- Модуль 7. Синтез микропрограммных автоматов с жёсткой логикой

Содержание
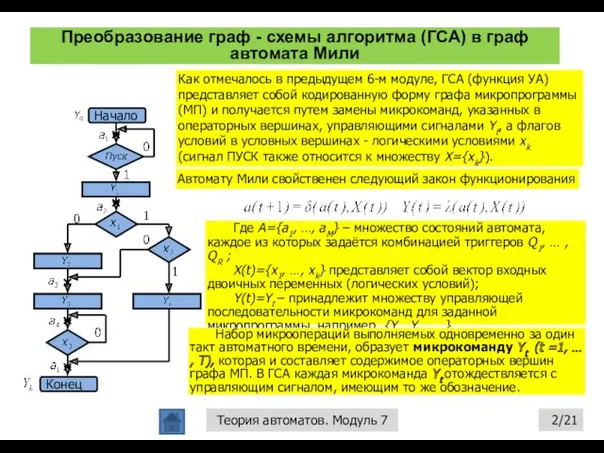
- 2. Преобразование граф - схемы алгоритма (ГСА) в граф автомата Мили /21 Теория автоматов. Модуль 7 Как
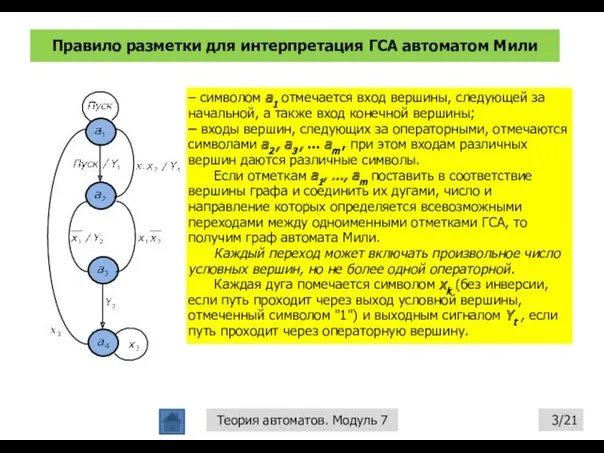
- 3. Правило разметки для интерпретация ГСА автоматом Мили /21 Теория автоматов. Модуль 7 – символом a1 отмечается
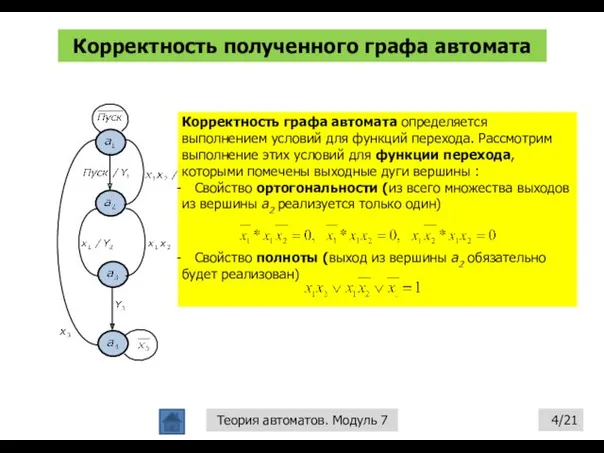
- 4. Корректность полученного графа автомата /21 Теория автоматов. Модуль 7 Корректность графа автомата определяется выполнением условий для
- 5. Реализация ГСА в тактах автомата Мили /21 Теория автоматов. Модуль 7 Работа автомата по выполнению микропрограммы
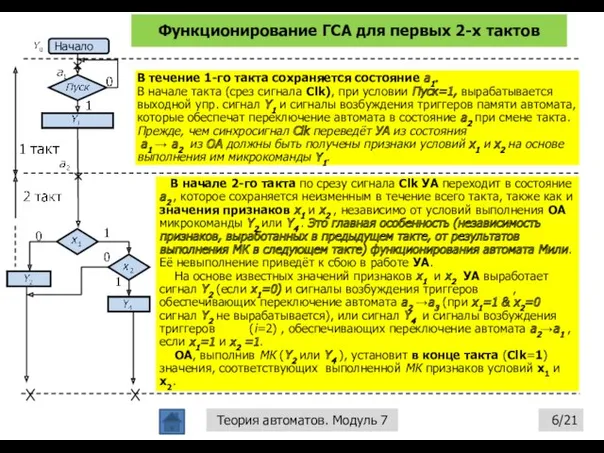
