Механика космического полета с малой тягой в сильных гравитационных полях планет. Математические модели движения презентация
- Механика космического полета с малой тягой в сильных гравитационных полях планет. Математические модели движения

Содержание
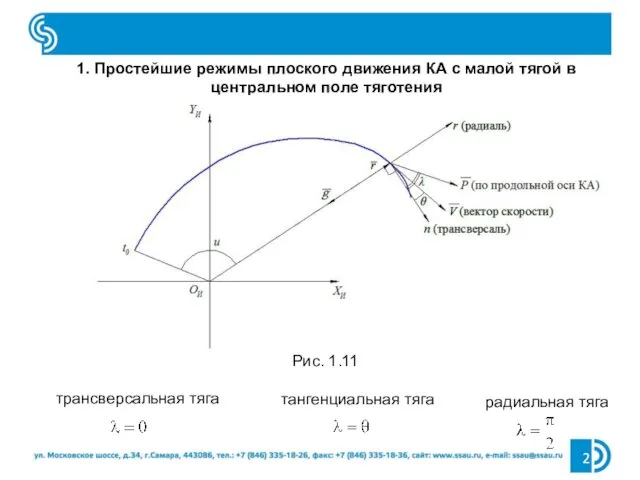
- 2. 1. Простейшие режимы плоского движения КА с малой тягой в центральном поле тяготения трансверсальная тяга тангенциальная
- 3. Траектория КА – многовитковая спираль θ - угол наклона траектории, λ – угол отклонения тяги от
- 4. «Парадокс разгона» с малой тягой Полная энергия поступательного движения центра масс КА (на единицу массы) (тангенциальная
- 5. Приближенные решения для случая трансверсальной тяги Допущения: Безразмерные (относительные) переменные Витки траектории до момента t ≈
- 6. Рис. 1.12
- 7. 2. Уравнения плоского движения КА в орбитальной системе координат (рис. 1.11) OTSW (onrb) OT – трансверсаль,
- 8. Рис. 1.13 2. Математическая модель движения КА в оскулирующих элементах Лекция 6. Математическая модель пространственного движения
- 9. Уравнения движения в оскулирующих элементах
- 10. Здесь p=A(1-e2) – фокальный параметр; ϑ = u – ω – истинная аномалия; e – эксцентриситет;
