- Объекты управления и их основные свойства. Автоматизированное управление ХТС Лекция 4

Содержание
- 2. Под емкостью объекта (аккумулирующей способностью) обычно понимают его способность накапливать или сохранять вещество или энергию. Накопление
- 3. Объекты управления по числу емкостей подразделяются на одноемкостные и многоемкостные. Одноемкостный объект управления состоит из одного
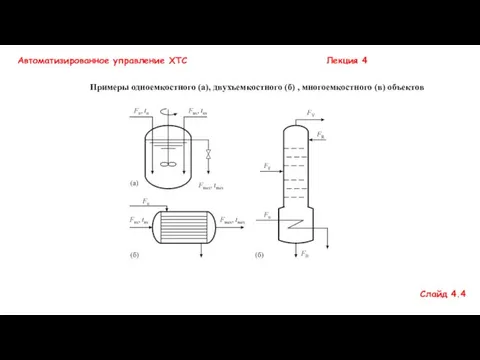
- 4. Автоматизированное управление ХТС Лекция 4 Примеры одноемкостного (а), двухъемкостного (б) , многоемкостного (в) объектов Слайд 4.4
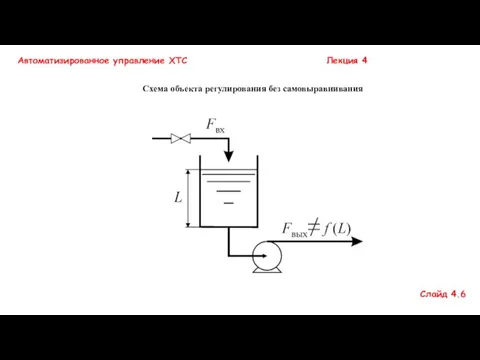
- 5. Состояние объекта может быть нарушено в результате изменения материальных или энергетических потоков (притока или стока), т.
- 6. Автоматизированное управление ХТС Лекция 4 Схема объекта регулирования без самовыравнивания Слайд 4.6
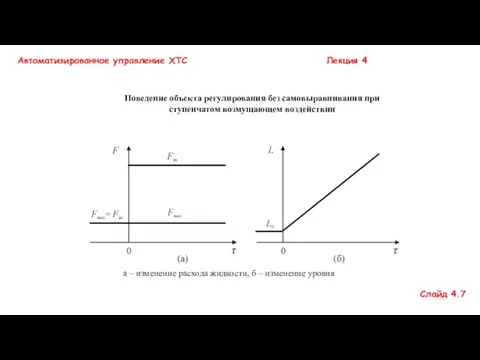
- 7. Автоматизированное управление ХТС Лекция 4 Поведение объекта регулирования без самовыравнивания при ступенчатом возмущающем воздействии а –
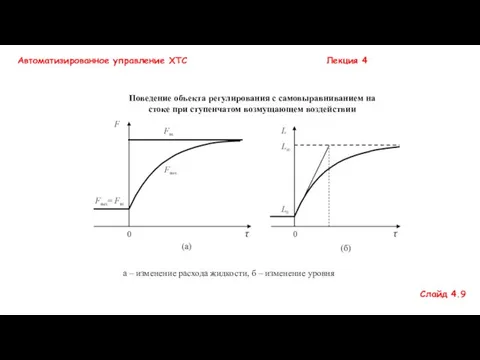
- 8. Способность объекта прийти после нанесения возмущающего воздействия в новое установившееся состояние без вмешательства управляющего устройства называется
- 9. Автоматизированное управление ХТС Лекция 4 Поведение объекта регулирования с самовыравниванием на стоке при ступенчатом возмущающем воздействии
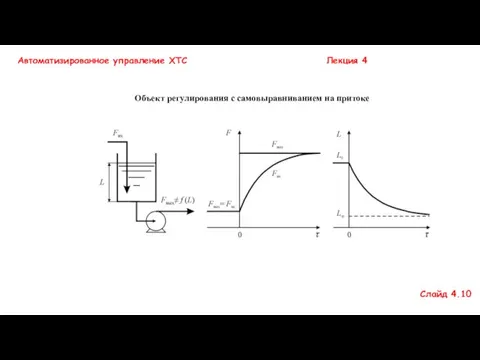
- 10. Автоматизированное управление ХТС Лекция 4 Объект регулирования с самовыравниванием на притоке Слайд 4.10
- 11. Объекты с отрицательным самовыравниванием (неустойчивые) В объектах с отрицательным самовыравниванием (неустойчивых объектах) изменение выходного параметра, вызванное
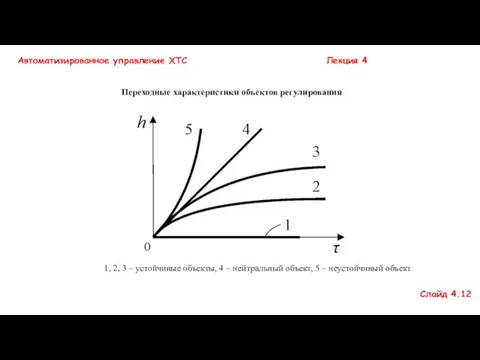
- 12. Автоматизированное управление ХТС Лекция 4 Переходные характеристики объектов регулирования 1, 2, 3 – устойчивые объекты, 4
- 13. Свойство объектов, проявляющееся в том, что между моментом нарушения равновесия (входным воздействием) и началом изменения выходной
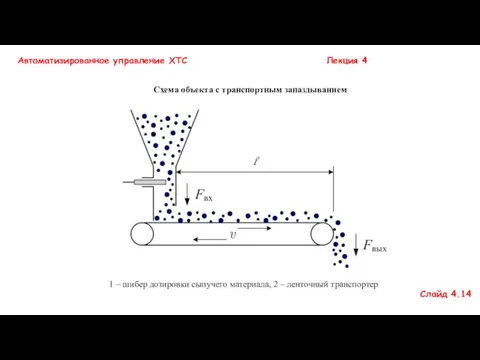
