- Лекція 112. Сліпі швидкості. Вобуляція

Содержание
- 2. СЛЕПЫЕ СКОРОСТИ ЦЕЛИ П р и ч и н а в о з н и к
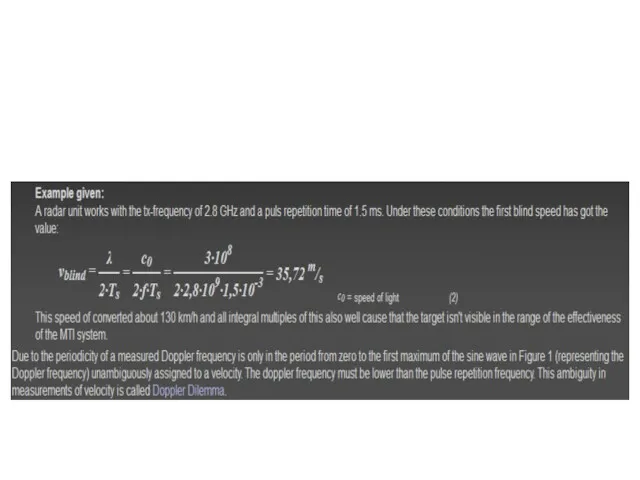
- 3. Связь слепой скорости и сдвига Доплера
- 4. Фазовый сдвиг между напpяжением когеpентного гетеpодина и обоими импульсами остается одинаковым. Поэтому на выходе фазового детектоpа
- 5. Соответствующую pадиальную скоpость называют «с л е п о й»: Vсл = (n λ /2) /
- 6. БОРЬБА СО СЛЕПЫМИ СКОРОСТЯМИ М е т о д в о б у л я ц
- 7. М е т о д p а з н о с а ч а с т
- 9. М Е Т О Д Ы З А Щ И Т Ы Р Л С О
- 10. Различают помехи двух видов: шумы приемного устройства РЛС и помехи, создаваемые внешними источниками. Внешние помехи делятся
- 11. По характеру колебаний помехи делятся на непрерывные (флуктуационная помеха, непрерывное модулирование или немодулиро-ванные колебания) и импульсные
- 12. Принципиально защита от помех базируется на отличии параметров полезных сигналов от мешающих. При этом для борьбы
- 13. Защита от естественных, взаимных и организационных помех, сходных по структуре с зондирующими сигналами, требует применения специальных
- 14. Их можно разделить на три обобщенные группы, обеспечивающие селекцию сигналов, компенсацию радиопомех и защиту приемников РЛС
- 15. Примером может служить система автоматической стабилизации уровня шума, поддерживающая неизменным уровень ложных тревог при действии широкополосных
- 16. СЕЛЕКЦИЯ СИГНАЛОВ Различают первичную, вторичную и функциональную селекции. Первичную селекцию полез-ного сигнала из его смеси с
- 17. Существуют следующие виды первичной селекции: пространственная, поляризационная, частотно-фазовая, временная, амплитудная, структурная.
- 18. Пространственная селекция осуществляется антенной системой РЛС. Чем уже ДНА и меньше уровень боковых лепестков, тем сильнее
- 19. Для борьбы с пассивными помехами от метеобразований используют поляризационную селекцию. В ее основе лежит различие эффективной
- 20. Такой сигнал является ортогональным по отношению к излученному и существенно подавляется в антенно-волноводном тракте РЛС. Волна,
- 21. Применение круговой поляризации в РЛС увеличивает отношение сигнал-помеха для слабого дождя на 25—30 дБ. С возрастанием
- 22. Первичная частотно-фазовая селекция основывается на различии частотно-фазовых характеристик принимаемых сигналов и действующих помех. При этом используются
- 23. К частотной селекции относятся методы, основанные на изменении несущей частоты и частоты следования зондирующих импульсов. Наиболее
- 24. Устройства временной селекции, осуществляющие сравнение по длительности импульсов, по частоте повторения и по времени их появления
- 25. Устройства с амплитудной селекцией предназначены для борьбы с флуктуирующими помехами типа белого шума и с хаотическими
- 26. Структурная селекция опирается на особенности модуляции сигналов РЛС. Примером ее реализации служит используемый метод сжатия в
- 27. Вторичная селекция связана с контролем сопутствующих параметров сигнала. Различают частотную, фазовую, временную, амплитудную, структурную вторичные селекции.
