- Обмен данными в комплексе УРТК и представление соответствующих команд

Содержание
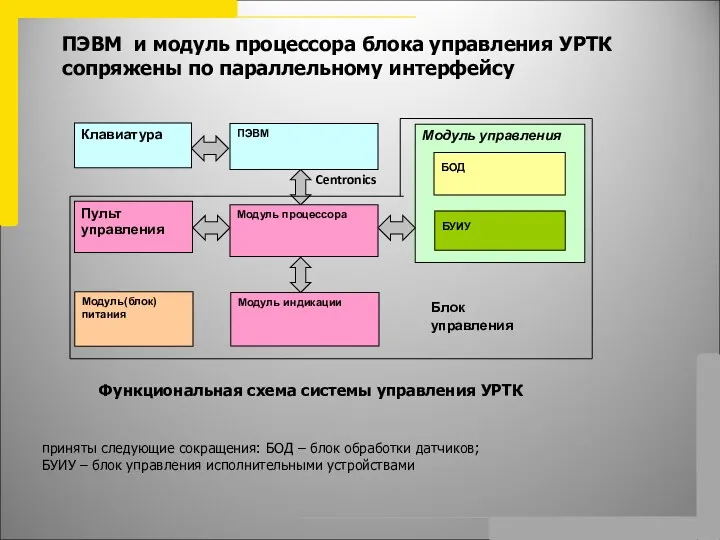
- 2. * приняты следующие сокращения: БОД – блок обработки датчиков; БУИУ – блок управления исполнительными устройствами ПЭВМ
- 3. * Это микросхема I 8255 являлась устройством сопряжения интерфейсной платы Centronics с микро- процессорным модулем блока
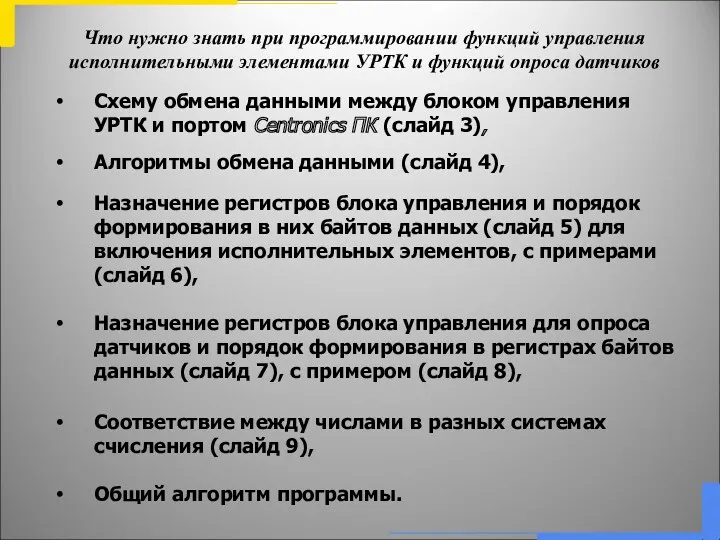
- 4. * Что нужно знать при программировании функций управления исполнительными элементами УРТК и функций опроса датчиков Схему
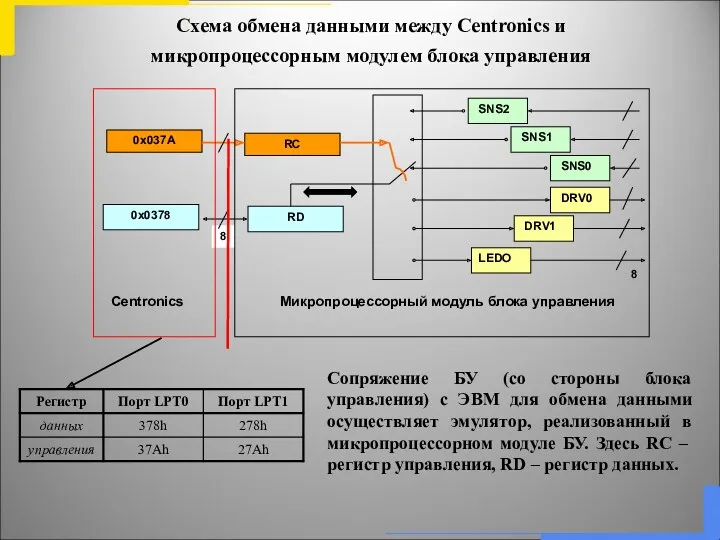
- 5. * Схема обмена данными между Centronics и микропроцессорным модулем блока управления Сопряжение БУ (со стороны блока
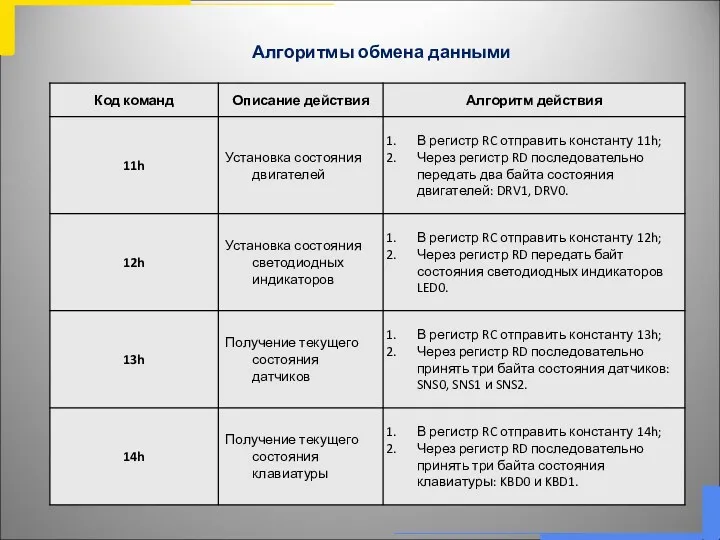
- 6. * Алгоритмы обмена данными
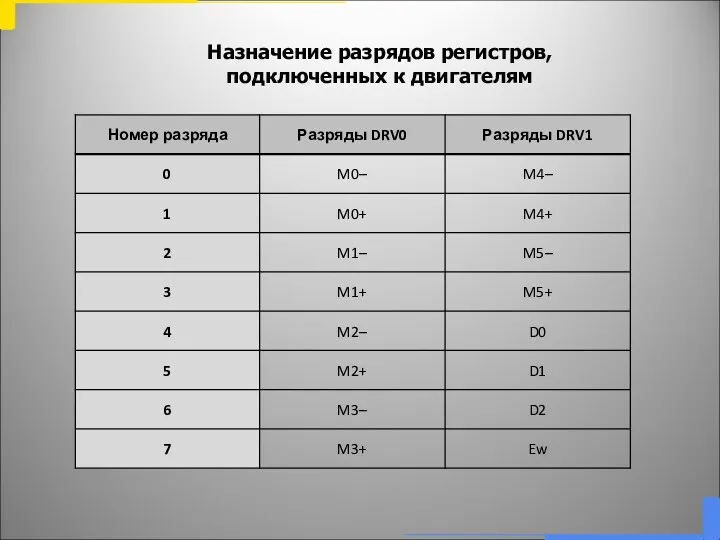
- 7. * Назначение разрядов регистров, подключенных к двигателям
- 8. * Пример команд на включение двигателей а) М0+ б) М0+ и М2-
- 9. * Назначение разрядов регистров, подключенных к датчикам
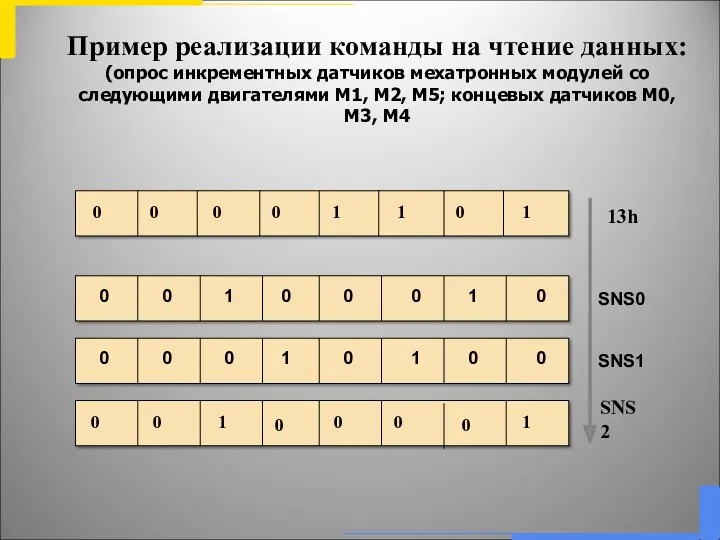
- 10. * Пример реализации команды на чтение данных: (опрос инкрементных датчиков мехатронных модулей со следующими двигателями М1,
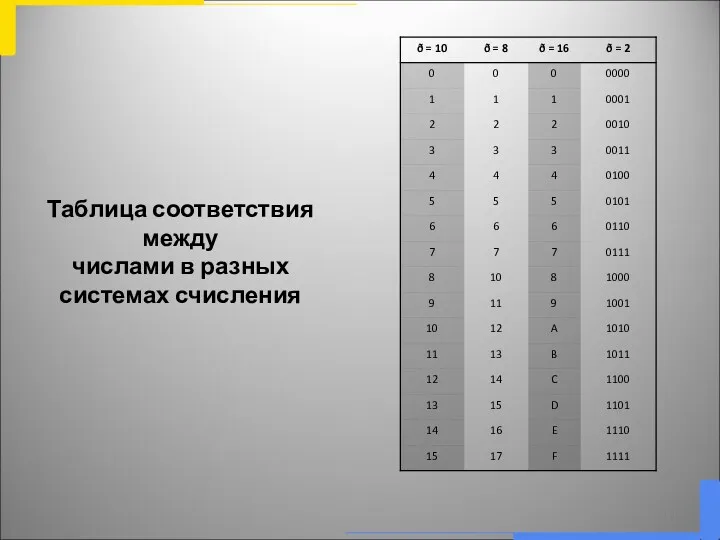
- 11. * Таблица соответствия между числами в разных системах счисления
- 13. Скачать презентацию
*
приняты следующие сокращения: БОД – блок обработки датчиков;
БУИУ – блок
*
приняты следующие сокращения: БОД – блок обработки датчиков;
БУИУ – блок

*
Это микросхема I 8255
являлась устройством
сопряжения интерфейсной
платы Centronics с микро-
процессорным модулем
*
Это микросхема I 8255
являлась устройством
сопряжения интерфейсной
платы Centronics с микро-
процессорным модулем
*