- 6. Функционирование ГСА для первых 2-х тактов /21 Теория автоматов. Модуль 7 В течение 1-го такта сохраняется
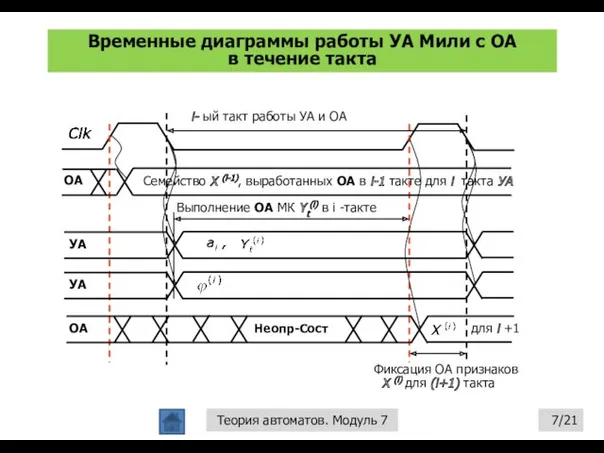
- 7. Временные диаграммы работы УА Мили с ОА в течение такта /21 Теория автоматов. Модуль 7
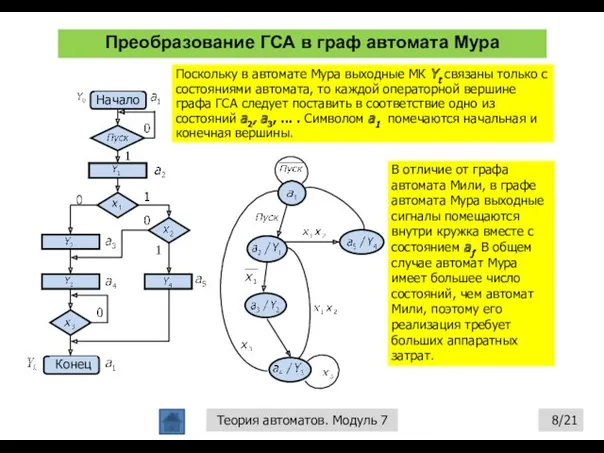
- 8. Преобразование ГСА в граф автомата Мура /21 Теория автоматов. Модуль 7 Поскольку в автомате Мура выходные
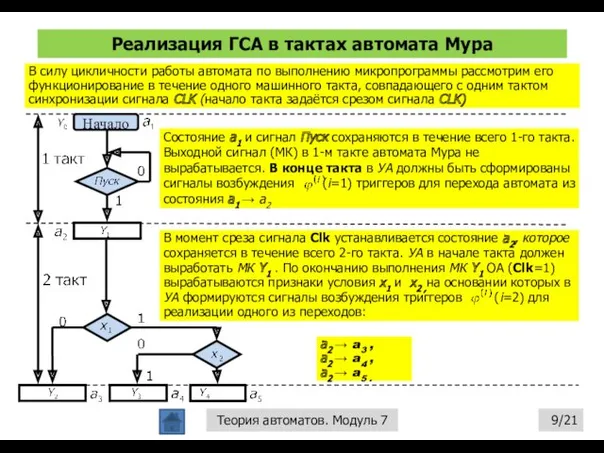
- 9. Реализация ГСА в тактах автомата Мура /21 Теория автоматов. Модуль 7 В силу цикличности работы автомата
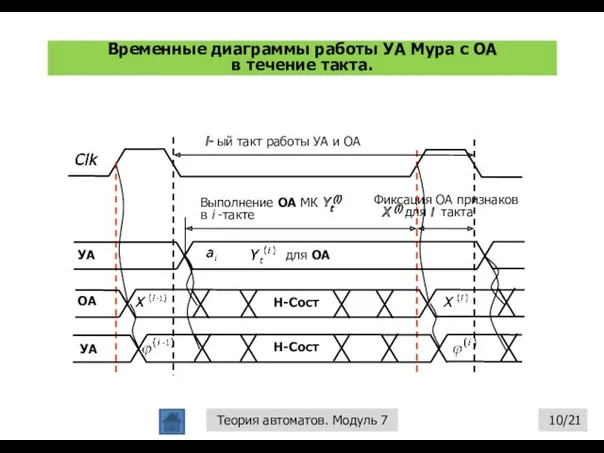
- 10. /21 Теория автоматов. Модуль 7 Временные диаграммы работы УА Мура с ОА в течение такта.
