Кутомірні радіотехнічні засоби. Автоматичний радіопеленгатор АРП-11 (тема №4, заняття 2) презентация
- Кутомірні радіотехнічні засоби. Автоматичний радіопеленгатор АРП-11 (тема №4, заняття 2)

Содержание
- 2. ЗМІСТ ЗАНЯТТЯ Вступна частина Основна частина 1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11. 2. Структурна
- 3. 1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
- 4. Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та дециметрового діапазонів хвиль, автоматичної індикації
- 5. До складу радіопеленгатора входять: апаратна; антенно - мачтовий пристрій (АМП); виносна апаратура (ВА); контрольно-випробувальний генератор (КВГ)
- 6. До складу апаратної входять також система вентиляції, пожежної сигналізації та світло огородження. Система вентиляції складається з
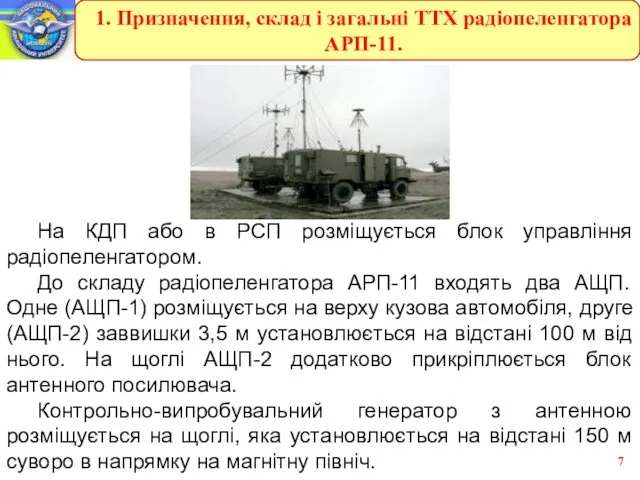
- 7. На КДП або в РСП розміщується блок управління радіопеленгатором. До складу радіопеленгатора АРП-11 входять два АЩП.
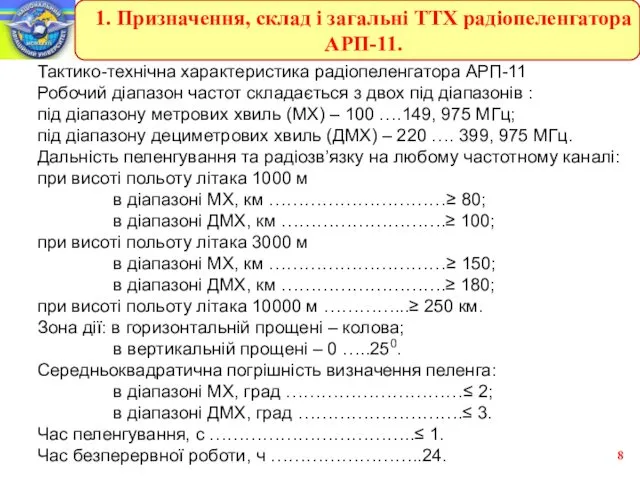
- 8. Тактико-технічна характеристика радіопеленгатора АРП-11 Робочий діапазон частот складається з двох під діапазонів : під діапазону метрових
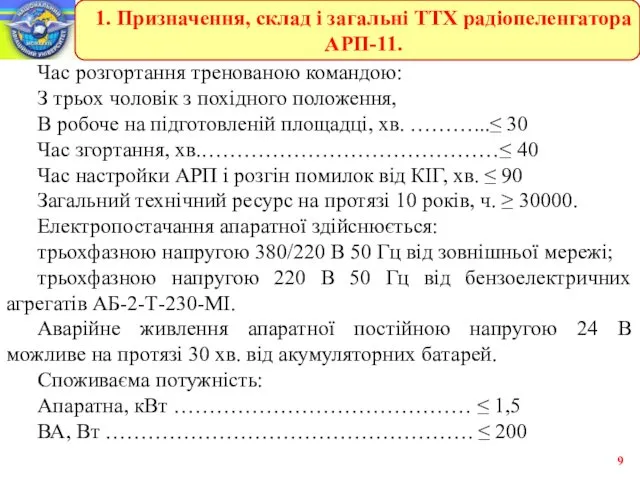
- 9. Час розгортання тренованою командою: З трьох чоловік з похідного положення, В робоче на підготовленій площадці, хв.