- 11. Рис. 1.14
- 12. Способы раздельного управления элементами орбиты
- 13. Частный случай: околокруговые многовитковые траектории (е ≈ 0) Радиальная составляющая реактивного ускорения S = 0. Трансверсальная
- 14. 3. Векторные уравнения движения центра масс КА в инерциальной (абсолютной) системе координат Здесь - гравитационное ускорение
- 15. Системы координат. Связь траекторного и углового движений Инерциальная (абсолютная) СК Траекторная СК Связанная СК Орбитальная СК
- 16. Кинематические уравнения ~ ОХ; ~ ОY; ~ ОZ (связанные оси). Для КА с непрерывно работающим ЭРД
- 17. Лекция 8. Выбор параметров околоземной орбиты старта при межорбитальных перелетах с малой тягой Выбор высоты орбиты
- 18. Модели плотности верхней атмосферы Земли «Статическая» модель (плотность зависит только от высоты H) 1) (изотермическая) 2)
- 19. k3 – сомножитель, отражающий полугодовые вариации плотности (зима - лето) k4 – сомножитель, учитывающий корреляции между
- 20. Рис. 1.16 а) б) в)
- 21. Справочная таблица плотности, ρ кг/м3 (Г.С. Нариманов, М.К. Тихонравов)
- 22. Лекция 9. Выбор параметров околоземной орбиты старта 2. Выбор оптимальной даты старта из условия минимума суммарного
