Лекция №3. Зондирующий сигнал и его характеристики. Часть 1. Теоретические основы радиолокации презентация
- Лекция №3. Зондирующий сигнал и его характеристики. Часть 1. Теоретические основы радиолокации

Содержание
- 2. дать характеристику зондирующим сигналам РЛС, раскрыв содержание их классификации, формального описания и параметров, по которым сигналы
- 3. 2. Основные характеристики зондирующих сигналов. Вопросы лекции: 1. Виды и математические модели зондирующих сигналов. 3. Сложные
- 4. Литература: Основная с.37-43, 59-60;
- 5. Вопрос 1 Виды и математические модели зондирующих сигналов
- 6. Под зондирующим радиолокационным сигналом (ЗС) понимают радиоволну, излученную передающей антенной РЛС в пространство. В активной радиолокации
- 7. Физически существующий сигнал (1) является реальной частью комплексного сигнала (2), т.е. Геометрической интерпретацией ЗС в форме
- 8. Проекции этого вектора на оси координат являются действительной и мнимой частями сигнала в форме (2), т.е.
- 9. Математически они записываются таким образом: x(t) = X(t) cоs(ω0t + ϕ0), где
- 10. Графически законы модуляции и сами радиоимпульсы выглядят следующим образом X(t) t 0 xm0 x(t) t 0
- 11. Последовательность прямоугольных радиоимпульсов, имеющих период повторения T, имеет вид Если начальная фаза радиоимпульсов φк в последовательности
- 12. Выводы по первому вопросу 1.Таким образом, для решения задач РЛ применяются различные виды ЗС: импульсные, непрерывные,
- 13. Вопрос 2 Основные характеристики зондирующих сигналов
- 14. Характеристики служат для описания и сравнения сигналов. Различают энергетические, временные, частотные и время-частотные характеристики. Рассмотрим подробнее
- 15. Последовательности радиоимпульсов и непрерывные сигналы характеризуют средней мощностью: где Q = T/ τи. - скважность; -
- 16. Аналогичная связь существует между законом модуляции и его спектром Спектр сигнала представляют в виде АЧС и
- 17. АЧС типовых простых сигналов выглядят следующим образом Область частот, в пределах которой сосредоточена основная часть всей
- 18. Автокорреляционная функция (АКФ). АКФ характеризует взаимосвязь между двумя значениями зондирующего сигнала, разнесенными по времени на интервал
- 19. Энергетический спектр. Энергетический спектр зондирующего сигнала можно определить как распределение вдоль оси частот его энергии. Энергетический
- 20. Известные схемы оптимальной (согласованной) обработки радиолокационных сигналов базируются на операции вычисления корреляционного интеграла (модульного значения): -
- 21. Выводы по второму вопросу 1. Таким образом, к основным характеристикам зондирующих сигналов относятся: закон модуляции, длительность,
- 22. Вопрос 3 Сложные энергоёмкие сигналы
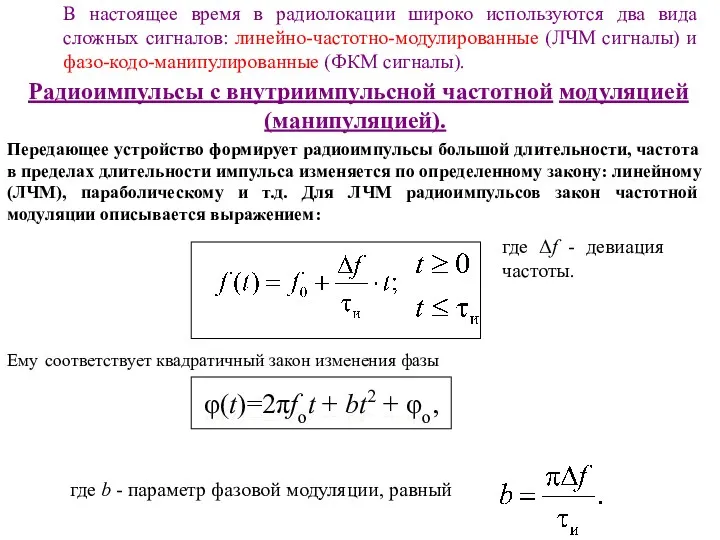
- 23. В настоящее время в радиолокации широко используются два вида сложных сигналов: линейно-частотно-модулированные (ЛЧМ сигналы) и фазо-кодо-манипулированные
- 24. Комплексная амплитуда ЛЧМ радиоимпульса описывается выражением Функциональная схема сжимающего фильтра Зависимость tз от частоты для дисперсионной
- 25. Принцип сжатия импульсов: а- форма ЛЧМ радиоимпульсов на входе; б- закон изменения частоты радиоимпульса от времени;
- 26. ФКМ радиоимпульсы. ФКМ радиоимпульс состоит из ряда примыкающих друг к другу прямоугольных парциальных радиоимпульсов, имеющих одинаковую
- 27. Фильтр с такой импульсной характеристикой может быть построен на линии задержки с отводами и общим сумматором.
