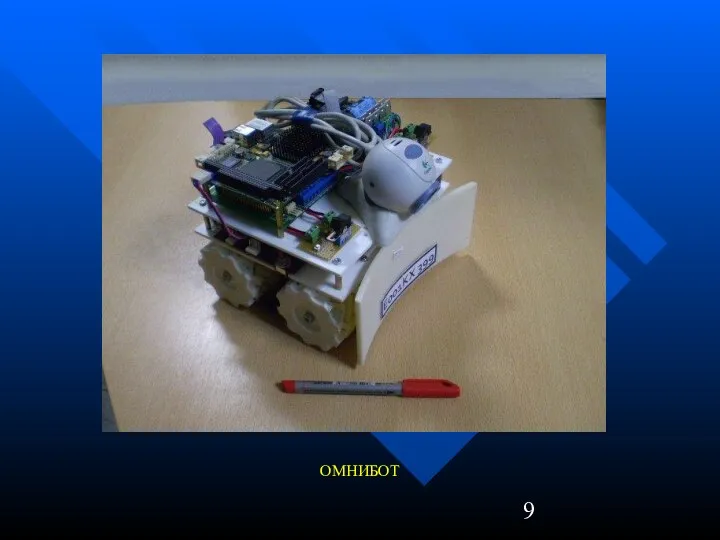
ОМНИБОТ
ОМНИБОТ
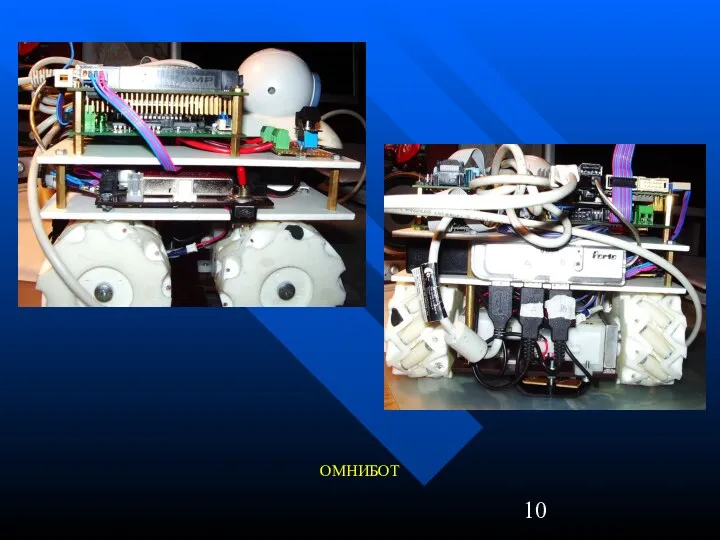
ОМНИБОТ
ОМНИБОТ
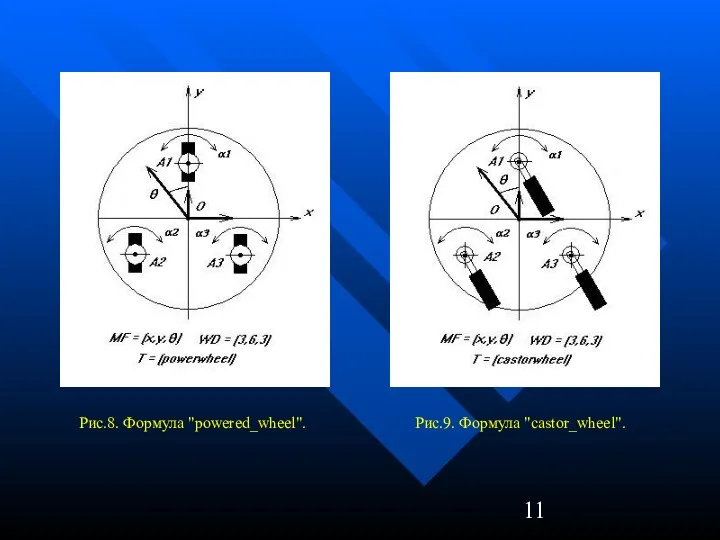
Рис.8. Формула "powered_wheel".
Рис.9. Формула "castor_wheel".
Рис.8. Формула "powered_wheel".
Рис.9. Формула "castor_wheel".
Сферороботы
Сферороботы

Робот-шар SpheRob (Россия).
Робот-шар SpheRob (Россия).
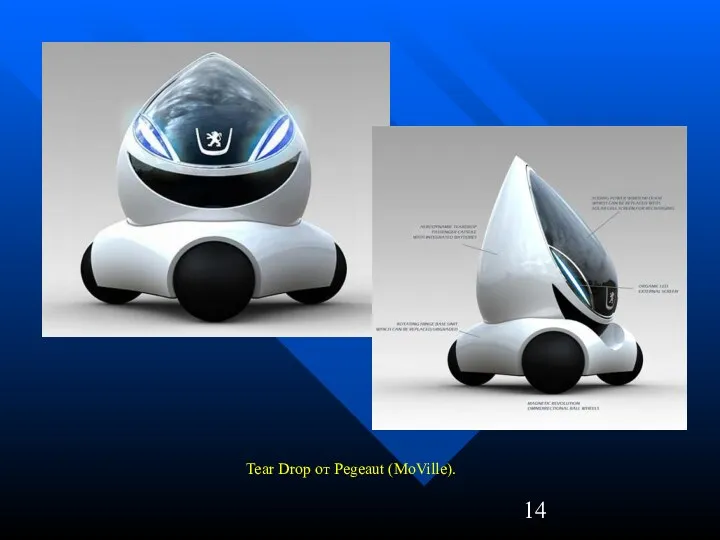
Tear Drop от Pegeaut (MoVille).
