- lec1

Содержание
- 2. Курс лекций по дисциплине Механика.Теории механизмов и машин, детали машин и основы конструирования. Версия 1.0., 2005
- 3. При подготовке материала использован многолетний опыт работы автора и его коллег по совместной учёбе и работе.
- 4. Теория механизмов и машин: Учебник для втузов .К. В. Фролов, С. А. Попов, А.К. Мусатов и
- 5. 1. Иосилевич Г.Б. Детали машин. -М.: Машино- строение, 1988. - 368 с. 2. Ю.Дунаев П.Ф., Леликов
- 6. В процессе изучения курса знакомьтесь с пакетами. Для этого необходимо выйти на экран рабочего стола, выбрать
- 7. Модуль 1 Введение. Структура механизмов 1. Входной тестовый контроль к модулю1. 2. Лекции 1: 1.1. Введение.
- 8. 3. Лабораторные работы: 3.2. Структурный анализ механизмов (на моделях). 3.3. Структурирование схем механизмов в системе ДИНАМО.
- 9. Перечень вопросов входного контроля для модуля № 1: 1. Какая величина называется силой? 2. Какая величина
- 10. 9. Какое действие тел друг на друга называется механическим? 10. Что является мерой механического взаимо- действия
- 11. 16. Какая величина называется скоростью движения? 17. Какая величина называется ускорением движения? 18. Чему равна разность
- 12. 26. Что такое производная? 27. Какие свойства справедливы для производной? 28. Какая величина называется угловой скоростью?
- 13. 35. Какие стандартные масштабы являются масштабами увеличения? 36. Какие стандартные масштабы являются масштабами уменьшения? 37. Какая
- 14. 43. Что характеризует быстроту изменения углового перемещения тела с течением времени? 44. Что характеризует быстроту изменения
- 15. 48. Как называется движение, при котором точка в равные произвольно выбранные промежутки времени проходит равные пути?
- 16. 53. Как называется теорема, которой соответст- вует утверждение “Квадрат любой стороны произвольного треугольника равен сумме квадратов
- 17. 57. Что называется котангенсом острого угла прямоугольного треугольника? 58. Чему равна сумма углов в произвольном треугольнике?
- 18. ЛЕКЦИЯ № 1 1.1. Введение. Предметы и задачи дисциплины. 1.2. Элементы структуры механизмов. 1.2.1. Понятия: механизм,
- 19. 57. Что называется котангенсом острого угла прямоугольного треугольника? 58. Чему равна сумма углов в произвольном треугольнике?
- 20. Современное производство невозможно без самых разнообразных машин и механизмов.
- 21. 1.2.1. Понятия: механизм, машина Машина есть техническое устройство, предназначенное для механизации какого -либо процесса. Иногда понятия
- 22. В зависимости от выполняемых функций машины делятся на: Энергетические Технологические Транспортные Контрольные и управляющие Информационные Рис.
- 23. Типы машин Рис. 1.2 Гидравлические машины Рис. 1.3 Пневматические машины
- 24. Механизмы делятся на группы: 1. Преобразующие какую-либо энер-гию в механическую работу. Это меха-низмы энергетических машин: электро-двигатели,
- 25. 2. Потребляющие подводимую к ним энергию, выполняющие определенные технологические функции. Это механиз-мы различных станков, пищеобрабаты-вающих, полиграфических
- 26. Исполнительный механизм может работать только в том случае, если он соединён с двигателем. Двигатель и соединенный
- 27. Рис. 1. 4. Конструктивная схема агрегата
- 28. Рис. 1.5 Функциональная схема агрегата ДВ - двигатель ДВ РМ ПМ САУ РМ – рабочая машина
- 29. . Схема кривошипно- ползунного механизма а) конструктивная; б) кинематическая (структурная). в) структурная схема кривошипно-ползунного механизма горизонтального
- 30. На рис. 1.7 б): 1 - кривошип; 2 - шатун; 3 - ползун; 0 - стойка
- 31. Рис. 1.8 Кривошипно-ползунный механизм (крейцкопфный) Рис. 1.9 Кривошипно-ползунный механизм (тронковый) Модели механизмов
- 32. 1.2.2. Звенья и их соединения. Кинематические пары. Механизм состоит из нескольких отдельных частей, называемых звеньями. Звено
- 33. Звено, которое определяет движение других звеньев называется входным звеном (ведущим). Движение входному звену задается извне. Чаще
- 34. Особое место занимают механизмы, в кото-рых имеются промежуточные (вспомогательные) звенья. Они могут быть твёрдыми (ролики, шари-ки),
- 35. Свободное материальное тело в пространстве имеет 6 возможных независимых движений (три поступательных вдоль координатных осей x,
- 36. В механизме все звенья связаны друг с другом. Связь может быть геометрической и динамической. Связь геометрическая,
- 37. Звенья в механизме связаны друг с другом, следовательно они теряют подвижность. Каждое соединение ограничивает движение звеньев.
- 38. Кинематические пары классифицируются либо по числу наложенных условий связи, либо по числу оставшихся движений. В нашем
- 39. Класс кинематической пары определяется из зависимости: S = 6 – H. Далее на слайдах приведены кинематические
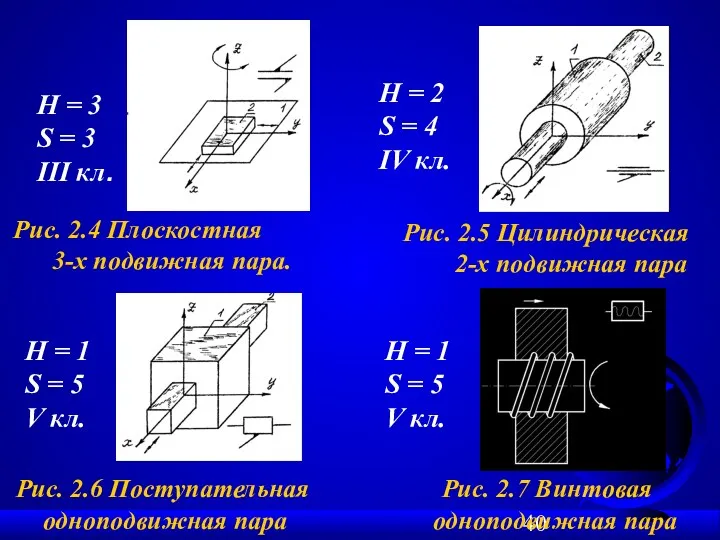
- 40. H = 3 S = 3 III кл. H = 2 S = 4 IV кл.
- 41. Рис. 2.8 Кинематические пары и их условные обозначения
- 42. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 43. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 44. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 45. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 46. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 47. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 48. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 49. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 50. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 51. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 52. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 53. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 54. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 55. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 56. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 57. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 58. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 59. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 60. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 61. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 62. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 63. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 64. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 65. Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в 2000 году.
- 66. Рис. 2.9 Высшая пара в кулачковых механизмах Рис. 2.10 Высшая пара в зубчатых механизмах Поверхности, линии,
- 67. Рис. 2.11 Силовое замыкание высшей пары Рис. 2.12 Геометрическое замыкание высшей пар Кинематические пары могут быть
- 68. 1. 2.3. Степень подвижности механизма Шесть степеней свободы несвязанного твёрдого тела соответствует шести независимым координатам, опреде-ляющим
- 69. В основе любого механизма лежит кинематическая цепь. Это совокупность звеньев, соединённых кинемати-ческими парами. Сложные цепи -
- 70. Сумма всех условий связи, наложенных всеми кинема-тическими парами в общем случае: Степень свободы кинематической цепи зависит
- 71. В механизмах движение рассматривается относительно какого-то звена (стойки), поэтому сразу исключается 6 степеней свободы стойки. n
- 72. Эта формула справедлива, если не наложено никаких других общих дополнительных условий. Условия могут быть самыми разными.
- 73. В плоских механизмах все звенья должны двигаться в одной плоскости или в параллельных плоскостях, т. е.
