- Образовательная робототехника на базе набора Lego Education Mindstorms EV3

Содержание
- 2. Что такое – РОБОТ? Устройство, выполняющее полезную работу автоматически (под управлением программы) Для чего нужны роботы?
- 3. КАК СОЗДАТЬ РОБОТА? ПОСТАНОВКА ЗАДАЧИ Что и как должен делать робот? ПРОЕКТИРОВАНИЕ Проектирование конструкции, подбор датчиков,
- 4. КАК ПРОЕКТИРОВАТЬ И КОНСТРУИРОВАТЬ РОБОТА? На бумаге («в ручную») С помощью компьютерных программ для проектирования (
- 5. КАК СОЗДАТЬ АЛГОРИТМ И ЗАПРОГРАММИРОВАТЬ РОБОТА? 1. СОЗДАНИЕ АЛГОРИТМА 2. ПРОГРАММИРОВАНИЕ Если то .. Повторить действия
- 6. РОБОТОТЕХНИКА – МУЛЬТИПРЕДМЕТНАЯ ПРИКЛАДНАЯ НАУКА МЫ ДОЛЖНЫ УМЕТЬ: УМЕТЬ СЧИТАТЬ (Математика) УМЕТЬ КОНСТРУИРОВАТЬ (Геометрия, Физика, Механика,
- 7. Набор для изучения робототехники Lego Education Mindstorms EV3
- 8. Из чего состоит робот?
- 9. LEGO Mindstorms EV3 Электронные компоненты Механические компоненты
- 10. Электронные компоненты: Контроллер(модуль) Датчики Моторы
- 11. Детали для конструирования
- 12. Оси и балки. Размеры в модулях. Длина балок и других деталей измеряется в единицах LEGO, иногда
- 13. Штифты.
- 14. Четыре типа балок с прямым углом (90 градусов) Две балки с углом 53,13 градуса. Угловые балки
- 15. Оси свободно вращаются в круглых отверстиях, а в крестовых образуют жесткое соединение Соединение осей и балок.
- 16. Фиксаторы. Соединение осей.
- 17. Фиксаторы. Соединение параллельных балок в случае, если их отверстия обращены друг к другу
- 18. Фиксаторы. Соединение параллельных балок, если их плоские стороны обращены друг к другу. (Числа в кружочках обозначают
- 19. Фиксаторы. Соединения балок под прямым углом. (Серые оси на рисунке имеют длину 3М)
- 20. Некоторые фиксаторы приводят к смещению деталей на 0,5М относительно квадрата размерной сетки. Балка в середине смещена
- 21. Тяги и шаровые соединения. Тяги можно применить в некоторых конструкциях в качестве замены для балок. Хотя
- 22. Конструкции с моторами, колесами и гусеницами
- 23. Основные компоненты робота Сервомоторы Мышцы человека
- 24. Большие моторы. Моторы довольно велики, и у них есть множество точек крепления для штифтов и осей.
- 25. Средний мотор. Средний мотор меньше по размеру, чем большой, что позволяет использовать его в небольших конструкциях,
- 26. Двигатели (моторы) И Движители
- 27. Дви́житель — устройство, преобразующее энергию двигателя либо внешнего источника, через взаимодействие со средой, в полезную работу
- 28. Колеса. Колеса можно подключить непосредственно к большому мотору с помощью оси 6М. Половинчатая втулка создает небольшое
- 29. Гусеницы. Вы можете подключить диски гусеничного движителя к большому мотору с помощью двух балок длиной 13M
- 30. Механическая передача Как передать силу двигателя к движителю? (Например от автомобильного мотора к колесам) Как менять
- 31. Угловая зубчатая передача Дифференциал Планетарная передача Реечная передача Прямая зубчатая передача Червячная передача
- 32. Цепная передача Кривошипно-шатунный механизм (каленвал) Ременная передача
- 33. Конструирование с зубчатыми колесами
- 34. Зубчатые колеса (шестеренки). Зубчатые колеса служат для передачи вращения и силы (крутящего момента). Такая передача называется
- 35. С помощью зубчатой передачи можно менять: Скорость вращения Силу (крутящий момент) Равная передача: не меняет скорость
- 36. Угловые зубчатые передачи служат для передачи вращения под углом.
