- Методы сканирующей зондовой микроскопии

Содержание
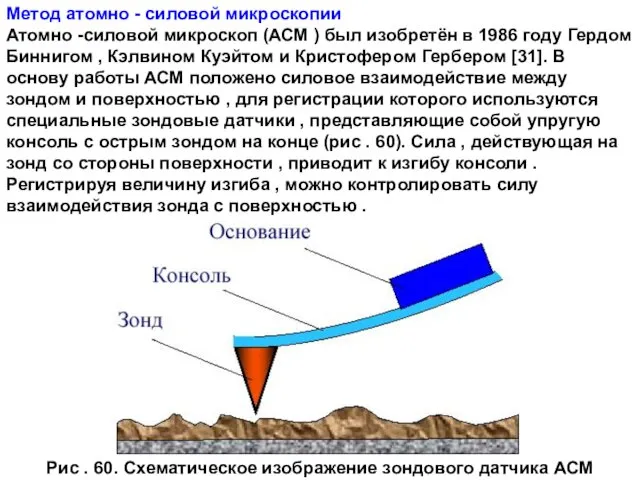
- 2. Метод атомно - силовой микроскопии Атомно -силовой микроскоп (АСМ ) был изобретён в 1986 году Гердом
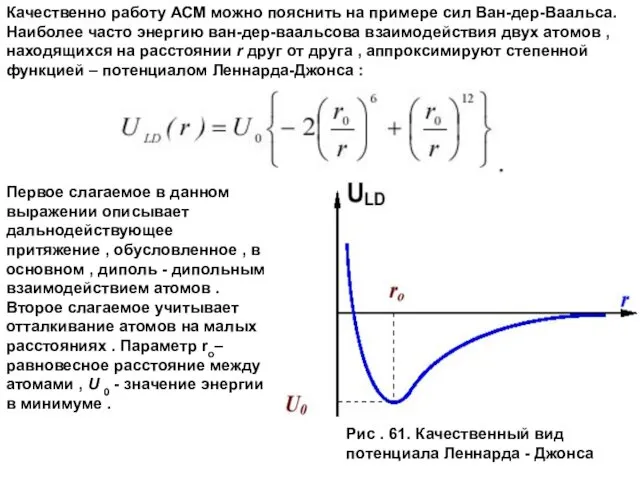
- 3. Первое слагаемое в данном выражении описывает дальнодействующее притяжение , обусловленное , в основном , диполь -
- 4. Потенциал Леннарда -Джонса позволяет оценить силу взаимодействия зонда с образцом [33]. Общую энергию системы можно получить
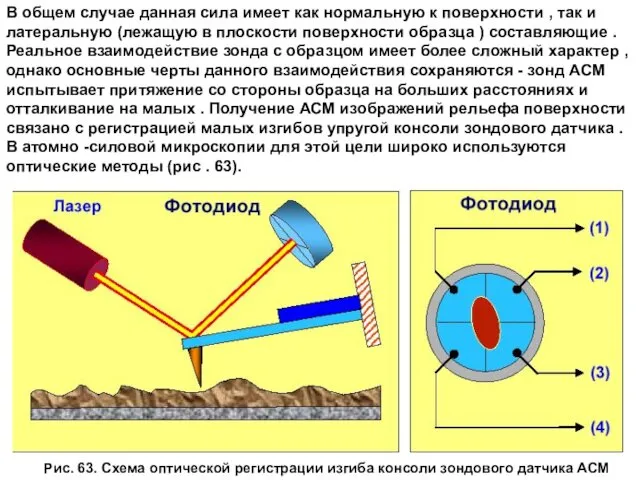
- 5. Рис. 63. Схема оптической регистрации изгиба консоли зондового датчика АСМ В общем случае данная сила имеет
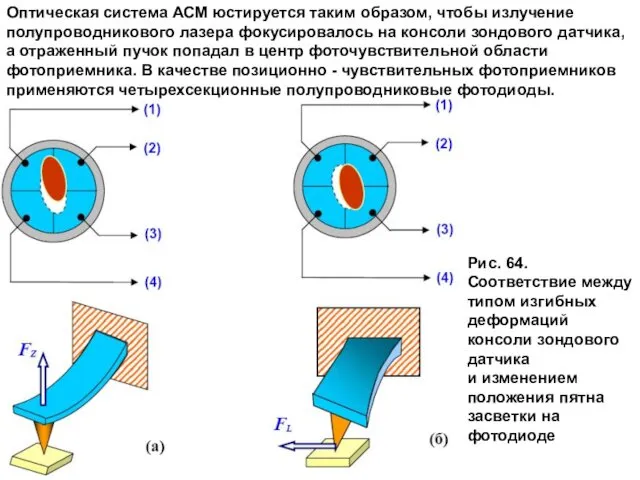
- 6. Оптическая система АСМ юстируется таким образом, чтобы излучение полупроводникового лазера фокусировалось на консоли зондового датчика, а
- 7. Основные регистрируемые оптической системой параметры - это деформации изгиба консоли под действием Z-компонент сил притяжения или
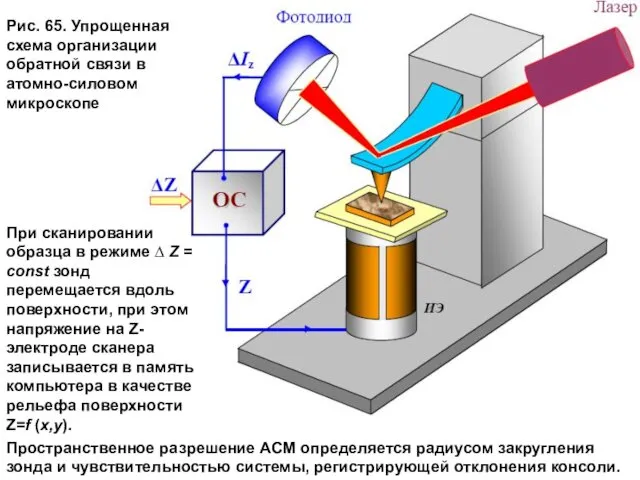
- 8. Рис. 65. Упрощенная схема организации обратной связи в атомно-силовом микроскопе При сканировании образца в режиме ∆
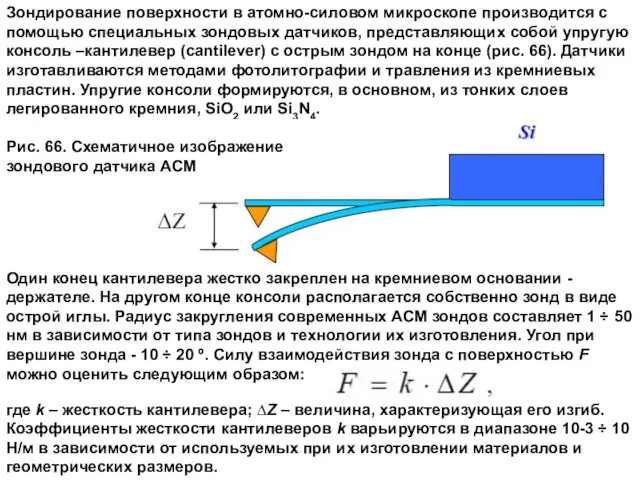
- 9. Один конец кантилевера жестко закреплен на кремниевом основании - держателе. На другом конце консоли располагается собственно
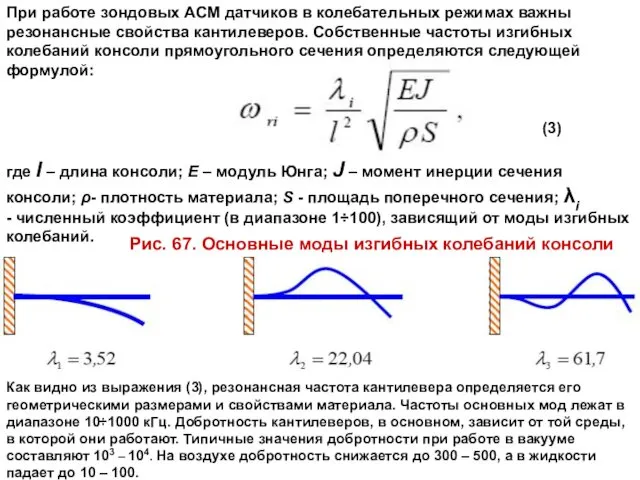
- 10. При работе зондовых АСМ датчиков в колебательных режимах важны резонансные свойства кантилеверов. Собственные частоты изгибных колебаний
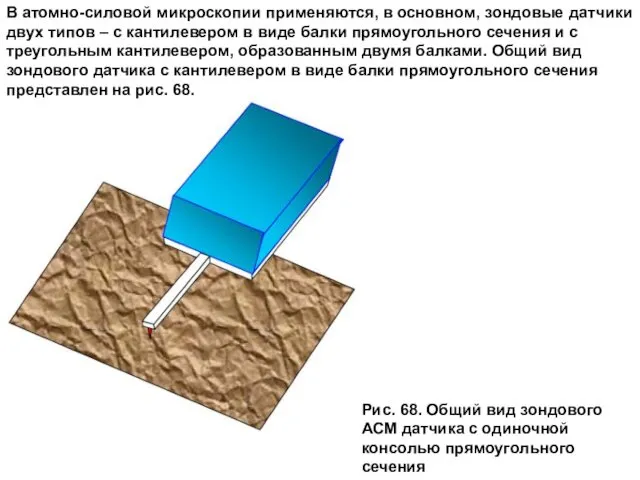
- 11. В атомно-силовой микроскопии применяются, в основном, зондовые датчики двух типов – с кантилевером в виде балки
- 12. На рис. 69. показаны электронно-микроскопические изображения выпускаемых серийно зондовых датчиков NSG11 с консолью прямоугольного сечения (компания
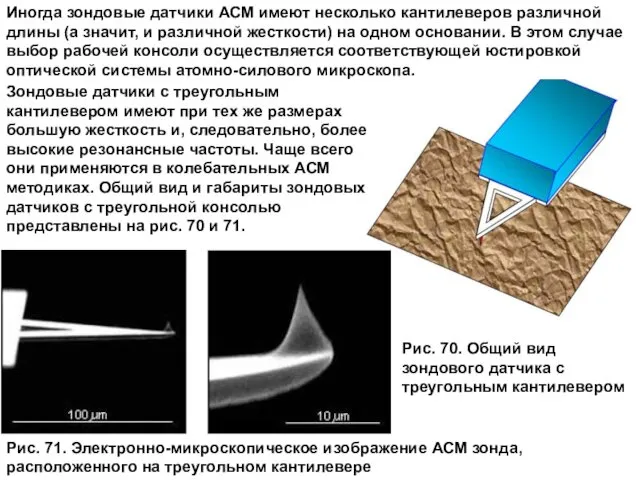
- 13. Иногда зондовые датчики АСМ имеют несколько кантилеверов различной длины (а значит, и различной жесткости) на одном
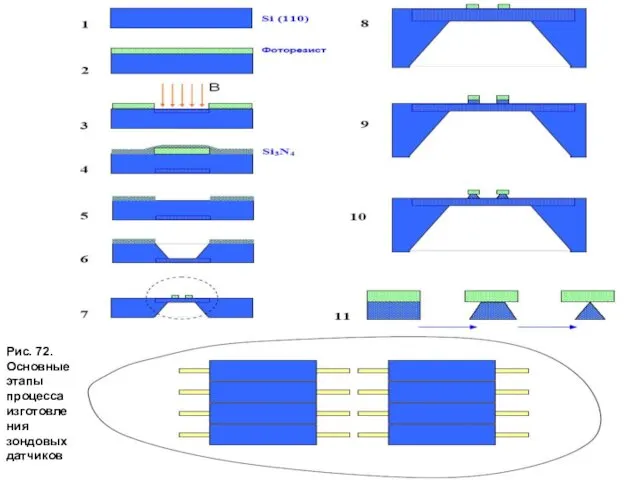
- 14. Изготовление зондовых датчиков для АСМ представляет собой достаточно сложный технологический процесс, включающий в себя операции фотолитографии,