- 28. Процесс оптимальной фильтрации ФМ-сигнала: а - согласованный фильтр ФМ-сигнала (кода Баркера для n = 7); б)
- 29. АЧС ФКМ сигнала выглядит следующим образом Δfс=1/τо Ширина спектра ФКМ-радиоимпульса обратно пропорциональна длительности парциального импульса, а
- 30. Выводы по третьему вопросу Таким образом, основными широкополосными сигналами, применяемыми в РЛС, являются ЛЧМ и ФКМ
- 31. Для решения задач РЛ применяются различные виды ЗС: импульсные, непрерывные, с внутриимпульсной модуляцией и без таковой,
- 32. Отработать материал лекции в соответствии с рекомендованной литературой: Л 1/о, с.37-43, 59-60; Л 2/д, с.20-54. Задание
- 34. Скачать презентацию
дать характеристику зондирующим сигналам РЛС, раскрыв содержание их классификации, формального
дать характеристику зондирующим сигналам РЛС, раскрыв содержание их классификации, формального
2. Основные характеристики зондирующих сигналов.
Вопросы лекции:
1. Виды и математические модели
2. Основные характеристики зондирующих сигналов.
Вопросы лекции:
1. Виды и математические модели
Литература:
Основная
с.37-43, 59-60;
Литература:
Основная
с.37-43, 59-60;
Вопрос 1
Виды и математические
модели зондирующих сигналов
Вопрос 1
Виды и математические
модели зондирующих сигналов
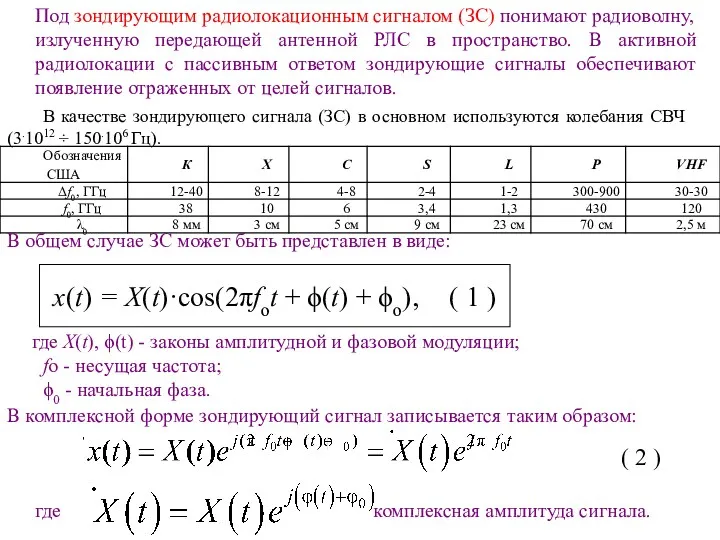
Под зондирующим радиолокационным сигналом (ЗС) понимают радиоволну, излученную передающей антенной РЛС
Под зондирующим радиолокационным сигналом (ЗС) понимают радиоволну, излученную передающей антенной РЛС
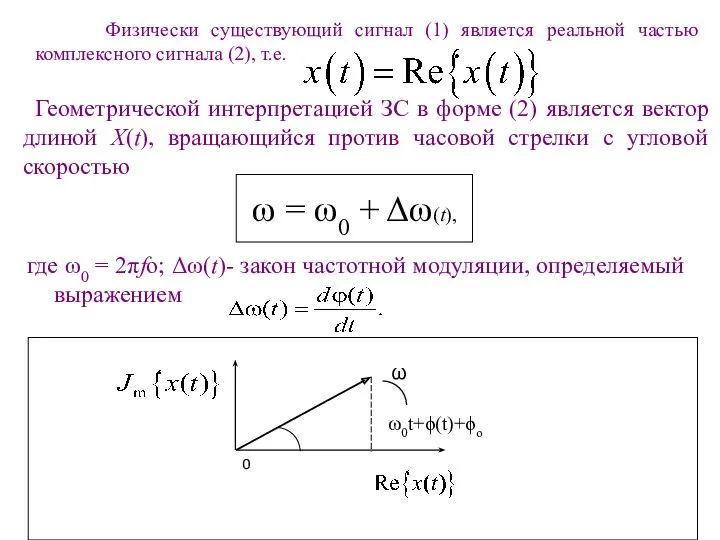
Физически существующий сигнал (1) является реальной частью комплексного сигнала (2),
Физически существующий сигнал (1) является реальной частью комплексного сигнала (2),
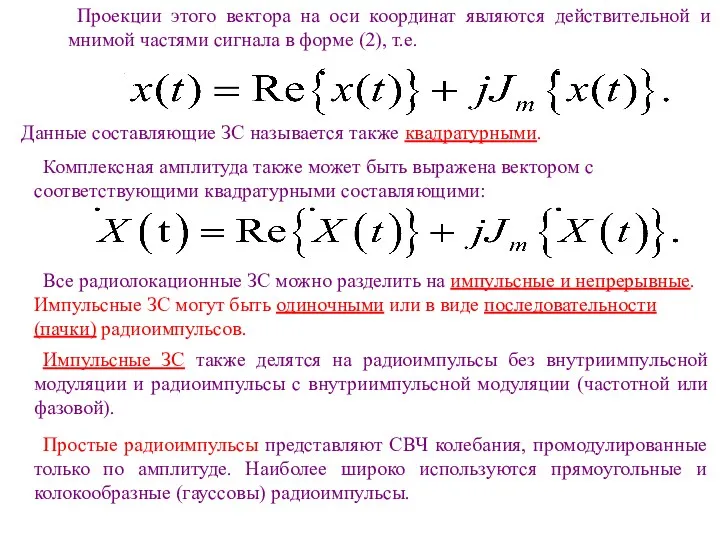
Проекции этого вектора на оси координат являются действительной и мнимой частями
Проекции этого вектора на оси координат являются действительной и мнимой частями
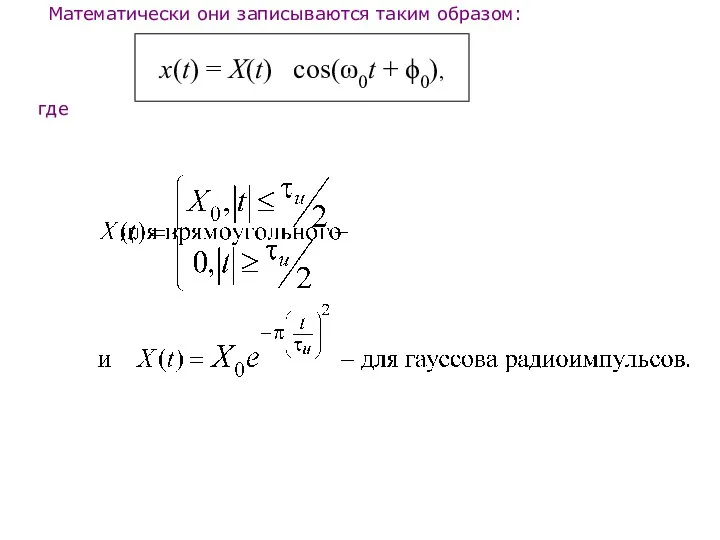
Математически они записываются таким образом:
x(t) = X(t) cоs(ω0t + ϕ0),
Математически они записываются таким образом:
x(t) = X(t) cоs(ω0t + ϕ0),
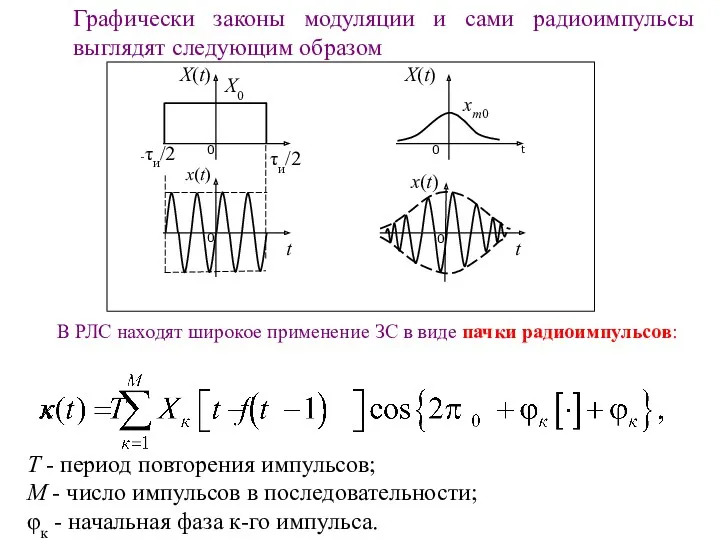
Графически законы модуляции и сами радиоимпульсы выглядят следующим образом
X(t)
t
0
xm0
x(t)
t
0
0
X0
X(t)
τи/2
-τи/2
x(t)
t
0
В РЛС
Графически законы модуляции и сами радиоимпульсы выглядят следующим образом
X(t)
t
0
xm0
x(t)
t
0
0
X0
X(t)
τи/2
-τи/2
x(t)
t
0
В РЛС
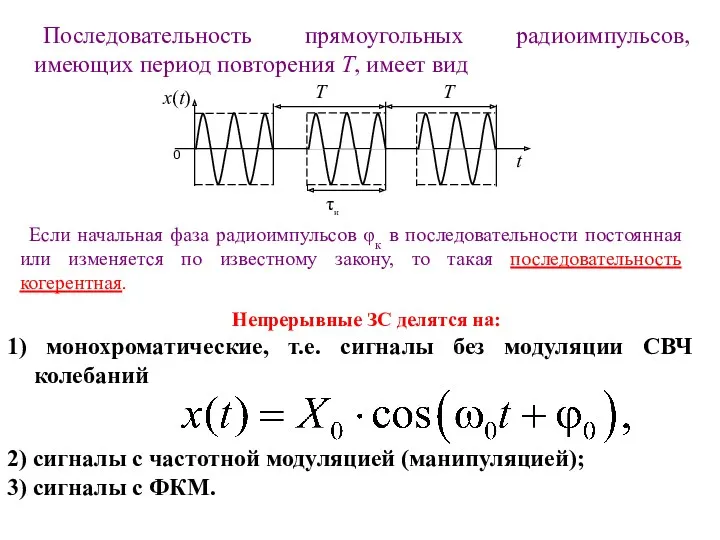
Последовательность прямоугольных радиоимпульсов, имеющих период повторения T, имеет вид
Если начальная
Последовательность прямоугольных радиоимпульсов, имеющих период повторения T, имеет вид
Если начальная
Выводы по первому вопросу
1.Таким образом, для решения задач РЛ применяются различные
Выводы по первому вопросу
1.Таким образом, для решения задач РЛ применяются различные
Вопрос 2
Основные характеристики
зондирующих сигналов
Вопрос 2
Основные характеристики
зондирующих сигналов
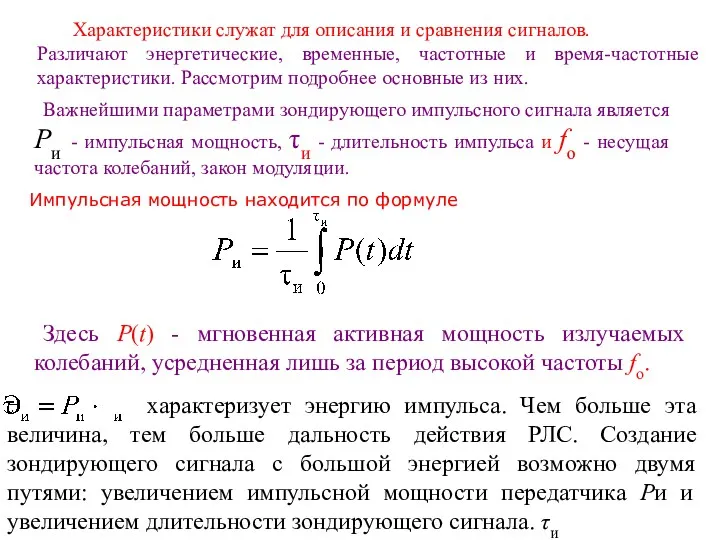
Характеристики служат для описания и сравнения сигналов.
Различают энергетические, временные, частотные
Характеристики служат для описания и сравнения сигналов.