- 11. Интерпретационный метод синтез УА на основе структурной таблицы /21 Теория автоматов. Модуль 7 Канонический метод синтеза
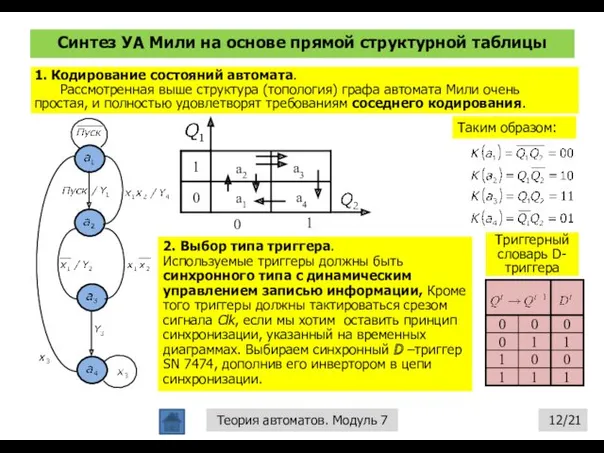
- 12. /21 Теория автоматов. Модуль 7 Синтез УА Мили на основе прямой структурной таблицы 1. Кодирование состояний
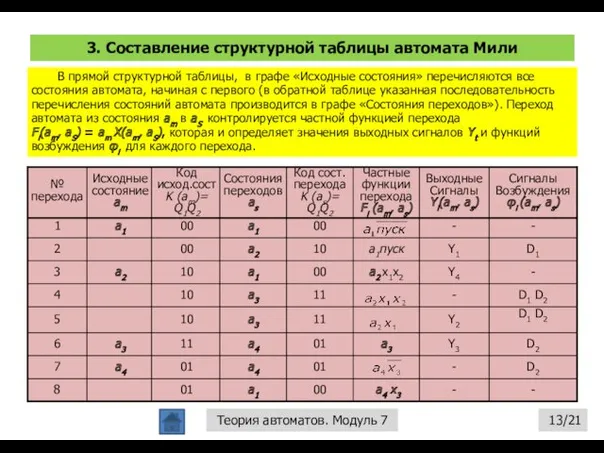
- 13. 3. Составление структурной таблицы автомата Мили /21 Теория автоматов. Модуль 7 В прямой структурной таблицы, в
- 14. 4. Запись логических выражений для выходных сигналов управления Yt и сигналов возбуждения триггеров φj /21 Теория
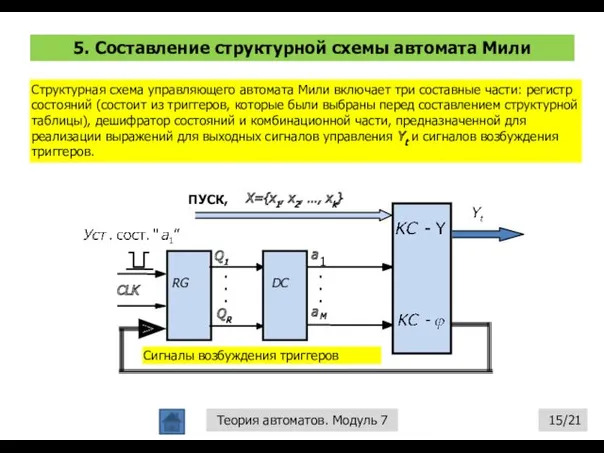
- 15. 5. Составление структурной схемы автомата Мили /21 Теория автоматов. Модуль 7 Структурная схема управляющего автомата Мили
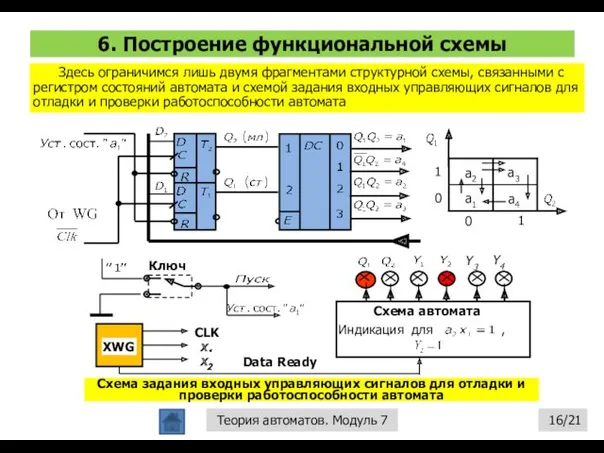
- 16. 6. Построение функциональной схемы /21 Теория автоматов. Модуль 7 Здесь ограничимся лишь двумя фрагментами структурной схемы,
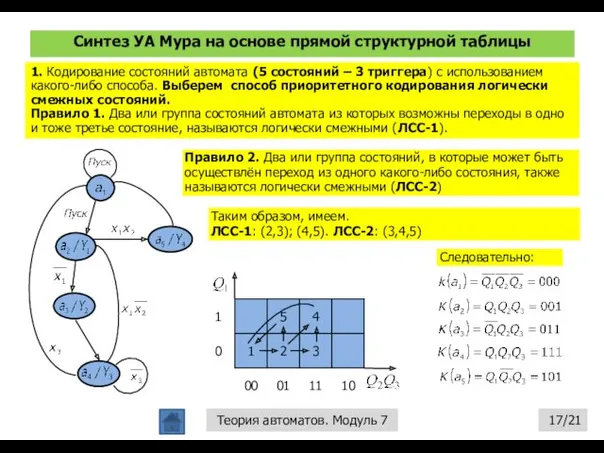
- 17. Синтез УА Мура на основе прямой структурной таблицы /21 Теория автоматов. Модуль 7 1. Кодирование состояний
- 18. 2 & 3. Выбор типа триггера и составление структурной таблицы /21 Теория автоматов. Модуль 7 Память
- 19. 4 & 5. Запись логических выражений для выходных сигналов управления Yt и сигналов возбуждения триггеров φj
- 20. 5. Построение функциональной схемы. /21 Теория автоматов. Модуль 7 Здесь ограничимся рассмотрением лишь интерфейса регистра состояний
- 22. Скачать презентацию
Преобразование граф - схемы алгоритма (ГСА) в граф автомата Мили
/21
Теория автоматов.
Преобразование граф - схемы алгоритма (ГСА) в граф автомата Мили
/21
Теория автоматов.
Правило разметки для интерпретация ГСА автоматом Мили
/21
Теория автоматов. Модуль 7