- 15. Рис. 72. Основные этапы процесса изготовления зондовых датчиков
- 16. Контактная атомно-силовая микроскопия Условно методы получения информации о рельефе и свойствах поверхности с помощью АСМ можно
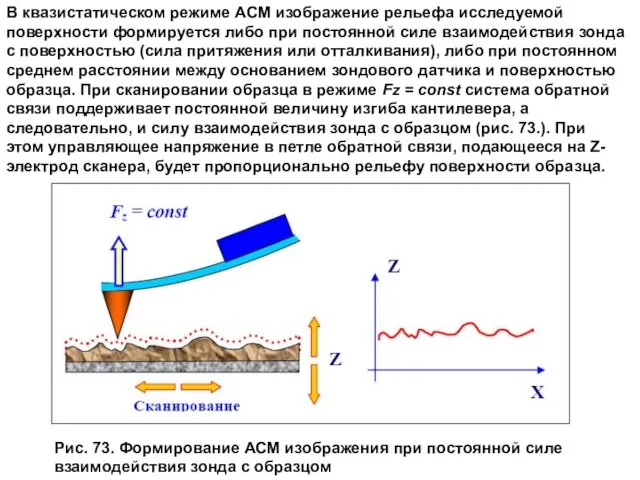
- 17. В квазистатическом режиме АСМ изображение рельефа исследуемой поверхности формируется либо при постоянной силе взаимодействия зонда с
- 18. При исследовании образцов с малыми (порядка единиц ангстрем) перепадами высот рельефа часто применяется режим сканирования при
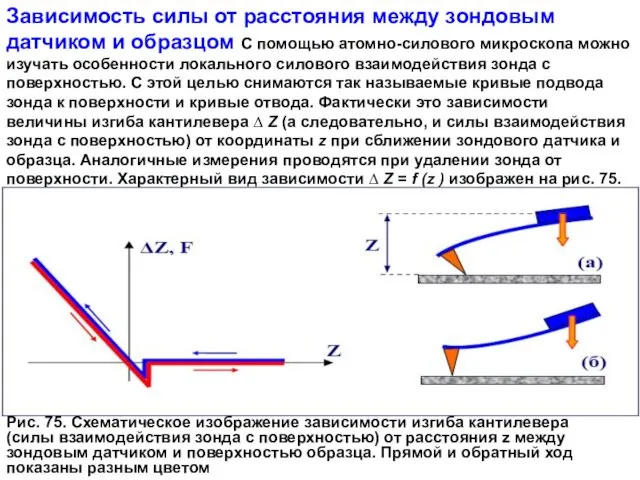
- 19. Рис. 75. Схематическое изображение зависимости изгиба кантилевера (силы взаимодействия зонда с поверхностью) от расстояния z между
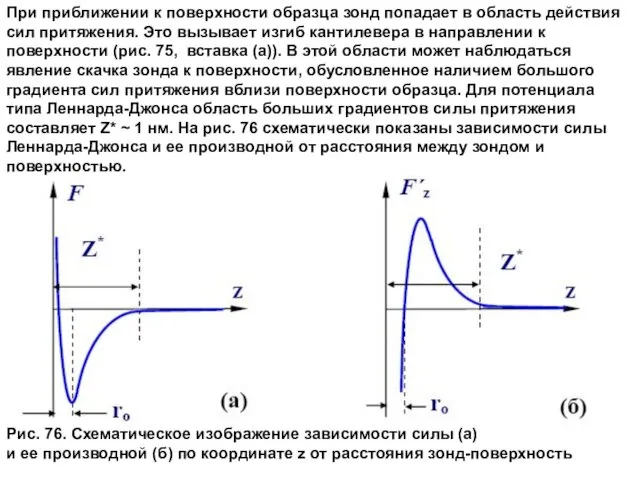
- 20. При приближении к поверхности образца зонд попадает в область действия сил притяжения. Это вызывает изгиб кантилевера
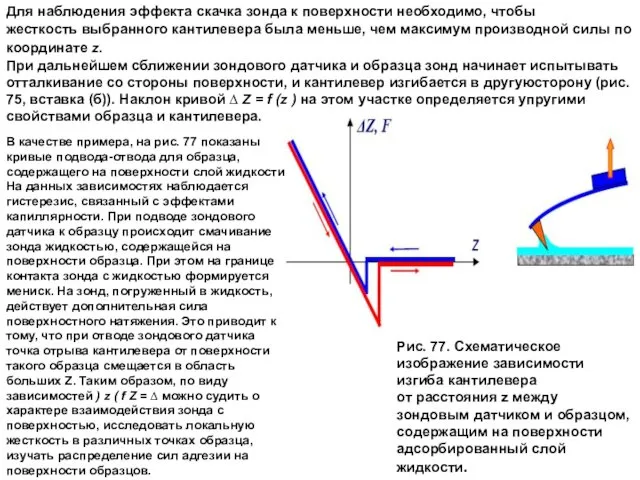
- 21. Для наблюдения эффекта скачка зонда к поверхности необходимо, чтобы жесткость выбранного кантилевера была меньше, чем максимум
- 22. Система управления АСМ при работе кантилевера в контактном режиме Рис. 78. Упрощенная схема системы управления атомно-силового
- 23. Система управления состоит из цифровой части, реализованной на базе персонального компьютера, и аналоговой части, выполняемой обычно
- 24. Сканирование образца осуществляется при подаче напряжений пилообразной формы на внешние электроды трубчатого сканера с помощью двухканальных
- 25. Колебательные методики АСМ Как указывалось выше, недостатком контактных АСМ методик является непосредственное механическое взаимодействие зонда с
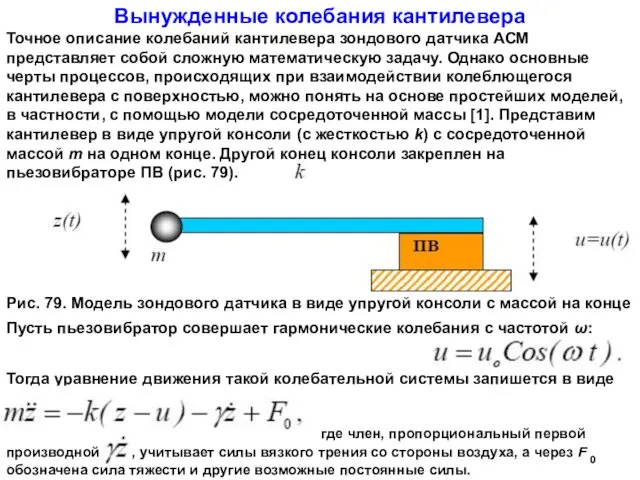
- 26. Вынужденные колебания кантилевера Точное описание колебаний кантилевера зондового датчика АСМ представляет собой сложную математическую задачу. Однако
- 27. Как известно, постоянная сила лишь смещает положение равновесия системы и не влияет на частоту, амплитуду и
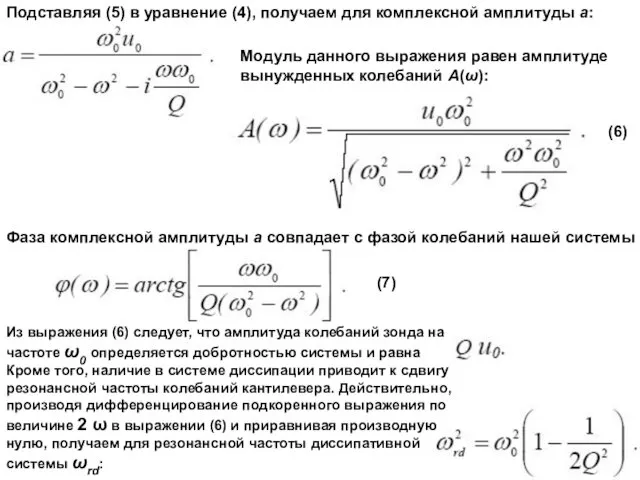