Различают энергетические, временные, частотные
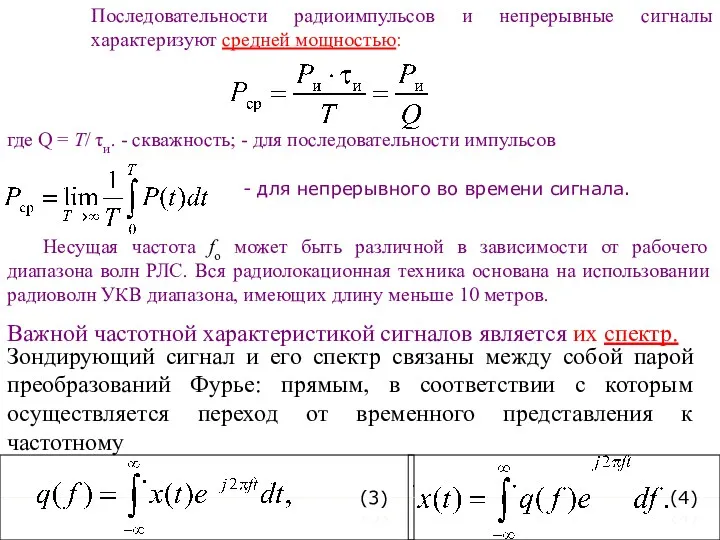
Последовательности радиоимпульсов и непрерывные сигналы характеризуют средней мощностью:
где Q =
Последовательности радиоимпульсов и непрерывные сигналы характеризуют средней мощностью:
где Q =
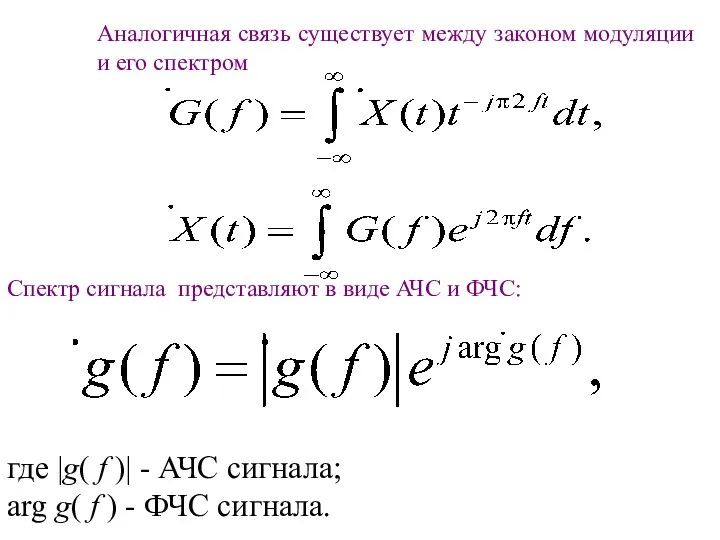
Аналогичная связь существует между законом модуляции и его спектром
Спектр сигнала
Аналогичная связь существует между законом модуляции и его спектром
Спектр сигнала
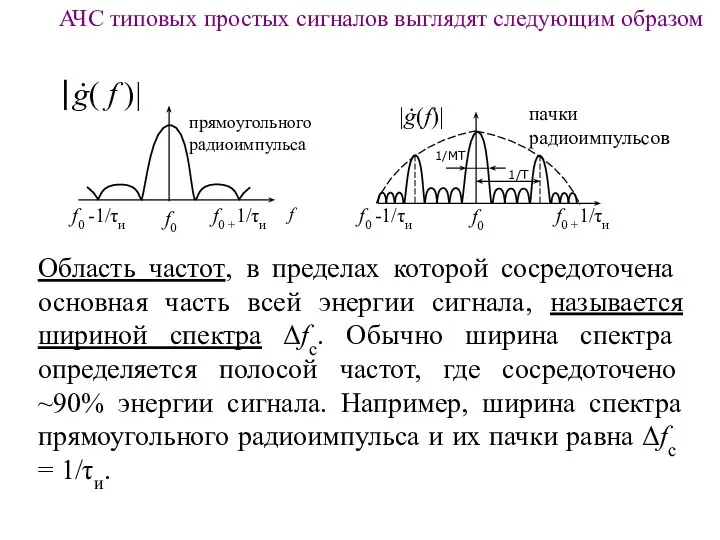
АЧС типовых простых сигналов выглядят следующим образом
Область частот, в пределах
АЧС типовых простых сигналов выглядят следующим образом
Область частот, в пределах
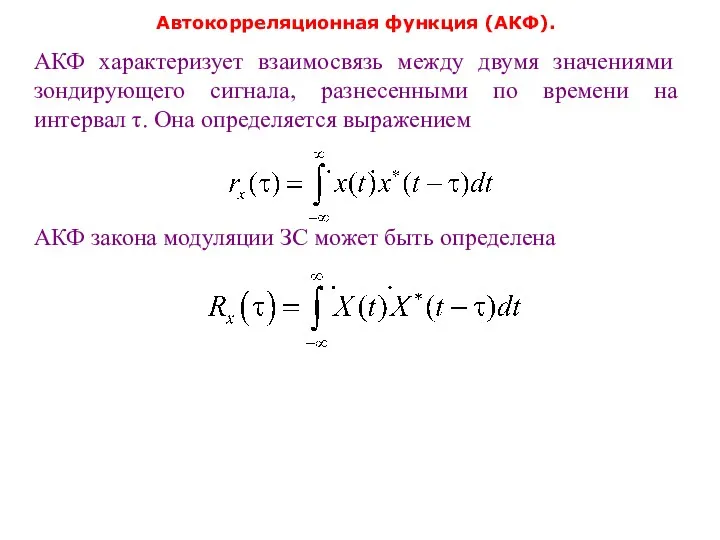
Автокорреляционная функция (АКФ).
АКФ характеризует взаимосвязь между двумя значениями зондирующего сигнала,
Автокорреляционная функция (АКФ).
АКФ характеризует взаимосвязь между двумя значениями зондирующего сигнала,
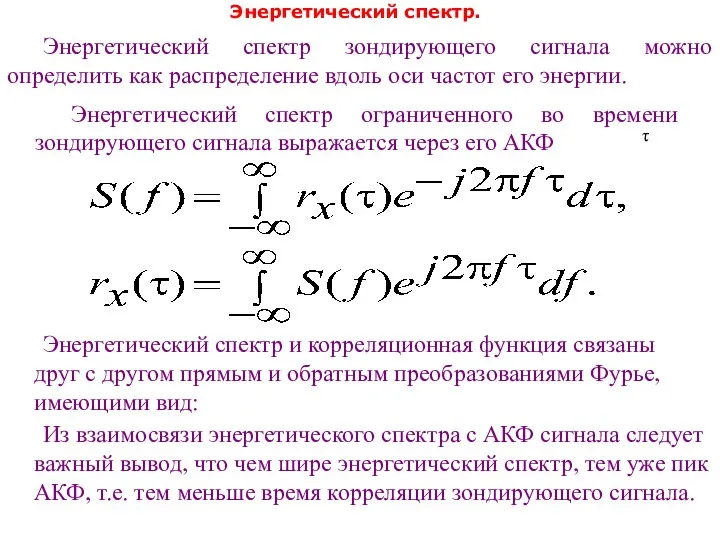
Энергетический спектр.
