- Лекція 22. FM-CW радар неперервної дії. FM-CW continuous wave radar. (FM-CW radar)

Содержание
- 2. РЛС с модулированным непрерывным излучением РЛС с частотно-модулированным непрерывным излучением (FM-CW) предназначены для измерения небольших расстояний.
- 3. Этот вид РЛС часто используется в качестве "радиолокационного высотомера" для измерения точной высоты при посадке самолетов.
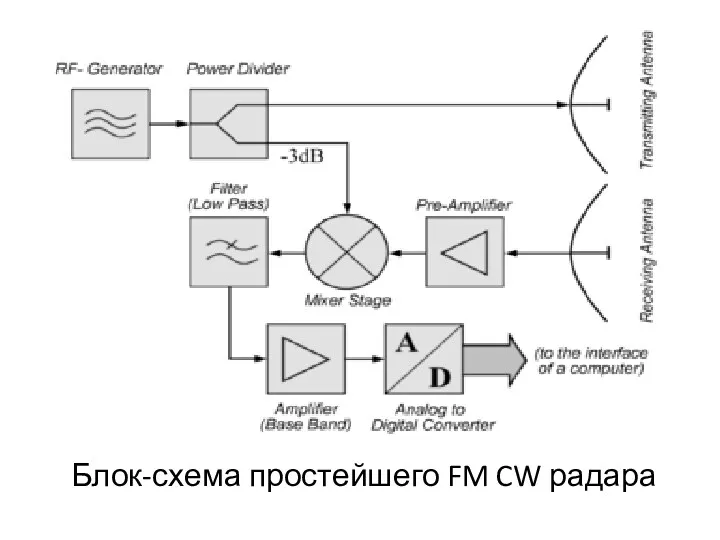
- 4. Блок-схема простейшего FM CW радара
- 5. В этой системе передаваемый сигнал с известной стабильной частотой непрерывной волны изменяется вверх и вниз по
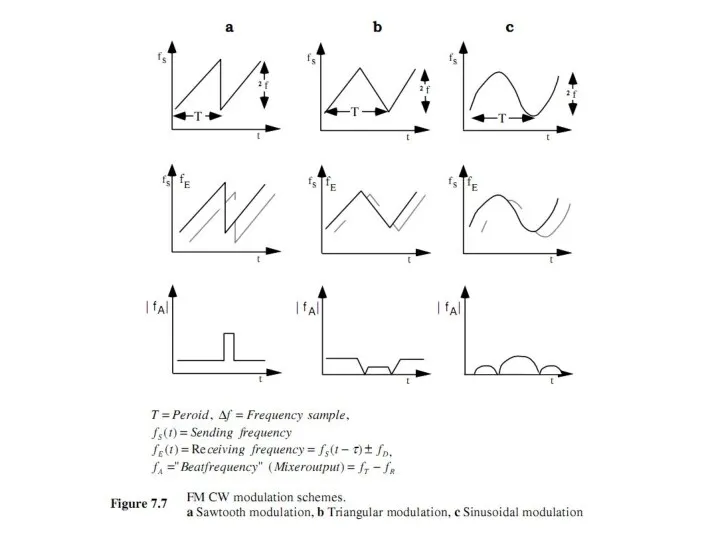
- 6. Возможны разные модуляции и частота передатчика может изменяться следующим образом: - Синусоидально; - Пилообразно; - Треугольно;
- 7. Дальность ограничивается 1/4 длины волны модуляции излучаемого сигнала. Дальность для частоты модуляции 100 Гц будет 500
- 8. РЛС будет давать неправильное расстояние для отражений на больших расстояниях пределами инструментального диапазона. Измерения дальности FMCW
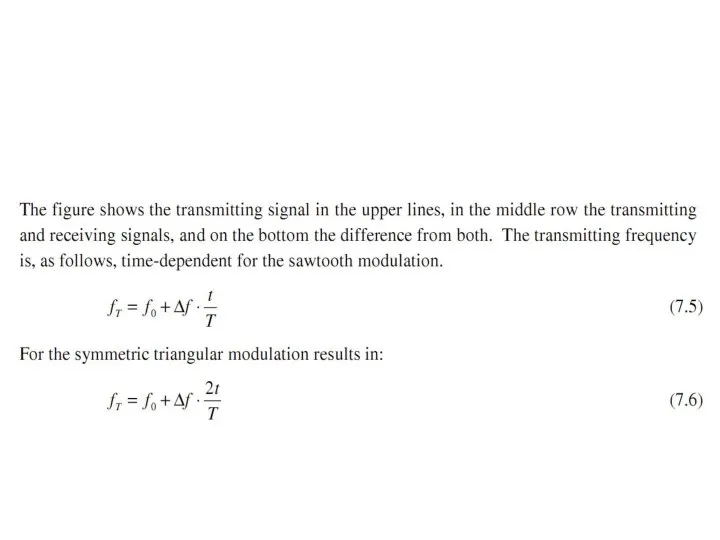
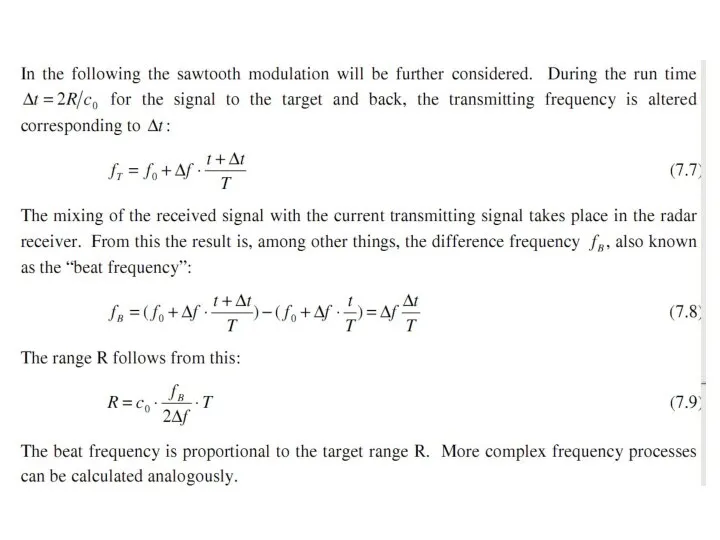
- 9. Пилообразная частотная модуляция
- 10. Измерение дальности с помощью FM-CW РЛС: если ошибкой, вызванной возможным доплеровским сдвигом можно пренебречь, и мощность
- 14. Разрешение по дальности FM CW радара
- 16. Скачать презентацию
