- Конструктивные особенности лифтов

Содержание
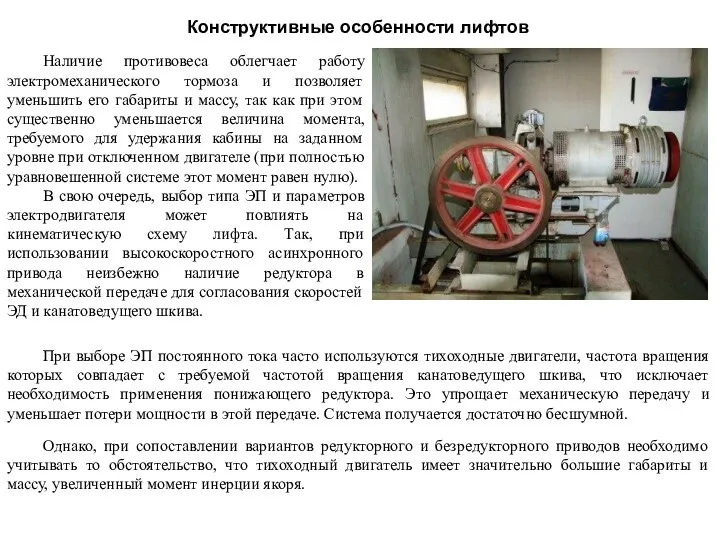
- 2. Конструктивные особенности лифтов При выборе ЭП постоянного тока часто используются тихоходные двигатели, частота вращения которых совпадает
- 3. Лебёдка может быть барабанного или фрикционного типа. В первом случае в качестве канатоведущего органа используется барабан,
- 4. Высокие требования безопасности пользования лифтом требуют наличие специального электромеханического оборудования, предупреждающее аварии и имеющее следующие элементы:
- 5. Снятие механического тормоза должно быть возможно только после создания (электрического момента, достаточного для нормального разгона электродвигателя.
- 6. Кабина снабжена специальным клещевым ловителем, который срабатывает при воздействии на рычаг РЛ. Рычаг РЛ связан с
- 7. Считается, что американец Э.Отис (1811 – 1861) изобрел лифт. Но это неверно. Отис изобрел не лифт
- 8. 1. По скорости движения: − тихоходные (скорость кабины до 0.5 м/с); − быстроходные (скорость кабины до
- 9. Для тихоходных лифтов применяют АД с кзр (иногда с фазным ротором для обеспечения необходимой плавности пуска).