- 74. Пример 1. Для механизма, изображённого на рис. 2.16.: Рис. 2.16 Пространственный кривошипно-ползунный механизм Рассмотрим примеры: i=1.
- 75. Рис. 2.17 Плоский кривошипно- ползунный механизм Пример 2. Для механизма, изображённого на рис. 2. 17: Входные
- 76. 1. 2.4. Структурный синтез и анализ механизмов. минимальное число звеньев в механизме должно быть 3. Такой
- 77. Входное (начальное) звено со стойкой прини-мается за некоторый условный механизм, который называют исходным механизмом. В плоских
- 78. Если к исходному механизму присоединить некоторые структурные группы с W = 0, то мож-но получить различные
- 79. Таблица 3. 1. Особенности группы Ассура: 1. Число звеньев в группе четное. 2. Стойка не входит
- 80. Табл. 3. 2. Классы групп Ассура Класс группы Ассура определяется числом кинематиче-ских пар, входящих в замкнутый
- 81. Эти группы подразделяются на V видов в зависимости от сочетания и расположения вращательных и поступательных пар
- 82. Первый вид - все три пары вращательные. Второй вид - две пары вращательные, одна (внешняя) поступательная.
- 83. Как построить схему механизма? Пример № 1 структурного синтеза плоских механизмов: W = 1; n =
- 84. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 85. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 86. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 87. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 88. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 89. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 90. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 91. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 92. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 93. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 94. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 95. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 96. + = ϕ 1 ϕ 3 Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 97. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 98. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 99. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 100. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 101. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 102. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 103. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 104. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 105. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 106. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 107. Пример № 2 структурного синтеза плоских механизмов: W = 1; n = 3; p5 = 4.
- 108. + = ϕ1 Sc Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 109. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 110. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 111. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 112. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 113. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 114. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 115. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 116. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 117. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 118. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 119. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 120. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
- 121. Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
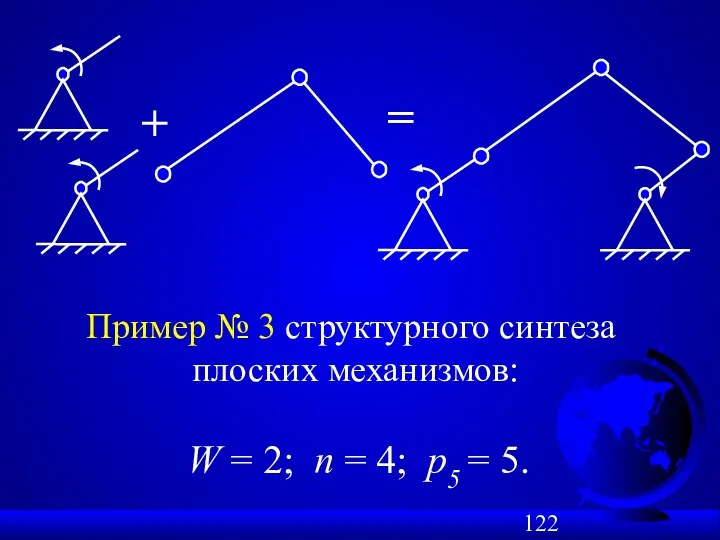
- 122. + = Пример № 3 структурного синтеза плоских механизмов: W = 2; n = 4; p5
- 123. W = 1; n = 5; p5 = 7. + = + Пример № 4 структурного
- 124. Таким образом выполняется структурный синтез механизмов. В системе ДИНАМО используются обобщённые структурные модули, позволяющие структурировать схемы
- 125. Структурный анализ механизма - это процедура, обратная структурному синтезу. Выполняется путем расчленения его на структурные группы
- 126. Рис. 4.1 Пример структурного анализа механизма поршневого насоса Звенья 5 и 4 составляют группу второго вида,
- 127. При выделении групп из механизма условно считается, что кинематические пары, соединяющие звенья с начальным механизмом, отходят
- 128. Рис. 4.2 Схема рычажного механизма третьего класса Механизм, показанный на рис. 4.2, относит-ся к механизмам третьего
- 129. Рис. 4.3 Структурный анализ рычажного механизма третьего класса
- 130. Рис. 4.4 Схема рычажного механизма второго класса Тот же механизм, но с другим входным звеном, является
- 131. Рис. 4.5 Структурный анализ рычажного механизма второго класса
- 132. Для механизма, показанного на рис. 4.2, формула строения имеет вид: Строение механизма можно записать услов-ной формулой.
- 133. Порядок структурного анализа 1. Пронумеровать звенья арабскими цифрами, входное звено обозначив цифрой 1, стойку - цифрой
- 134. 7. Выделить начальные механизмы. 8. Оставшуюся кинематическую цепь разложить на структурные группы. 9. Определить класс, порядок
- 135. Детали машин ─ основы расчета и конструирования деталей машин По условиям производства и монтажа части механизмов
- 136. Деталь ─ изделие, изготовленное из однородного по наименованию и марке материала, без применения сборочных операций; Сборочная
- 137. Различают детали машин общего и специального назначения к деталям машин общего назначения относятся: 1. детали и
- 138. 3. Детали и узлы для осуществления вращательного и поступательного движения частей машин: оси и валы, подшипник
- 139. Являясь частями самых различных машин, детали машин общего назначения выполняют в них одинаковые функции. Поэтому, весьма
- 140. Предмет ТММ тесно связан с основными теоретическими дисцип-линами: математикой, физикой, теоретической механикой. Вместе с курсами сопротивления
- 142. Скачать презентацию
Курс лекций по дисциплине Механика.Теории механизмов и машин, детали машин и
Курс лекций по дисциплине Механика.Теории механизмов и машин, детали машин и
При подготовке материала использован многолетний опыт работы автора и его коллег
При подготовке материала использован многолетний опыт работы автора и его коллег

Теория механизмов и машин: Учебник для втузов .К. В. Фролов, С.
Теория механизмов и машин: Учебник для втузов .К. В. Фролов, С.
1. Иосилевич Г.Б. Детали машин. -М.: Машино- строение, 1988. - 368
1. Иосилевич Г.Б. Детали машин. -М.: Машино- строение, 1988. - 368
В процессе изучения курса знакомьтесь с пакетами.
Для этого необходимо выйти на
Модуль 1
Введение. Структура механизмов
1. Входной тестовый контроль к модулю1.
2. Лекции
Модуль 1
Введение. Структура механизмов
1. Входной тестовый контроль к модулю1.
2. Лекции
3. Лабораторные работы:
3.2. Структурный анализ механизмов (на моделях).
3.3.
3. Лабораторные работы:
3.2. Структурный анализ механизмов (на моделях).
3.3.
Перечень вопросов входного контроля для модуля № 1:
1. Какая величина называется
Перечень вопросов входного контроля для модуля № 1:
1. Какая величина называется
9. Какое действие тел друг на друга называется механическим?
10. Что является мерой
9. Какое действие тел друг на друга называется механическим?
10. Что является мерой
16. Какая величина называется скоростью движения?
17. Какая величина называется ускорением движения?
16. Какая величина называется скоростью движения?
17. Какая величина называется ускорением движения?
26. Что такое производная?
27. Какие свойства справедливы для производной?
28. Какая величина
26. Что такое производная?
27. Какие свойства справедливы для производной?
28. Какая величина
35. Какие стандартные масштабы являются масштабами увеличения?
36. Какие стандартные масштабы
35. Какие стандартные масштабы являются масштабами увеличения?
36. Какие стандартные масштабы
43. Что характеризует быстроту изменения углового перемещения тела с течением
43. Что характеризует быстроту изменения углового перемещения тела с течением
48. Как называется движение, при котором точка в равные произвольно
48. Как называется движение, при котором точка в равные произвольно
53. Как называется теорема, которой соответст- вует утверждение “Квадрат любой стороны произвольного
53. Как называется теорема, которой соответст- вует утверждение “Квадрат любой стороны произвольного
57. Что называется котангенсом острого угла прямоугольного треугольника?
58. Чему равна
57. Что называется котангенсом острого угла прямоугольного треугольника?
