- Координаты и векторы

Содержание
- 2. ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ Прямоугольная система координат — прямолинейная система координат с взаимно перпендикулярными осями на плоскости
- 3. Расстояние между двумя точками:A1(x1;y1) и A2(x2;y2) в прямоугольной системе координат выражается формулой: d= √(x2 - x1)2
- 4. УРАВНЕНИЕ СФЕРЫ Пусть центр сферы находится в точке A (a; b; c), а радиус сферы равен
- 5. Вектором называют направленный отрезок. А - начало вектора, В-конец вектора. Вектор обозначается a или AB. Абсолютной
- 6. Геометрическая интерпретация. Произведение ненулевого вектора на число - это вектор, коллинеарный данному (сонаправленный данному, если число
- 7. УГОЛ МЕЖДУ ВЕКТОРАМИ Углом между двумя векторами, отложенными от одной точки, называется кратчайший угол, на который
- 8. ФОРМУЛА ВЫЧИСЛЕНИЯ УГЛА МЕЖДУ ВЕКТОРАМИ: — cos α = a·b |a|·|b|
- 9. Проекцией вектора а на координатную ось называют длину отрезка между проекциями начала и конца вектора а
- 11. Скачать презентацию
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
Прямоугольная система координат — прямолинейная система координат с взаимно
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
Прямоугольная система координат — прямолинейная система координат с взаимно
Расстояние между двумя точками:A1(x1;y1) и A2(x2;y2) в прямоугольной системе координат выражается
Расстояние между двумя точками:A1(x1;y1) и A2(x2;y2) в прямоугольной системе координат выражается
УРАВНЕНИЕ СФЕРЫ
Пусть центр сферы находится в точке A (a; b;
УРАВНЕНИЕ СФЕРЫ
Пусть центр сферы находится в точке A (a; b;
Вектором называют направленный отрезок. А - начало вектора, В-конец вектора.
Вектор
Вектором называют направленный отрезок. А - начало вектора, В-конец вектора. Вектор
Геометрическая интерпретация.
Произведение ненулевого вектора на число - это вектор, коллинеарный
Геометрическая интерпретация.
Произведение ненулевого вектора на число - это вектор, коллинеарный
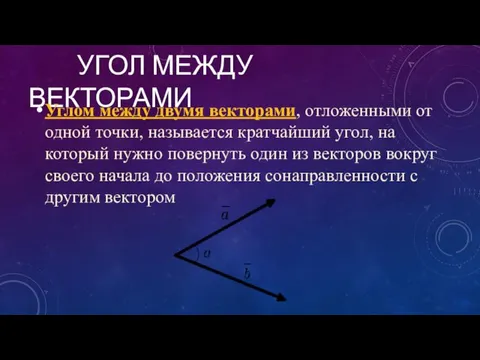
УГОЛ МЕЖДУ ВЕКТОРАМИ
Углом между двумя векторами, отложенными от одной
УГОЛ МЕЖДУ ВЕКТОРАМИ
Углом между двумя векторами, отложенными от одной
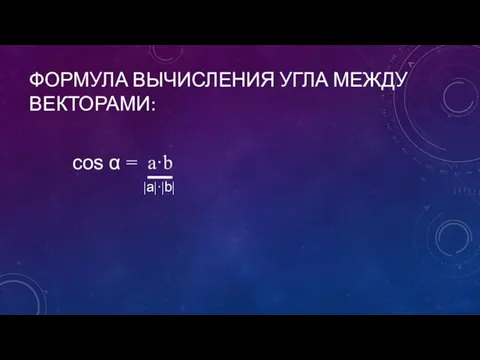
ФОРМУЛА ВЫЧИСЛЕНИЯ УГЛА МЕЖДУ ВЕКТОРАМИ:
—
cos α = a·b
|a|·|b|
ФОРМУЛА ВЫЧИСЛЕНИЯ УГЛА МЕЖДУ ВЕКТОРАМИ:
—
cos α = a·b
|a|·|b|
Проекцией вектора а на координатную ось называют длину отрезка между проекциями
Проекцией вектора а на координатную ось называют длину отрезка между проекциями
 Умники и умницы
Умники и умницы Классификация компьютерных систем. Современные операционные системы
Классификация компьютерных систем. Современные операционные системы Использование цветотерапии в коррекции эмоциональной сферы детей с ЗПР