Что нужно знать при программировании функций управления исполнительными элементами УРТК и
*
Что нужно знать при программировании функций управления исполнительными элементами УРТК и
*
Схема обмена данными между Centronics и
микропроцессорным модулем блока управления
Сопряжение БУ
*
Схема обмена данными между Centronics и
микропроцессорным модулем блока управления
Сопряжение БУ
*
Алгоритмы обмена данными
*
Алгоритмы обмена данными
*
Назначение разрядов регистров,
подключенных к двигателям
*
Назначение разрядов регистров,
подключенных к двигателям

*
Пример команд на включение двигателей
а) М0+
б) М0+ и М2-
*
Пример команд на включение двигателей
а) М0+
б) М0+ и М2-

*
Назначение разрядов регистров,
подключенных к датчикам
*
Назначение разрядов регистров,
подключенных к датчикам
*
Пример реализации команды на чтение данных:
(опрос инкрементных датчиков мехатронных модулей со
*
Пример реализации команды на чтение данных:
(опрос инкрементных датчиков мехатронных модулей со
*
Таблица соответствия между
числами в разных системах счисления
*
Таблица соответствия между
числами в разных системах счисления
 Стратегия развития агропромышленного и рыбохозяйственного комплексов Российской Федерации
Стратегия развития агропромышленного и рыбохозяйственного комплексов Российской Федерации Презентация Ты, Кубань, ты наша Родина(часть 2)
Презентация Ты, Кубань, ты наша Родина(часть 2) Colours. Rainbow
Colours. Rainbow Мышление. Мыслительные операции
Мышление. Мыслительные операции Демография
Демография Презентация проекта 9 Мая в старшей группе
Презентация проекта 9 Мая в старшей группе Графический исполнитель Кенгуренок (ROO) 9 класс
Графический исполнитель Кенгуренок (ROO) 9 класс Учебники математики для начальной школы издательства Просвещение: о новом Федеральном перечне учебников