58. Чему равна
ЛЕКЦИЯ № 1
1.1. Введение. Предметы и задачи дисциплины.
1.2. Элементы структуры
ЛЕКЦИЯ № 1
1.1. Введение. Предметы и задачи дисциплины.
1.2. Элементы структуры
57. Что называется котангенсом острого угла прямоугольного треугольника?
58. Чему равна
57. Что называется котангенсом острого угла прямоугольного треугольника?
58. Чему равна
Современное
производство невозможно без самых разнообразных машин и механизмов.
Современное
производство невозможно без самых разнообразных машин и механизмов.
1.2.1. Понятия: механизм, машина
Машина есть техническое устройство, предназначенное для механизации какого
1.2.1. Понятия: механизм, машина
Машина есть техническое устройство, предназначенное для механизации какого
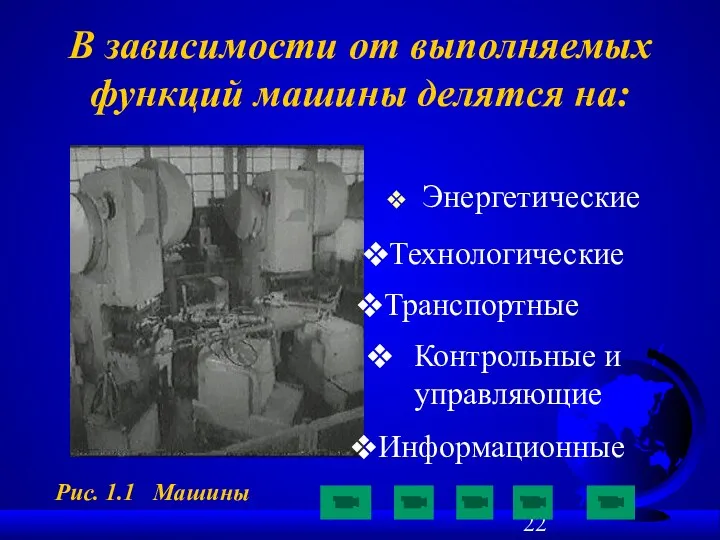
В зависимости от выполняемых функций машины делятся на:
Энергетические
Технологические
Транспортные
Контрольные и управляющие
Информационные
Рис. 1.1
В зависимости от выполняемых функций машины делятся на:
Энергетические
Технологические
Транспортные
Контрольные и управляющие
Информационные
Рис. 1.1

Типы машин
Рис. 1.2 Гидравлические машины
Рис. 1.3 Пневматические машины
Типы машин
Рис. 1.2 Гидравлические машины
Рис. 1.3 Пневматические машины
Механизмы делятся на группы:
1. Преобразующие какую-либо энер-гию в механическую работу.
Механизмы делятся на группы: 1. Преобразующие какую-либо энер-гию в механическую работу.
2. Потребляющие подводимую к ним энергию, выполняющие определенные технологические функции.
2. Потребляющие подводимую к ним энергию, выполняющие определенные технологические функции.
Исполнительный механизм может работать только в том случае, если он соединён
Исполнительный механизм может работать только в том случае, если он соединён
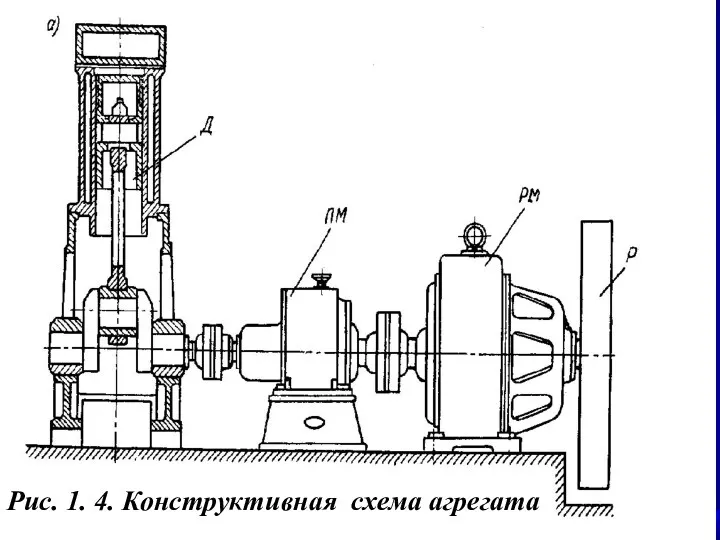
Рис. 1. 4. Конструктивная схема агрегата
Рис. 1. 4. Конструктивная схема агрегата

Рис. 1.5 Функциональная схема агрегата
ДВ - двигатель
ДВ
РМ
ПМ
САУ
РМ – рабочая машина
ПМ –
Рис. 1.5 Функциональная схема агрегата
ДВ - двигатель
ДВ
РМ
ПМ
САУ
РМ – рабочая машина
ПМ –

.
Схема кривошипно-
ползунного механизма
а) конструктивная;
б) кинематическая
(структурная).
в) структурная
.
Схема кривошипно-
ползунного механизма
а) конструктивная;
б) кинематическая
(структурная).
в) структурная
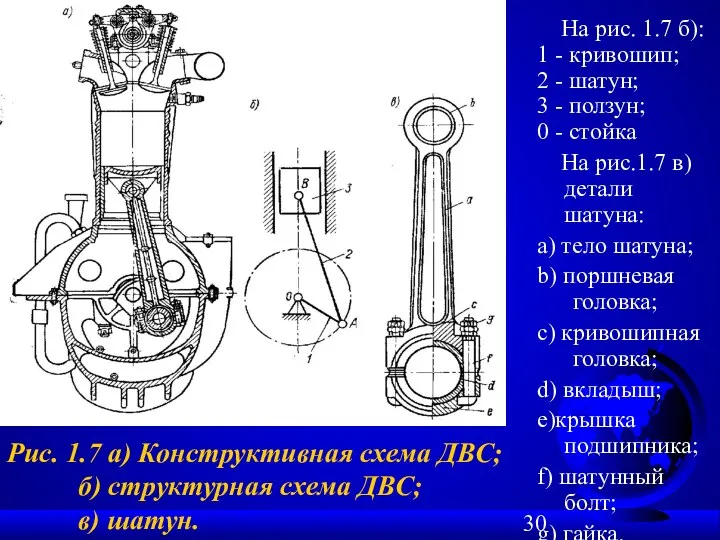
На рис. 1.7 б):
1 - кривошип;
2 - шатун;
3 - ползун;
0
На рис. 1.7 б):
1 - кривошип;
2 - шатун;
3 - ползун;
0
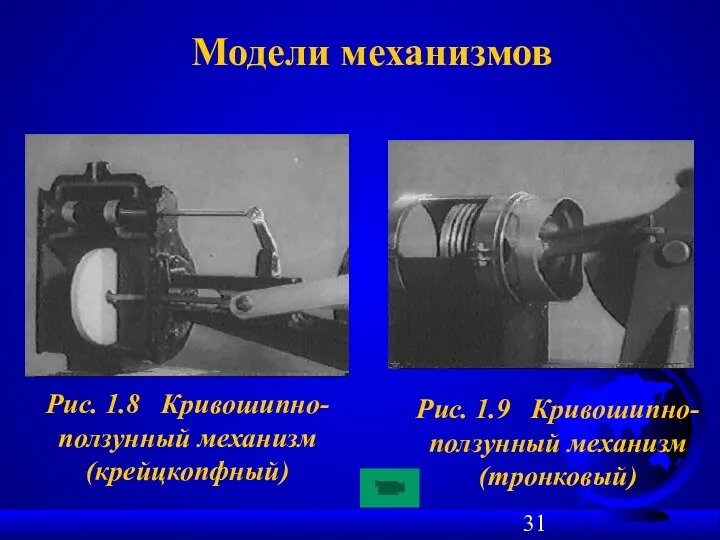
Рис. 1.8 Кривошипно-ползунный механизм (крейцкопфный)
Рис. 1.9 Кривошипно-ползунный механизм (тронковый)
Модели механизмов
Рис. 1.8 Кривошипно-ползунный механизм (крейцкопфный)
Рис. 1.9 Кривошипно-ползунный механизм (тронковый)
Модели механизмов
1.2.2. Звенья и их соединения. Кинематические пары.