Tear Drop от Pegeaut (MoVille).
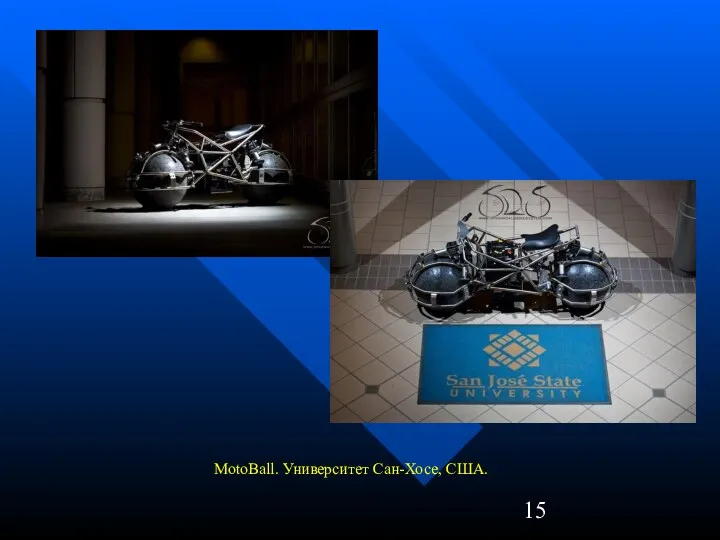
MotoBall. Университет Сан-Хосе, США.
MotoBall. Университет Сан-Хосе, США.
Часть 2. Кинематика роботов.
Робот с дифференциальным приводом.
Часть 2. Кинематика роботов.
Робот с дифференциальным приводом.

Робот с дифференциальным пиводом – «Аргонавт-3».
Робот с дифференциальным пиводом – «Аргонавт-3».

Робот с дифференциальным приводом – IE-POPBOT.
Робот с дифференциальным приводом – IE-POPBOT.
Кинематические связи.
Кинематические связи.
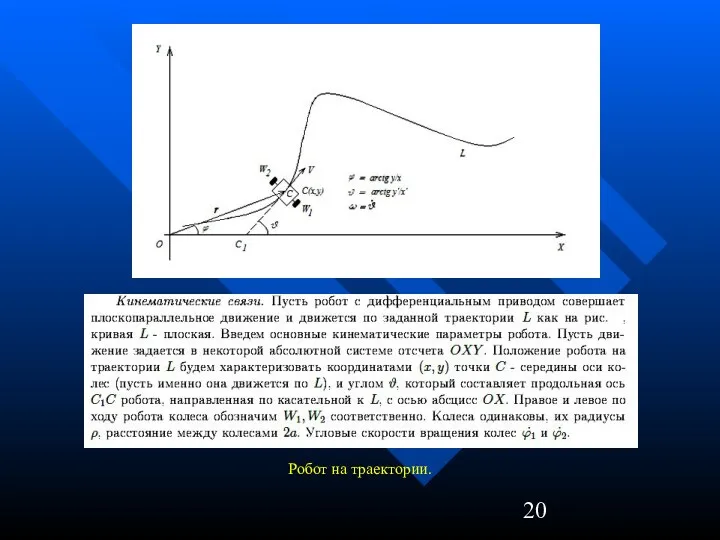
Робот на траектории.
Робот на траектории.
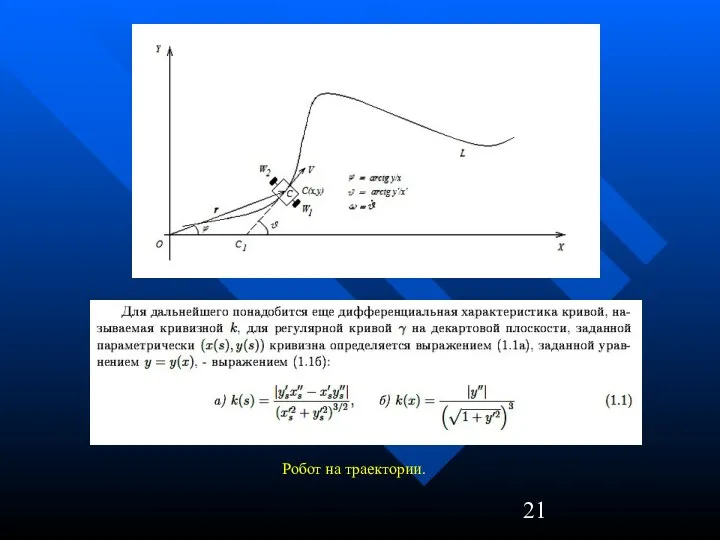
Робот на траектории.
Робот на траектории.