- 10. Типовая диаграмма движения лифта Режим работы ЭП лифта характеризуется частыми включениями и отключениями. При этом можно
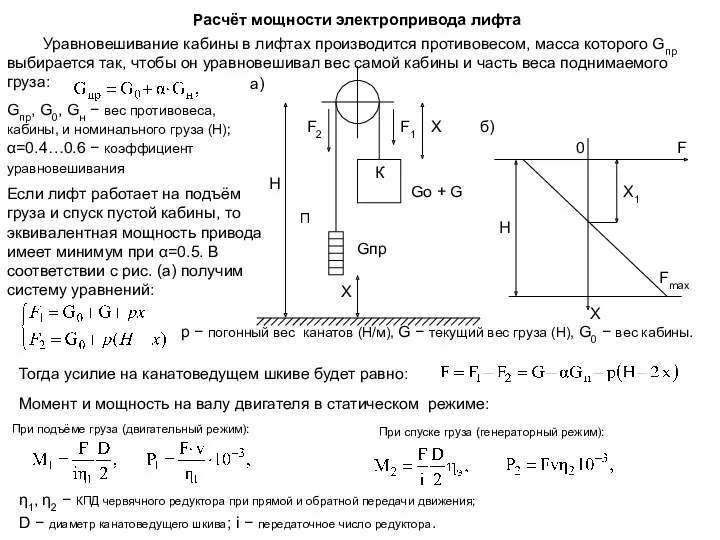
- 12. Расчёт мощности электропривода лифта Уравновешивание кабины в лифтах производится противовесом, масса которого Gпр выбирается так, чтобы
- 13. Расчёт мощности электропривода лифта Величины и знак усилия зависят от положения кабины в шахте. Если кабина
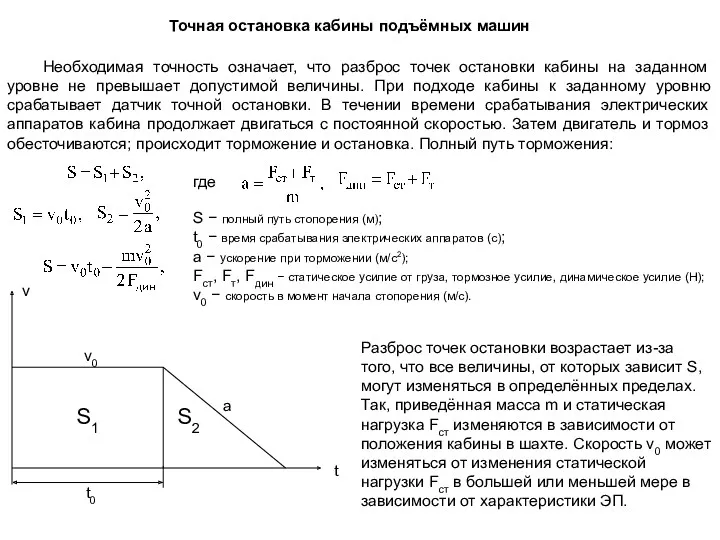
- 14. Точная остановка кабины подъёмных машин Необходимая точность означает, что разброс точек остановки кабины на заданном уровне
- 15. Точная остановка кабины подъёмных машин В соответствии с теорией ошибок максимальное отклонение тормозного пути от среднего
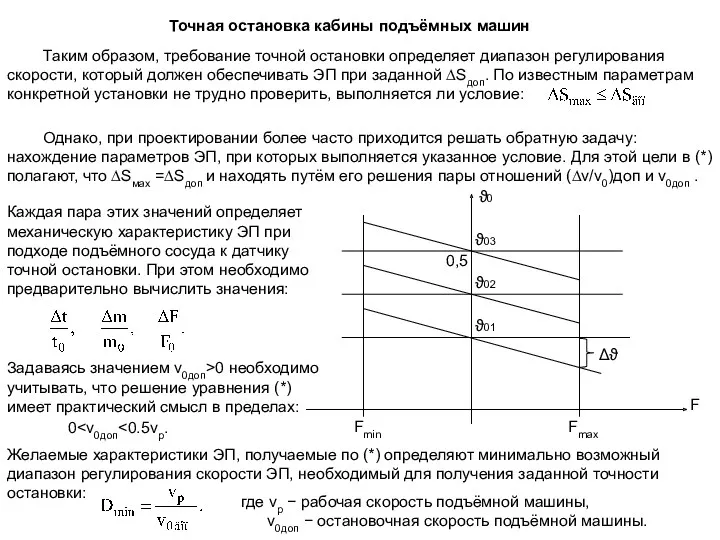
- 16. Точная остановка кабины подъёмных машин Таким образом, требование точной остановки определяет диапазон регулирования скорости, который должен
- 17. Основные схемы управления лифтами Схема управления лифта включает в себя следующие узлы: - формирование информации о
- 18. Простейший и наиболее распространённый селектор − это совокупность размещаемых на каждом этаже этажных трёхпозиционных переключателей. Эти