- 38. Кноб-колеса. Используйте кноб-колеса для передачи движения с параллельными осями (вверху) и с перпендикулярными (внизу)
- 39. Червячное колесо может двигать прямозубые зубчатые колеса. Такая передача работает только в одну сторону – от
- 40. Другие виды зубчатых передач
- 41. Конструкции с датчиками
- 42. Каждый датчик имеет точки крепления для одной оси и двух штифтов. Кроме того, инфракрасный и ультразвуковой
- 43. Датчик касания
- 44. Датчик касания Тактильные ощущения Датчик касания
- 45. Датчик цвета
- 46. Ультразвуковой датчик расстояния
- 47. ИК-датчик позволяет роботу «видеть» окрестности путем измерения приблизительного расстояния до объекта с помощью инфракрасных лучей. Кроме
- 48. -Датчик цвета Ультразвуковой датчик Инфракрасный датчик Глаза
- 49. Гироскоп 7 Чувство баланса Гироскопический датчик
- 50. Модуль EV3
- 51. Контроллер EV3 - ум и сердце вашего робота. Обеспечивает управление и служит источником питания
- 52. Порты подключения Порты 1, 2, 3 и 4 используются для подключения датчиков к контроллеру EV3. Порты
- 53. Кнопки блока 1 3 2 3 3 3 Возврат Отменить Остановить программу Отключить робота 1 2
- 54. Способы управления роботом
- 55. РОБОТ = + + Аппаратные средства Конструкция из деталей Управление
- 56. Способы управления роботом: Программное управление Программирование на компьютере Программирование на модуле Ручное управление Пультом управления Через
- 57. Среда программирования
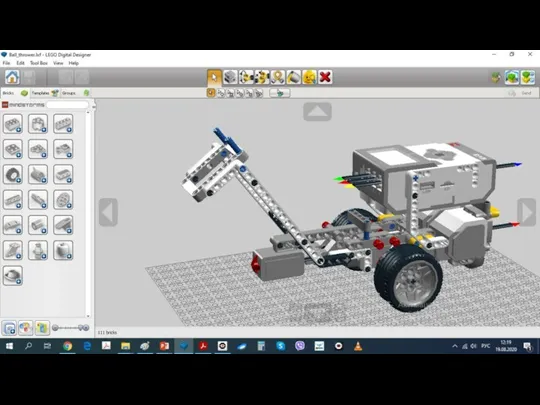
- 60. Среда проектирования
- 62. ЗАПУСК СРЕДЫ ПРОГРАММИРОВАНИЯ
- 63. Запустите программу LEGO MINDSTORMS Education EV3
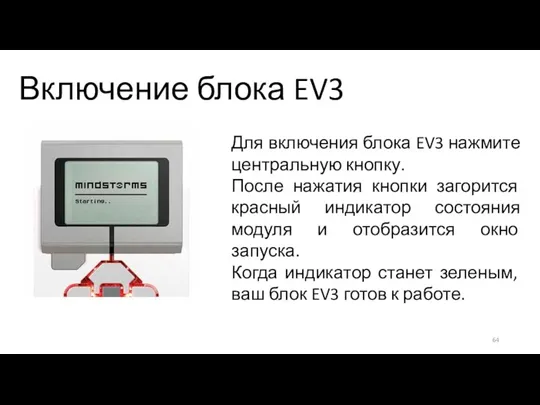
- 64. Включение блока EV3 Для включения блока EV3 нажмите центральную кнопку. После нажатия кнопки загорится красный индикатор
- 65. Каждый модуль имеет свое уникальное имя (номер). Подключите ваш модуль к вашему ноутбуку!
- 66. Нажмите кнопку «Обновить» Произойдет поиск всех доступных Модулей-EV3, найденных поблизости Выберите из списка свой (!) Модуль-EV3
- 67. После подключения вашего(!) Модуля-EV3 к вашему(!) компьютеру, можно посмотреть все подключенные к Модулю устройства
- 69. Скачать презентацию

Что такое – РОБОТ?
Устройство, выполняющее полезную работу автоматически (под управлением программы)
Для
Что такое – РОБОТ?
Устройство, выполняющее полезную работу автоматически (под управлением программы)
Для
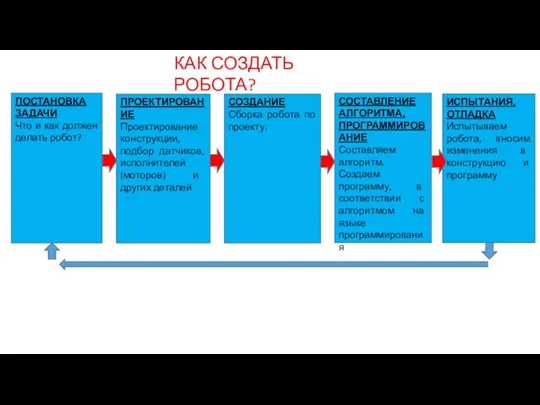
КАК СОЗДАТЬ РОБОТА?