- 28. Подставляя (5) в уравнение (4), получаем для комплексной амплитуды а: Модуль данного выражения равен амплитуде вынужденных
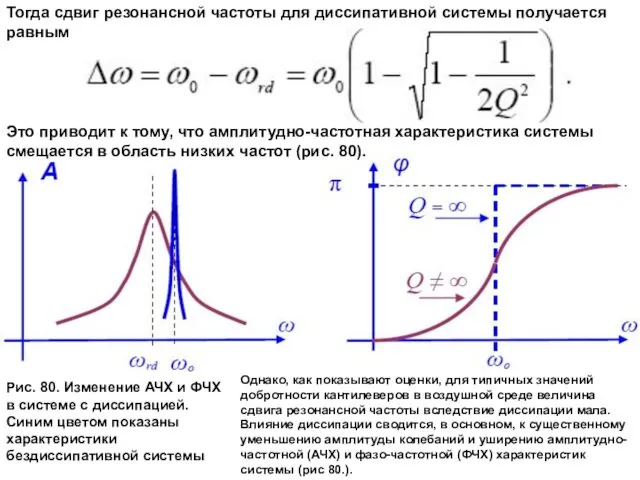
- 29. Тогда сдвиг резонансной частоты для диссипативной системы получается равным Это приводит к тому, что амплитудно-частотная характеристика
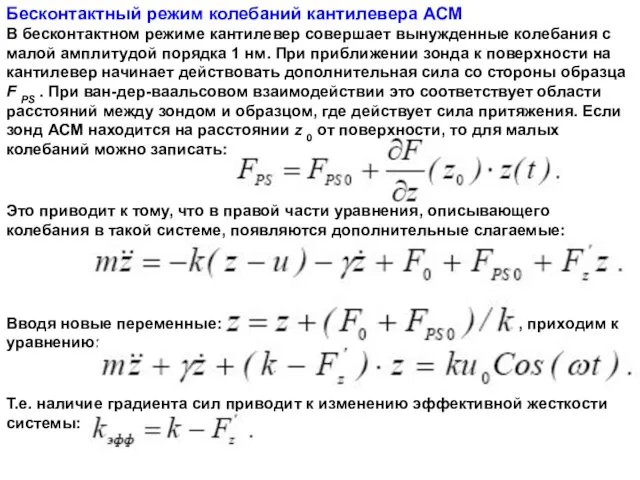
- 30. Бесконтактный режим колебаний кантилевера АСМ В бесконтактном режиме кантилевер совершает вынужденные колебания с малой амплитудой порядка
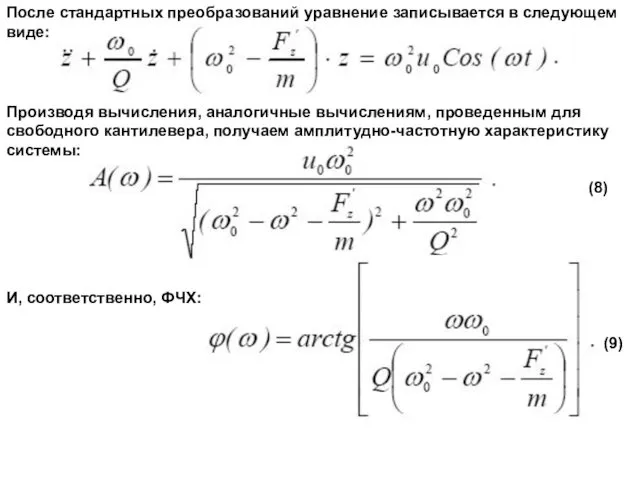
- 31. После стандартных преобразований уравнение записывается в следующем виде: Производя вычисления, аналогичные вычислениям, проведенным для свободного кантилевера,
- 32. Таким образом, наличие градиента силы взаимодействия зонда с поверхностью образца приводит к дополнительному сдвигу АЧХ и
- 33. Из выражения (9) также следует, что наличие градиента силы приводит к сдвигу ФЧХ, так что точка
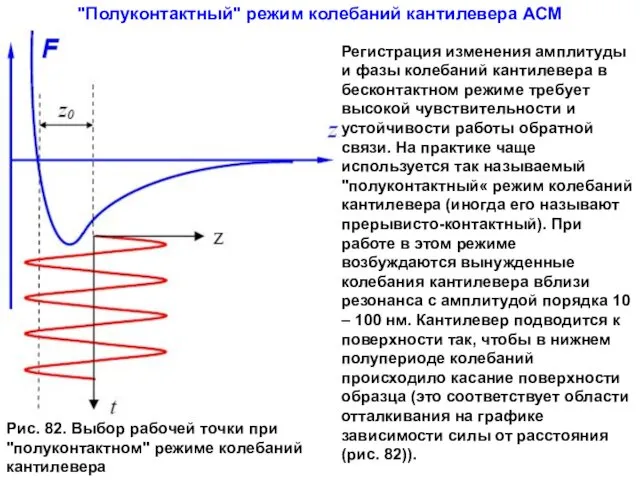
- 34. Рис. 82. Выбор рабочей точки при "полуконтактном" режиме колебаний кантилевера "Полуконтактный" режим колебаний кантилевера АСМ Регистрация
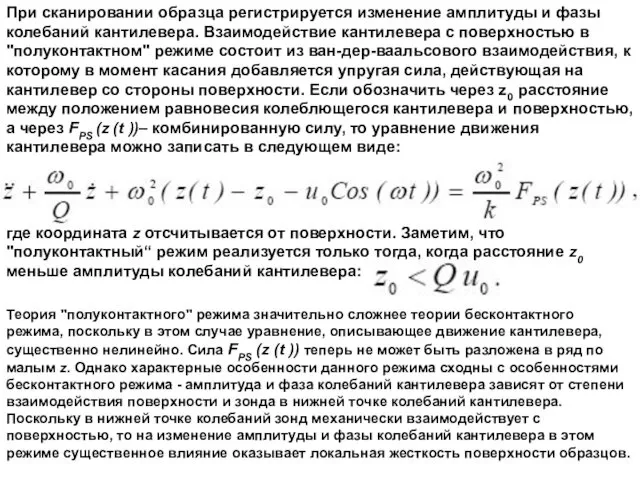
- 35. При сканировании образца регистрируется изменение амплитуды и фазы колебаний кантилевера. Взаимодействие кантилевера с поверхностью в "полуконтактном"
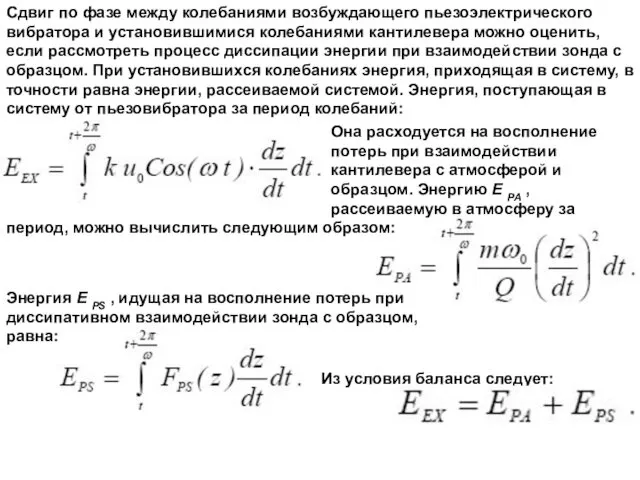
- 36. Сдвиг по фазе между колебаниями возбуждающего пьезоэлектрического вибратора и установившимися колебаниями кантилевера можно оценить, если рассмотреть
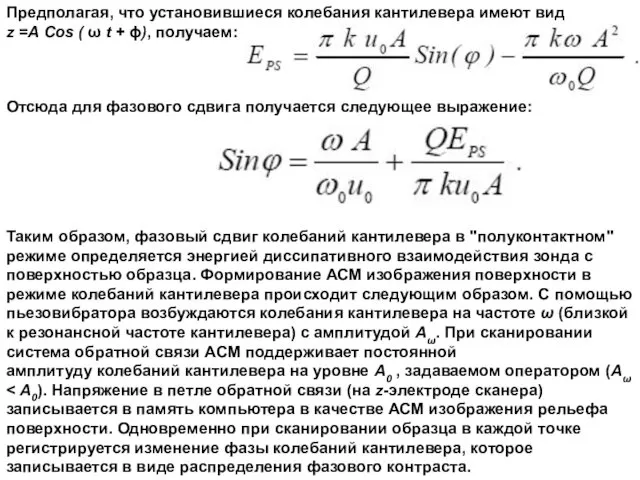
- 37. Предполагая, что установившиеся колебания кантилевера имеют вид z =A Cos ( ω t + ϕ), получаем:
- 39. Скачать презентацию
Метод атомно - силовой микроскопии
Атомно -силовой микроскоп (АСМ ) был изобретён в 1986
Метод атомно - силовой микроскопии
Атомно -силовой микроскоп (АСМ ) был изобретён в 1986
Первое слагаемое в данном выражении описывает дальнодействующее
притяжение , обусловленное , в основном ,
Первое слагаемое в данном выражении описывает дальнодействующее
притяжение , обусловленное , в основном ,
Потенциал Леннарда -Джонса позволяет оценить силу взаимодействия зонда с образцом [33]. Общую энергию
