- Методы построения мехатронных систем

Содержание
- 2. Основы конструирования мехатронных систем Основой методов конструирования мехатронных устройств является интеграция составляющих частей, которая определяется на
- 4. В целом проектирование мехатронных систем является сложной многофакторной проблемой выбора и оптимизации принимаемых технических и технологических,
- 5. Методологической основой для разработки мехатронных систем служат методы параллельного проектирования. При традиционном проектировании разработка механической, электронной,
- 6. Задачами системной интеграции занимается разработчик системы управления. Его возможности ограничены, так как основные конструкторские решения принимаются
- 7. Методология параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех устройств мехатронной системы (рис. 4.4).
- 8. Одна из известных процедур проектирования интегрированных мехатронных машин представлена на рис. 4.5. Эта процедура предусматривает четыре
- 10. Построение функциональной, структурной и конструктивной моделей позволяет применять в мехатронике методы и средства автоматизированного анализа, проектирования
- 11. Все проектные этапы имеют циклический характер, что отмечено круговыми стрелками на рис. 4.5. Например, на втором
- 12. При проектировании интегрированных мехатронных модулей могут использовать три метода интеграции. Методы интеграции можно классифицировать по характеру
- 13. Метод исключения промежуточных преобразователей и интерфейсов Структурные решения для мехатронных систем выявляются с помощью методики функционально-структурного
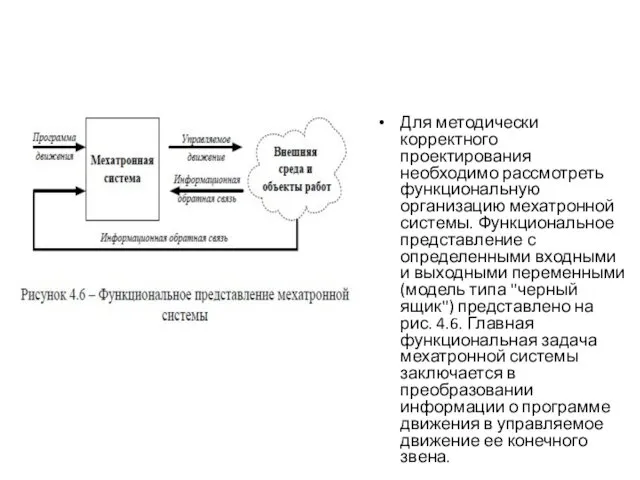
- 14. Для методически корректного проектирования необходимо рассмотреть функциональную организацию мехатронной системы. Функциональное представление с определенными входными и
- 15. Выделенная основная функция не обязательно является единственной для мехатронных систем. Некоторые дополнительные функции, такие как: реконфигурация
- 16. Функциональное представление мехатронного модуля в форме "черного ящика" (см. рис. 4.6) содержит два информационных входа (программа
- 17. Физическая реализация мехатронного информационно-механического преобразования осуществляется путем использования электрических источников энергии. Соответственно функциональная модель для современных
- 18. Электрическая энергия является только промежуточной энергетической формой между входной информацией и выходным механическим движением. Выбор физической
- 19. Структурная модель мехатронного модуля отражает состав его элементов и связи между ними. Структурные модели можно графически
- 20. В представленной структурной схеме выделяют управляющую и электромеханическую подсистемы. Структурная модель электропривода (см. рис. 4.8) включает
- 21. • устройство обратной связи (дает информацию о значениях электрических напряжений и токов в силовом преобразователе); •
- 22. Интеллектуальные интерфейсы расположены на входах и вы-ходах устройства компьютерного управления мехатронного модуля и предназначены для его
- 23. Построение мехатронных модулей с так называемым "бессенсорным" управлением означает исключение датчиков обратной связи вместе с соответствующими
- 24. Метод объединения элементов мехатронного модуля Рассматриваемый метод интеграции заключается в аппаратно-конструктивном объединении выбранных элементов и интерфейсов
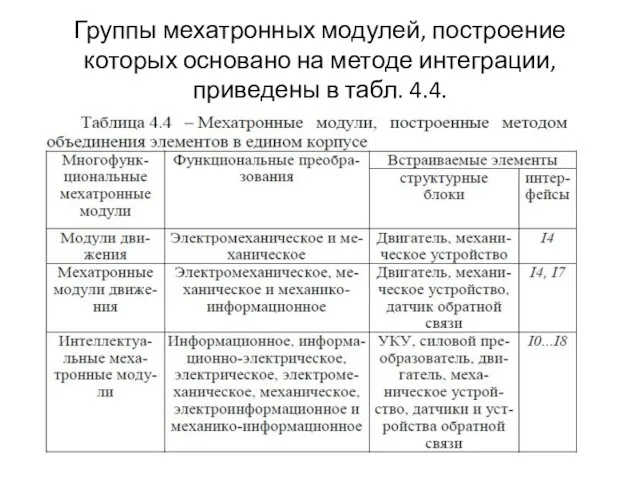
- 25. Группы мехатронных модулей, построение которых основано на методе интеграции, приведены в табл. 4.4.