ПОСТАНОВКА ЗАДАЧИ
Что и как должен делать робот?
ПРОЕКТИРОВАНИЕ
Проектирование конструкции, подбор
КАК СОЗДАТЬ РОБОТА?
ПОСТАНОВКА ЗАДАЧИ
Что и как должен делать робот?
ПРОЕКТИРОВАНИЕ
Проектирование конструкции, подбор
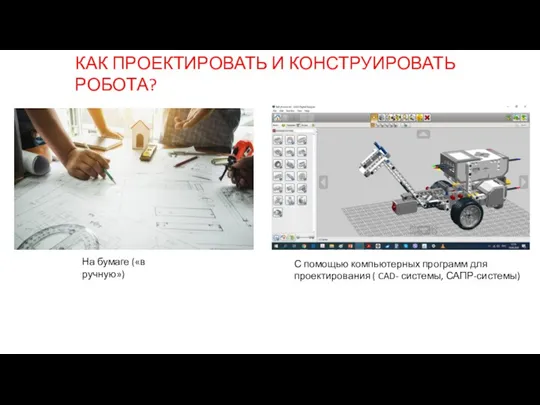
КАК ПРОЕКТИРОВАТЬ И КОНСТРУИРОВАТЬ РОБОТА?
На бумаге («в ручную»)
С помощью компьютерных программ
КАК ПРОЕКТИРОВАТЬ И КОНСТРУИРОВАТЬ РОБОТА?
На бумаге («в ручную»)
С помощью компьютерных программ
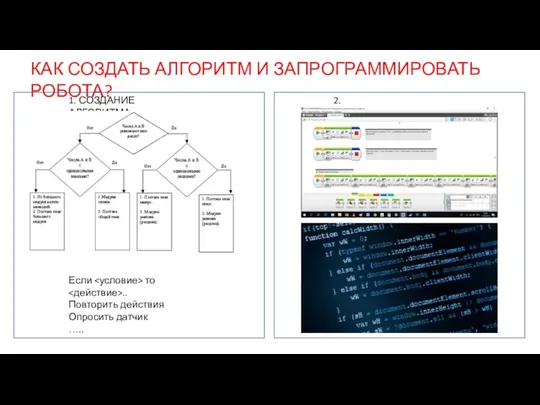
КАК СОЗДАТЬ АЛГОРИТМ И ЗАПРОГРАММИРОВАТЬ РОБОТА?
1. СОЗДАНИЕ АЛГОРИТМА
2. ПРОГРАММИРОВАНИЕ
Если <условие> то
КАК СОЗДАТЬ АЛГОРИТМ И ЗАПРОГРАММИРОВАТЬ РОБОТА?
1. СОЗДАНИЕ АЛГОРИТМА
2. ПРОГРАММИРОВАНИЕ
Если <условие> то
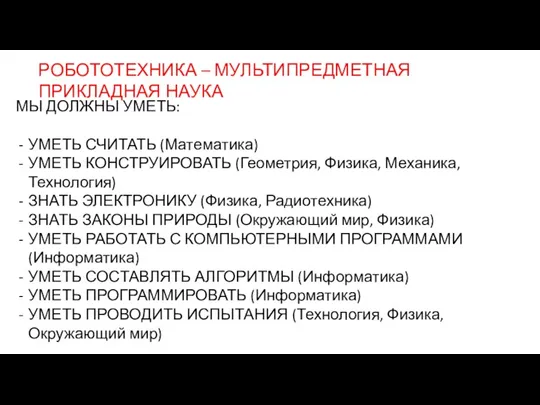
РОБОТОТЕХНИКА – МУЛЬТИПРЕДМЕТНАЯ ПРИКЛАДНАЯ НАУКА
МЫ ДОЛЖНЫ УМЕТЬ:
УМЕТЬ СЧИТАТЬ (Математика)
УМЕТЬ КОНСТРУИРОВАТЬ (Геометрия,
РОБОТОТЕХНИКА – МУЛЬТИПРЕДМЕТНАЯ ПРИКЛАДНАЯ НАУКА
МЫ ДОЛЖНЫ УМЕТЬ:
УМЕТЬ СЧИТАТЬ (Математика)
УМЕТЬ КОНСТРУИРОВАТЬ (Геометрия,
Набор для изучения робототехники
Lego Education Mindstorms EV3
Набор для изучения робототехники
Lego Education Mindstorms EV3
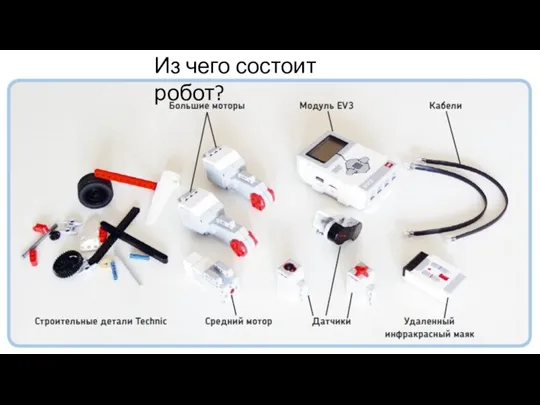
Из чего состоит робот?
