- Моделирование и проектирование микросистемы сенсоров деформаций

Содержание
- 2. Цель и задачи работы Цель работы – поведенческая модель микросистемы сенсоров деформаций при повышенной температуре Задачи
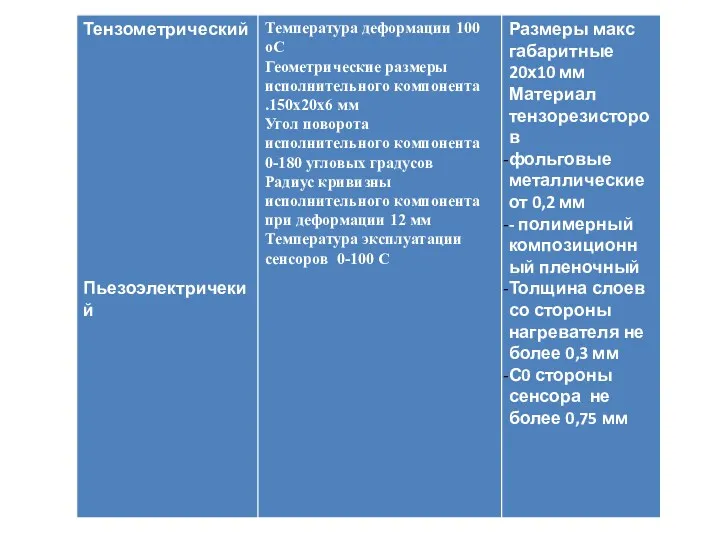
- 3. Исходные данные к моделированию и проектированию Температура деформации…………………………………………. ……100 оС Геометрические размеры исполнительного компонента …………...150х20х6 мм
- 4. Анализ и выбор принципа действия Исходное положение Деформированное положение
- 7. Верхняя послойная топология 2 1 3 4
- 8. Нижняя послойная топология 1.1 1.2 1.3
- 9. Послойная топология(совмещённо)
- 10. Наименование слоёв Исполнительный компонент (Ti-Ni) Диэлектрик (ПСФ) Тензорезистор (Ni-Cr) Терморезистор
- 12. Вопросы к понедельнику
- 14. Скачать презентацию
Цель и задачи работы
Цель работы – поведенческая модель микросистемы сенсоров деформаций
Цель и задачи работы
Цель работы – поведенческая модель микросистемы сенсоров деформаций
Исходные данные к моделированию и проектированию
Температура деформации…………………………………………. ……100 оС
Геометрические размеры
Исходные данные к моделированию и проектированию
Температура деформации…………………………………………. ……100 оС
Геометрические размеры
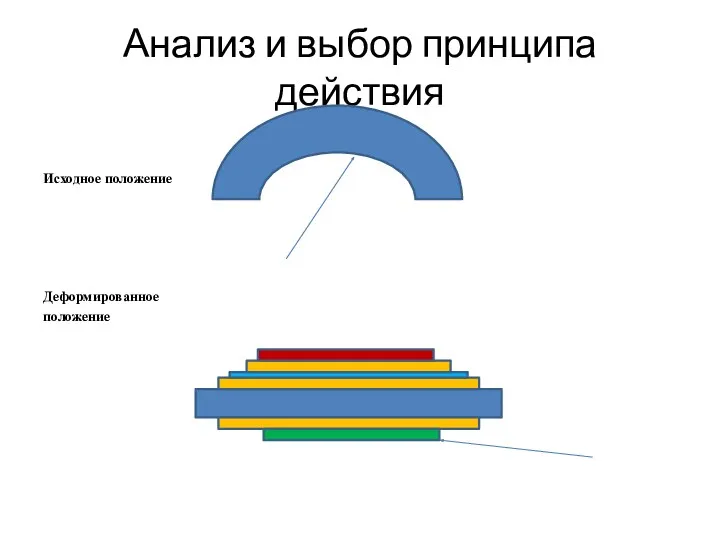
Анализ и выбор принципа действия
Исходное положение
Деформированное
положение
Анализ и выбор принципа действия
Исходное положение
Деформированное
положение
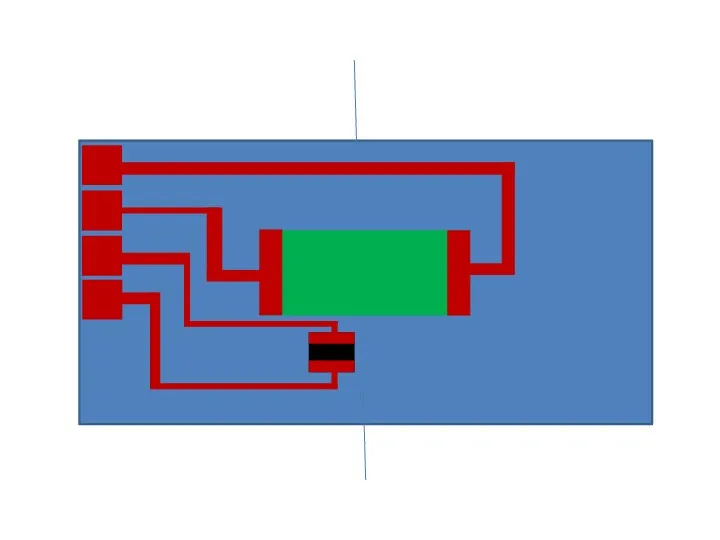
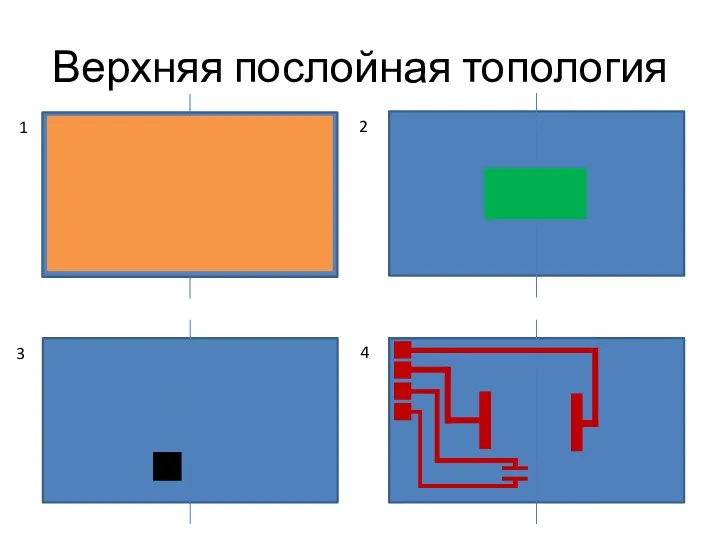
Верхняя послойная топология
2
1
3
4
Верхняя послойная топология
2
1
3
4
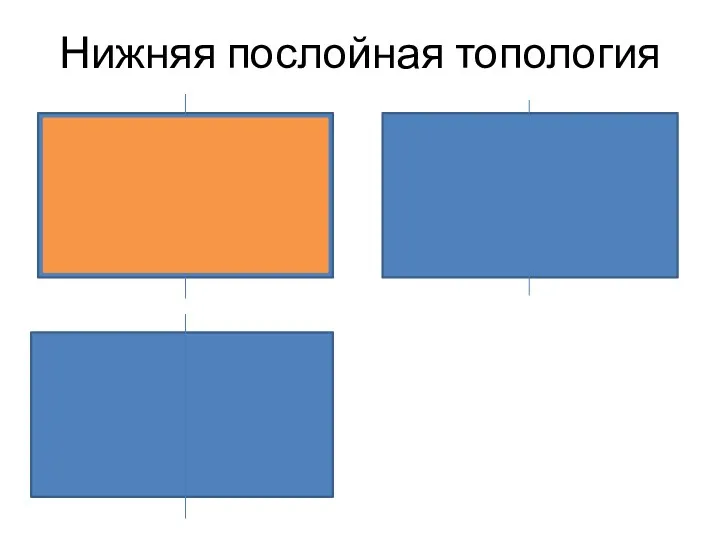
Нижняя послойная топология
1.1
1.2
1.3
Нижняя послойная топология