- 14. Автоматизированное управление ХТС Лекция 4 Схема объекта с транспортным запаздыванием 1 – шибер дозировки сыпучего материала,
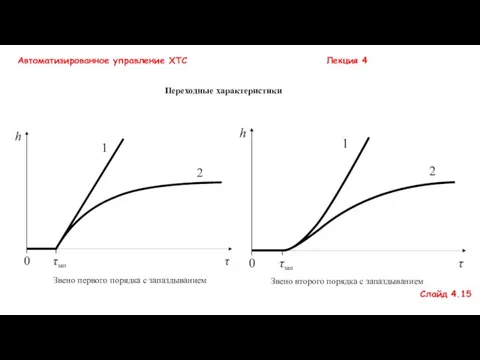
- 15. Автоматизированное управление ХТС Лекция 4 Переходные характеристики Звено первого порядка с запаздыванием Звено второго порядка с
- 16. В многоемкостных объектах переходное запаздывание возникает при преодолении потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые
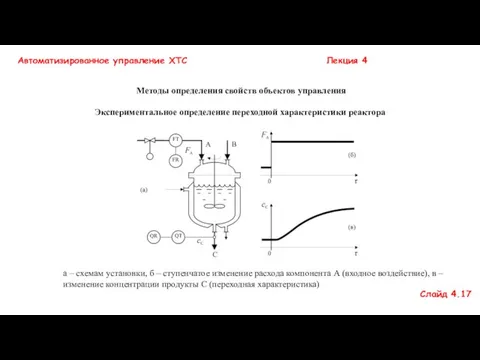
- 17. Автоматизированное управление ХТС Лекция 4 Методы определения свойств объектов управления Экспериментальное определение переходной характеристики реактора а
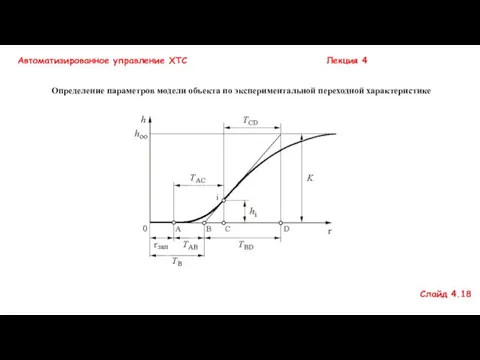
- 18. Автоматизированное управление ХТС Лекция 4 Определение параметров модели объекта по экспериментальной переходной характеристике Слайд 4.18
- 20. Скачать презентацию
Под емкостью объекта (аккумулирующей способностью) обычно понимают его способность накапливать или
Под емкостью объекта (аккумулирующей способностью) обычно понимают его способность накапливать или
Объекты управления по числу емкостей подразделяются на одноемкостные и многоемкостные. Одноемкостный
Объекты управления по числу емкостей подразделяются на одноемкостные и многоемкостные. Одноемкостный
Автоматизированное управление ХТС Лекция 4
Примеры одноемкостного (а), двухъемкостного (б) , многоемкостного
Автоматизированное управление ХТС Лекция 4
Примеры одноемкостного (а), двухъемкостного (б) , многоемкостного
Состояние объекта может быть нарушено в результате изменения материальных или энергетических
Состояние объекта может быть нарушено в результате изменения материальных или энергетических
Автоматизированное управление ХТС Лекция 4
Схема объекта регулирования без самовыравнивания
Слайд 4.6
Автоматизированное управление ХТС Лекция 4
Схема объекта регулирования без самовыравнивания
Слайд 4.6
Автоматизированное управление ХТС Лекция 4
Поведение объекта регулирования без самовыравнивания при ступенчатом
Автоматизированное управление ХТС Лекция 4
Поведение объекта регулирования без самовыравнивания при ступенчатом

Способность объекта прийти после нанесения возмущающего воздействия в новое установившееся состояние