Механизм состоит из нескольких отдельных
1.2.2. Звенья и их соединения. Кинематические пары.
Механизм состоит из нескольких отдельных
Звено, которое определяет движение других звеньев называется входным звеном (ведущим). Движение
Звено, которое определяет движение других звеньев называется входным звеном (ведущим). Движение
Особое место занимают механизмы, в кото-рых имеются промежуточные (вспомогательные) звенья. Они
Особое место занимают механизмы, в кото-рых имеются промежуточные (вспомогательные) звенья. Они
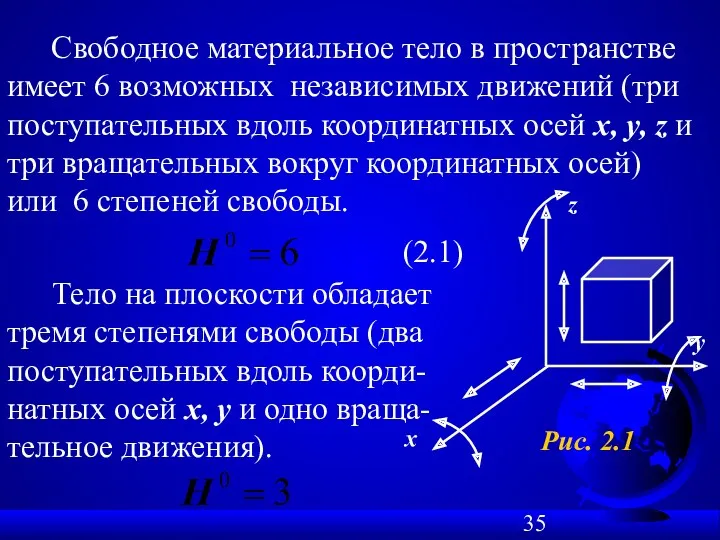
Свободное материальное тело в пространстве имеет 6 возможных независимых движений (три
Свободное материальное тело в пространстве имеет 6 возможных независимых движений (три
В механизме все звенья связаны друг с другом. Связь может быть
В механизме все звенья связаны друг с другом. Связь может быть
Звенья в механизме связаны друг с другом, следовательно они теряют подвижность.
Звенья в механизме связаны друг с другом, следовательно они теряют подвижность.
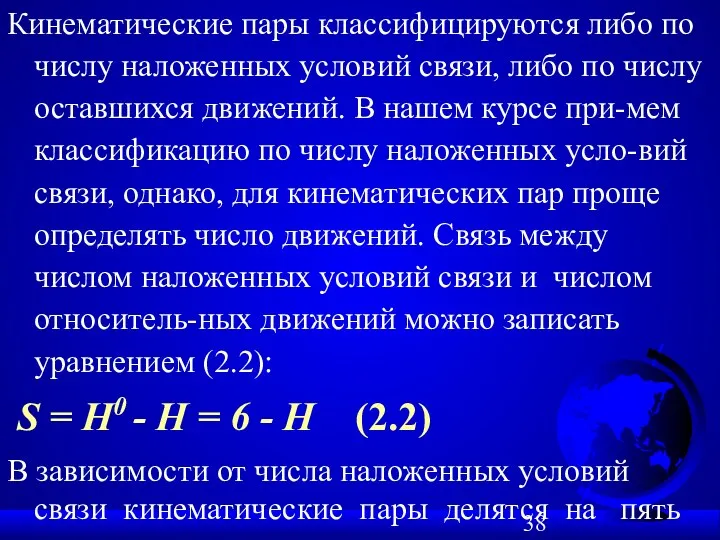
Кинематические пары классифицируются либо по числу наложенных условий связи, либо по
Кинематические пары классифицируются либо по числу наложенных условий связи, либо по
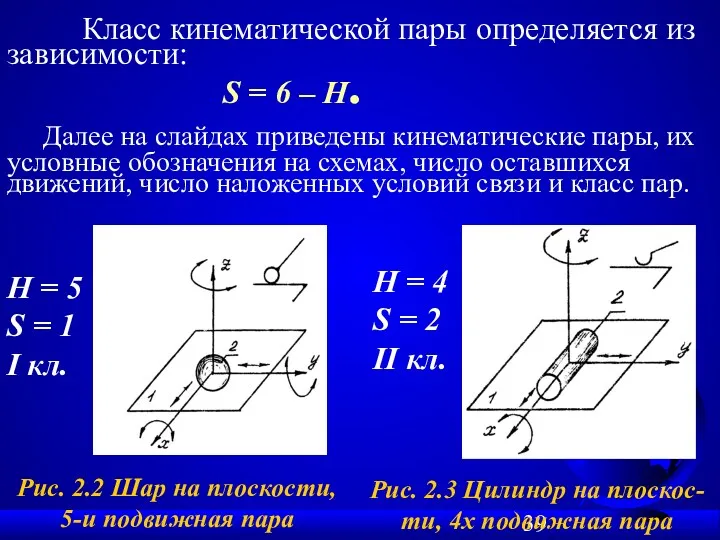
Класс кинематической пары определяется из зависимости:
S = 6 – H.
Далее
Класс кинематической пары определяется из зависимости: S = 6 – H. Далее
H = 3
S = 3
III кл.
H = 2
S = 4
IV кл.
H = 3
S = 3
III кл.
H = 2
S = 4
IV кл.
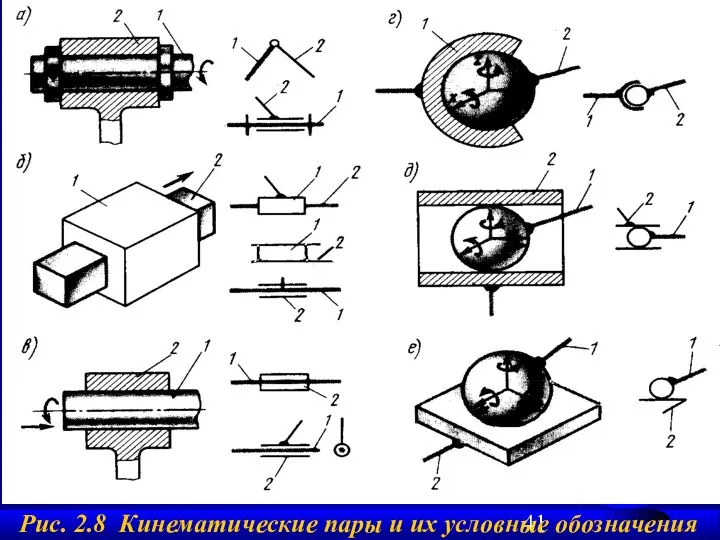
Рис. 2.8 Кинематические пары и их условные обозначения
Рис. 2.8 Кинематические пары и их условные обозначения