Энергетический спектр зондирующего сигнала можно определить как распределение вдоль
Энергетический спектр.
Энергетический спектр зондирующего сигнала можно определить как распределение вдоль
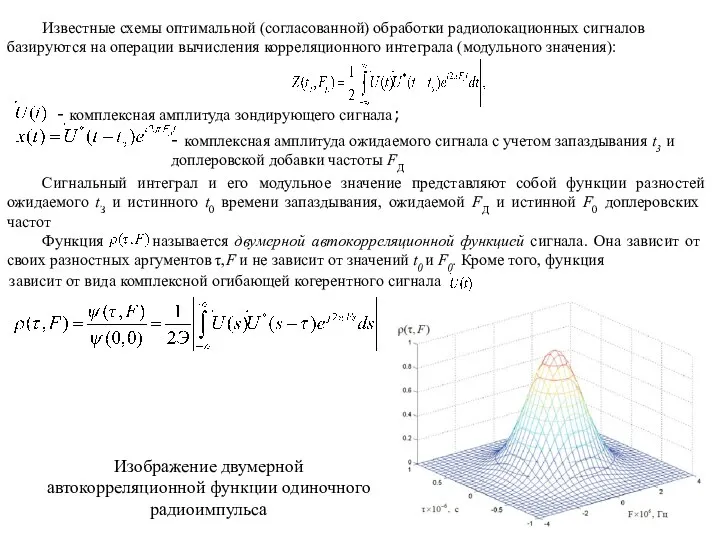
Известные схемы оптимальной (согласованной) обработки радиолокационных сигналов базируются на операции вычисления
Известные схемы оптимальной (согласованной) обработки радиолокационных сигналов базируются на операции вычисления
Выводы по второму вопросу
1. Таким образом, к основным характеристикам зондирующих сигналов
Выводы по второму вопросу
1. Таким образом, к основным характеристикам зондирующих сигналов
Вопрос 3
Сложные энергоёмкие
сигналы
Вопрос 3
Сложные энергоёмкие
сигналы
В настоящее время в радиолокации широко используются два вида сложных сигналов:
В настоящее время в радиолокации широко используются два вида сложных сигналов:
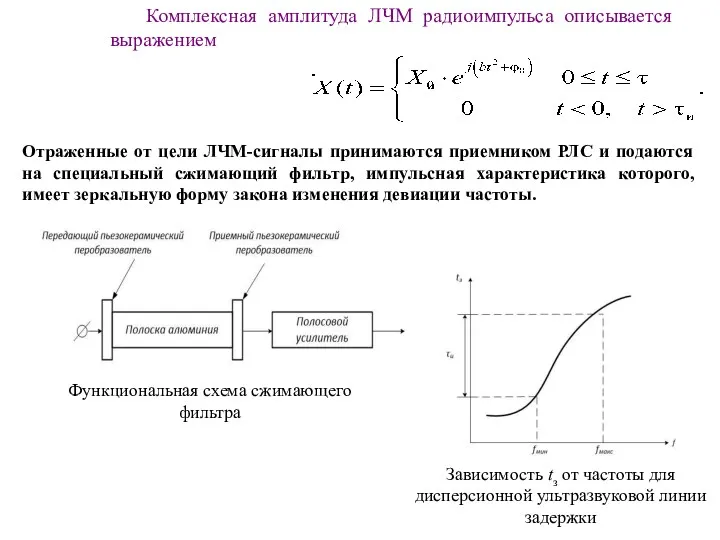
Комплексная амплитуда ЛЧМ радиоимпульса описывается выражением
Функциональная схема сжимающего фильтра
Зависимость tз
Комплексная амплитуда ЛЧМ радиоимпульса описывается выражением
Функциональная схема сжимающего фильтра
Зависимость tз
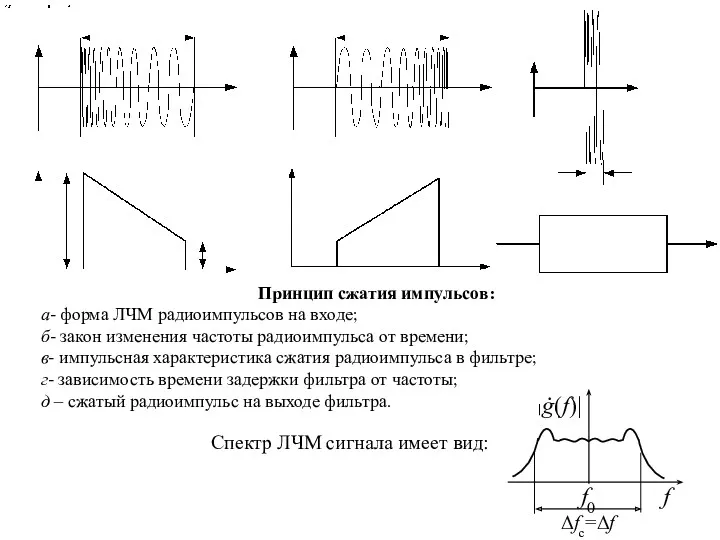
Принцип сжатия импульсов:
а- форма ЛЧМ радиоимпульсов на входе;
б- закон изменения частоты
Принцип сжатия импульсов:
а- форма ЛЧМ радиоимпульсов на входе;
б- закон изменения частоты
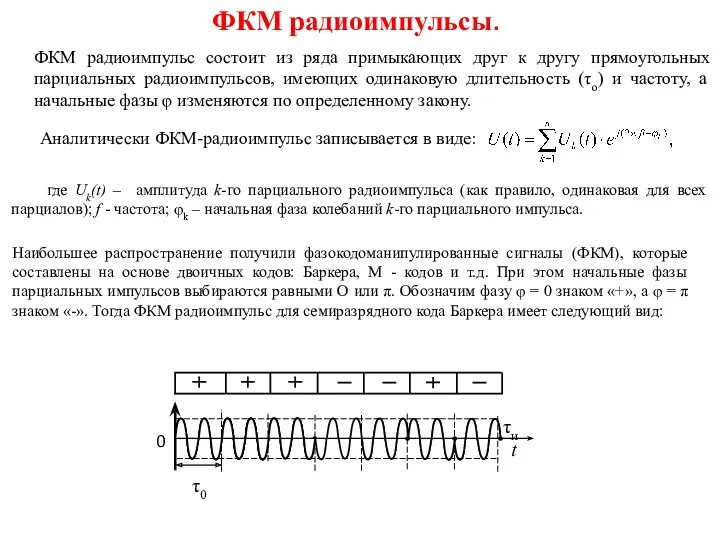
ФКМ радиоимпульсы.
ФКМ радиоимпульс состоит из ряда примыкающих друг к другу
ФКМ радиоимпульсы.
ФКМ радиоимпульс состоит из ряда примыкающих друг к другу
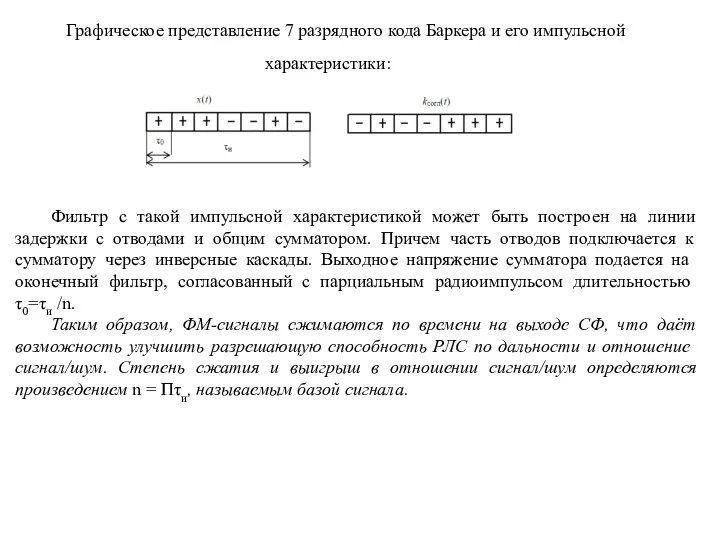
Фильтр с такой импульсной характеристикой может быть построен на линии задержки
Фильтр с такой импульсной характеристикой может быть построен на линии задержки
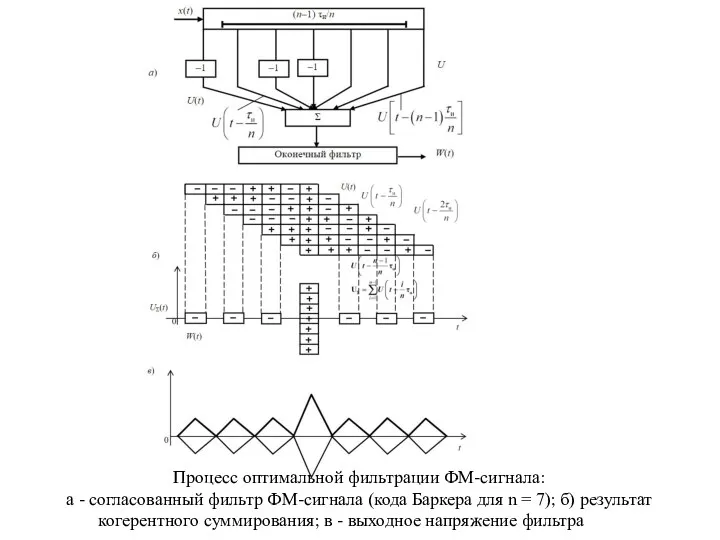