– символом
Правило разметки для интерпретация ГСА автоматом Мили
/21
Теория автоматов. Модуль 7
– символом
Корректность полученного графа автомата
/21
Теория автоматов. Модуль 7
Корректность графа автомата определяется выполнением
Корректность полученного графа автомата
/21
Теория автоматов. Модуль 7
Корректность графа автомата определяется выполнением
Реализация ГСА в тактах автомата Мили
/21
Теория автоматов. Модуль 7
Работа автомата по
Реализация ГСА в тактах автомата Мили
/21
Теория автоматов. Модуль 7
Работа автомата по
Функционирование ГСА для первых 2-х тактов
/21
Теория автоматов. Модуль 7
В течение 1-го
Функционирование ГСА для первых 2-х тактов
/21
Теория автоматов. Модуль 7
В течение 1-го
Временные диаграммы работы УА Мили с ОА
в течение такта
/21
Теория автоматов. Модуль
Временные диаграммы работы УА Мили с ОА
в течение такта
/21
Теория автоматов. Модуль
Преобразование ГСА в граф автомата Мура
/21
Теория автоматов. Модуль 7
Поскольку в автомате
Преобразование ГСА в граф автомата Мура
/21
Теория автоматов. Модуль 7
Поскольку в автомате
Реализация ГСА в тактах автомата Мура
/21
Теория автоматов. Модуль 7
В силу цикличности
Реализация ГСА в тактах автомата Мура
/21
Теория автоматов. Модуль 7
В силу цикличности
/21
Теория автоматов. Модуль 7
Временные диаграммы работы УА Мура с ОА
в течение
/21
Теория автоматов. Модуль 7
Временные диаграммы работы УА Мура с ОА
в течение
Интерпретационный метод синтез УА на основе структурной таблицы
/21
Теория автоматов. Модуль 7
Канонический
Интерпретационный метод синтез УА на основе структурной таблицы
/21
Теория автоматов. Модуль 7
Канонический
/21
Теория автоматов. Модуль 7
Синтез УА Мили на основе прямой структурной таблицы
1.