1.1
1.2
1.3

Послойная топология(совмещённо)
Послойная топология(совмещённо)
Наименование слоёв
Исполнительный компонент (Ti-Ni)
Диэлектрик (ПСФ)
Тензорезистор (Ni-Cr)
Терморезистор
Наименование слоёв
Исполнительный компонент (Ti-Ni)
Диэлектрик (ПСФ)
Тензорезистор (Ni-Cr)
Терморезистор
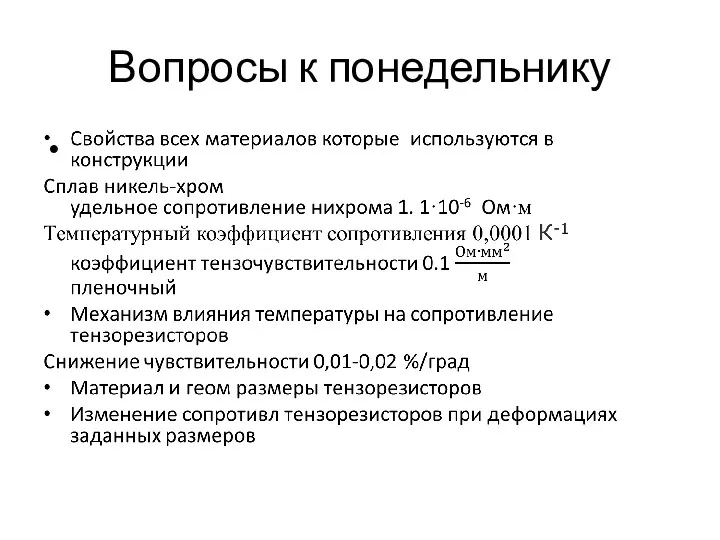
Вопросы к понедельнику
Вопросы к понедельнику
 презентация Оксиды
презентация Оксиды Проект обучающегося Как кошка заботится освоём потомстве
Проект обучающегося Как кошка заботится освоём потомстве Презентация к проекту Музыкально-эстетическое воспитание детей с ОВЗ
Презентация к проекту Музыкально-эстетическое воспитание детей с ОВЗ Предмет информатики. Понятие об информации. Принципы представления информации в ПК. Аппаратные и программные средства ПК
Предмет информатики. Понятие об информации. Принципы представления информации в ПК. Аппаратные и программные средства ПК Древние соборы
Древние соборы Многоугольники ( урок 1). 5 класс
Многоугольники ( урок 1). 5 класс Материалы и оборудование для капиллярного контроля сварных соединений. Капиллярный метод неразрушающего контроля
Материалы и оборудование для капиллярного контроля сварных соединений. Капиллярный метод неразрушающего контроля Вспомогательный аппарат мышц. Введение в биомеханику
Вспомогательный аппарат мышц. Введение в биомеханику Великая Отечественная война
Великая Отечественная война Технология строительства глубоких скважин на шельфе и на море
Технология строительства глубоких скважин на шельфе и на море Таблица умножения в стихах.
Таблица умножения в стихах. Соединенные Штаты Америки
Соединенные Штаты Америки Язык и стиль рекламы