Процесс оптимальной фильтрации ФМ-сигнала:
а - согласованный фильтр ФМ-сигнала (кода Баркера
Процесс оптимальной фильтрации ФМ-сигнала:
а - согласованный фильтр ФМ-сигнала (кода Баркера
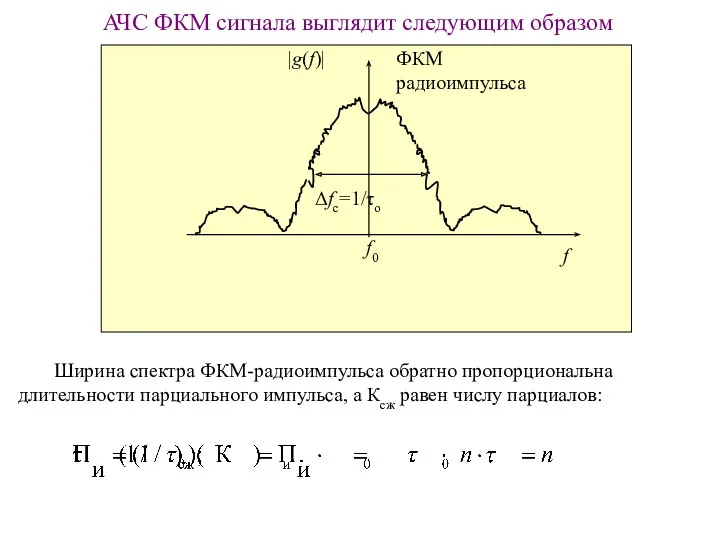
АЧС ФКМ сигнала выглядит следующим образом
Δfс=1/τо
Ширина спектра ФКМ-радиоимпульса обратно пропорциональна длительности
АЧС ФКМ сигнала выглядит следующим образом
Δfс=1/τо
Ширина спектра ФКМ-радиоимпульса обратно пропорциональна длительности
Выводы по третьему вопросу
Таким образом, основными широкополосными сигналами, применяемыми в РЛС,
Выводы по третьему вопросу
Таким образом, основными широкополосными сигналами, применяемыми в РЛС,
Для решения задач РЛ применяются различные виды ЗС: импульсные, непрерывные,
Для решения задач РЛ применяются различные виды ЗС: импульсные, непрерывные,
Отработать материал лекции в соответствии с рекомендованной литературой:
Л 1/о, с.37-43,
Отработать материал лекции в соответствии с рекомендованной литературой:
Л 1/о, с.37-43,
 ТЭЛА и тромбофлебит
ТЭЛА и тромбофлебит Ледоколы – покорители Арктики
Ледоколы – покорители Арктики Бюджетная система США
Бюджетная система США Contrastive lexicology 7. Mass media language: functions and interpretation
Contrastive lexicology 7. Mass media language: functions and interpretation Декабристы в Петровск-Забайкальском
Декабристы в Петровск-Забайкальском Игровые технологоии с детьми раннего возраста по ФГОС ДО
Игровые технологоии с детьми раннего возраста по ФГОС ДО Знаменитые люди Кузбасса
Знаменитые люди Кузбасса презентация Ученик года
презентация Ученик года Теория и практика составления шихт для керамических масс
Теория и практика составления шихт для керамических масс My city. Landmarks in town Donetsk
My city. Landmarks in town Donetsk Загальні відомості і характеристики антенних систем