/21
Теория автоматов. Модуль 7
Синтез УА Мили на основе прямой структурной таблицы
1.
3. Составление структурной таблицы автомата Мили
/21
Теория автоматов. Модуль 7
В прямой структурной
3. Составление структурной таблицы автомата Мили
/21
Теория автоматов. Модуль 7
В прямой структурной
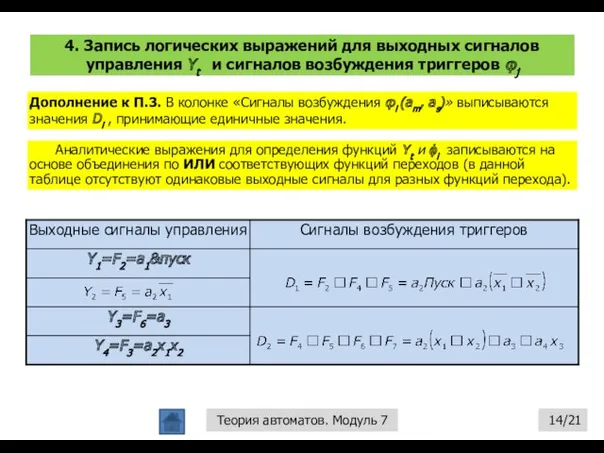
4. Запись логических выражений для выходных сигналов управления Yt и сигналов
4. Запись логических выражений для выходных сигналов управления Yt и сигналов
5. Составление структурной схемы автомата Мили
/21
Теория автоматов. Модуль 7
Структурная схема управляющего
5. Составление структурной схемы автомата Мили
/21
Теория автоматов. Модуль 7
Структурная схема управляющего
6. Построение функциональной схемы
/21
Теория автоматов. Модуль 7
Здесь ограничимся лишь двумя фрагментами
6. Построение функциональной схемы
/21
Теория автоматов. Модуль 7
Здесь ограничимся лишь двумя фрагментами
Синтез УА Мура на основе прямой структурной таблицы
/21
Теория автоматов. Модуль 7
1.
Синтез УА Мура на основе прямой структурной таблицы
/21
Теория автоматов. Модуль 7
1.
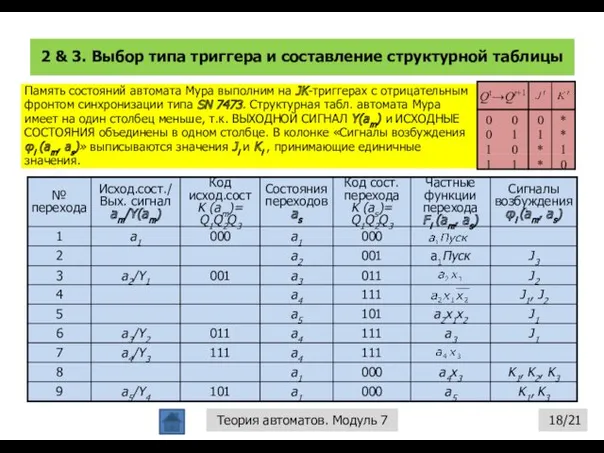
2 & 3. Выбор типа триггера и составление структурной таблицы
/21
Теория автоматов.
2 & 3. Выбор типа триггера и составление структурной таблицы
/21
Теория автоматов.