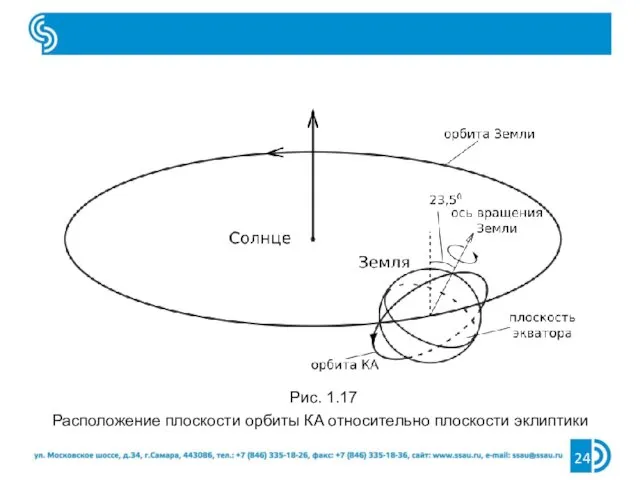
- 23. Физическая картина взаимного положения Солнца, Земли и КА при межорбитальных перелетах - плоскость орбиты КА постоянно
- 24. Расположение плоскости орбиты КА относительно плоскости эклиптики Рис. 1.17
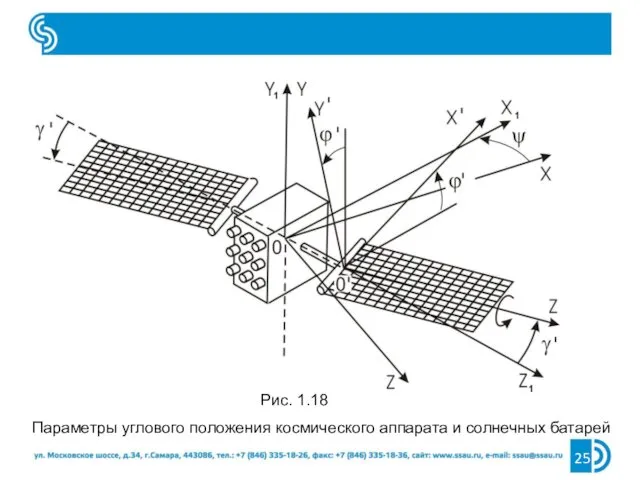
- 25. Параметры углового положения космического аппарата и солнечных батарей Рис. 1.18
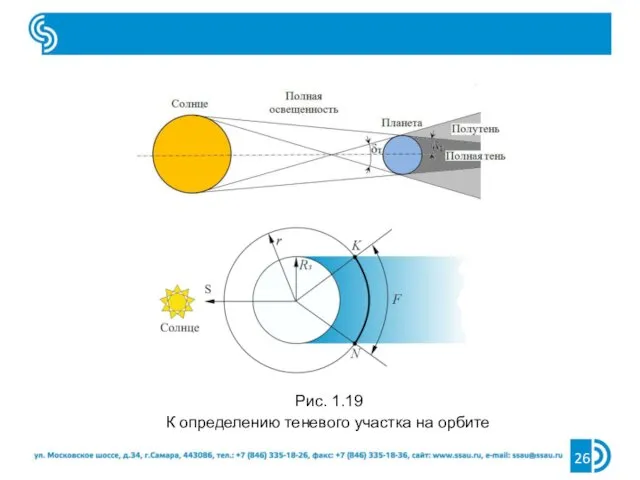
- 26. К определению теневого участка на орбите Рис. 1.19
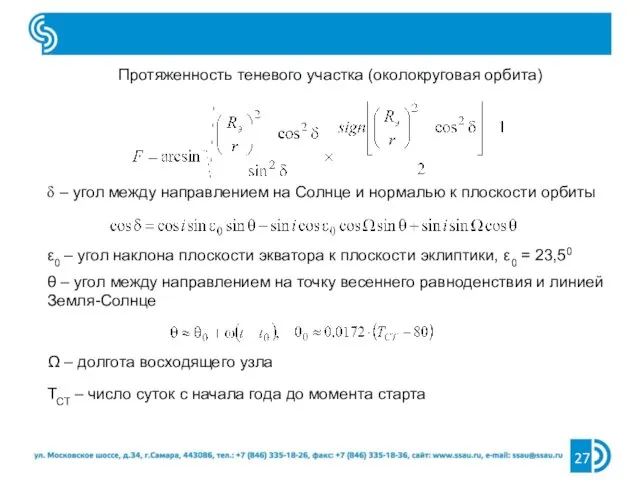
- 27. Протяженность теневого участка (околокруговая орбита) δ – угол между направлением на Солнце и нормалью к плоскости
- 28. Прецессия орбиты (изменение угла Ω) (i 900) Солнечно-синхронная орбита Синхронность эволюции плоскости орбиты (прецессия восходящего узла
- 29. Расчет суммарного времени затенения N – число витков траектории перелета Параметры расчета: ТСТ, Ω0 ТСТ –
- 31. Скачать презентацию
1. Простейшие режимы плоского движения КА с малой тягой в центральном
1. Простейшие режимы плоского движения КА с малой тягой в центральном

Траектория КА – многовитковая спираль
θ - угол наклона траектории, λ –