- 26. Мехатронные модули движения являются многофункциональными изделиями, которые выполняют электромеханическое, механическое и механико-информационное преобразования (табл. 4.4). В
- 27. Главной особенностью современного этапа развития мехатроники является создание принципиально нового поколения модулей - интеллектуальных мехатронных модулей.
- 28. В общем случае интеллектуальный мехатронный модуль со-стоит из следующих основных элементов: • электро- (или, например, гидро-)
- 29. Основными преимуществами применения интеллектуальных мехатронных модулей являются: • способность выполнять сложные движения самостоятельно, без обращения к
- 30. • использование современных методов управления (программных, адаптивных, интеллектуальных, оптимальных) непосредственно на исполнительном уровне для повышения качества
- 31. Встраивание интеллектуальных устройств непосредственно в мехатронный модуль порождает и ряд ограничений. К ним следует отнести сложность
- 32. Метод переноса функциональной нагрузки на интеллектуальные устройства На этапе проектирования осуществляется распределение функций между структурными элементами
- 33. Мехатронный подход предполагает не дополнение, а замещение функций, традиционно выполняемых механическими элементами системы, электронными и компьютерными
- 35. Скачать презентацию
Основы конструирования мехатронных систем
Основой методов конструирования мехатронных устройств является интеграция составляющих
Основы конструирования мехатронных систем
Основой методов конструирования мехатронных устройств является интеграция составляющих

В целом проектирование мехатронных систем является сложной многофакторной проблемой выбора и
В целом проектирование мехатронных систем является сложной многофакторной проблемой выбора и
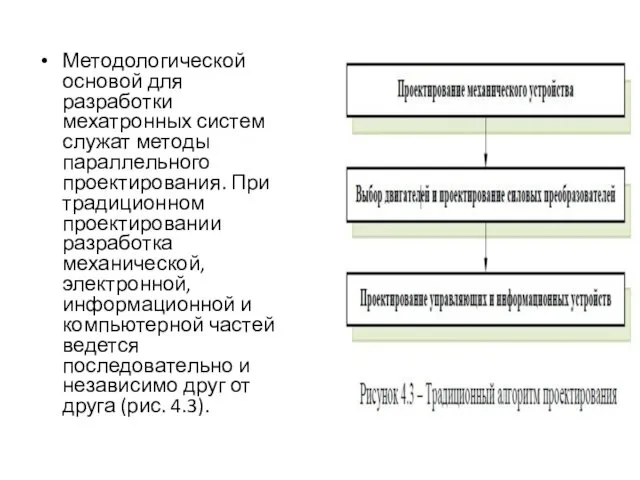
Методологической основой для разработки мехатронных систем служат методы параллельного проектирования. При
Методологической основой для разработки мехатронных систем служат методы параллельного проектирования. При
Задачами системной интеграции занимается разработчик системы управления. Его возможности ограничены, так
Задачами системной интеграции занимается разработчик системы управления. Его возможности ограничены, так

Методология параллельного проектирования заключается в
одновременном и взаимосвязанном синтезе всех устройств мехатронной
Методология параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех устройств мехатронной
Одна из известных процедур проектирования интегрированных мехатронных машин представлена на рис.
Одна из известных процедур проектирования интегрированных мехатронных машин представлена на рис.