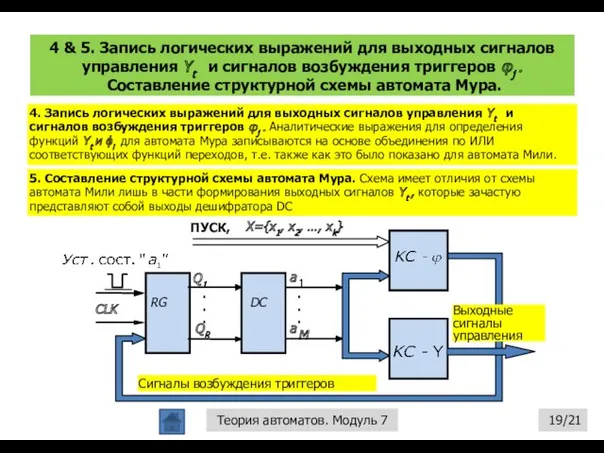
4 & 5. Запись логических выражений для выходных сигналов управления Yt
4 & 5. Запись логических выражений для выходных сигналов управления Yt
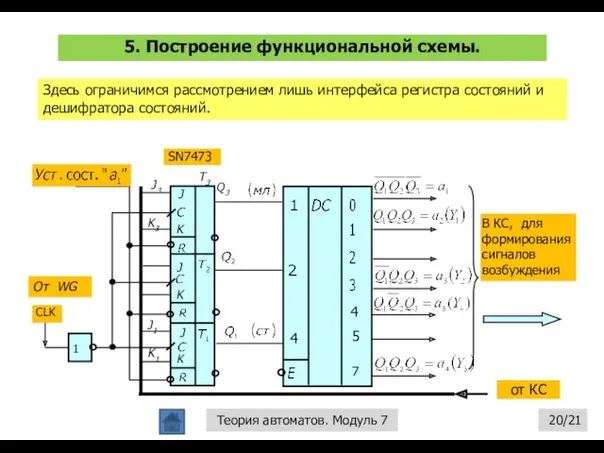
5. Построение функциональной схемы.
/21
Теория автоматов. Модуль 7
Здесь ограничимся рассмотрением лишь интерфейса
5. Построение функциональной схемы.
/21
Теория автоматов. Модуль 7
Здесь ограничимся рассмотрением лишь интерфейса
 Косвенные процесы в электролизе. Число переноса ионов
Косвенные процесы в электролизе. Число переноса ионов Цветок, eго строение и значeниe
Цветок, eго строение и значeниe Презентация к уроку географии 7-го класса Ядовитые обитатели Красного моря
Презентация к уроку географии 7-го класса Ядовитые обитатели Красного моря Ценностное предложение
Ценностное предложение Тема 6
Тема 6 ИКТ на уроках химии
ИКТ на уроках химии Индия. Страна мечты
Индия. Страна мечты Техническое обслуживание железнодорожного пути
Техническое обслуживание железнодорожного пути GreenPeace
GreenPeace Презентация к уроку географии на тему Изображение высот и глубин на картах.
Презентация к уроку географии на тему Изображение высот и глубин на картах. Методическое пособие по рисунку головы модели
Методическое пособие по рисунку головы модели История фабрики шоколада Россия, г. Самара
История фабрики шоколада Россия, г. Самара Византийская иконопись
Византийская иконопись История развития радиоэлектроники, приборостроения и техники инфокоммуникаций
История развития радиоэлектроники, приборостроения и техники инфокоммуникаций Презентация 23 февраля - День Защитника Отечества
Презентация 23 февраля - День Защитника Отечества 20230225_vlazhnost_vozduha
20230225_vlazhnost_vozduha Consciousness
Consciousness Первые итоги и перспективы 2017 года
Первые итоги и перспективы 2017 года Мультимедийная физминутка Зарядка
Мультимедийная физминутка Зарядка Типология государств современного мира
Типология государств современного мира Салауатты өмір салтын құру және аурудың алдын алу профилактикасы
Салауатты өмір салтын құру және аурудың алдын алу профилактикасы Мнение родителей (законных представителей) по вопросам введения новых стандартов.
Мнение родителей (законных представителей) по вопросам введения новых стандартов. Как моя семья пережила Великую Отечественную войну. Вязина Ксения
Как моя семья пережила Великую Отечественную войну. Вязина Ксения Почему со мной лучше встречаться в интернете
Почему со мной лучше встречаться в интернете Проект “Кто твой герой?”
Проект “Кто твой герой?” Работа с одарёнными детьми Основные концептуальные положения (слайд 2) 1. Урочная деятельность (слайд 4) включает в себя: Работа в парах (слайд 6) Проектно-исследовательская деятельность (слайд 8) фо
Работа с одарёнными детьми Основные концептуальные положения (слайд 2) 1. Урочная деятельность (слайд 4) включает в себя: Работа в парах (слайд 6) Проектно-исследовательская деятельность (слайд 8) фо Организация и проведение иммунопрофилактики детского населения
Организация и проведение иммунопрофилактики детского населения Психолого-педагогические условия при построении занятий в танцевальной аэробике
Психолого-педагогические условия при построении занятий в танцевальной аэробике