- 19. Схема управления двухскоростным лифтом с использованием этажных переключателей Низкая рабочая скорость тихоходных лифтов позволяет обеспечить необходимую
- 20. Схема управления двухскоростным лифтом с использованием этажных переключателей Для быстроходных лифтов со скоростью до 1 м/с
- 21. Схема управления двухскоростным лифтом с использованием этажных переключателей Управление ЭР производится путём нажатия кнопки «Вызов» на
- 22. Схема управления двухскоростным лифтом с использованием этажных переключателей На каждой этажной площадке имеется катушка вызова кабины
- 23. Замкнутые системы регулирования ЭП высокоскоростных лифтов. Функциональная схема управления лифтом Останкинской телебашни Описанные лифты с асинхронным
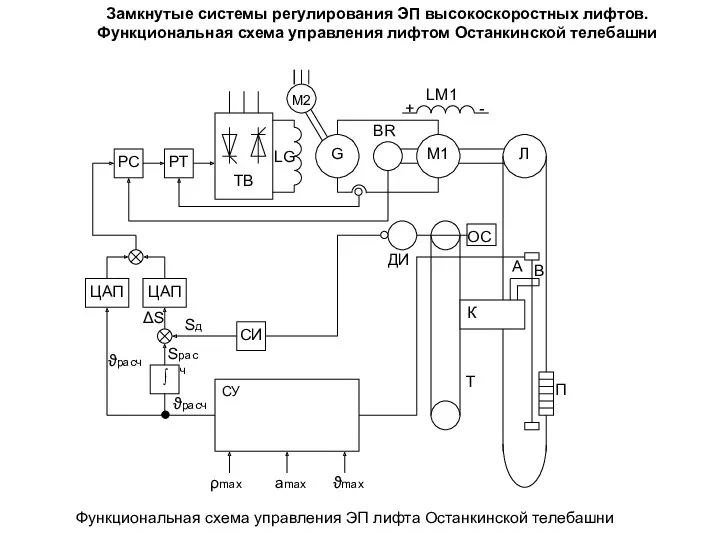
- 24. Замкнутые системы регулирования ЭП высокоскоростных лифтов. Функциональная схема управления лифтом Останкинской телебашни Функциональная схема управления ЭП
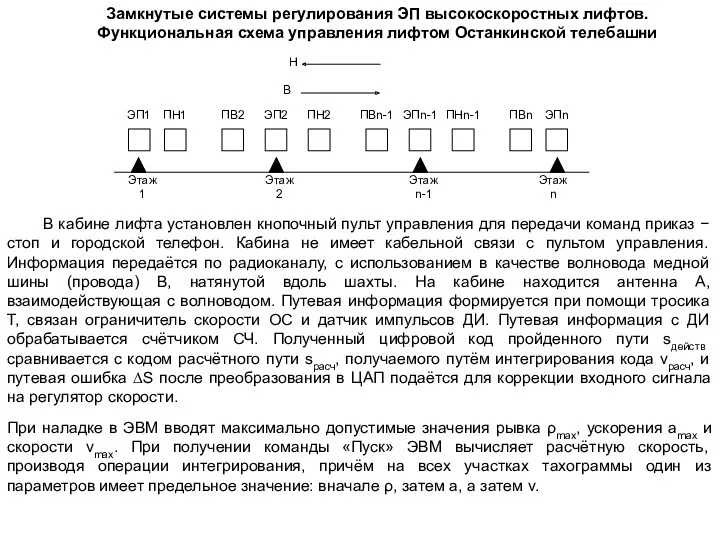
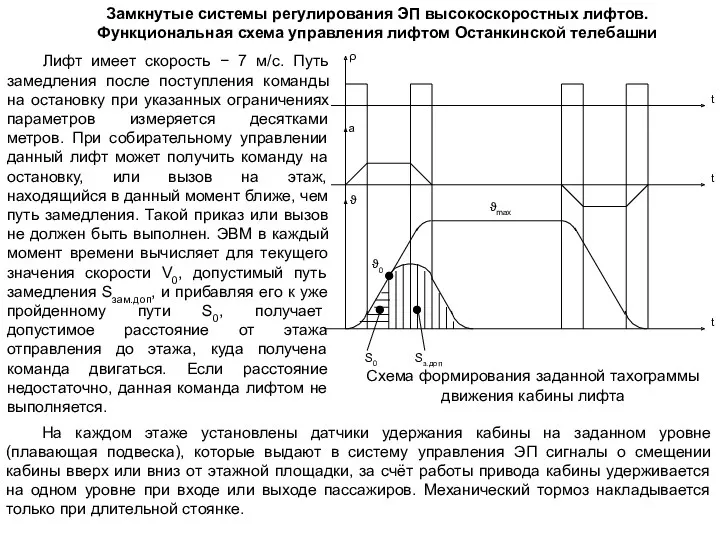
- 25. Замкнутые системы регулирования ЭП высокоскоростных лифтов. Функциональная схема управления лифтом Останкинской телебашни В кабине лифта установлен