Использование цветотерапии в коррекции эмоциональной сферы детей с ЗПР Надмолекулярные структуры полимеров (НС)
Надмолекулярные структуры полимеров (НС) Укрепление общественного здоровья, Республика Коми
Укрепление общественного здоровья, Республика Коми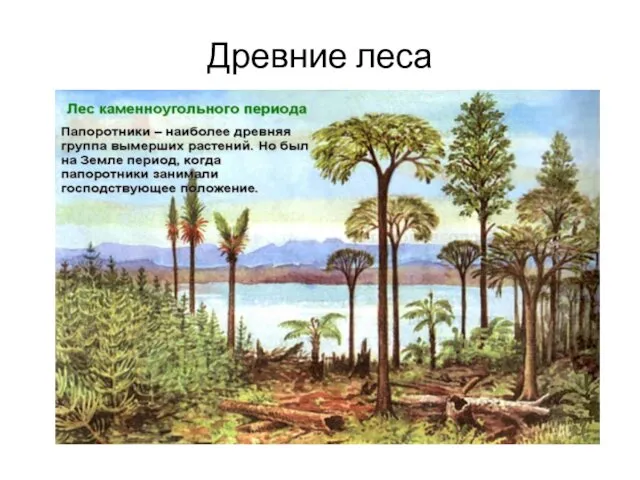 Древние леса
Древние леса Место ребенка в семье Диск
Место ребенка в семье Диск Питание здоровых и больных детей
Питание здоровых и больных детей Школьный проект Солдат моей семьи.
Школьный проект Солдат моей семьи. Простые механизмы
Простые механизмы Животные живого уголка. Задания
Животные живого уголка. Задания Конус
Конус Использование инновационной аппаратуры для оказания психиатрической и наркологической помощи населению
Использование инновационной аппаратуры для оказания психиатрической и наркологической помощи населению Средневековое государство и право в Англии
Средневековое государство и право в Англии Проектная деятельность с детьми
Проектная деятельность с детьми Презентация для проведения классного часа День Земли
Презентация для проведения классного часа День Земли Процесс почвообразования
Процесс почвообразования Основные задачи токсикологической химии в аналитической диагностике наркотических и психотропных веществ
Основные задачи токсикологической химии в аналитической диагностике наркотических и психотропных веществ Как правильно ухаживать за полостью рта. Гигиена полости рта. 2
Как правильно ухаживать за полостью рта. Гигиена полости рта. 2 Общие сведения о пунктах управления подразделениями ПВО мсп (тп) и омсбр (отбр). Занятие №1
Общие сведения о пунктах управления подразделениями ПВО мсп (тп) и омсбр (отбр). Занятие №1 Системный подход к образовательному, воспитательному и оздоровительному потенциалу обучающихся на занятиях физической культуры
Системный подход к образовательному, воспитательному и оздоровительному потенциалу обучающихся на занятиях физической культуры Начало движения, маневрирование. Часть 1
Начало движения, маневрирование. Часть 1 Высокоскоростной железнодорожный транспотр и его место в современных транспортных системах. Лекция 1 ч.1
Высокоскоростной железнодорожный транспотр и его место в современных транспортных системах. Лекция 1 ч.1 Мастерская Третье измерение. Наноград, Сочи 2017. День 2-3
Мастерская Третье измерение. Наноград, Сочи 2017. День 2-3 Комплексное развитие сельских территорий Россельхозбанк
Комплексное развитие сельских территорий Россельхозбанк Башни эмоций. Урок 8
Башни эмоций. Урок 8 Д. Дефо Робинзон Крузо: характер героя. 5 класс
Д. Дефо Робинзон Крузо: характер героя. 5 класс Крепление ГКЛ по деревянному каркасу. Разделка поверхностей набрызгом по клеевой окраске кистью
Крепление ГКЛ по деревянному каркасу. Разделка поверхностей набрызгом по клеевой окраске кистью