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в
Эта мультипликация сделана студентом специаль-ности ЭПОПТ и ТТ Куликом Евгением в

Рис. 2.9 Высшая пара
в кулачковых механизмах
Рис. 2.10 Высшая пара
в зубчатых механизмах
Поверхности,
Рис. 2.9 Высшая пара
в кулачковых механизмах
Рис. 2.10 Высшая пара
в зубчатых механизмах
Поверхности,
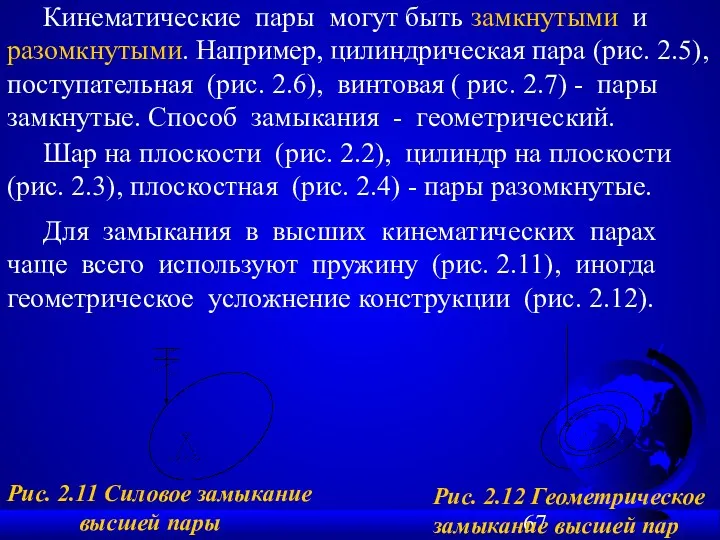
Рис. 2.11 Силовое замыкание
высшей пары
Рис. 2.12 Геометрическое
замыкание высшей пар
Кинематические пары
Рис. 2.11 Силовое замыкание
высшей пары
Рис. 2.12 Геометрическое
замыкание высшей пар
Кинематические пары
1. 2.3. Степень подвижности механизма
Шесть степеней свободы несвязанного твёрдого тела
1. 2.3. Степень подвижности механизма
Шесть степеней свободы несвязанного твёрдого тела
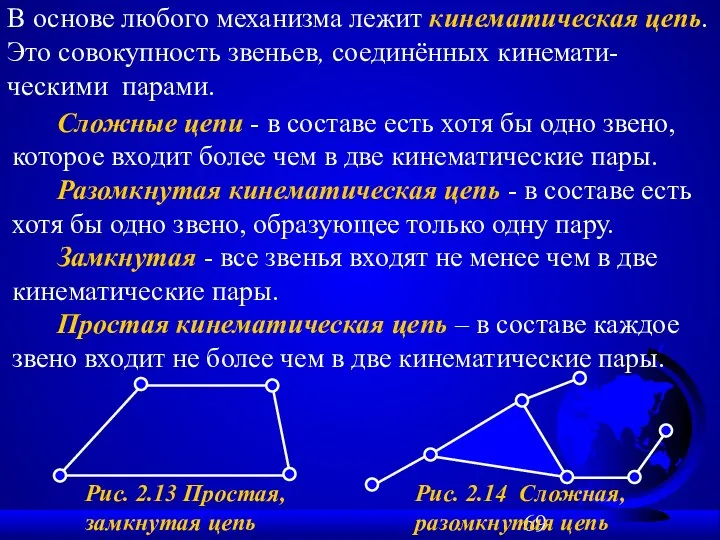
В основе любого механизма лежит кинематическая цепь. Это совокупность звеньев, соединённых
В основе любого механизма лежит кинематическая цепь. Это совокупность звеньев, соединённых
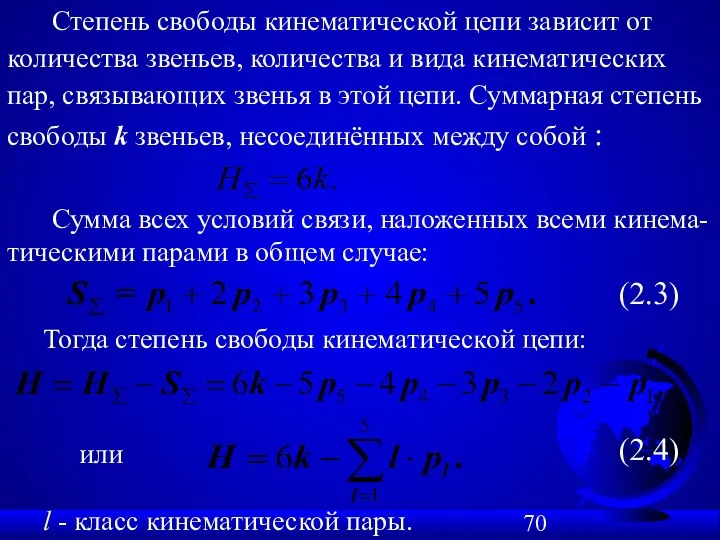
Сумма всех условий связи, наложенных всеми кинема-тическими парами в общем случае:
Степень
Сумма всех условий связи, наложенных всеми кинема-тическими парами в общем случае:
Степень
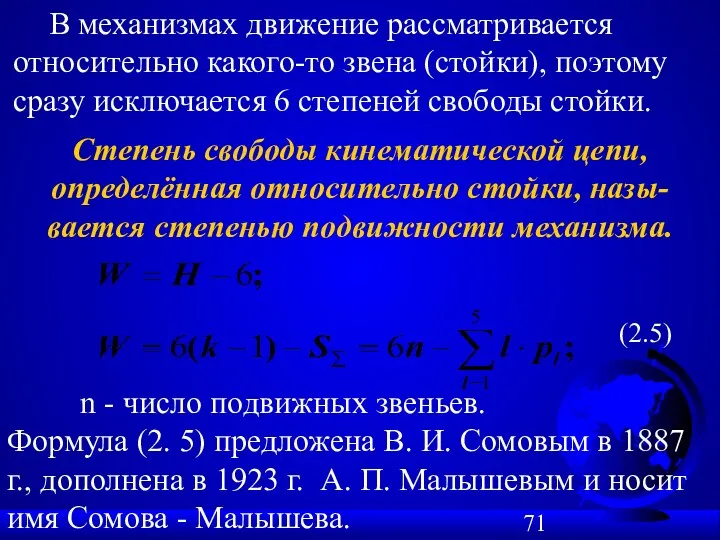
В механизмах движение рассматривается относительно какого-то звена (стойки), поэтому сразу исключается
В механизмах движение рассматривается относительно какого-то звена (стойки), поэтому сразу исключается
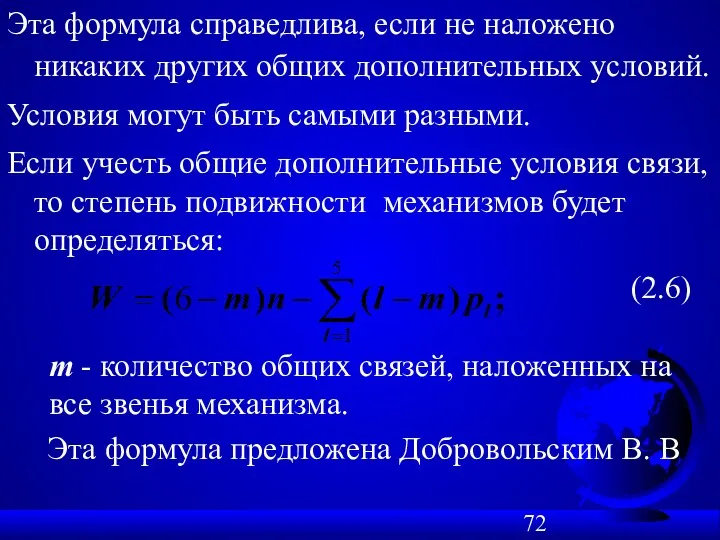
Эта формула справедлива, если не наложено никаких других общих дополнительных условий.
Условия
Эта формула справедлива, если не наложено никаких других общих дополнительных условий.