Потенциал Леннарда -Джонса позволяет оценить силу взаимодействия зонда с образцом [33]. Общую энергию
![Потенциал Леннарда -Джонса позволяет оценить силу взаимодействия зонда с образцом [33]. Общую энергию](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/34989/slide-3.jpg)
Рис. 63. Схема оптической регистрации изгиба консоли зондового датчика АСМ
В общем случае данная
Рис. 63. Схема оптической регистрации изгиба консоли зондового датчика АСМ
В общем случае данная
Оптическая система АСМ юстируется таким образом, чтобы излучение
полупроводникового лазера фокусировалось на консоли зондового
Оптическая система АСМ юстируется таким образом, чтобы излучение
полупроводникового лазера фокусировалось на консоли зондового
Основные регистрируемые оптической системой параметры - это деформации изгиба консоли под действием Z-компонент
Основные регистрируемые оптической системой параметры - это деформации изгиба консоли под действием Z-компонент
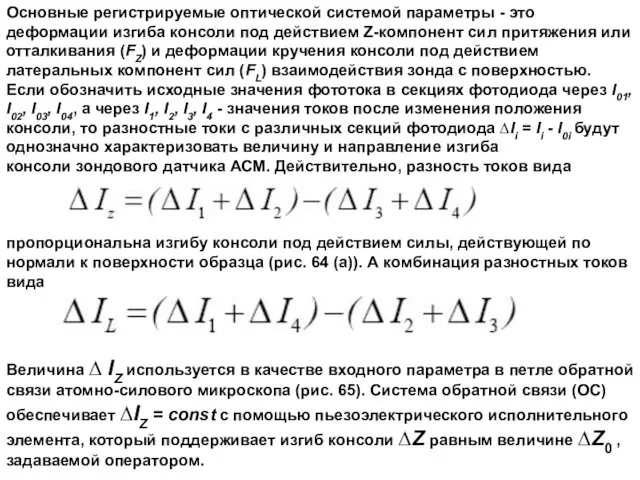
Рис. 65. Упрощенная схема организации обратной связи в атомно-силовом микроскопе
При сканировании образца в
Рис. 65. Упрощенная схема организации обратной связи в атомно-силовом микроскопе
При сканировании образца в
Один конец кантилевера жестко закреплен на кремниевом основании -
держателе. На другом конце консоли
Один конец кантилевера жестко закреплен на кремниевом основании -
держателе. На другом конце консоли
При работе зондовых АСМ датчиков в колебательных режимах важны
резонансные свойства кантилеверов. Собственные частоты
При работе зондовых АСМ датчиков в колебательных режимах важны
резонансные свойства кантилеверов. Собственные частоты
В атомно-силовой микроскопии применяются, в основном, зондовые датчики двух типов – с кантилевером
В атомно-силовой микроскопии применяются, в основном, зондовые датчики двух типов – с кантилевером
На рис. 69. показаны электронно-микроскопические изображения выпускаемых серийно зондовых датчиков NSG11 с консолью
На рис. 69. показаны электронно-микроскопические изображения выпускаемых серийно зондовых датчиков NSG11 с консолью