Траектория КА – многовитковая спираль
θ - угол наклона траектории, λ –
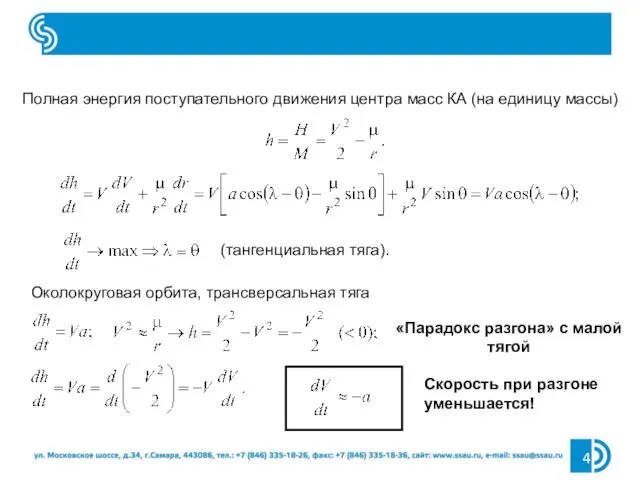
«Парадокс разгона» с малой тягой
Полная энергия поступательного движения центра масс КА
«Парадокс разгона» с малой тягой
Полная энергия поступательного движения центра масс КА
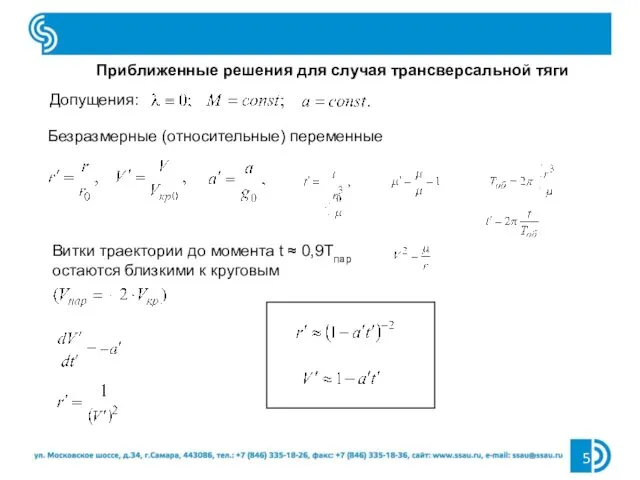
Приближенные решения для случая трансверсальной тяги
Допущения:
Безразмерные (относительные) переменные
Витки траектории до момента
Приближенные решения для случая трансверсальной тяги
Допущения:
Безразмерные (относительные) переменные
Витки траектории до момента
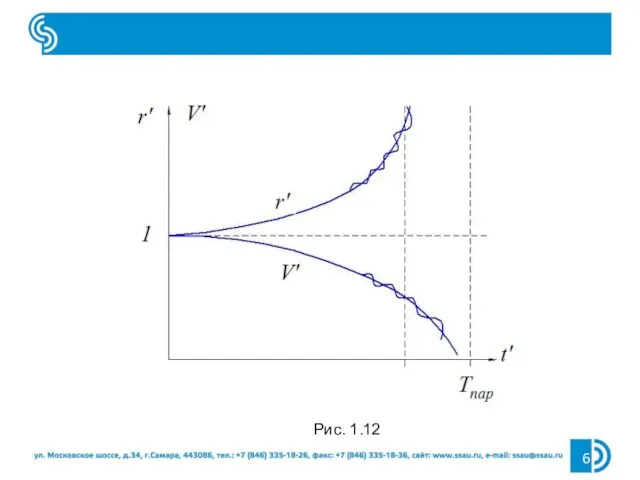
Рис. 1.12
Рис. 1.12
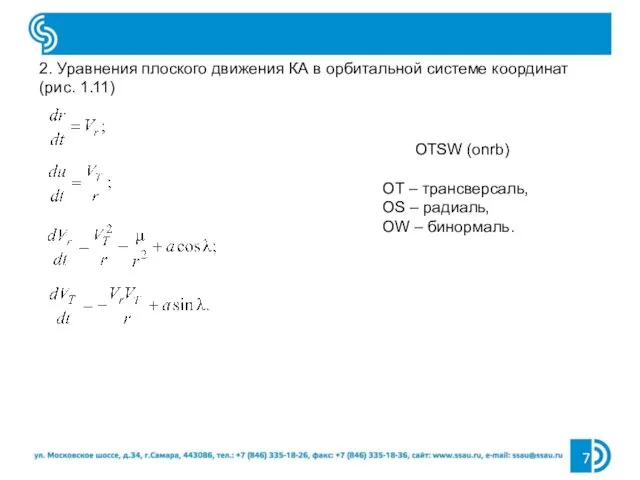
2. Уравнения плоского движения КА в орбитальной системе координат (рис. 1.11)
OTSW
2. Уравнения плоского движения КА в орбитальной системе координат (рис. 1.11)
OTSW

Рис. 1.13
2. Математическая модель движения КА в оскулирующих элементах
Лекция 6. Математическая
Рис. 1.13
2. Математическая модель движения КА в оскулирующих элементах
Лекция 6. Математическая
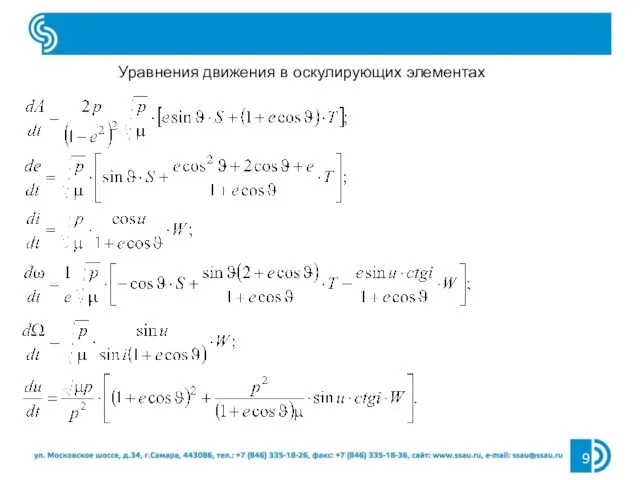
Уравнения движения в оскулирующих элементах
Уравнения движения в оскулирующих элементах