Построение функциональной, структурной и конструктивной моделей позволяет применять в мехатронике методы
Построение функциональной, структурной и конструктивной моделей позволяет применять в мехатронике методы
Все проектные этапы имеют циклический характер, что отмечено круговыми стрелками на
Все проектные этапы имеют циклический характер, что отмечено круговыми стрелками на
При проектировании интегрированных мехатронных модулей могут использовать три метода интеграции. Методы
При проектировании интегрированных мехатронных модулей могут использовать три метода интеграции. Методы
Метод исключения промежуточных преобразователей и интерфейсов
Структурные решения для мехатронных систем выявляются
Метод исключения промежуточных преобразователей и интерфейсов
Структурные решения для мехатронных систем выявляются
Для методически корректного проектирования необходимо рассмотреть функциональную организацию мехатронной системы. Функциональное
Для методически корректного проектирования необходимо рассмотреть функциональную организацию мехатронной системы. Функциональное
Выделенная основная функция не обязательно является единственной для мехатронных систем. Некоторые
Выделенная основная функция не обязательно является единственной для мехатронных систем. Некоторые
Функциональное представление мехатронного модуля в форме "черного ящика" (см. рис. 4.6)
Функциональное представление мехатронного модуля в форме "черного ящика" (см. рис. 4.6)
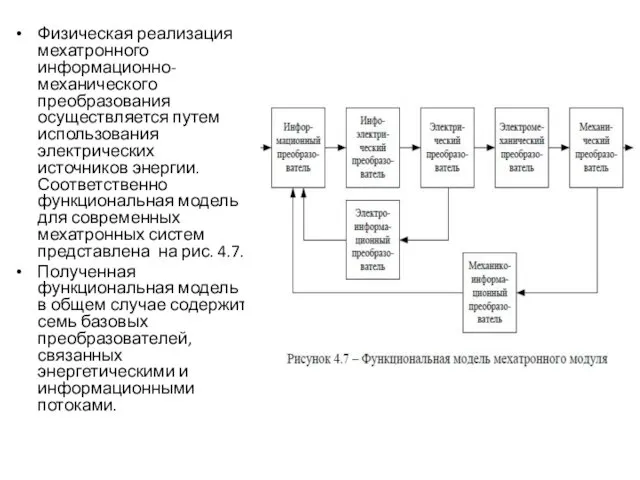
Физическая реализация мехатронного информационно-механического преобразования осуществляется путем использования электрических источников энергии.
Физическая реализация мехатронного информационно-механического преобразования осуществляется путем использования электрических источников энергии.
Электрическая энергия является только промежуточной энергетической формой между входной информацией и
Электрическая энергия является только промежуточной энергетической формой между входной информацией и
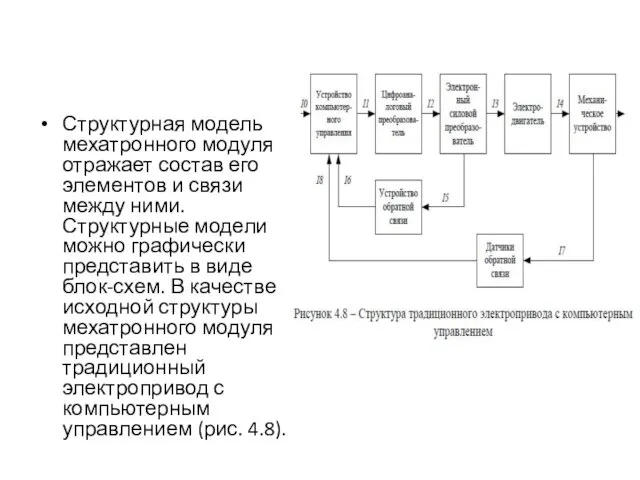
Структурная модель мехатронного модуля отражает состав его элементов и связи между
Структурная модель мехатронного модуля отражает состав его элементов и связи между
В представленной структурной схеме выделяют управляющую и электромеханическую подсистемы. Структурная модель
В представленной структурной схеме выделяют управляющую и электромеханическую подсистемы. Структурная модель
• устройство обратной связи (дает информацию о значениях электрических напряжений и
• устройство обратной связи (дает информацию о значениях электрических напряжений и
Интеллектуальные интерфейсы расположены на входах и вы-ходах устройства компьютерного управления мехатронного
Интеллектуальные интерфейсы расположены на входах и вы-ходах устройства компьютерного управления мехатронного
Построение мехатронных модулей с так называемым "бессенсорным" управлением означает исключение датчиков
Построение мехатронных модулей с так называемым "бессенсорным" управлением означает исключение датчиков
Метод объединения элементов мехатронного модуля
Рассматриваемый метод интеграции заключается в аппаратно-конструктивном объединении
Метод объединения элементов мехатронного модуля
Рассматриваемый метод интеграции заключается в аппаратно-конструктивном объединении
Группы мехатронных модулей, построение которых основано на методе интеграции, приведены в
Группы мехатронных модулей, построение которых основано на методе интеграции, приведены в
Мехатронные модули движения являются многофункциональными изделиями, которые выполняют электромеханическое, механическое и
Мехатронные модули движения являются многофункциональными изделиями, которые выполняют электромеханическое, механическое и
Главной особенностью современного этапа развития мехатроники является создание принципиально нового поколения
Главной особенностью современного этапа развития мехатроники является создание принципиально нового поколения
В общем случае интеллектуальный мехатронный модуль со-стоит из следующих основных элементов:
В общем случае интеллектуальный мехатронный модуль со-стоит из следующих основных элементов:
Основными преимуществами применения интеллектуальных мехатронных модулей являются:
• способность выполнять сложные
Основными преимуществами применения интеллектуальных мехатронных модулей являются:
• способность выполнять сложные
• использование современных методов управления (программных, адаптивных, интеллектуальных, оптимальных) непосредственно на
• использование современных методов управления (программных, адаптивных, интеллектуальных, оптимальных) непосредственно на
Встраивание интеллектуальных устройств непосредственно в мехатронный модуль порождает и ряд ограничений.