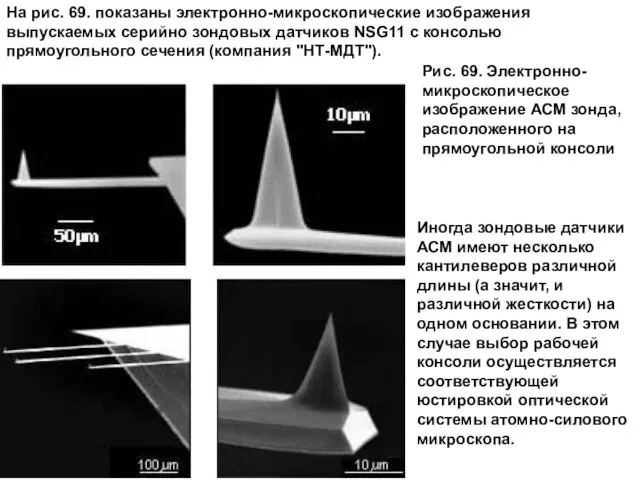
Иногда зондовые датчики АСМ имеют несколько кантилеверов различной
длины (а значит, и различной жесткости)
Иногда зондовые датчики АСМ имеют несколько кантилеверов различной
длины (а значит, и различной жесткости)
Изготовление зондовых датчиков для АСМ представляет собой достаточно
сложный технологический процесс, включающий в себя
Изготовление зондовых датчиков для АСМ представляет собой достаточно
сложный технологический процесс, включающий в себя
Рис. 72. Основные этапы процесса изготовления зондовых датчиков
Рис. 72. Основные этапы процесса изготовления зондовых датчиков
Контактная атомно-силовая микроскопия
Условно методы получения информации о рельефе и свойствах поверхности с помощью
Контактная атомно-силовая микроскопия
Условно методы получения информации о рельефе и свойствах поверхности с помощью
В квазистатическом режиме АСМ изображение рельефа исследуемой поверхности формируется либо при постоянной силе
В квазистатическом режиме АСМ изображение рельефа исследуемой поверхности формируется либо при постоянной силе
При исследовании образцов с малыми (порядка единиц ангстрем) перепадами высот рельефа часто применяется
При исследовании образцов с малыми (порядка единиц ангстрем) перепадами высот рельефа часто применяется
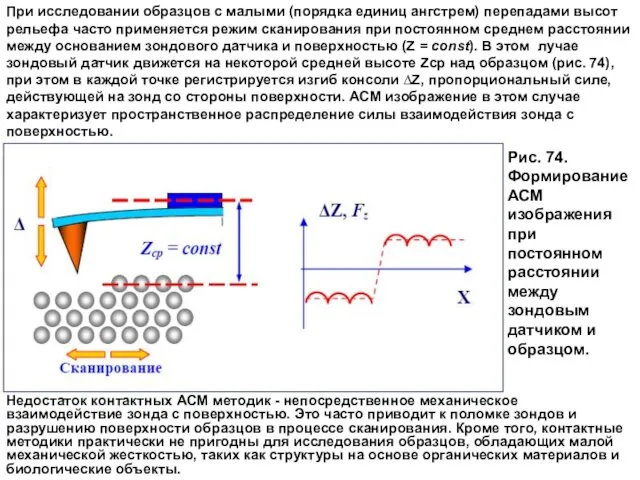
Рис. 75. Схематическое изображение зависимости изгиба кантилевера
(силы взаимодействия зонда с поверхностью) от расстояния
Рис. 75. Схематическое изображение зависимости изгиба кантилевера
(силы взаимодействия зонда с поверхностью) от расстояния
При приближении к поверхности образца зонд попадает в область действия сил притяжения. Это
При приближении к поверхности образца зонд попадает в область действия сил притяжения. Это
Для наблюдения эффекта скачка зонда к поверхности необходимо, чтобы
жесткость выбранного кантилевера была меньше,
Для наблюдения эффекта скачка зонда к поверхности необходимо, чтобы
жесткость выбранного кантилевера была меньше,
Система управления АСМ при работе кантилевера в контактном режиме
Рис. 78. Упрощенная схема системы