Способность объекта прийти после нанесения возмущающего воздействия в новое установившееся состояние
Автоматизированное управление ХТС Лекция 4
Поведение объекта регулирования с самовыравниванием на стоке
Автоматизированное управление ХТС Лекция 4
Поведение объекта регулирования с самовыравниванием на стоке
Автоматизированное управление ХТС Лекция 4
Объект регулирования с самовыравниванием на притоке
Слайд
Автоматизированное управление ХТС Лекция 4
Объект регулирования с самовыравниванием на притоке
Слайд

Объекты с отрицательным самовыравниванием (неустойчивые)
В объектах с отрицательным самовыравниванием (неустойчивых объектах)
Объекты с отрицательным самовыравниванием (неустойчивые)
В объектах с отрицательным самовыравниванием (неустойчивых объектах)
Автоматизированное управление ХТС Лекция 4
Переходные характеристики объектов регулирования
1, 2, 3 –
Автоматизированное управление ХТС Лекция 4
Переходные характеристики объектов регулирования
1, 2, 3 –
Свойство объектов, проявляющееся в том, что между моментом нарушения равновесия (входным
Свойство объектов, проявляющееся в том, что между моментом нарушения равновесия (входным
Автоматизированное управление ХТС Лекция 4
Схема объекта с транспортным запаздыванием
1 – шибер
Автоматизированное управление ХТС Лекция 4
Схема объекта с транспортным запаздыванием
1 – шибер
Автоматизированное управление ХТС Лекция 4
Переходные характеристики
Звено первого порядка с запаздыванием
Звено второго
Автоматизированное управление ХТС Лекция 4
Переходные характеристики
Звено первого порядка с запаздыванием
Звено второго
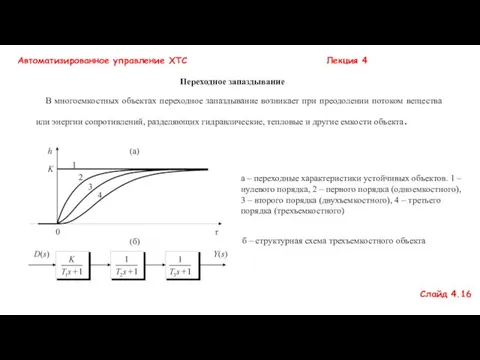
В многоемкостных объектах переходное запаздывание возникает при преодолении потоком вещества или
В многоемкостных объектах переходное запаздывание возникает при преодолении потоком вещества или
Автоматизированное управление ХТС Лекция 4
Методы определения свойств объектов управления
Экспериментальное определение
Автоматизированное управление ХТС Лекция 4
Методы определения свойств объектов управления
Экспериментальное определение