- 10. Умови експлуатації: температура оточуючого середовища, рад …….- 50 …50 відносна вологість повітря при температурі 35 0С,
- 11. 2. Структурна схема і принцип дії радіопеленгатора АРП-11.
- 12. Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з електронним скануванням діаграми спрямованості антени вигляду кардіоїди.
- 13. Структурна схема радіопеленгатора АРП-11
- 14. За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом сигналів від пеленгованої радіостанції. Генератором опорної напруги
- 15. АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості антени (ДСА) типу кардіоїди. Електронне сканування
- 16. Скориставшись відомою тригонометричною формулою можна отримати вираз: Як випливає з останнього виразу, бажаний ефект може бути
- 17. Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним скануванням ДСА типу кардіоїди можна подати у
- 18. Сигнал із неспрямованої антени у вигляді напруги u1(t) і сигнали з виходів балансових модуляторів БМ1 і
- 19. У фазових радіопеленгаторах з механічним і електронним скануванням ДСА може бути застосована як одноканальна, так і
- 21. Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну АМ-коливання та містить у своїй фазі інформацію
- 22. Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за допомогою вбудованого калібратора. Вихідні напруги ФД кожного
- 24. Скачать презентацию
ЗМІСТ ЗАНЯТТЯ
Вступна частина
Основна частина
1. Призначення, склад і загальні
ЗМІСТ ЗАНЯТТЯ
Вступна частина
Основна частина
1. Призначення, склад і загальні
1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та
Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та
До складу радіопеленгатора входять:
апаратна;
антенно - мачтовий пристрій (АМП);
виносна апаратура (ВА);
контрольно-випробувальний генератор
До складу радіопеленгатора входять:
апаратна;
антенно - мачтовий пристрій (АМП);
виносна апаратура (ВА);
контрольно-випробувальний генератор
До складу апаратної входять також система вентиляції, пожежної сигналізації та світло
До складу апаратної входять також система вентиляції, пожежної сигналізації та світло
На КДП або в РСП розміщується блок управління радіопеленгатором.
До складу радіопеленгатора
На КДП або в РСП розміщується блок управління радіопеленгатором.
До складу радіопеленгатора
Тактико-технічна характеристика радіопеленгатора АРП-11
Робочий діапазон частот складається з двох під
Тактико-технічна характеристика радіопеленгатора АРП-11
Робочий діапазон частот складається з двох під
Час розгортання тренованою командою:
З трьох чоловік з похідного положення,
В робоче на
Час розгортання тренованою командою:
З трьох чоловік з похідного положення,
В робоче на
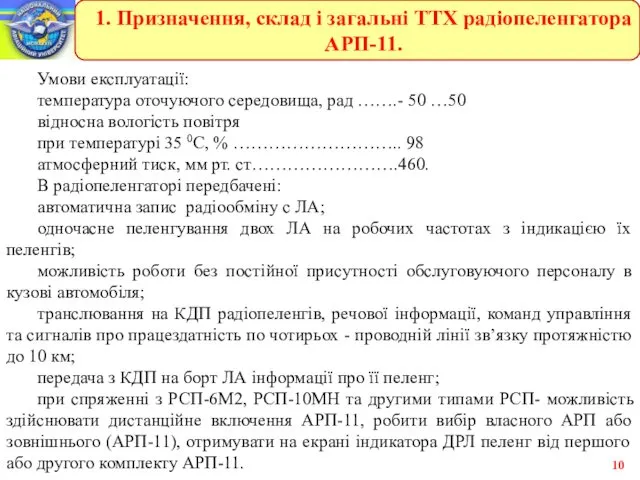
Умови експлуатації:
температура оточуючого середовища, рад …….- 50 …50
відносна вологість повітря
при температурі
Умови експлуатації:
температура оточуючого середовища, рад …….- 50 …50
відносна вологість повітря
при температурі
2. Структурна схема і принцип дії радіопеленгатора АРП-11.