Язык и стиль рекламы Интеграция учебных дисциплин, как условие формирования компетенции студентов.
Интеграция учебных дисциплин, как условие формирования компетенции студентов. Институт естественных наук и фармации
Институт естественных наук и фармации Металеві конструкції. Частина 2
Металеві конструкції. Частина 2 Ледоколы – покорители Арктики
Ледоколы – покорители Арктики Определение степени. Основное свойство степени
Определение степени. Основное свойство степени Сергей Антонович Клычков
Сергей Антонович Клычков История развития федерализма в России
История развития федерализма в России Трудности написания глаголов на - ять в настоящем (будущем) или в прошедшем времени
Трудности написания глаголов на - ять в настоящем (будущем) или в прошедшем времени Имя Ломоносова на карте. Ломоносов на карте мира
Имя Ломоносова на карте. Ломоносов на карте мира Создание условий в ДОО как средства обогащения предметно-развивающей среды формирования безопасности жизнедеятельности у дошкольников
Создание условий в ДОО как средства обогащения предметно-развивающей среды формирования безопасности жизнедеятельности у дошкольников Интерфейс и основные возможности графических редакторов
Интерфейс и основные возможности графических редакторов Итоговое родительское собрание в 4 классе.
Итоговое родительское собрание в 4 классе. Основы современной теории инвестиций
Основы современной теории инвестиций Модернизация технологической связи на станции Петербургского метрополитена
Модернизация технологической связи на станции Петербургского метрополитена Численность, естественный прирост и воспроизводство населения
Численность, естественный прирост и воспроизводство населения