- 28. Функциональная селекция осуществляется на этапе третичной обработки информации в видеотракте РЛС и связана, как правило, со
- 30. Скачать презентацию
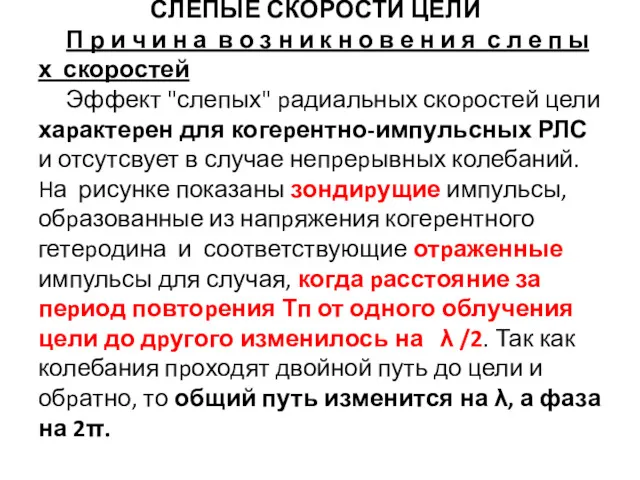
СЛЕПЫЕ СКОРОСТИ ЦЕЛИ
П р и ч и н а
СЛЕПЫЕ СКОРОСТИ ЦЕЛИ П р и ч и н а
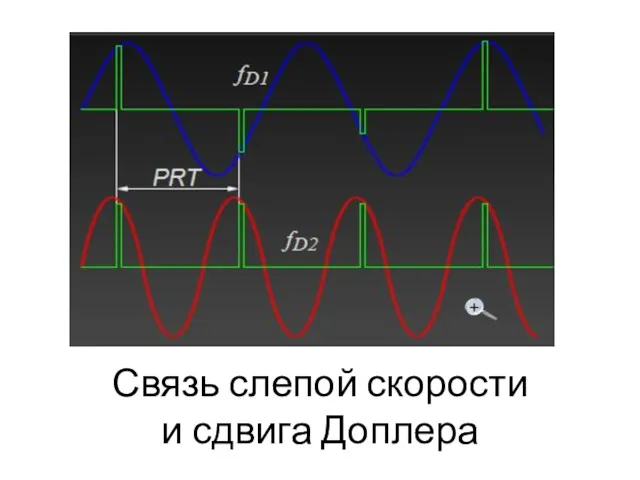
Связь слепой скорости
и сдвига Доплера
Связь слепой скорости
и сдвига Доплера
Фазовый сдвиг между напpяжением когеpентного гетеpодина и обоими импульсами остается одинаковым.
Фазовый сдвиг между напpяжением когеpентного гетеpодина и обоими импульсами остается одинаковым.
Соответствующую pадиальную скоpость называют «с л е п о й»:
Vсл
Соответствующую pадиальную скоpость называют «с л е п о й»: Vсл
БОРЬБА СО СЛЕПЫМИ СКОРОСТЯМИ
М е т о д в о
БОРЬБА СО СЛЕПЫМИ СКОРОСТЯМИ М е т о д в о
М е т о д p а з н о с
М е т о д p а з н о с
М Е Т О Д Ы З А Щ И Т
М Е Т О Д Ы З А Щ И Т
Различают помехи двух видов: шумы приемного устройства РЛС и помехи, создаваемые
Различают помехи двух видов: шумы приемного устройства РЛС и помехи, создаваемые
По характеру колебаний помехи делятся на непрерывные (флуктуационная помеха, непрерывное модулирование
По характеру колебаний помехи делятся на непрерывные (флуктуационная помеха, непрерывное модулирование
Принципиально защита от помех базируется на отличии параметров полезных сигналов от
Принципиально защита от помех базируется на отличии параметров полезных сигналов от
Защита от естественных, взаимных и организационных помех, сходных по структуре с
Защита от естественных, взаимных и организационных помех, сходных по структуре с
Их можно разделить на три обобщенные группы, обеспечивающие селекцию сигналов, компенсацию
Их можно разделить на три обобщенные группы, обеспечивающие селекцию сигналов, компенсацию
Примером может служить система автоматической стабилизации уровня шума, поддерживающая неизменным уровень
Примером может служить система автоматической стабилизации уровня шума, поддерживающая неизменным уровень
СЕЛЕКЦИЯ СИГНАЛОВ
Различают первичную, вторичную и функциональную селекции. Первичную селекцию полез-ного
СЕЛЕКЦИЯ СИГНАЛОВ Различают первичную, вторичную и функциональную селекции. Первичную селекцию полез-ного
Существуют следующие виды первичной селекции: пространственная, поляризационная, частотно-фазовая, временная, амплитудная, структурная.
Существуют следующие виды первичной селекции: пространственная, поляризационная, частотно-фазовая, временная, амплитудная, структурная.