2. Структурна схема і принцип дії радіопеленгатора АРП-11.
Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з
Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з
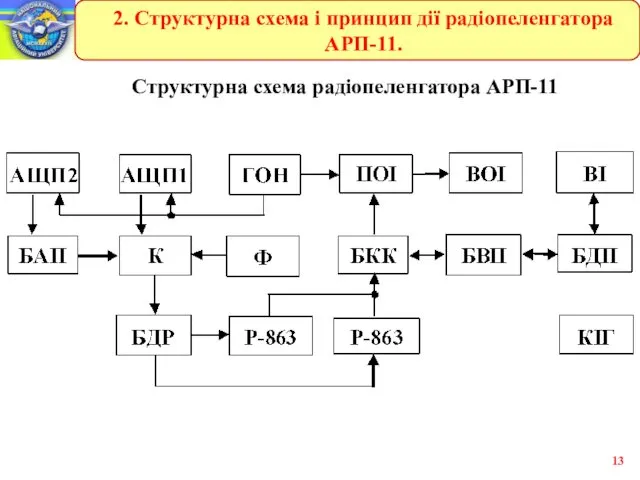
Структурна схема радіопеленгатора АРП-11
Структурна схема радіопеленгатора АРП-11
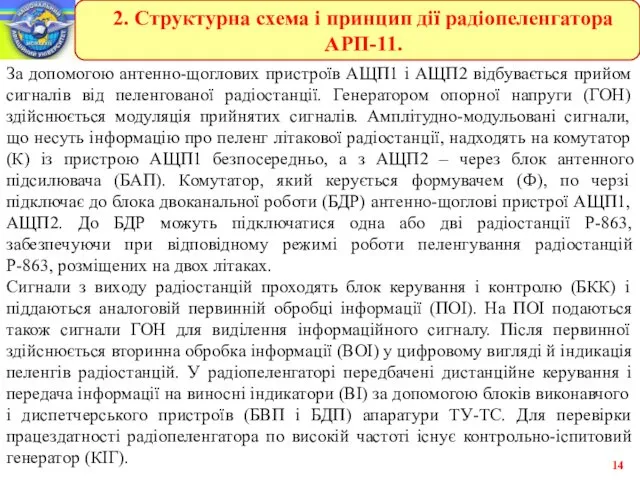
За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом
За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом
АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості
АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості
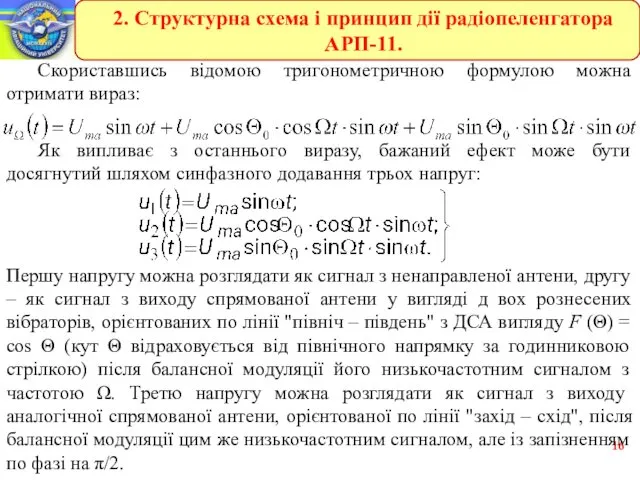
Скориставшись відомою тригонометричною формулою можна отримати вираз:
Як випливає з
Скориставшись відомою тригонометричною формулою можна отримати вираз:
Як випливає з
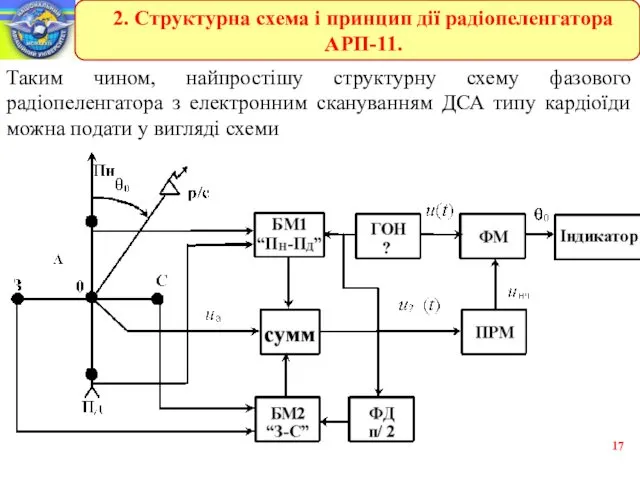
Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним
Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним
Сигнал із неспрямованої антени у вигляді напруги u1(t) і
Сигнал із неспрямованої антени у вигляді напруги u1(t) і
У фазових радіопеленгаторах з механічним і електронним скануванням ДСА
У фазових радіопеленгаторах з механічним і електронним скануванням ДСА

Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну
Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну
Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за
Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за
 Источник 1 (глаголь22.рф)
Источник 1 (глаголь22.рф) Область познания-экспериментирование
Область познания-экспериментирование Алгоритм решения генетических задач
Алгоритм решения генетических задач Көбіктер және оларды алу әдістері
Көбіктер және оларды алу әдістері Социально-педагогические технологии консультирования
Социально-педагогические технологии консультирования моя презентация
моя презентация Родительское собрание на тему ФГОСы
Родительское собрание на тему ФГОСы Наглядное пособие