- 26. Замкнутые системы регулирования ЭП высокоскоростных лифтов. Функциональная схема управления лифтом Останкинской телебашни На каждом этаже установлены
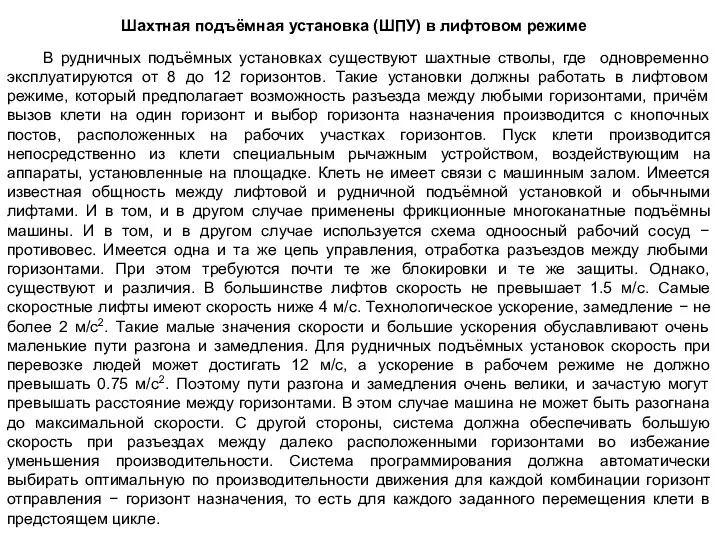
- 29. Шахтная подъёмная установка (ШПУ) в лифтовом режиме В рудничных подъёмных установках существуют шахтные стволы, где одновременно
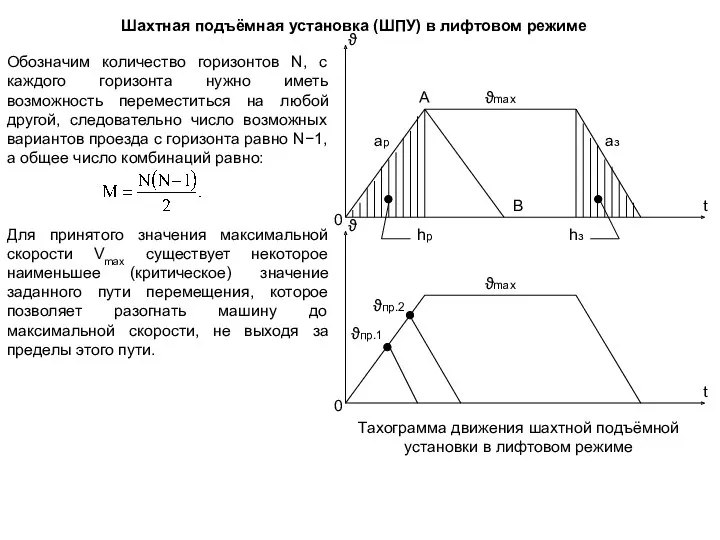
- 30. Шахтная подъёмная установка (ШПУ) в лифтовом режиме Тахограмма движения шахтной подъёмной установки в лифтовом режиме Обозначим
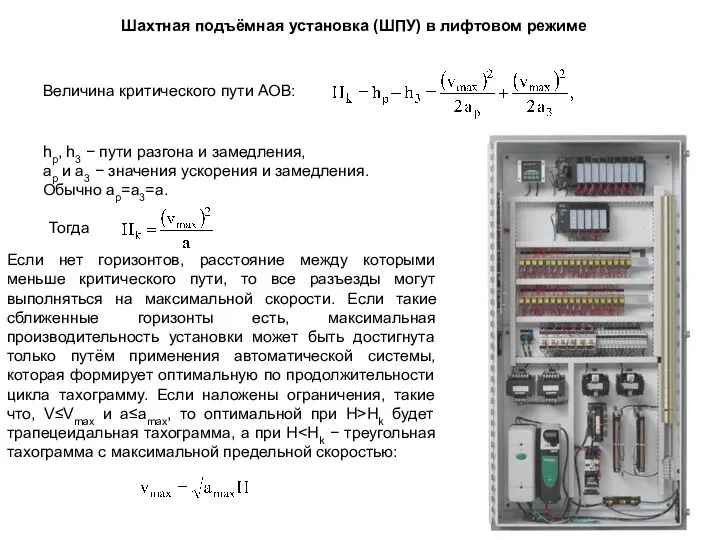
- 31. Шахтная подъёмная установка (ШПУ) в лифтовом режиме Если нет горизонтов, расстояние между которыми меньше критического пути,
- 36. Скачать презентацию
Конструктивные особенности лифтов
При выборе ЭП постоянного тока часто используются тихоходные
Конструктивные особенности лифтов
При выборе ЭП постоянного тока часто используются тихоходные

Лебёдка может быть барабанного или фрикционного типа. В первом случае в
Лебёдка может быть барабанного или фрикционного типа. В первом случае в
Высокие требования безопасности пользования лифтом требуют наличие специального электромеханического оборудования, предупреждающее