РЛС с модулированным непрерывным излучением
РЛС с частотно-модулированным непрерывным излучением (FM-CW) предназначены
РЛС с модулированным непрерывным излучением РЛС с частотно-модулированным непрерывным излучением (FM-CW) предназначены
Этот вид РЛС часто используется в качестве "радиолокационного высотомера" для измерения
Этот вид РЛС часто используется в качестве "радиолокационного высотомера" для измерения
Блок-схема простейшего FM CW радара
Блок-схема простейшего FM CW радара
В этой системе передаваемый сигнал с известной стабильной частотой непрерывной волны
В этой системе передаваемый сигнал с известной стабильной частотой непрерывной волны
Возможны разные модуляции и частота передатчика может изменяться следующим образом:
-
Возможны разные модуляции и частота передатчика может изменяться следующим образом: -
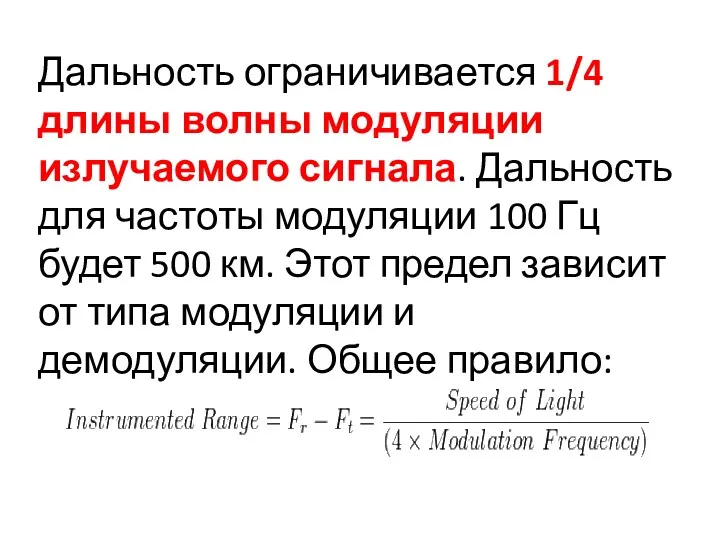
Дальность ограничивается 1/4 длины волны модуляции излучаемого сигнала. Дальность для частоты
Дальность ограничивается 1/4 длины волны модуляции излучаемого сигнала. Дальность для частоты
РЛС будет давать неправильное расстояние для отражений на больших расстояниях пределами
РЛС будет давать неправильное расстояние для отражений на больших расстояниях пределами
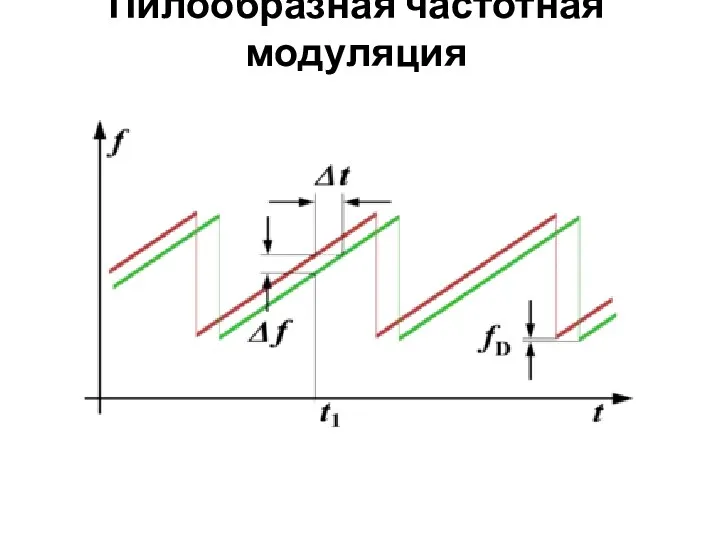
Пилообразная частотная модуляция
Пилообразная частотная модуляция
Измерение дальности