Условия
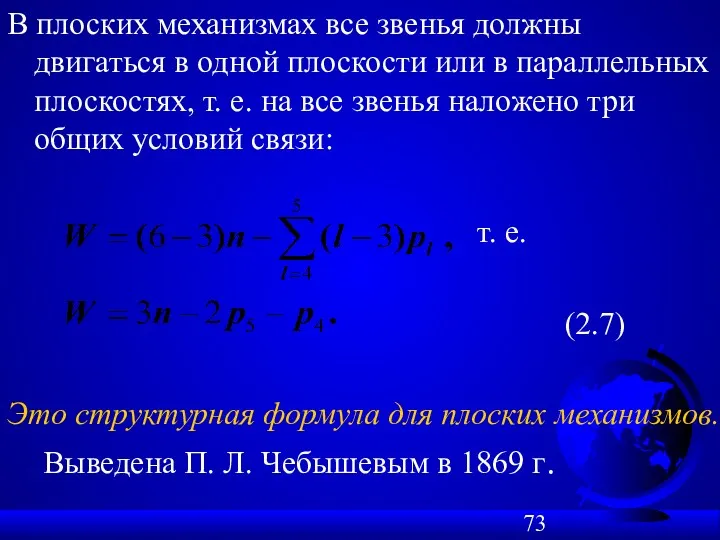
В плоских механизмах все звенья должны двигаться в одной плоскости или
В плоских механизмах все звенья должны двигаться в одной плоскости или
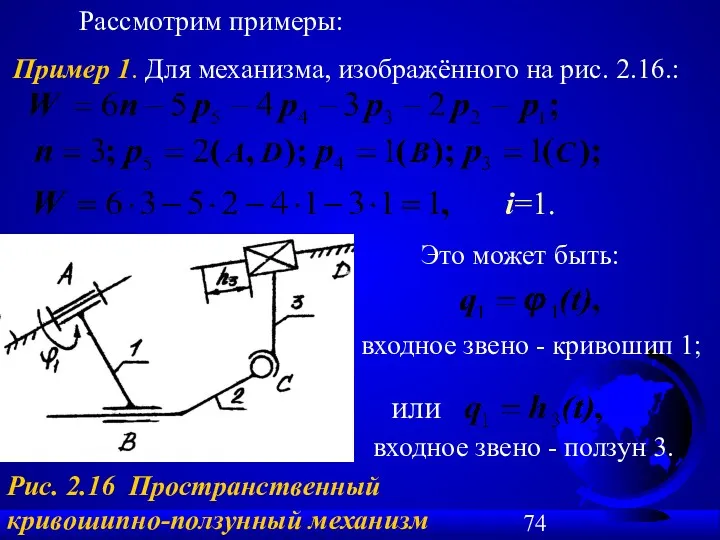
Пример 1. Для механизма, изображённого на рис. 2.16.:
Рис. 2.16 Пространственный кривошипно-ползунный
Пример 1. Для механизма, изображённого на рис. 2.16.:
Рис. 2.16 Пространственный кривошипно-ползунный
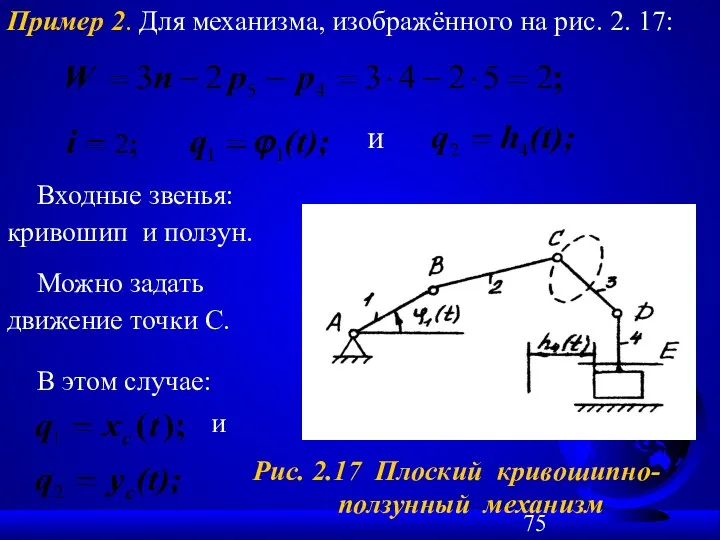
Рис. 2.17 Плоский кривошипно- ползунный механизм
Пример 2. Для механизма, изображённого на
Рис. 2.17 Плоский кривошипно- ползунный механизм
Пример 2. Для механизма, изображённого на
1. 2.4. Структурный синтез и анализ механизмов.
минимальное число звеньев в механизме
1. 2.4. Структурный синтез и анализ механизмов.
минимальное число звеньев в механизме
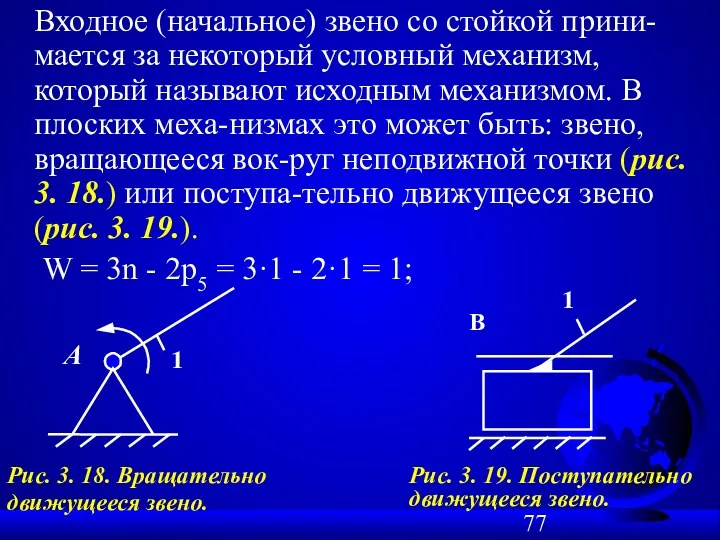
Входное (начальное) звено со стойкой прини-мается за некоторый условный механизм, который
Входное (начальное) звено со стойкой прини-мается за некоторый условный механизм, который
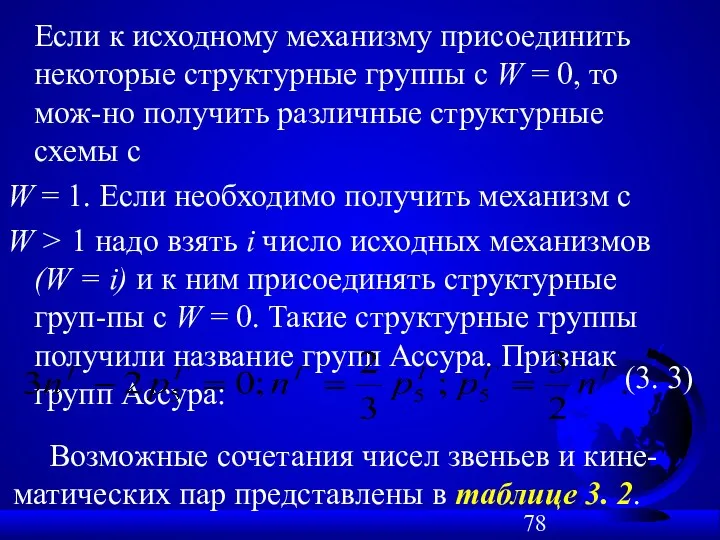
Если к исходному механизму присоединить некоторые структурные группы с W =
Если к исходному механизму присоединить некоторые структурные группы с W =
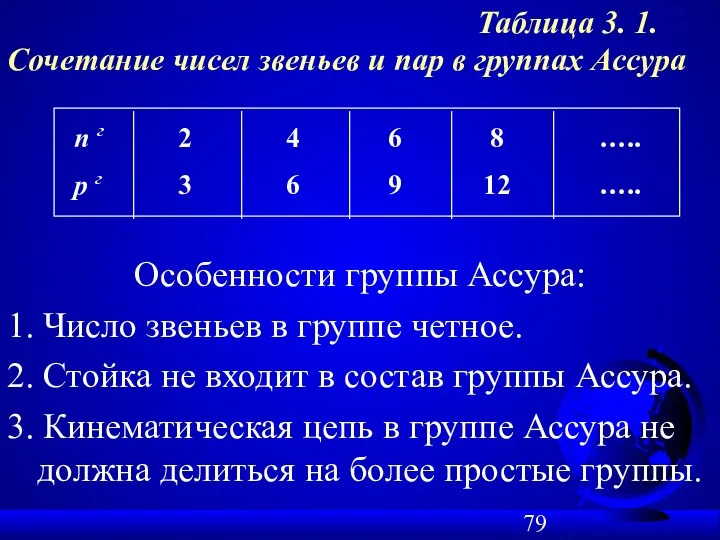
Таблица 3. 1.
Особенности группы Ассура:
1. Число звеньев в группе четное.
2.
Таблица 3. 1.