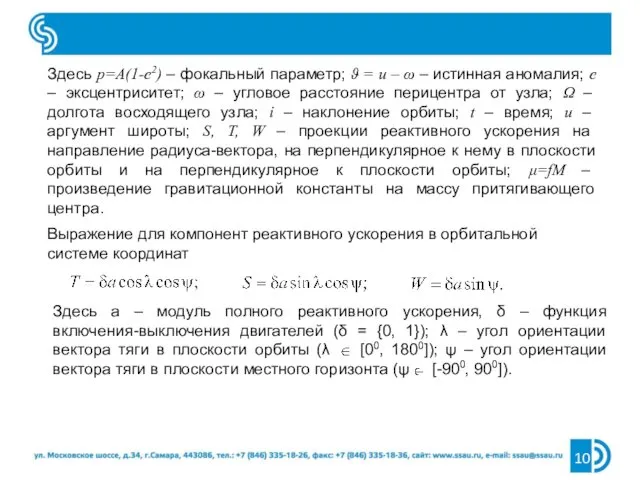
Здесь p=A(1-e2) – фокальный параметр; ϑ = u – ω –
Здесь p=A(1-e2) – фокальный параметр; ϑ = u – ω –
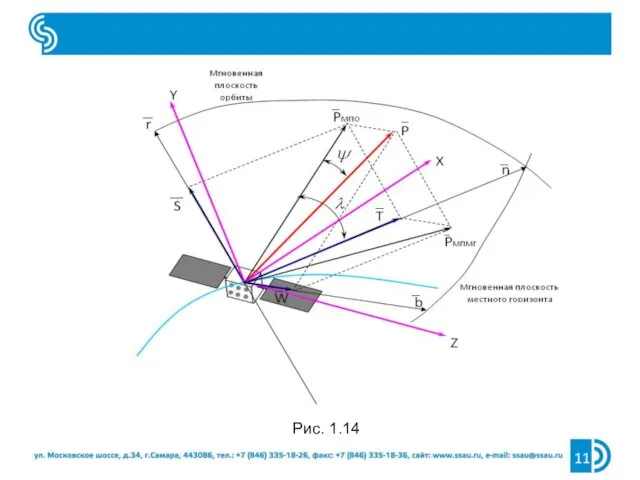
Рис. 1.14
Рис. 1.14
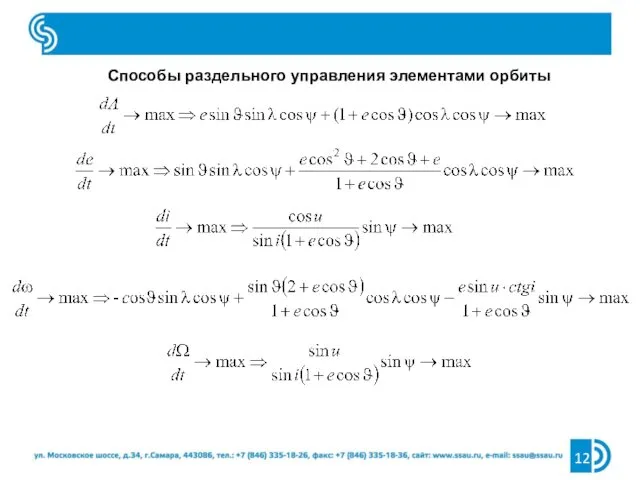
Способы раздельного управления элементами орбиты
Способы раздельного управления элементами орбиты
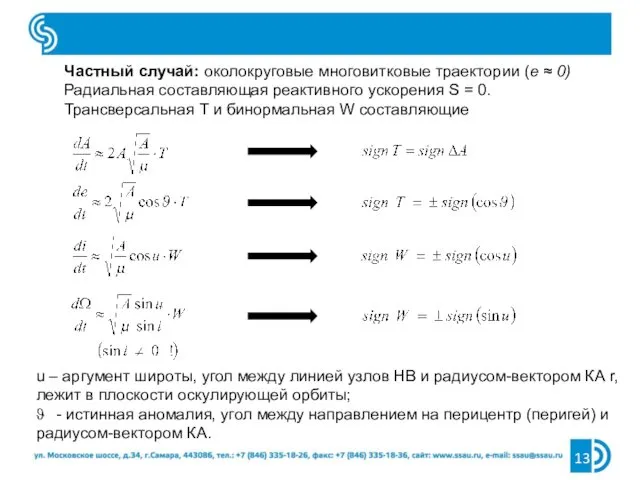
Частный случай: околокруговые многовитковые траектории (е ≈ 0)
Радиальная составляющая реактивного
Частный случай: околокруговые многовитковые траектории (е ≈ 0)
Радиальная составляющая реактивного
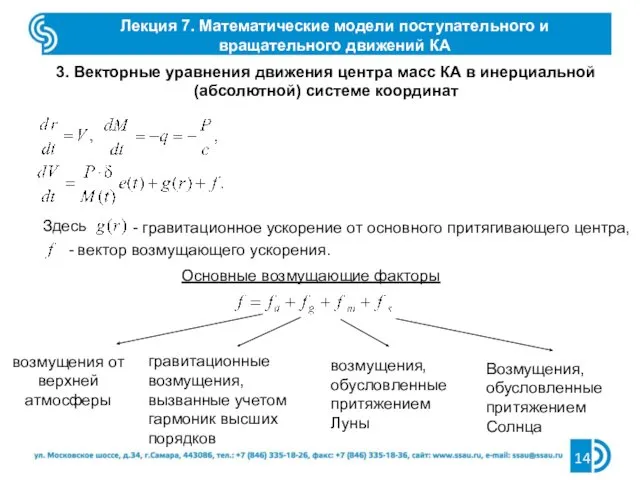
3. Векторные уравнения движения центра масс КА в инерциальной (абсолютной) системе
3. Векторные уравнения движения центра масс КА в инерциальной (абсолютной) системе
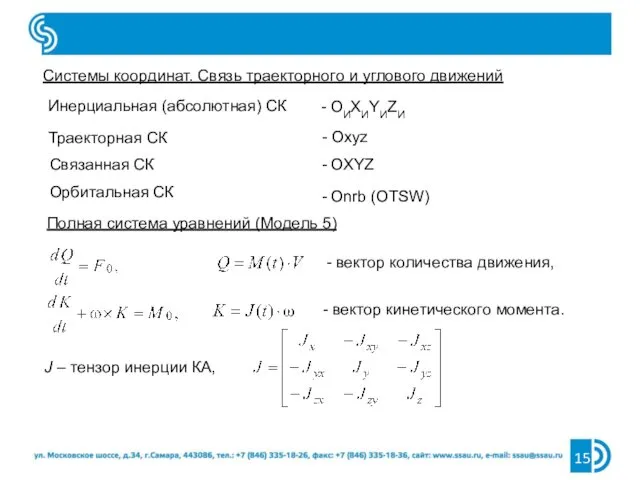
Системы координат. Связь траекторного и углового движений
Инерциальная (абсолютная) СК
Траекторная СК
Связанная
Системы координат. Связь траекторного и углового движений
Инерциальная (абсолютная) СК
Траекторная СК
Связанная
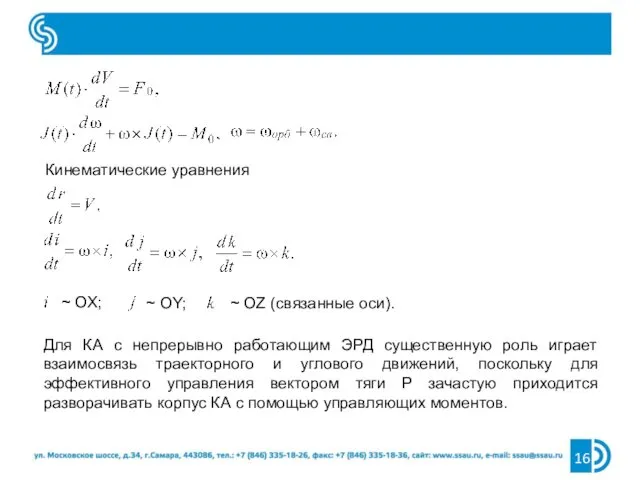
Кинематические уравнения
~ ОХ;
~ ОY;
~ ОZ (связанные оси).