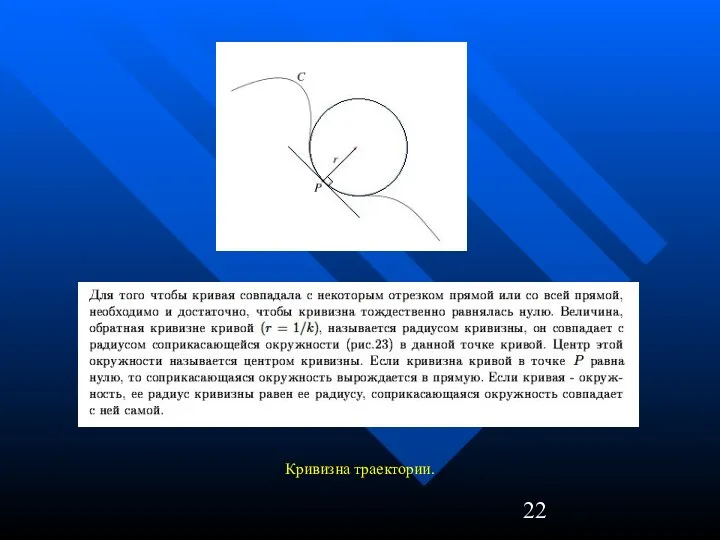
Кривизна траектории.
Кривизна траектории.
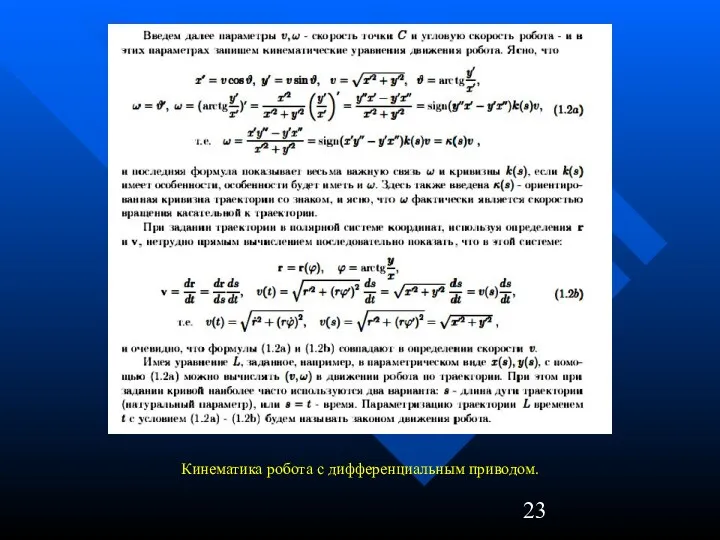
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
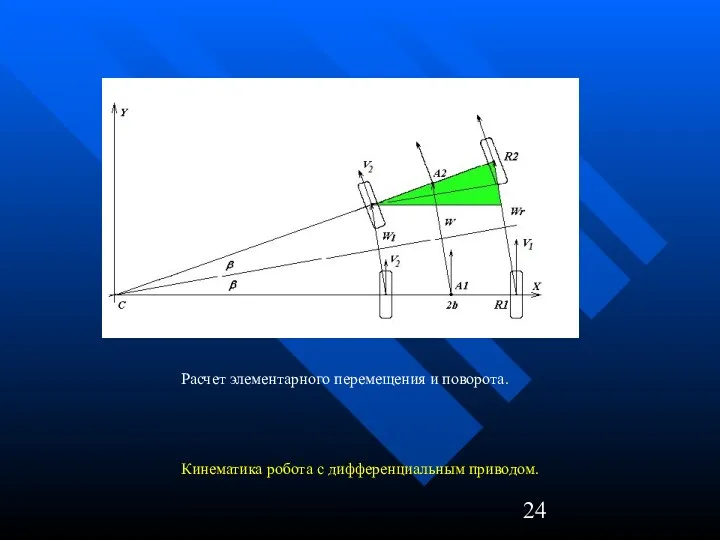
Кинематика робота с дифференциальным приводом.
Расчет элементарного перемещения и поворота.
Кинематика робота с дифференциальным приводом.
Расчет элементарного перемещения и поворота.
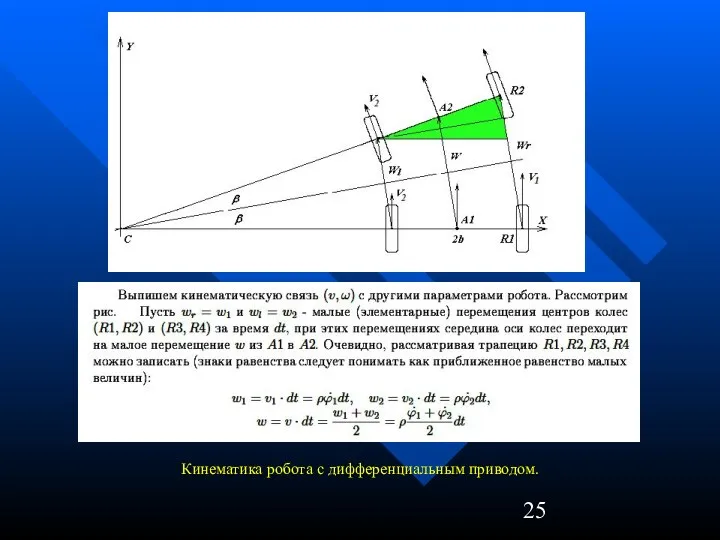
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
R3
R4
Кинематика робота с дифференциальным приводом.
R3
R4
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
Кинематика робота с дифференциальным приводом.
Кинематическое управление.
Кинематическое управление.