Загальні відомості і характеристики антенних систем Nice to meet you!
Nice to meet you! Презентация Психолого-педагогическое сопровождение ребенка как одно из условий для обновления содержания образования
Презентация Психолого-педагогическое сопровождение ребенка как одно из условий для обновления содержания образования Проведение анализа предприятия VMOST и GAP
Проведение анализа предприятия VMOST и GAP Олимпийские игры античного мира
Олимпийские игры античного мира Физиология переднего мозга. Физиология вегетативной нервной системы. Лекция 10
Физиология переднего мозга. Физиология вегетативной нервной системы. Лекция 10 Кеуде қуысының ашық жарақаты
Кеуде қуысының ашық жарақаты Сварка чугуна
Сварка чугуна Экономический и политический кризис начала 1920 годов. Переход к НЭПУ
Экономический и политический кризис начала 1920 годов. Переход к НЭПУ Жизнь и творчество Варлама Шаламова
Жизнь и творчество Варлама Шаламова Игра по творчеству Э. Грига. Сюита Пер Гюнт
Игра по творчеству Э. Грига. Сюита Пер Гюнт Компетентностно-ориентированные задачи по химии для 8 класса
Компетентностно-ориентированные задачи по химии для 8 класса Ручные стежки и строчки
Ручные стежки и строчки Информационный центр. Отчет по основным показателям работы за 2020год
Информационный центр. Отчет по основным показателям работы за 2020год Описание внешности и характера человека. Сочинение-описание
Описание внешности и характера человека. Сочинение-описание Спортивная гимнастика
Спортивная гимнастика Презентация Развитие детского творчества: Лимерики в работе с детьми разновозрастной интегративной группы
Презентация Развитие детского творчества: Лимерики в работе с детьми разновозрастной интегративной группы Пошаговая инструкция для изготовления сумочки Совушка
Пошаговая инструкция для изготовления сумочки Совушка