Для КА с непрерывно работающим
Кинематические уравнения
~ ОХ;
~ ОY;
~ ОZ (связанные оси).
Для КА с непрерывно работающим
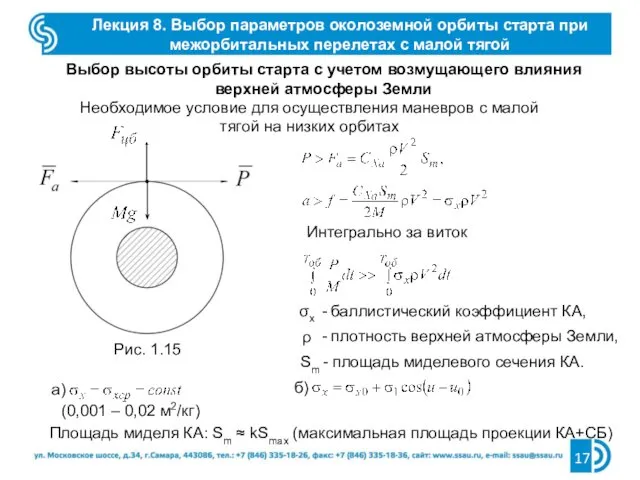
Лекция 8. Выбор параметров околоземной орбиты старта при межорбитальных перелетах с
Лекция 8. Выбор параметров околоземной орбиты старта при межорбитальных перелетах с
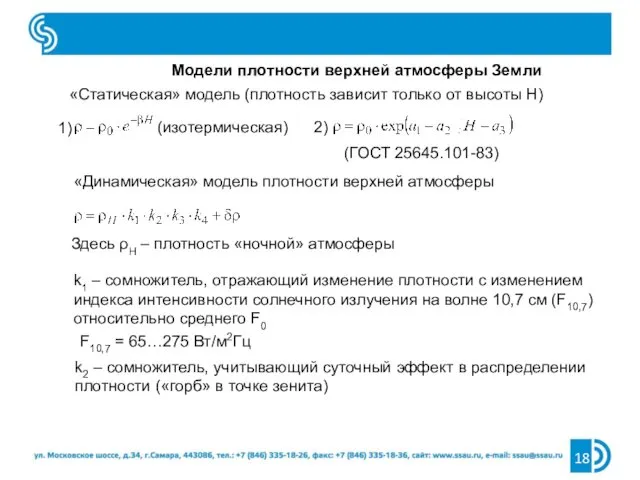
Модели плотности верхней атмосферы Земли
«Статическая» модель (плотность зависит только от высоты
Модели плотности верхней атмосферы Земли
«Статическая» модель (плотность зависит только от высоты
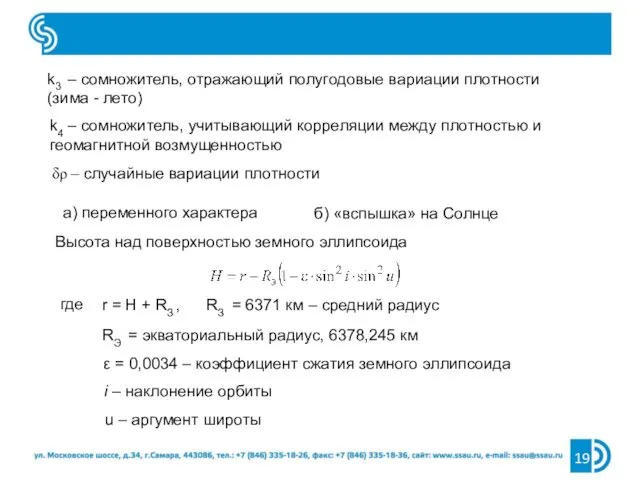
k3 – сомножитель, отражающий полугодовые вариации плотности (зима - лето)
k4 –
k3 – сомножитель, отражающий полугодовые вариации плотности (зима - лето)
k4 –
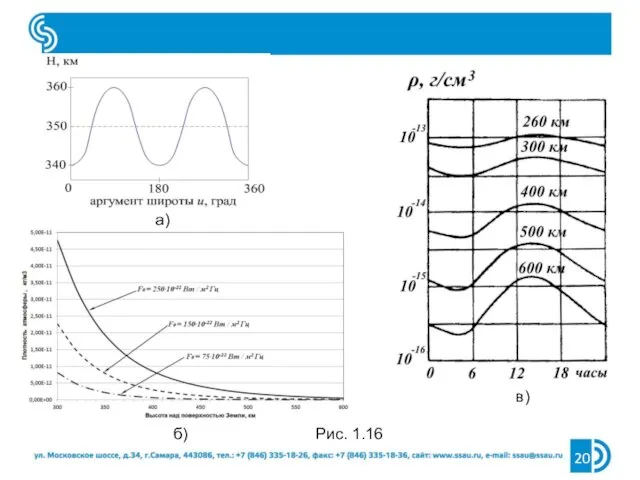
Рис. 1.16
а)
б)
в)
Рис. 1.16
а)
б)
в)
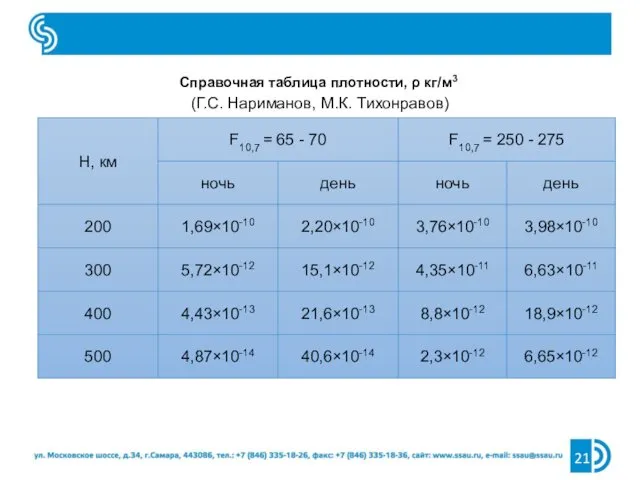
Справочная таблица плотности, ρ кг/м3
(Г.С. Нариманов, М.К. Тихонравов)
Справочная таблица плотности, ρ кг/м3
(Г.С. Нариманов, М.К. Тихонравов)
Лекция 9. Выбор параметров околоземной орбиты старта
2. Выбор оптимальной даты старта
Лекция 9. Выбор параметров околоземной орбиты старта
2. Выбор оптимальной даты старта
Физическая картина взаимного положения Солнца, Земли и КА при межорбитальных перелетах
-
Физическая картина взаимного положения Солнца, Земли и КА при межорбитальных перелетах
-
Расположение плоскости орбиты КА относительно плоскости эклиптики
Рис. 1.17
Расположение плоскости орбиты КА относительно плоскости эклиптики
Рис. 1.17
Параметры углового положения космического аппарата и солнечных батарей
Рис. 1.18
Параметры углового положения космического аппарата и солнечных батарей