Система управления АСМ при работе кантилевера в контактном режиме
Рис. 78. Упрощенная схема системы

Система управления состоит из цифровой части, реализованной на базе персонального компьютера, и аналоговой
Система управления состоит из цифровой части, реализованной на базе персонального компьютера, и аналоговой
Сканирование образца осуществляется при подаче напряжений пилообразной формы на внешние электроды трубчатого сканера
Сканирование образца осуществляется при подаче напряжений пилообразной формы на внешние электроды трубчатого сканера
Колебательные методики АСМ
Как указывалось выше, недостатком контактных АСМ методик является
непосредственное механическое взаимодействие зонда
Колебательные методики АСМ
Как указывалось выше, недостатком контактных АСМ методик является
непосредственное механическое взаимодействие зонда
Вынужденные колебания кантилевера
Точное описание колебаний кантилевера зондового датчика АСМ представляет собой сложную математическую
Вынужденные колебания кантилевера
Точное описание колебаний кантилевера зондового датчика АСМ представляет собой сложную математическую
Как известно, постоянная сила лишь смещает положение равновесия системы и не влияет на
Как известно, постоянная сила лишь смещает положение равновесия системы и не влияет на
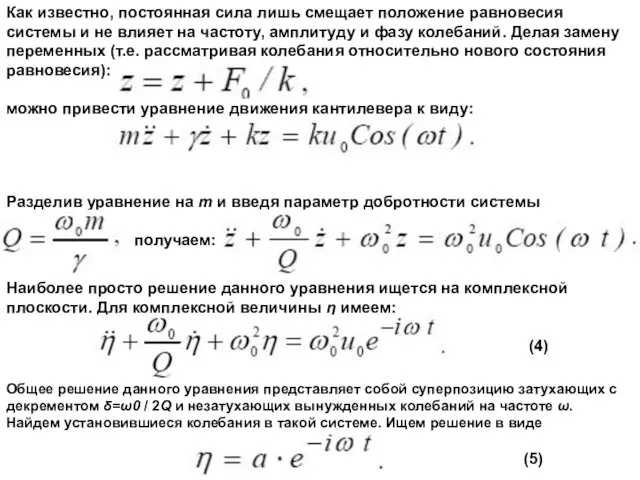
Подставляя (5) в уравнение (4), получаем для комплексной амплитуды а:
Модуль данного выражения равен
Подставляя (5) в уравнение (4), получаем для комплексной амплитуды а:
Модуль данного выражения равен
Тогда сдвиг резонансной частоты для диссипативной системы получается
равным
Это приводит к тому, что
Тогда сдвиг резонансной частоты для диссипативной системы получается
равным
Это приводит к тому, что
Бесконтактный режим колебаний кантилевера АСМ
В бесконтактном режиме кантилевер совершает вынужденные колебания с
малой амплитудой
Бесконтактный режим колебаний кантилевера АСМ
В бесконтактном режиме кантилевер совершает вынужденные колебания с
малой амплитудой
После стандартных преобразований уравнение записывается в следующем виде:
Производя вычисления, аналогичные вычислениям, проведенным для
свободного
После стандартных преобразований уравнение записывается в следующем виде:
Производя вычисления, аналогичные вычислениям, проведенным для
свободного
Таким образом, наличие градиента силы взаимодействия зонда с поверхностью образца приводит к дополнительному
Таким образом, наличие градиента силы взаимодействия зонда с поверхностью образца приводит к дополнительному
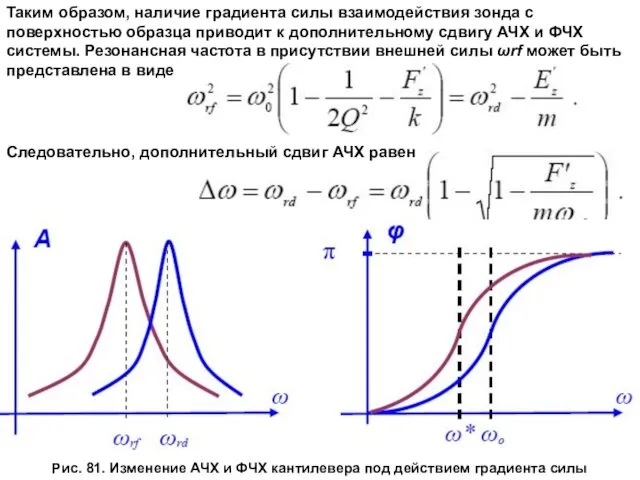
Из выражения (9) также следует, что наличие градиента силы приводит к сдвигу ФЧХ,
Из выражения (9) также следует, что наличие градиента силы приводит к сдвигу ФЧХ,
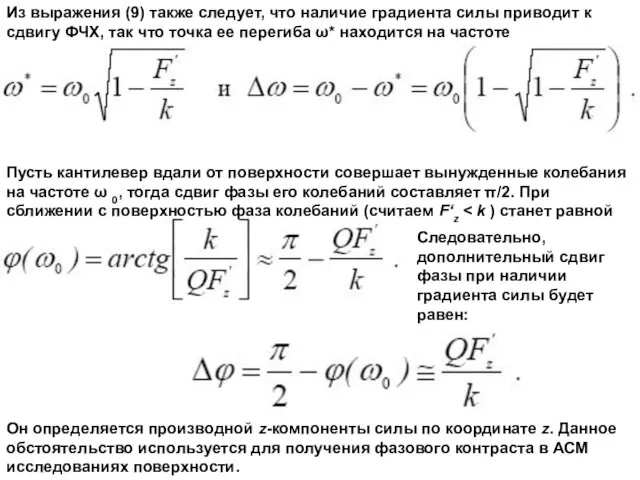
Рис. 82. Выбор рабочей точки при "полуконтактном" режиме колебаний кантилевера
"Полуконтактный" режим колебаний кантилевера
Рис. 82. Выбор рабочей точки при "полуконтактном" режиме колебаний кантилевера
"Полуконтактный" режим колебаний кантилевера
При сканировании образца регистрируется изменение амплитуды и фазы
колебаний кантилевера. Взаимодействие кантилевера с поверхностью
При сканировании образца регистрируется изменение амплитуды и фазы
колебаний кантилевера. Взаимодействие кантилевера с поверхностью
Сдвиг по фазе между колебаниями возбуждающего пьезоэлектрического
вибратора и установившимися колебаниями кантилевера можно оценить,
Сдвиг по фазе между колебаниями возбуждающего пьезоэлектрического
вибратора и установившимися колебаниями кантилевера можно оценить,
Предполагая, что установившиеся колебания кантилевера имеют вид
z =A Cos ( ω t +
Предполагая, что установившиеся колебания кантилевера имеют вид
z =A Cos ( ω t +
 Визитная карточка педагога дополнительного образования (хореографа) Даниловой Елены Валерьевны Диск
Визитная карточка педагога дополнительного образования (хореографа) Даниловой Елены Валерьевны Диск Мастер класс Пинетки
Мастер класс Пинетки Презентация Социальный партнер
Презентация Социальный партнер Метаболизм липидов. Липолиз. Окисление жирных кислот и глицерола
Метаболизм липидов. Липолиз. Окисление жирных кислот и глицерола Император Карл Великий (768 – 814 гг.)