с помощью FM-CW РЛС:
если ошибкой, вызванной возможным доплеровским
Измерение дальности с помощью FM-CW РЛС: если ошибкой, вызванной возможным доплеровским
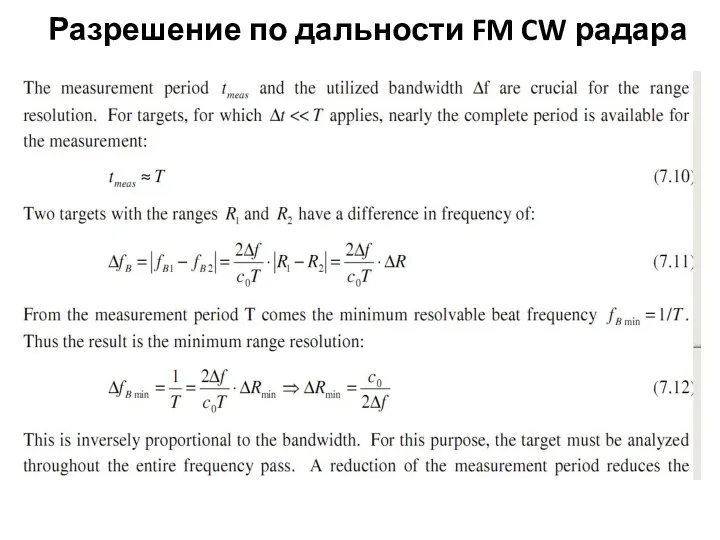
Разрешение по дальности FM CW радара
Разрешение по дальности FM CW радара
 Новые подходы к оцениванию образовательных результатов в рамках ФГОС
Новые подходы к оцениванию образовательных результатов в рамках ФГОС Диофант и неопределенные уравнения
Диофант и неопределенные уравнения Домашнее задание (китайский язык)
Домашнее задание (китайский язык) Всемирный День грамотности
Всемирный День грамотности Приметы осени
Приметы осени Исследовательский проект << Удивительные свойства воды>>
Исследовательский проект << Удивительные свойства воды>> Заболоцкий
Заболоцкий Этика как философская наука о морали
Этика как философская наука о морали Синдром фето-фетальной трансфузии. Диагностика и лечение синдрома фето-фетальной трансфузии
Синдром фето-фетальной трансфузии. Диагностика и лечение синдрома фето-фетальной трансфузии Елена Александровна Благинина
Елена Александровна Благинина Урок технологии изготовление обуви Сланцы
Урок технологии изготовление обуви Сланцы Логические модели представления знаний
Логические модели представления знаний Параллельные прямые. Работа на готовых чертежах
Параллельные прямые. Работа на готовых чертежах Расчет воздухообмена в помещении. (Лекция 5)