Автоматизированное управление ХТС Лекция 4
Определение параметров модели объекта по экспериментальной
Автоматизированное управление ХТС Лекция 4
Определение параметров модели объекта по экспериментальной
 ММ-задание по R-диагностике заболеваний органов дыхания
ММ-задание по R-диагностике заболеваний органов дыхания Магнитное поле.Вектор магнитной индукции
Магнитное поле.Вектор магнитной индукции Единый деловой стиль одежды в школе
Единый деловой стиль одежды в школе Детские вопросы и как на них отвечать
Детские вопросы и как на них отвечать Найди недостающий фрагмент. Развивающая игра для детей
Найди недостающий фрагмент. Развивающая игра для детей Инновационный менеджмент. Лекция 2
Инновационный менеджмент. Лекция 2 Приглашение на свадьбу
Приглашение на свадьбу Электрические колебания. Переменный ток
Электрические колебания. Переменный ток родительское собрание
родительское собрание Bekanntschaft. Thema 1
Bekanntschaft. Thema 1 Кодирование информации, 8 класс
Кодирование информации, 8 класс книга, презентация
книга, презентация Лексикология и ее разделы
Лексикология и ее разделы Особенности проекта НВАЭС-2
Особенности проекта НВАЭС-2 Профилактика наследственных заболеваний. (Лекция 6)
Профилактика наследственных заболеваний. (Лекция 6) Поговорил бы кто со мной...Телефон доверия.
Поговорил бы кто со мной...Телефон доверия. Моя профессия педагог-психолог
Моя профессия педагог-психолог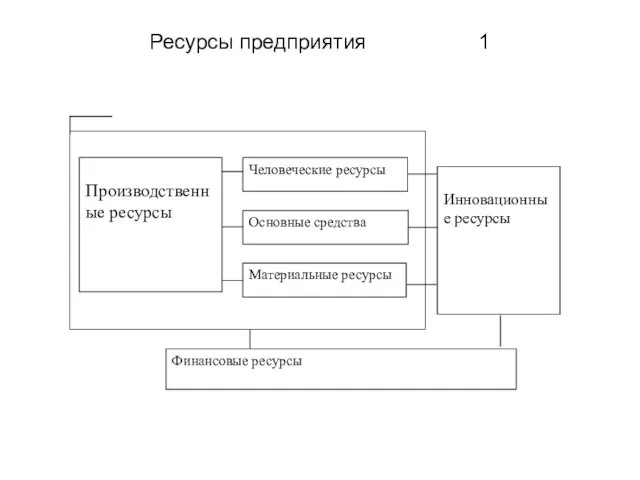 Ресурсы предприятия
Ресурсы предприятия Презентация. Летний оздоровительный лагерь.
Презентация. Летний оздоровительный лагерь. Автоматизация звука [Л]
Автоматизация звука [Л] Вопросы знатокам 10-11 классов
Вопросы знатокам 10-11 классов Дорожные знаки. Что расскажет улица
Дорожные знаки. Что расскажет улица Культура Ярославского края в 19 веке. 4 класс
Культура Ярославского края в 19 веке. 4 класс Толкование норм права
Толкование норм права Метод качественной оценки риска
Метод качественной оценки риска Эволюция менеджмента
Эволюция менеджмента Город сквозь времена и страны
Город сквозь времена и страны iGRUShKI_IZ_POROLONA_aGAFONOVA_r_R
iGRUShKI_IZ_POROLONA_aGAFONOVA_r_R