Особенности группы Ассура:
1. Число звеньев в группе четное.
2.
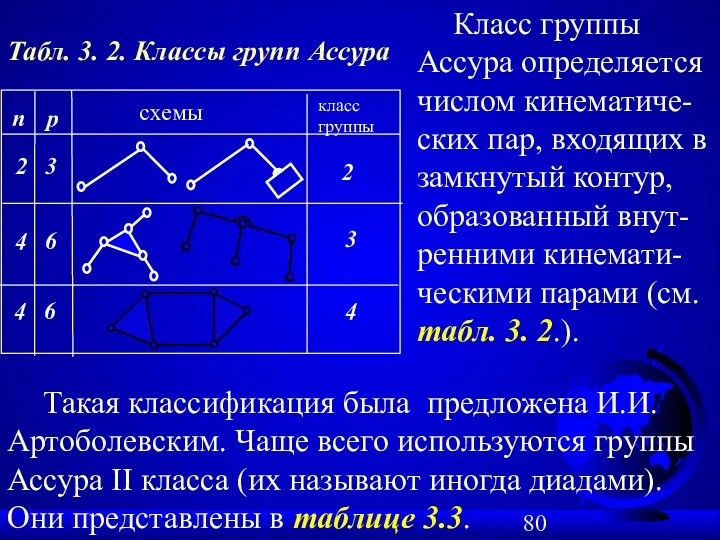
Табл. 3. 2. Классы групп Ассура
Класс группы Ассура определяется числом кинематиче-ских
Табл. 3. 2. Классы групп Ассура
Класс группы Ассура определяется числом кинематиче-ских
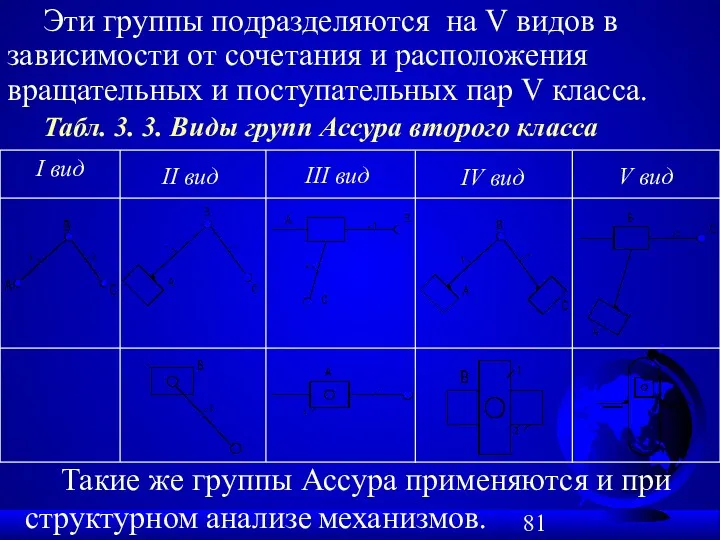
Эти группы подразделяются на V видов в зависимости от сочетания и
Эти группы подразделяются на V видов в зависимости от сочетания и
Первый вид - все три пары вращательные.
Второй вид - две
Первый вид - все три пары вращательные.
Второй вид - две

Как построить схему механизма? Пример № 1 структурного синтеза плоских
Как построить схему механизма? Пример № 1 структурного синтеза плоских
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

+
=
ϕ 1
ϕ 3
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
+
=
ϕ 1
ϕ 3
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
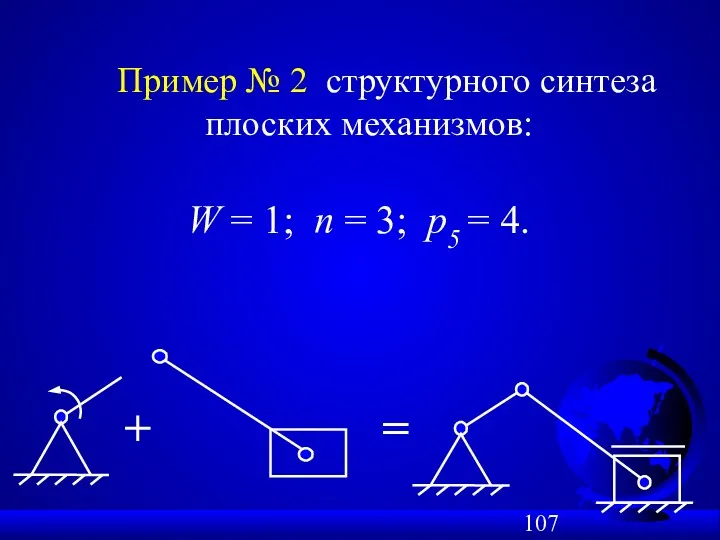
Пример № 2 структурного синтеза плоских механизмов:
W = 1; n =
Пример № 2 структурного синтеза плоских механизмов:
W = 1; n =

+
=
ϕ1
Sc
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
+
=
ϕ1
Sc
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.

Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
Мультипликация выполнена программистом
Воронуха И. Г. в 2000 году.
+
=
Пример № 3 структурного синтеза
плоских механизмов:
W = 2; n =
+
=
Пример № 3 структурного синтеза
плоских механизмов:
W = 2; n =
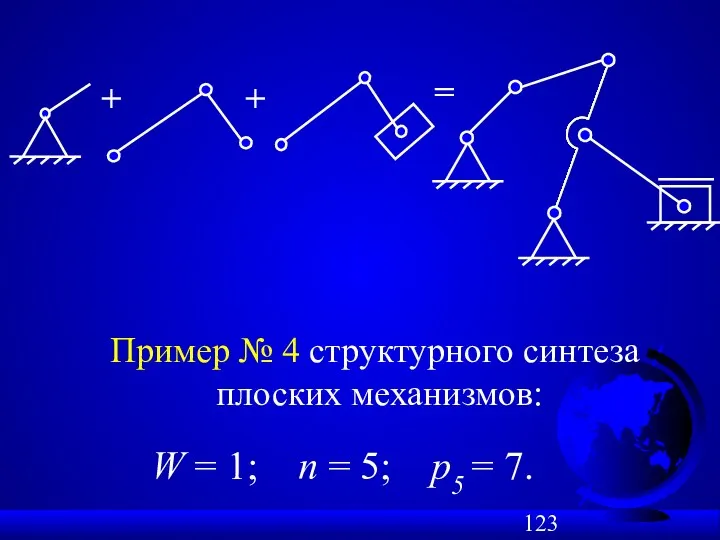
W = 1; n = 5; p5 = 7.
+
=
+
Пример № 4
W = 1; n = 5; p5 = 7.
+
=
+
Пример № 4
Таким образом выполняется структурный синтез механизмов. В системе ДИНАМО используются обобщённые
Таким образом выполняется структурный синтез механизмов. В системе ДИНАМО используются обобщённые
Структурный анализ механизма - это процедура, обратная структурному синтезу. Выполняется путем
Структурный анализ механизма - это процедура, обратная структурному синтезу. Выполняется путем

Рис. 4.1 Пример структурного анализа механизма поршневого насоса
Звенья 5 и
Рис. 4.1 Пример структурного анализа механизма поршневого насоса
Звенья 5 и
При выделении групп из механизма условно считается, что кинематические пары, соединяющие
При выделении групп из механизма условно считается, что кинематические пары, соединяющие
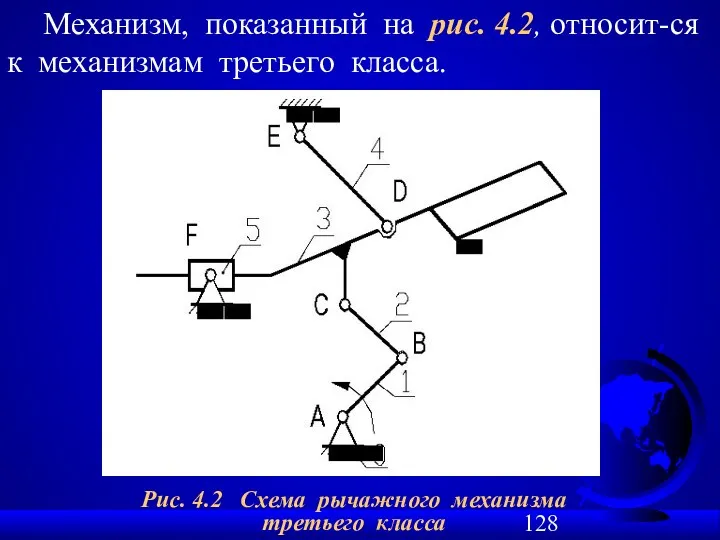
Рис. 4.2 Схема рычажного механизма третьего класса
Механизм, показанный на рис.