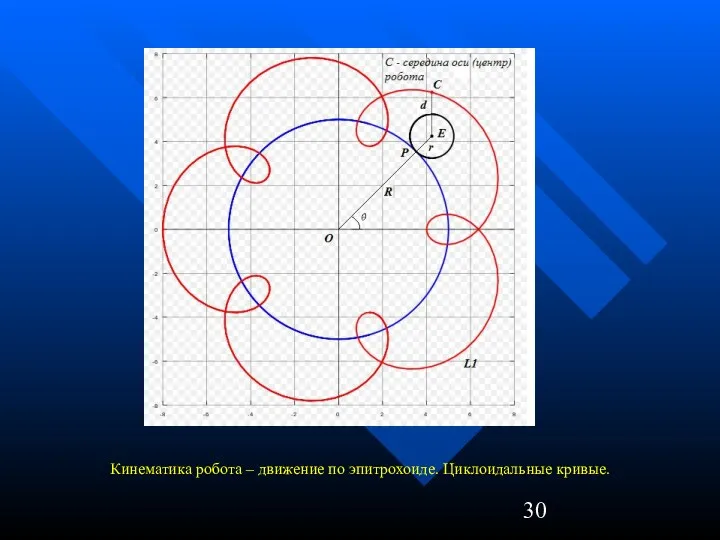
Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
Кинематика робота – движение по эпитрохоиде. Циклоидальные кривые.
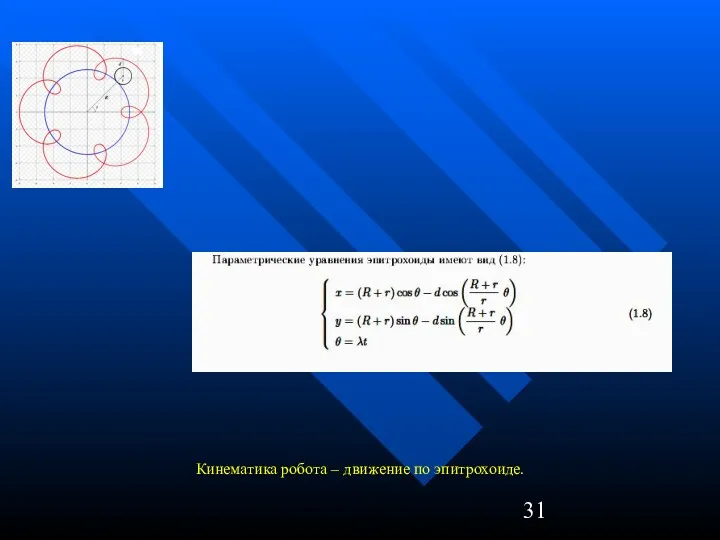
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
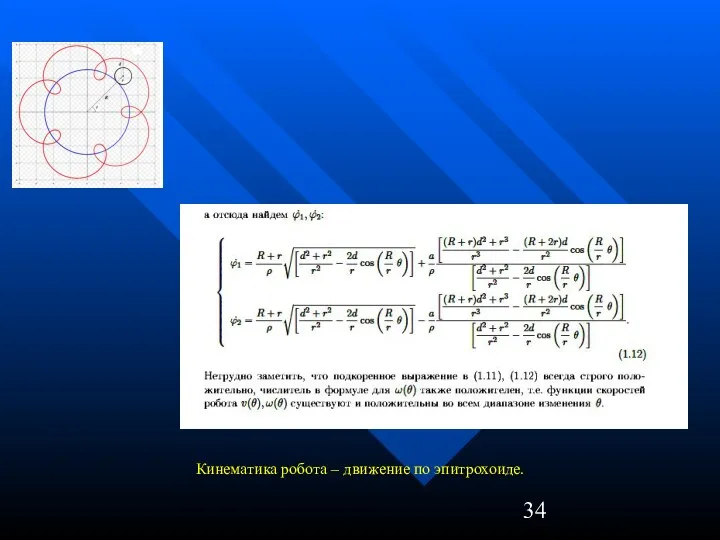
Кинематика робота – движение по эпитрохоиде.
Кинематика робота – движение по эпитрохоиде.