Рис. 1.18
К определению теневого участка на орбите
Рис. 1.19
К определению теневого участка на орбите
Рис. 1.19
Протяженность теневого участка (околокруговая орбита)
δ – угол между направлением на Солнце
Протяженность теневого участка (околокруговая орбита)
δ – угол между направлением на Солнце
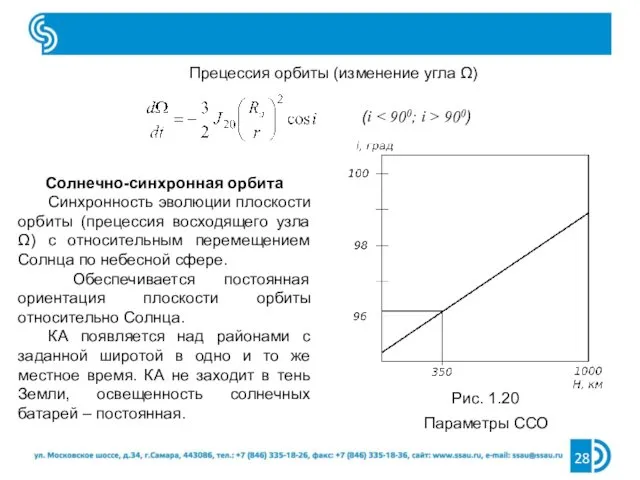
Прецессия орбиты (изменение угла Ω)
(i < 900; i > 900)
Солнечно-синхронная орбита
Синхронность
Прецессия орбиты (изменение угла Ω)
(i < 900; i > 900)
Солнечно-синхронная орбита
Синхронность
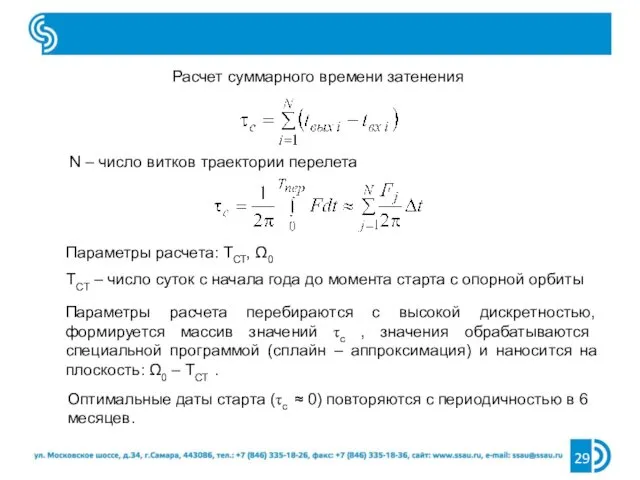
Расчет суммарного времени затенения
N – число витков траектории перелета
Параметры расчета: ТСТ,
Расчет суммарного времени затенения
N – число витков траектории перелета
Параметры расчета: ТСТ,
 Родительское собрание: Как воспитать уверенность ребёнка в себе
Родительское собрание: Как воспитать уверенность ребёнка в себе Ликвидация возможных аварийных ситуаций в резервуарном парке
Ликвидация возможных аварийных ситуаций в резервуарном парке Конспект открытого интегрированного занятия в подготовительной группе Путешествие в школу. Диск
Конспект открытого интегрированного занятия в подготовительной группе Путешествие в школу. Диск Болезни желудка и двенадцатиперстной кишки
Болезни желудка и двенадцатиперстной кишки Процессоры. Архитектура фон Неймана
Процессоры. Архитектура фон Неймана Наблюдения - основа астрономии
Наблюдения - основа астрономии Внеклассное мероприятие Путешествие по экологической тропе.
Внеклассное мероприятие Путешествие по экологической тропе. Паспорт комнатных растений
Паспорт комнатных растений Скульптура первой половины XIX века