Высокие требования безопасности пользования лифтом требуют наличие специального электромеханического оборудования, предупреждающее
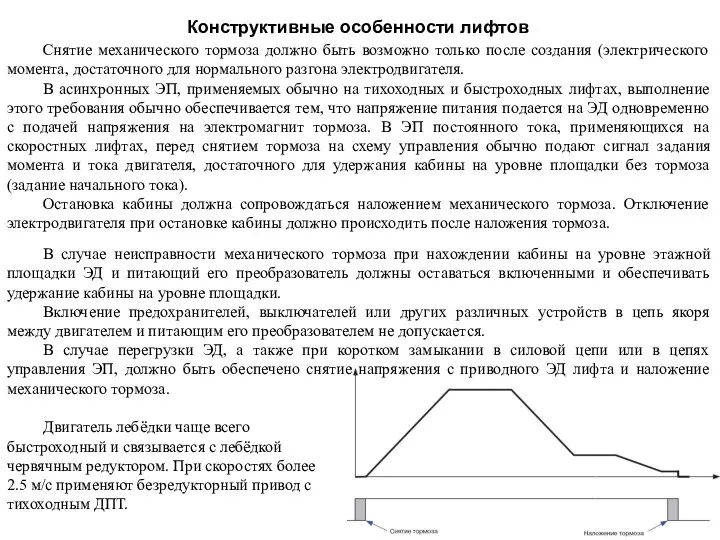
Снятие механического тормоза должно быть возможно только после создания (электрического момента,
Снятие механического тормоза должно быть возможно только после создания (электрического момента,
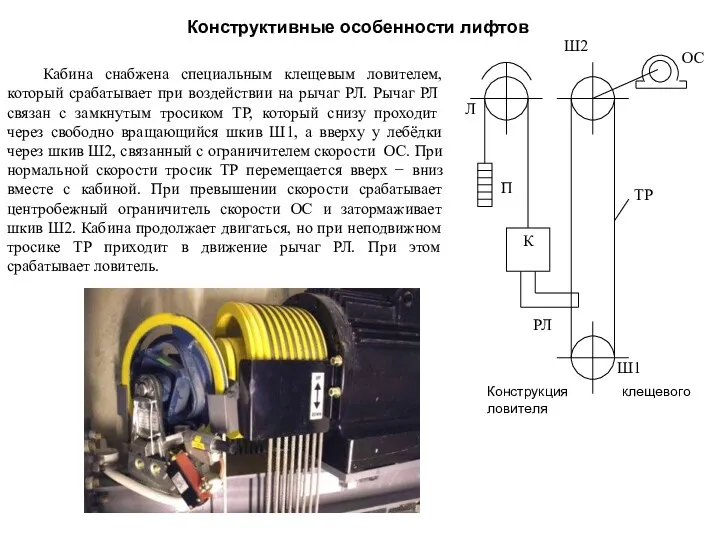
Кабина снабжена специальным клещевым ловителем, который срабатывает при воздействии на рычаг
Кабина снабжена специальным клещевым ловителем, который срабатывает при воздействии на рычаг
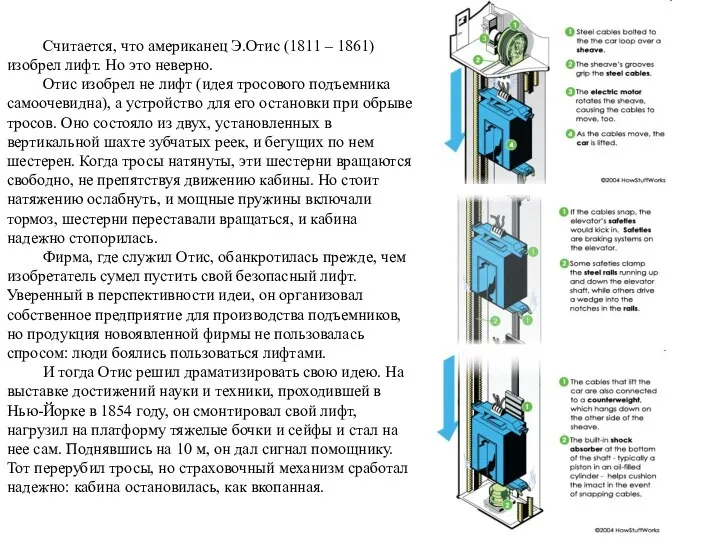
Считается, что американец Э.Отис (1811 – 1861) изобрел лифт. Но это
Считается, что американец Э.Отис (1811 – 1861) изобрел лифт. Но это
1. По скорости движения:
− тихоходные (скорость кабины до 0.5 м/с);
− быстроходные
− тихоходные (скорость кабины до 0.5 м/с);
− быстроходные
Для тихоходных лифтов применяют АД с кзр (иногда с фазным ротором
Для тихоходных лифтов применяют АД с кзр (иногда с фазным ротором
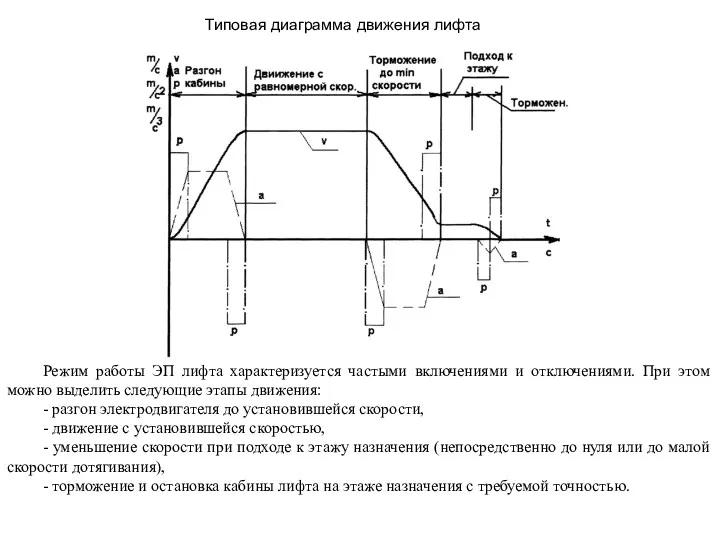
Типовая диаграмма движения лифта
Режим работы ЭП лифта характеризуется частыми включениями и