Император Карл Великий (768 – 814 гг.) Правление Павла I. Общественно-экономические реформы в начале XIX века. Александр I и Николай I. (Тема 9)
Правление Павла I. Общественно-экономические реформы в начале XIX века. Александр I и Николай I. (Тема 9) Глагол to be
Глагол to be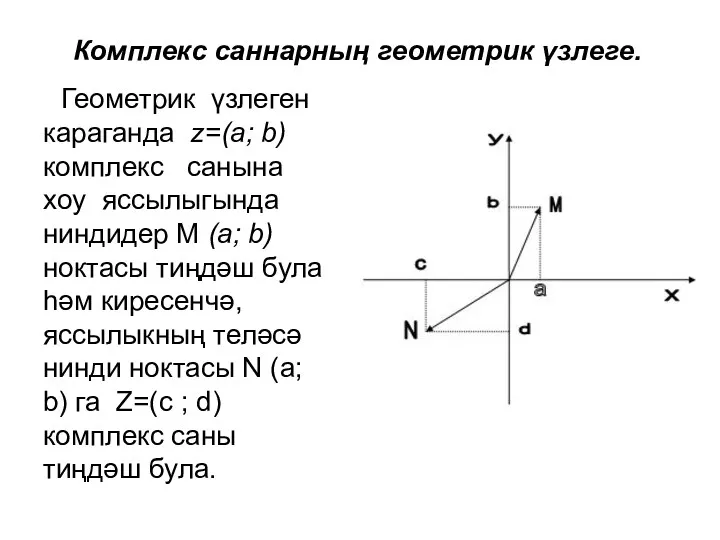 Комплекс саннар
Комплекс саннар Методы освоения подземных пространств
Методы освоения подземных пространств Место духовно-нравственного воспитания по ФГОС
Место духовно-нравственного воспитания по ФГОС Проведение динамометрирования
Проведение динамометрирования Подбери по образцу.
Подбери по образцу. Ет және сүйек пастасын өндіру жабдығын орнату,іске қосу және пайдалану
Ет және сүйек пастасын өндіру жабдығын орнату,іске қосу және пайдалану Анализ опасных технологических процессов в производстве мармелада
Анализ опасных технологических процессов в производстве мармелада Утренник Мы теперь не просто дети, мы теперь ученики
Утренник Мы теперь не просто дети, мы теперь ученики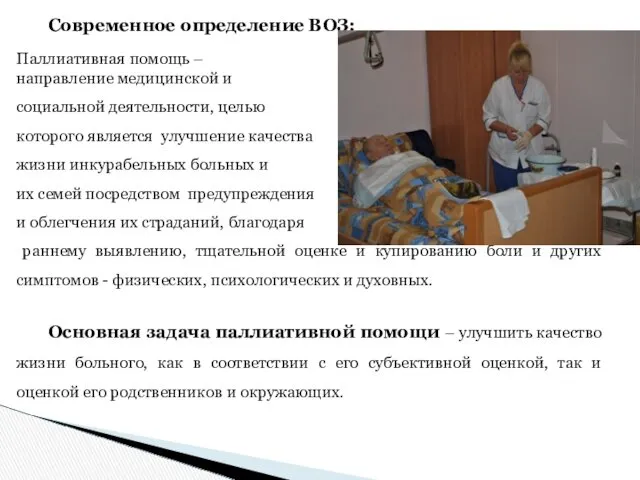 Паллиативная помощь
Паллиативная помощь Saving Energy at Home
Saving Energy at Home Крестики - нолики
Крестики - нолики She/from. He/from
She/from. He/from Анализаторы
Анализаторы Презентация Игра по сказкам А.С.Пушкина
Презентация Игра по сказкам А.С.Пушкина Исследовательская практика младших школьников
Исследовательская практика младших школьников Технология ремонта секционных радиаторов отопительного прибора
Технология ремонта секционных радиаторов отопительного прибора Особенности определения инструментальной составляющей погрешности измерений. Лекция 11
Особенности определения инструментальной составляющей погрешности измерений. Лекция 11 Методи та оцінка ризику при проведені комп’ютерного аудиту
Методи та оцінка ризику при проведені комп’ютерного аудиту Презентация по дисциплине: Документационное обеспечение управления
Презентация по дисциплине: Документационное обеспечение управления Тема 6. Геология. Минералы
Тема 6. Геология. Минералы Строительные работы и процессы
Строительные работы и процессы