Учебники математики для начальной школы издательства Просвещение: о новом Федеральном перечне учебников Теория эмоциональных систем М. Боуэна
Теория эмоциональных систем М. Боуэна Тема поэта и поэзии в лирике А.С. Пушкина
Тема поэта и поэзии в лирике А.С. Пушкина ветер
ветер Работа с учебной книгой на уроках биологии
Работа с учебной книгой на уроках биологии Дисковый фильтр. Техническое описание
Дисковый фильтр. Техническое описание презентация - проектная деятельность Как жили люди на Руси?
презентация - проектная деятельность Как жили люди на Руси? Внеурочная деятельность как система работы с одарёнными детьми
Внеурочная деятельность как система работы с одарёнными детьми Франция в середине XIX века. Промышленный переворот
Франция в середине XIX века. Промышленный переворот Шаблон 23 февраля
Шаблон 23 февраля Инструментальные методы исследования
Инструментальные методы исследования Основоположник авторской песни – Булат Окуджава
Основоположник авторской песни – Булат Окуджава Презентация для детей старшей группы Русская матрешка
Презентация для детей старшей группы Русская матрешка Что такое толерантность
Что такое толерантность Системы рекуперации в вентиляции помещений и создание комфортного микроклимата
Системы рекуперации в вентиляции помещений и создание комфортного микроклимата Квіти Волині
Квіти Волині Воспитательная работа в ГПД
Воспитательная работа в ГПД Разработка энергосберегающей технологии очистки продуктов пчеловодства от органических загрязнений
Разработка энергосберегающей технологии очистки продуктов пчеловодства от органических загрязнений Ветер
Ветер Степень с рациональным показателем и ее свойства
Степень с рациональным показателем и ее свойства Химия в жизни общества
Химия в жизни общества