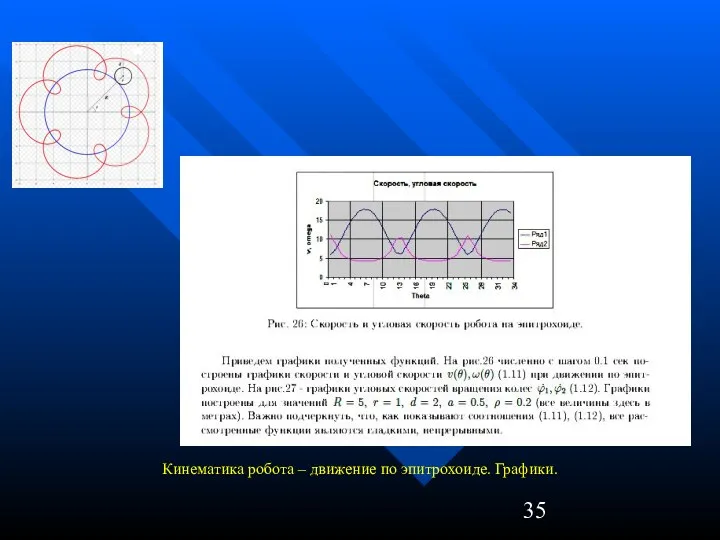
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
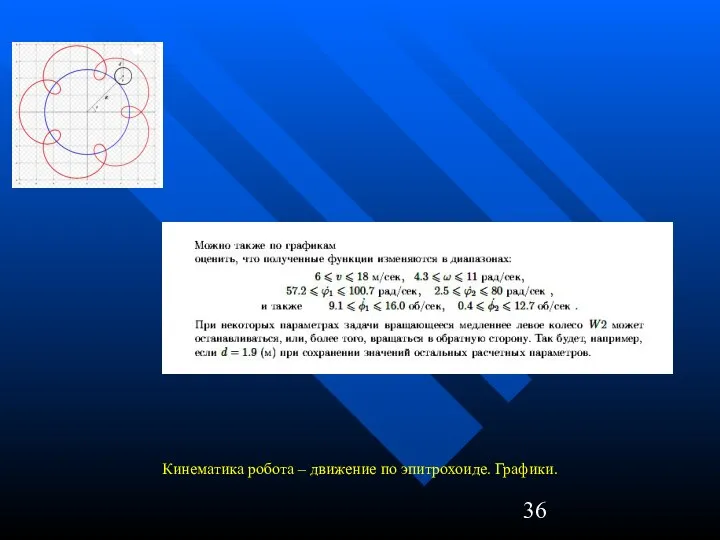
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
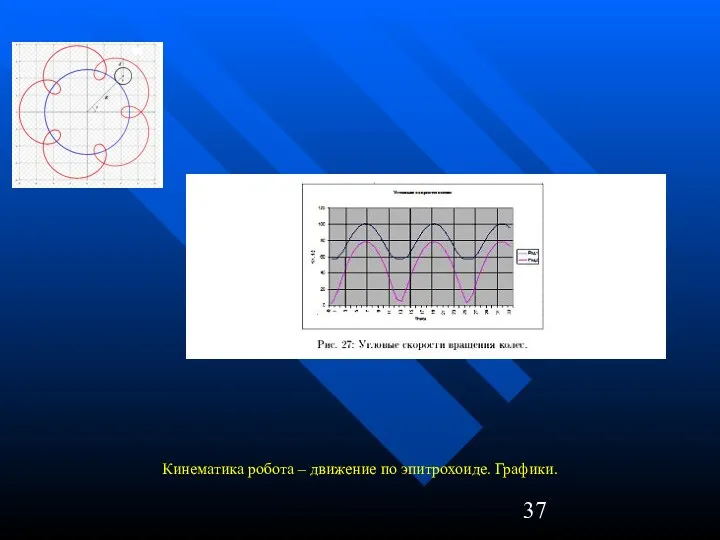
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
Кинематика робота – движение по эпитрохоиде. Графики.
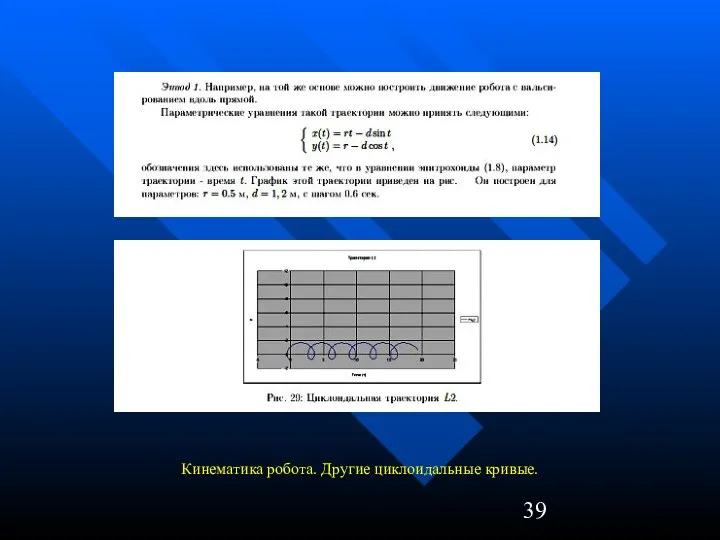
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
Кинематика робота. Другие циклоидальные кривые.
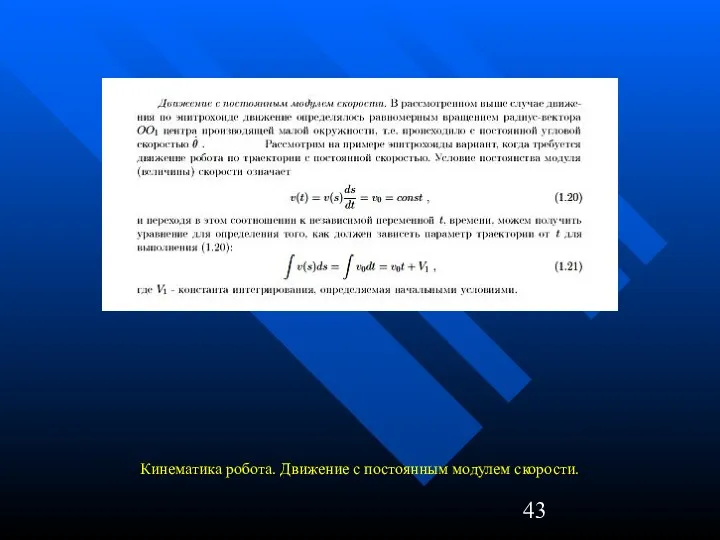
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Кинематика робота. Движение с постоянным модулем скорости. Графики.