Наглядное пособие Цифровые комбинационные устройства. Тема 4.2
Цифровые комбинационные устройства. Тема 4.2 Дети и война
Дети и война Морфологический анализ слова
Морфологический анализ слова Программы и фонды для мероприятия
Программы и фонды для мероприятия Обоснование параметров и разработка технических средств и технологии бурения направленных скважин из горных выработок
Обоснование параметров и разработка технических средств и технологии бурения направленных скважин из горных выработок Презентация к вводному занятию Волшебная страна бисера.
Презентация к вводному занятию Волшебная страна бисера. Самостійна робота учнів - засіб розвитку пізнавальної активності і творчого мислення
Самостійна робота учнів - засіб розвитку пізнавальної активності і творчого мислення Кәмпит бұл-қанттан
Кәмпит бұл-қанттан Сказка о том, как Лягушонок научился гудеть, как пароход. Постановка и автоматизация звука [Ы]
Сказка о том, как Лягушонок научился гудеть, как пароход. Постановка и автоматизация звука [Ы] What is Marketing Management?
What is Marketing Management? Реализация мероприятий в области информационных технологий
Реализация мероприятий в области информационных технологий Речевые игры для детей от 3-х лет.
Речевые игры для детей от 3-х лет. Виниловые обои
Виниловые обои презентация Службы района
презентация Службы района Keys_Poklevochka_1
Keys_Poklevochka_1 Синичкин день. Народный календарь.
Синичкин день. Народный календарь. Применение данных каротажа в процессе бурения с использованием комплексных приборов LWD121-2ННК-ГГКЛП и LWD172-2ННК-ГГКЛП-3Г
Применение данных каротажа в процессе бурения с использованием комплексных приборов LWD121-2ННК-ГГКЛП и LWD172-2ННК-ГГКЛП-3Г Страшный суд
Страшный суд Назначение и устройство токарно-винторезного станка ТВ-6
Назначение и устройство токарно-винторезного станка ТВ-6 Проблемы российского образования в современных условиях
Проблемы российского образования в современных условиях