Расчет воздухообмена в помещении. (Лекция 5) Иван Андреевич Крылов 1769-1844
Иван Андреевич Крылов 1769-1844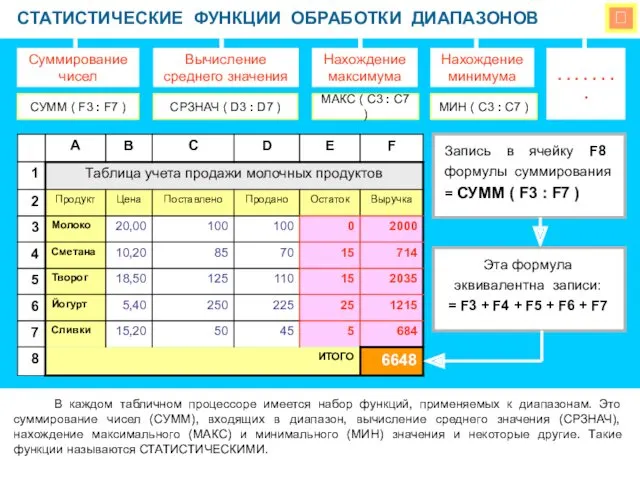 Статистические функции обработки диапазонов
Статистические функции обработки диапазонов Использование активных методов обучения на уроках химии
Использование активных методов обучения на уроках химии Реконструкция подстанции 35/10 кВ Песочная ПАО МРСК Центра Орелэнерго с разработкой релейной защиты отходящей ВЛ 10 кВ
Реконструкция подстанции 35/10 кВ Песочная ПАО МРСК Центра Орелэнерго с разработкой релейной защиты отходящей ВЛ 10 кВ БЫЛА ВОЙНА…
БЫЛА ВОЙНА… Основные принципы организации рационального питания в младшем школьном возрасте (презентация)
Основные принципы организации рационального питания в младшем школьном возрасте (презентация) Презентации по лексическим темам Овощи и Фрукты
Презентации по лексическим темам Овощи и Фрукты Презентация Зеркала
Презентация Зеркала Молоко: вред или польза
Молоко: вред или польза Хромосомная теория наследственности
Хромосомная теория наследственности Католическая церковь
Католическая церковь Книга Судей
Книга Судей Границы и структура биосферы. Компоненты, функции и живое вещество
Границы и структура биосферы. Компоненты, функции и живое вещество Схема функционального зонировани
Схема функционального зонировани