Особенности и их разрешение.
Особенности и их разрешение.
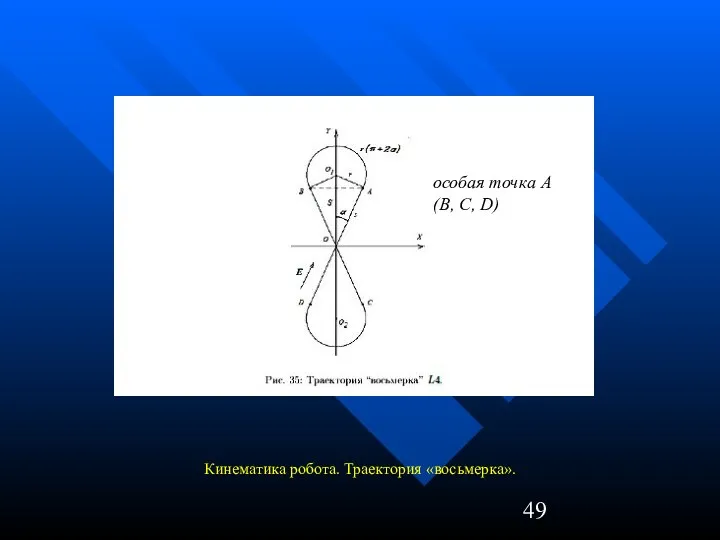
Кинематика робота. Траектория «восьмерка».
особая точка А
(B, C, D)
Кинематика робота. Траектория «восьмерка».
особая точка А
(B, C, D)
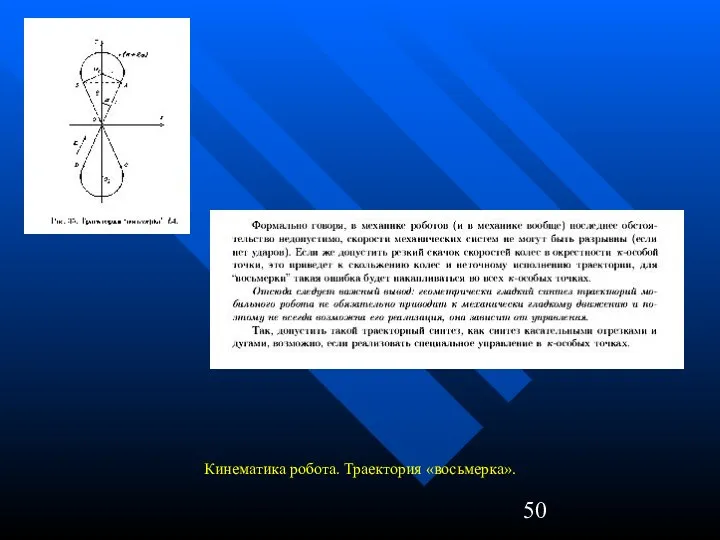
Кинематика робота. Траектория «восьмерка».
Кинематика робота. Траектория «восьмерка».
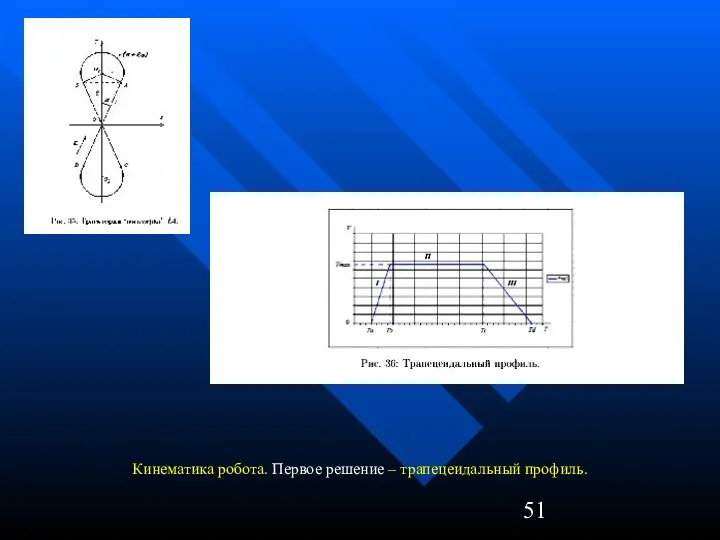
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
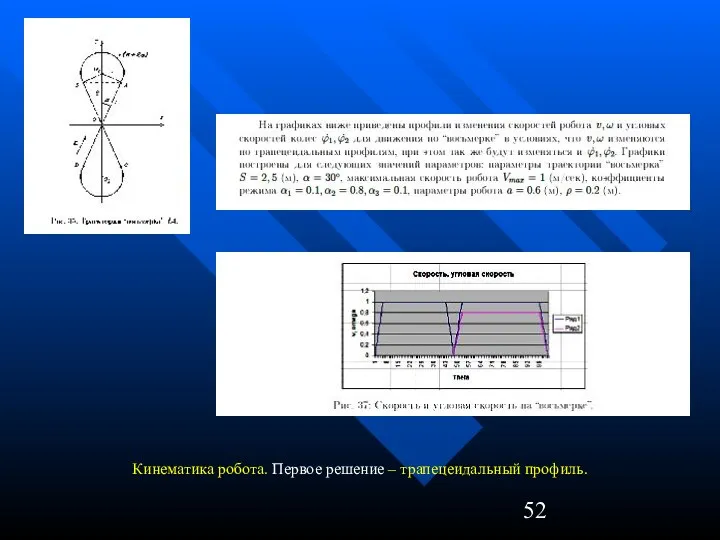
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
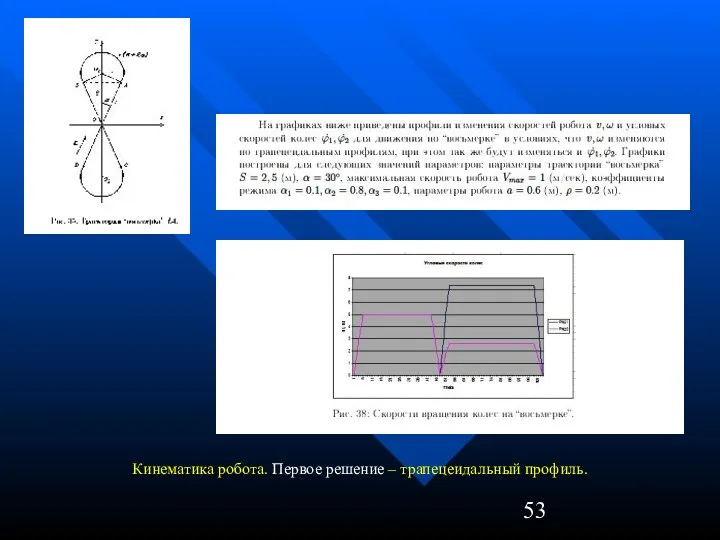
Кинематика робота. Первое решение – трапецеидальный профиль.
Кинематика робота. Первое решение – трапецеидальный профиль.
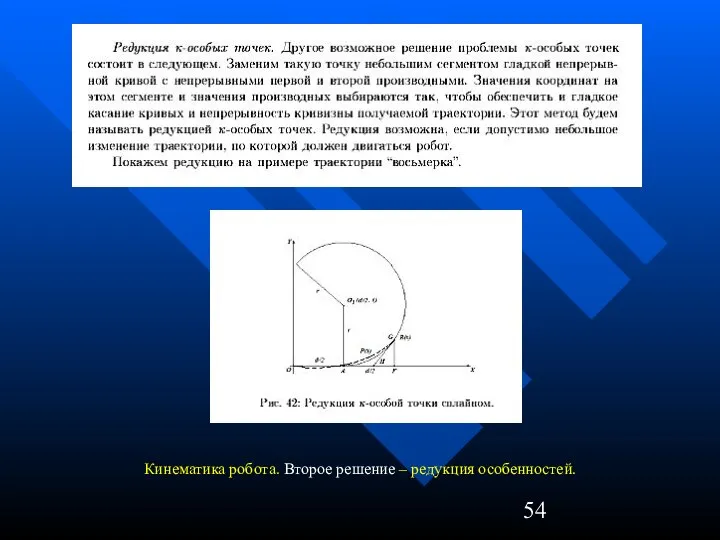
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
Кинематика робота. Второе решение – редукция особенностей.
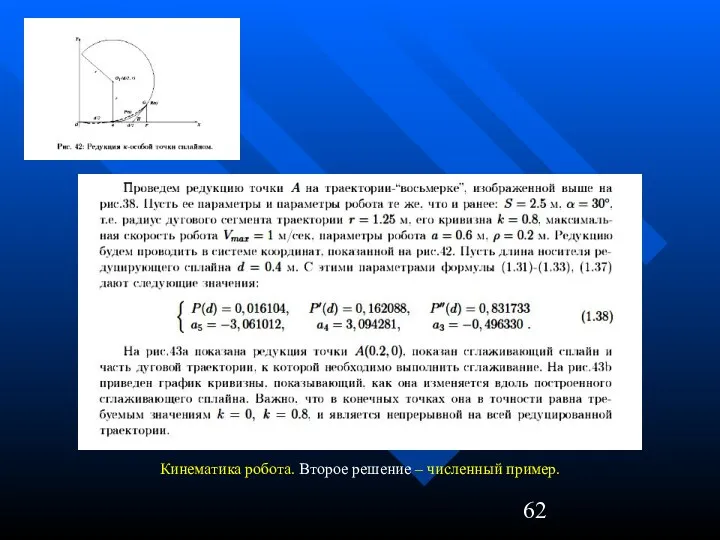
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
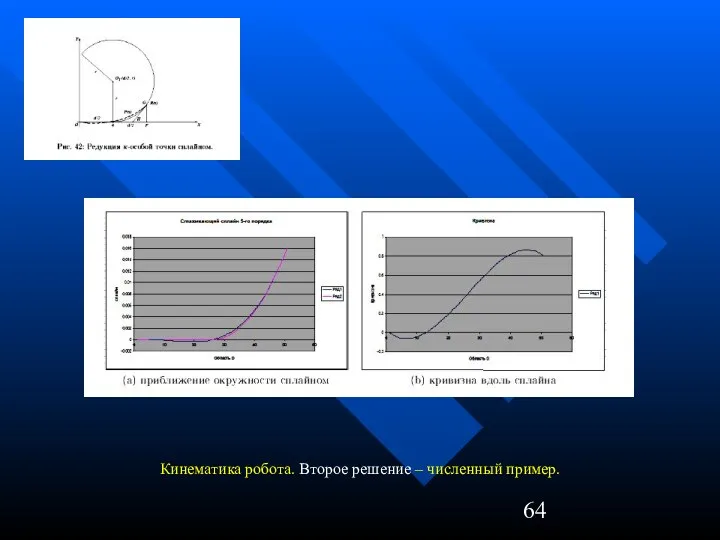
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
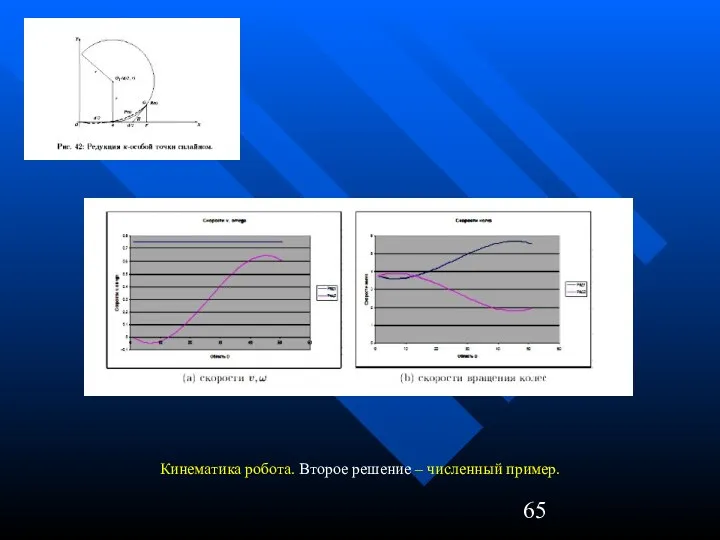
Кинематика робота. Второе решение – численный пример.