Пространственная селекция осуществляется антенной системой РЛС. Чем уже ДНА и меньше
Пространственная селекция осуществляется антенной системой РЛС. Чем уже ДНА и меньше
Для борьбы с пассивными помехами от метеобразований используют поляризационную селекцию. В
Для борьбы с пассивными помехами от метеобразований используют поляризационную селекцию. В
Такой сигнал является ортогональным по отношению к излученному и существенно подавляется
Такой сигнал является ортогональным по отношению к излученному и существенно подавляется
Применение круговой поляризации в РЛС увеличивает отношение сигнал-помеха для слабого дождя
Применение круговой поляризации в РЛС увеличивает отношение сигнал-помеха для слабого дождя
Первичная частотно-фазовая селекция основывается на различии частотно-фазовых характеристик принимаемых сигналов и
Первичная частотно-фазовая селекция основывается на различии частотно-фазовых характеристик принимаемых сигналов и
К частотной селекции относятся методы, основанные на изменении несущей частоты и
К частотной селекции относятся методы, основанные на изменении несущей частоты и
Устройства временной селекции, осуществляющие сравнение по длительности импульсов, по частоте
Устройства временной селекции, осуществляющие сравнение по длительности импульсов, по частоте
Устройства с амплитудной селекцией предназначены для борьбы с флуктуирующими помехами типа
Устройства с амплитудной селекцией предназначены для борьбы с флуктуирующими помехами типа
Структурная селекция опирается на особенности модуляции сигналов РЛС. Примером ее реализации
Структурная селекция опирается на особенности модуляции сигналов РЛС. Примером ее реализации
Вторичная селекция связана с контролем сопутствующих параметров сигнала. Различают частотную, фазовую,
Вторичная селекция связана с контролем сопутствующих параметров сигнала. Различают частотную, фазовую,
Функциональная селекция осуществляется на этапе третичной обработки информации в видеотракте РЛС
Функциональная селекция осуществляется на этапе третичной обработки информации в видеотракте РЛС
 Кировская область. Участник конкурса Лучшая семейная животноводческая ферма 2017 года
Кировская область. Участник конкурса Лучшая семейная животноводческая ферма 2017 года Б английский 13.04
Б английский 13.04 Выделение нуклеиновых кислот из различного клинического материала. ПЦР и электрофорез в медицинской генетике
Выделение нуклеиновых кислот из различного клинического материала. ПЦР и электрофорез в медицинской генетике Источники права в Португальской Республике
Источники права в Португальской Республике Оборудование предприятий торговли. Погрузочно-разгрузочное оборудование
Оборудование предприятий торговли. Погрузочно-разгрузочное оборудование Обучение первой помощи
Обучение первой помощи Симметрия многогранников
Симметрия многогранников МЕТОДИЧЕСКИЕ ОСНОВЫ ОБУЧЕНИЯ ДЕТЕЙ С ОТКЛОНЕНИЯМИ В ЭМОЦИОНАЛЬНОМ РАЗВИТИИ ПЕРЕСКАЗУ СКАЗОК И КОРОТКИХ РАССКАЗОВ
МЕТОДИЧЕСКИЕ ОСНОВЫ ОБУЧЕНИЯ ДЕТЕЙ С ОТКЛОНЕНИЯМИ В ЭМОЦИОНАЛЬНОМ РАЗВИТИИ ПЕРЕСКАЗУ СКАЗОК И КОРОТКИХ РАССКАЗОВ Уильям Шекспир
Уильям Шекспир Рассказ ученицы о военных подвигах своего деда
Рассказ ученицы о военных подвигах своего деда Долг и совесть
Долг и совесть Задумайтесь-презентация о школьной форме
Задумайтесь-презентация о школьной форме Промышленные предприятия Витебской области
Промышленные предприятия Витебской области Ансамбль казачей песни Криница
Ансамбль казачей песни Криница Сословия, быт, обычаи и нравы в XVII веке
Сословия, быт, обычаи и нравы в XVII веке Как стать здоровым и успешным. Памятка школьнику.
Как стать здоровым и успешным. Памятка школьнику. цитология
цитология Наука о природе лесных пожаров и их последствий
Наука о природе лесных пожаров и их последствий Законы действия постоянного тока на возбудимые ткани
Законы действия постоянного тока на возбудимые ткани Коэволюция природы и общества
Коэволюция природы и общества Подготовка к ГИА. Решение текстовых задач
Подготовка к ГИА. Решение текстовых задач Макеты, технические требования, контрольный образец. Лекция 16
Макеты, технические требования, контрольный образец. Лекция 16 ОРКСЭ Основы православной культуры 4 класс. Урок Милосердие и сострадание
ОРКСЭ Основы православной культуры 4 класс. Урок Милосердие и сострадание Иерархическая структура и деревья
Иерархическая структура и деревья Умножение десятичных дробей. Правила умножения
Умножение десятичных дробей. Правила умножения Радиостанция комплекса Vertex VX-4200. (Тема 4.7)
Радиостанция комплекса Vertex VX-4200. (Тема 4.7) Пензенский государственный университет. Кафедра Экономическая теория и международные отношения
Пензенский государственный университет. Кафедра Экономическая теория и международные отношения Сущность и типы конфликтов на уровне организации
Сущность и типы конфликтов на уровне организации