Встраивание интеллектуальных устройств непосредственно в мехатронный модуль порождает и ряд ограничений.
Метод переноса функциональной нагрузки на интеллектуальные устройства
На этапе проектирования осуществляется распределение
Метод переноса функциональной нагрузки на интеллектуальные устройства
На этапе проектирования осуществляется распределение
Мехатронный подход предполагает не дополнение, а замещение функций, традиционно выполняемых механическими
Мехатронный подход предполагает не дополнение, а замещение функций, традиционно выполняемых механическими
 20230930_organicheskiy_mir_antarktidy
20230930_organicheskiy_mir_antarktidy Практика. Организация видов работ при эксплуатации и реконструкции строительных объектов
Практика. Организация видов работ при эксплуатации и реконструкции строительных объектов Школа Пифагора
Школа Пифагора Познавательное развитие детей дошкольного возраста
Познавательное развитие детей дошкольного возраста Биологическое действие высокочастотных электромагнитных волн на здоровье человека и защита от них
Биологическое действие высокочастотных электромагнитных волн на здоровье человека и защита от них Презентация к уроку технология. 4 класс
Презентация к уроку технология. 4 класс От совместной деятельности с родителями к совместному управлению
От совместной деятельности с родителями к совместному управлению О холестерине без заблуждений
О холестерине без заблуждений Film program coming up
Film program coming up Облагораживание ТН и ПБ с использованием технологии флюидкокинг
Облагораживание ТН и ПБ с использованием технологии флюидкокинг Назначение, боевые характеристики и устройство ручных осколочных и противотанковых гранат
Назначение, боевые характеристики и устройство ручных осколочных и противотанковых гранат Наши отцы и деды - защитники Родины
Наши отцы и деды - защитники Родины Алкоголизм- это страшная беда современного общества
Алкоголизм- это страшная беда современного общества Презентация проекта Предшкола
Презентация проекта Предшкола игра Ассоциации с зимой
игра Ассоциации с зимой Город Владимир
Город Владимир Тематическая викторина. Растениеводство в фольклоре. Загадки.
Тематическая викторина. Растениеводство в фольклоре. Загадки. Играем и изучаем правила дорожного движения
Играем и изучаем правила дорожного движения Эстетикалық стоматология үшін оптикалық жүйенің маңызы
Эстетикалық стоматология үшін оптикалық жүйенің маңызы Презентация к тематическому занятию, приуроченного к столетнему юбилею со дня рождения Георгия Свиридова для детей подготовительной к школе группы
Презентация к тематическому занятию, приуроченного к столетнему юбилею со дня рождения Георгия Свиридова для детей подготовительной к школе группы Классификация сталей. Термическая обработка сталей
Классификация сталей. Термическая обработка сталей Lukoil company
Lukoil company Технологія друкарських процесів
Технологія друкарських процесів Научные открытия России
Научные открытия России Установление советской власти в Казахстане
Установление советской власти в Казахстане Острая кишечная непроходимость
Острая кишечная непроходимость Постсоветский регион.
Постсоветский регион. Формирование и анализ показателей отчета о финансовых результатах коммерческой организации
Формирование и анализ показателей отчета о финансовых результатах коммерческой организации