Типовая диаграмма движения лифта
Режим работы ЭП лифта характеризуется частыми включениями и

Расчёт мощности электропривода лифта
Уравновешивание кабины в лифтах производится противовесом, масса
Расчёт мощности электропривода лифта
Уравновешивание кабины в лифтах производится противовесом, масса
Расчёт мощности электропривода лифта
Величины и знак усилия зависят от положения
Расчёт мощности электропривода лифта
Величины и знак усилия зависят от положения
Точная остановка кабины подъёмных машин
Необходимая точность означает, что разброс точек
Точная остановка кабины подъёмных машин
Необходимая точность означает, что разброс точек
Точная остановка кабины подъёмных машин
В соответствии с теорией ошибок максимальное
Точная остановка кабины подъёмных машин
В соответствии с теорией ошибок максимальное
Точная остановка кабины подъёмных машин
Таким образом, требование точной остановки определяет
Точная остановка кабины подъёмных машин
Таким образом, требование точной остановки определяет
Основные схемы управления лифтами
Схема управления лифта включает в себя следующие
Основные схемы управления лифтами
Схема управления лифта включает в себя следующие
Простейший и наиболее распространённый селектор − это совокупность размещаемых на каждом
Простейший и наиболее распространённый селектор − это совокупность размещаемых на каждом
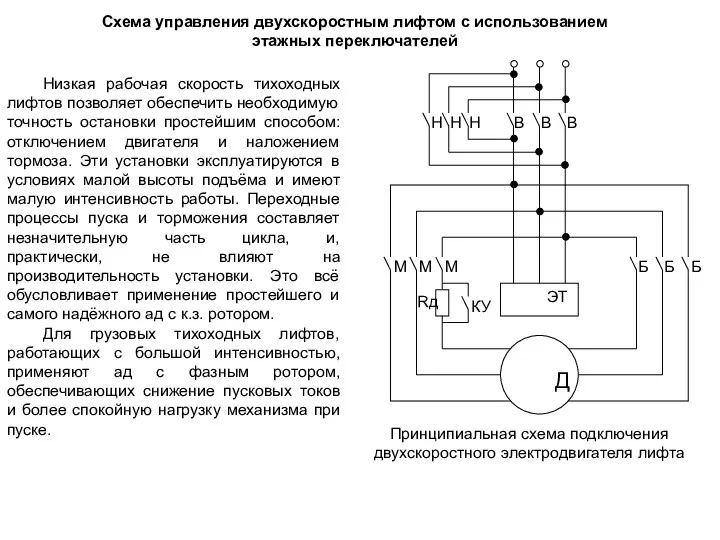
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Низкая рабочая скорость
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Низкая рабочая скорость
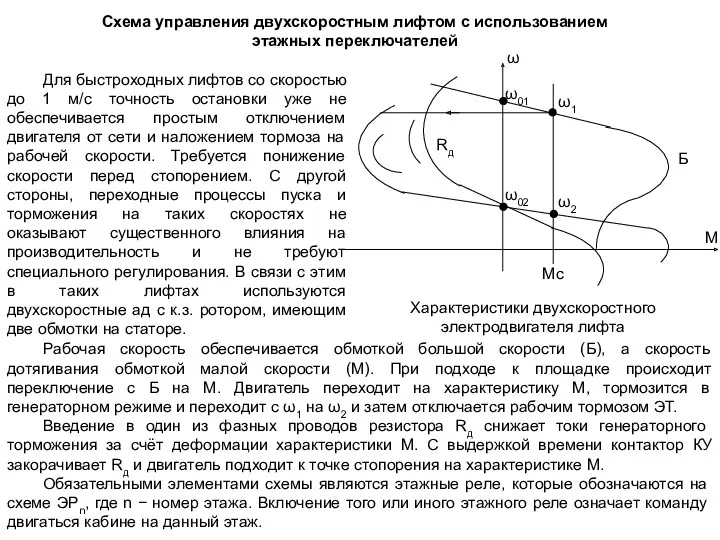
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Для быстроходных лифтов
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Для быстроходных лифтов
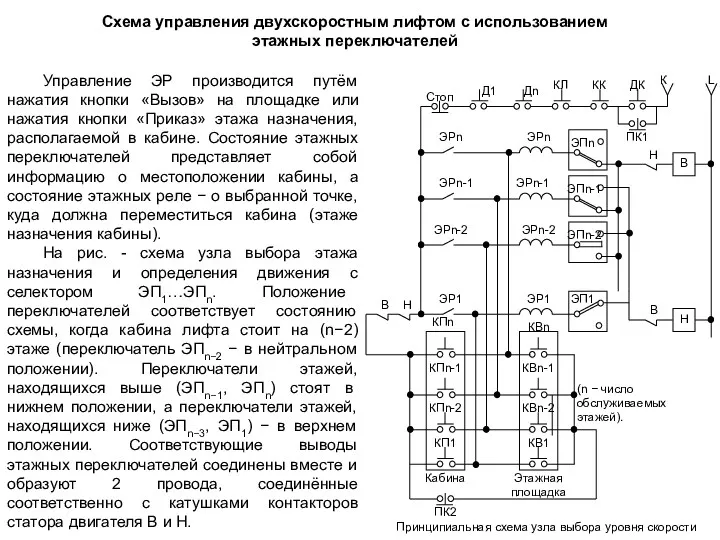
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Управление ЭР производится
Схема управления двухскоростным лифтом с использованием
этажных переключателей
Управление ЭР производится
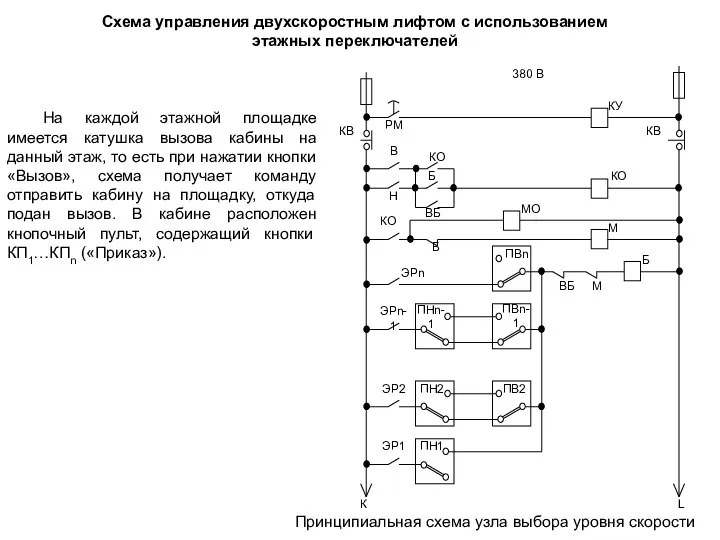
Схема управления двухскоростным лифтом с использованием
этажных переключателей
На каждой этажной
Схема управления двухскоростным лифтом с использованием
этажных переключателей
На каждой этажной
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской
Замкнутые системы регулирования ЭП высокоскоростных лифтов.