Рис. 4.2 Схема рычажного механизма третьего класса
Механизм, показанный на рис.

Рис. 4.3 Структурный анализ рычажного механизма третьего класса
Рис. 4.3 Структурный анализ рычажного механизма третьего класса
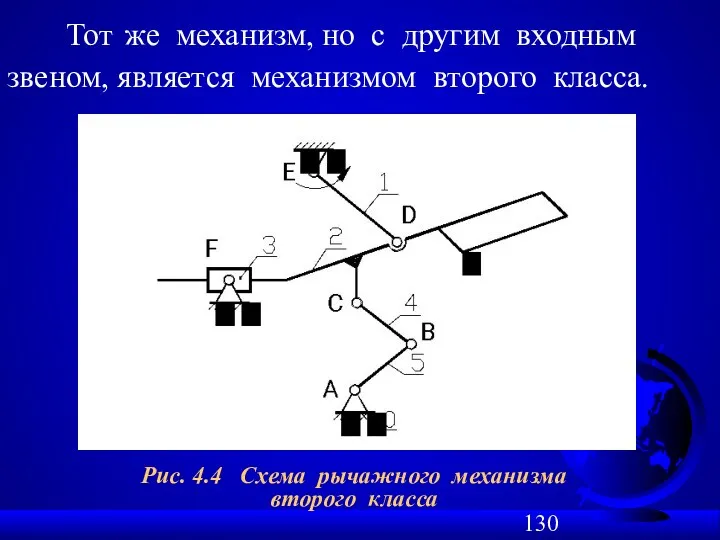
Рис. 4.4 Схема рычажного механизма второго класса
Тот же механизм, но
Рис. 4.4 Схема рычажного механизма второго класса
Тот же механизм, но
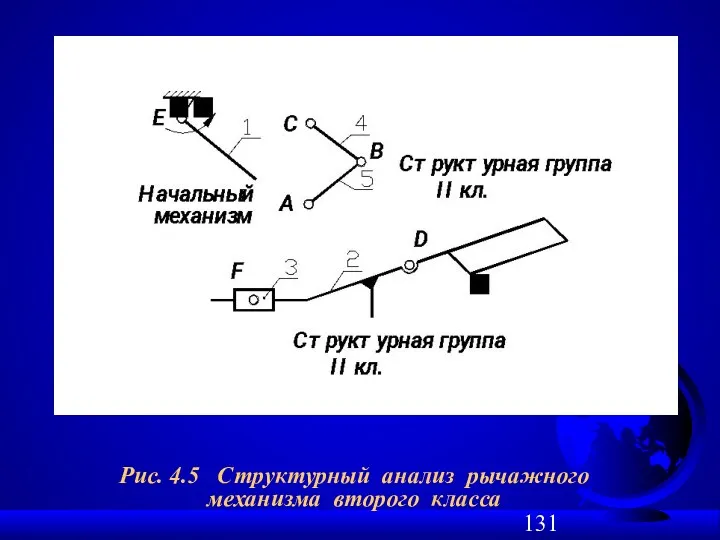
Рис. 4.5 Структурный анализ рычажного механизма второго класса
Рис. 4.5 Структурный анализ рычажного механизма второго класса
Для механизма, показанного на рис. 4.2, формула строения имеет вид:
Строение механизма
Для механизма, показанного на рис. 4.2, формула строения имеет вид:
Строение механизма
Порядок структурного анализа
1. Пронумеровать звенья арабскими цифрами, входное звено обозначив цифрой
Порядок структурного анализа
1. Пронумеровать звенья арабскими цифрами, входное звено обозначив цифрой
7. Выделить начальные механизмы.
8. Оставшуюся кинематическую цепь разложить на структурные группы.
7. Выделить начальные механизмы.
8. Оставшуюся кинематическую цепь разложить на структурные группы.
Детали машин ─ основы расчета и конструирования деталей машин
По условиям
Детали машин ─ основы расчета и конструирования деталей машин
По условиям
Деталь ─ изделие, изготовленное из однородного по наименованию и марке
Деталь ─ изделие, изготовленное из однородного по наименованию и марке
Различают детали машин общего и специального назначения к деталям машин общего
Различают детали машин общего и специального назначения к деталям машин общего
3. Детали и узлы для осуществления вращательного и поступательного движения
3. Детали и узлы для осуществления вращательного и поступательного движения
Являясь частями самых различных машин, детали машин общего назначения выполняют
Являясь частями самых различных машин, детали машин общего назначения выполняют
Предмет ТММ тесно связан с основными теоретическими дисцип-линами: математикой, физикой,
Предмет ТММ тесно связан с основными теоретическими дисцип-линами: математикой, физикой,
 Поэтапное рисование кошки
Поэтапное рисование кошки Начало и конец презентации
Начало и конец презентации Технология педагогической деятельности
Технология педагогической деятельности Презентация Правила пожарной безопасности в лесу
Презентация Правила пожарной безопасности в лесу Проект технологической линии производства сметаны
Проект технологической линии производства сметаны Что такое дисграфия?
Что такое дисграфия? Конспект проведения НОД для детей старшего дошкольного возраста на тему: Путешествие в мир посуды в рамках тематической недели Посуда.
Конспект проведения НОД для детей старшего дошкольного возраста на тему: Путешествие в мир посуды в рамках тематической недели Посуда. Предоставление гарантии от ООО “BPW-Ост”
Предоставление гарантии от ООО “BPW-Ост” Нәрлендіру көздерінің көмекші құрылғылары
Нәрлендіру көздерінің көмекші құрылғылары Презентация клуба адаптации для родителей Дружба
Презентация клуба адаптации для родителей Дружба Алхимия
Алхимия Рыба мороженая
Рыба мороженая Предметно-развивающая среда кабинета начальных классов
Предметно-развивающая среда кабинета начальных классов Методы воздействия на организм больного (физиотерапия)
Методы воздействия на организм больного (физиотерапия) Источники тепла систем теплоснабжения
Источники тепла систем теплоснабжения Мастер-класс Метапредметный подход к определению математических понятий
Мастер-класс Метапредметный подход к определению математических понятий Конспект индивидуального занятия в старшей группе Автоматизация звука С в словах
Конспект индивидуального занятия в старшей группе Автоматизация звука С в словах Политика контрреформ
Политика контрреформ Компьютер для ребенка - хорошо или плохо
Компьютер для ребенка - хорошо или плохо Трансмиссии (силовые передачи). Бортовая коробка передач (коробка передач, раздаточная коробка, мосты).Тема 10
Трансмиссии (силовые передачи). Бортовая коробка передач (коробка передач, раздаточная коробка, мосты).Тема 10 Разработка технической документации на построение локальной сети предприятия
Разработка технической документации на построение локальной сети предприятия Михаил Александрович Зенкевич
Михаил Александрович Зенкевич Как развивать внимание? (часть 3)
Как развивать внимание? (часть 3) Программа по формированию здорового образа жизни и культуры здоровья кадет
Программа по формированию здорового образа жизни и культуры здоровья кадет Палаты бояр Романовых (Варварка, 10)
Палаты бояр Романовых (Варварка, 10) презентация Новый годвторая младшая группа
презентация Новый годвторая младшая группа Олимпиада по ОПК 2012. Разбор заданий 5-9 классы
Олимпиада по ОПК 2012. Разбор заданий 5-9 классы A trip to England
A trip to England