Кинематика робота. Второе решение – численный пример.
Резюме
Резюме
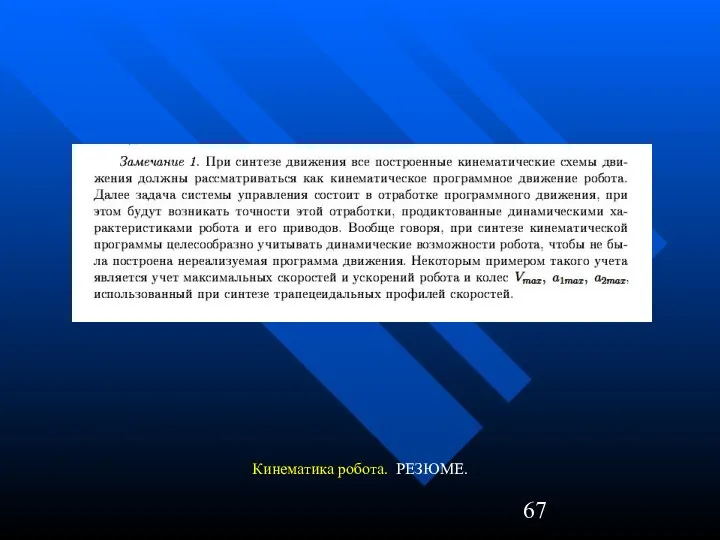
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
Кинематика робота. РЕЗЮМЕ.
 (3)
(3) Прграмма летней площадки Город Мастеров
Прграмма летней площадки Город Мастеров Рождественский сувенир
Рождественский сувенир Аккумуляторы будущего
Аккумуляторы будущего РОСТ. Областной конкурс молодежных инновационных команд. Россия – ответственность – стратегия – технологии
РОСТ. Областной конкурс молодежных инновационных команд. Россия – ответственность – стратегия – технологии Коротко про мене
Коротко про мене Детям спички не игрушка
Детям спички не игрушка День знаний в 1 классе.
День знаний в 1 классе. практические работы
практические работы Силы трения. Трение в природе и технике
Силы трения. Трение в природе и технике Коксохимический завод в Темиртау
Коксохимический завод в Темиртау презентация калейдоскоп цветов
презентация калейдоскоп цветов Опробование месторождений полезных ископаемых
Опробование месторождений полезных ископаемых Педагогические технологии гуманистической педагогики: ролевые и деловые игры
Педагогические технологии гуманистической педагогики: ролевые и деловые игры Состав Вооруженных Сил Российской Федерации. Занятие 1
Состав Вооруженных Сил Российской Федерации. Занятие 1 Египет. Заселение территории Египта
Египет. Заселение территории Египта Деревянные конструкции
Деревянные конструкции Галогены
Галогены Зимние забавы
Зимние забавы Государственная программа развития Калининградской области Развитие транспортных систем до 2022 года
Государственная программа развития Калининградской области Развитие транспортных систем до 2022 года Холодильник
Холодильник Стихи на уроках - 5
Стихи на уроках - 5 Родительское собрание Курить – здоровью вредить.
Родительское собрание Курить – здоровью вредить. Хиросима и Нагасаки: экологические последствия
Хиросима и Нагасаки: экологические последствия Микеланджело Буонарроти, художник
Микеланджело Буонарроти, художник Поколение ЭВМ. История возникновения электронно-вычислительных машин
Поколение ЭВМ. История возникновения электронно-вычислительных машин Организация боевого дежурства в радиотехническом подразделении
Организация боевого дежурства в радиотехническом подразделении Шаблоны Сердечки
Шаблоны Сердечки