Функциональная схема управления лифтом Останкинской

Шахтная подъёмная установка (ШПУ) в лифтовом режиме
В рудничных подъёмных установках
Шахтная подъёмная установка (ШПУ) в лифтовом режиме
В рудничных подъёмных установках
Шахтная подъёмная установка (ШПУ) в лифтовом режиме
Тахограмма движения шахтной подъёмной
Шахтная подъёмная установка (ШПУ) в лифтовом режиме
Тахограмма движения шахтной подъёмной
Шахтная подъёмная установка (ШПУ) в лифтовом режиме
Если нет горизонтов, расстояние
Шахтная подъёмная установка (ШПУ) в лифтовом режиме
Если нет горизонтов, расстояние



 Презентации к курсу Химия и питание
Презентации к курсу Химия и питание Виды литья. Оборудование, инструмент и вспомогательные материалы, применяемые для литья. (Лекция 7.1)
Виды литья. Оборудование, инструмент и вспомогательные материалы, применяемые для литья. (Лекция 7.1) ВА_Лекц_1
ВА_Лекц_1 Система принципов дидактики
Система принципов дидактики Легкоатлеты России
Легкоатлеты России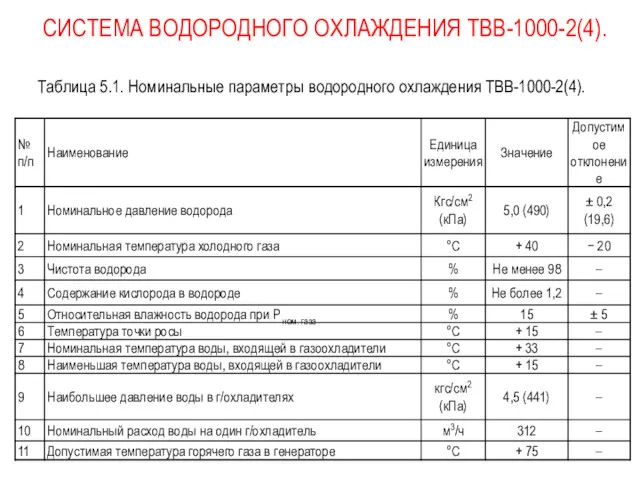 Системы газового охлаждения ТВВ-1000-2(4)
Системы газового охлаждения ТВВ-1000-2(4) Электронный букварь. Учимся читать
Электронный букварь. Учимся читать Игра-презентация Дифференциация б-п
Игра-презентация Дифференциация б-п Злой волшебник табак
Злой волшебник табак Древняя Индия
Древняя Индия Стабилизаторы (2)
Стабилизаторы (2) ДИКАЯ ПРИРОДА РОССИИ
ДИКАЯ ПРИРОДА РОССИИ Наследственные болезни
Наследственные болезни Мой край родной - Башкортостан
Мой край родной - Башкортостан Правоохранительные органы
Правоохранительные органы Экологиялық білім, тарбие және мәдениеттілік негіздерін қалыптастыру
Экологиялық білім, тарбие және мәдениеттілік негіздерін қалыптастыру Розкол в українській православній церкві та шляхи його подолання (11 клас)
Розкол в українській православній церкві та шляхи його подолання (11 клас) Святые места Ростовской области как фактор развития туризма
Святые места Ростовской области как фактор развития туризма Игра 100 к 1
Игра 100 к 1 Модель обучения в ОАО МЦТ
Модель обучения в ОАО МЦТ Кроссворд ,,Метро” Николай Носов
Кроссворд ,,Метро” Николай Носов Тульский кремль в историческом центре Тулы
Тульский кремль в историческом центре Тулы Повышение качества знаний учащихся через развитие познавательного интереса на уроках математики.
Повышение качества знаний учащихся через развитие познавательного интереса на уроках математики. Презентация Жемчужина Каспия.
Презентация Жемчужина Каспия. Ткачество Диск
Ткачество Диск Музейно-этнографическая деятельность ДОУ, как средство социализации ребенка-дошкольника в современном мире
Музейно-этнографическая деятельность ДОУ, как средство социализации ребенка-дошкольника в современном мире Заболевания органов дыхания у детей
Заболевания органов дыхания у детей Барокко – стиль архитектурного искусства
Барокко – стиль архитектурного искусства