Скульптура первой половины XIX века Ointments, creams and gels
Ointments, creams and gels Бойове застосування КЗА 86Ж6. Призначення та структурна схема комплексу програм КЗА 86Ж6. (Тема 8.1)
Бойове застосування КЗА 86Ж6. Призначення та структурна схема комплексу програм КЗА 86Ж6. (Тема 8.1) Урок математики во 2 классе. Квадрат
Урок математики во 2 классе. Квадрат презентация к уроку Дружба
презентация к уроку Дружба Фотоальбом
Фотоальбом ВИЧ - инфекция
ВИЧ - инфекция Правила игры и правила судейства в баскетболе
Правила игры и правила судейства в баскетболе Геодезический контроль точности выполнения СМР
Геодезический контроль точности выполнения СМР Своя игра по изобразительному искусству
Своя игра по изобразительному искусству Лекция 4 ВЕНТИЛЯЦИЯ
Лекция 4 ВЕНТИЛЯЦИЯ Строительство в г. Новый Уренгой учебного полигона. Объект строительства
Строительство в г. Новый Уренгой учебного полигона. Объект строительства Карл Павлович Брюллов (1799-1852). Итальянская тематика
Карл Павлович Брюллов (1799-1852). Итальянская тематика Соль: вред или польза?
Соль: вред или польза? Что нужно знать о ГТО
Что нужно знать о ГТО Гиперактивный ребёнок
Гиперактивный ребёнок Научное исследование, учебное исследование, проектная деятельность
Научное исследование, учебное исследование, проектная деятельность Фестиваль пасхальных посиделок
Фестиваль пасхальных посиделок Российская компания Art Lumiere. Производство и реализация декоративных элементов из гипсокартона KNAUF
Российская компания Art Lumiere. Производство и реализация декоративных элементов из гипсокартона KNAUF Элементы квантовой биофизики
Элементы квантовой биофизики