Из чего состоит робот?

LEGO Mindstorms EV3
Электронные компоненты
Механические компоненты
LEGO Mindstorms EV3
Электронные компоненты
Механические компоненты
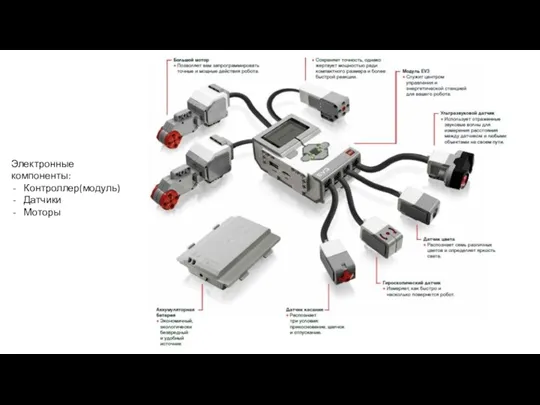
Электронные компоненты:
Контроллер(модуль)
Датчики
Моторы
Электронные компоненты:
Контроллер(модуль)
Датчики
Моторы

Детали для конструирования
Детали для конструирования

Оси и балки. Размеры в модулях.
Длина балок и других деталей измеряется в единицах
Оси и балки. Размеры в модулях.
Длина балок и других деталей измеряется в единицах
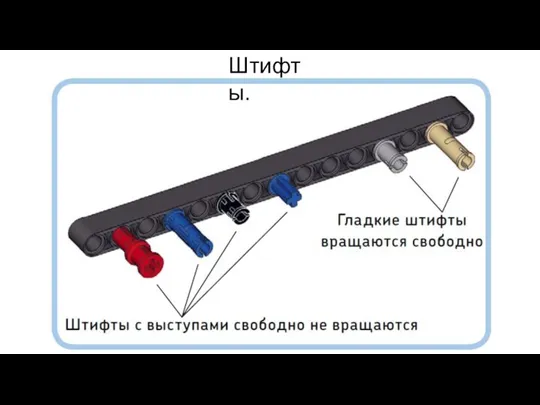
Штифты.
Штифты.
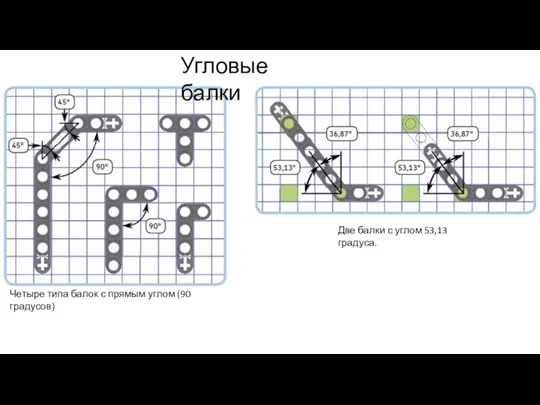
Четыре типа балок с прямым углом (90 градусов)
Две балки с углом 53,13 градуса.
Угловые
Четыре типа балок с прямым углом (90 градусов)
Две балки с углом 53,13 градуса.
Угловые

Оси свободно вращаются в круглых отверстиях, а в крестовых образуют жесткое соединение
Соединение осей и
Оси свободно вращаются в круглых отверстиях, а в крестовых образуют жесткое соединение
Соединение осей и
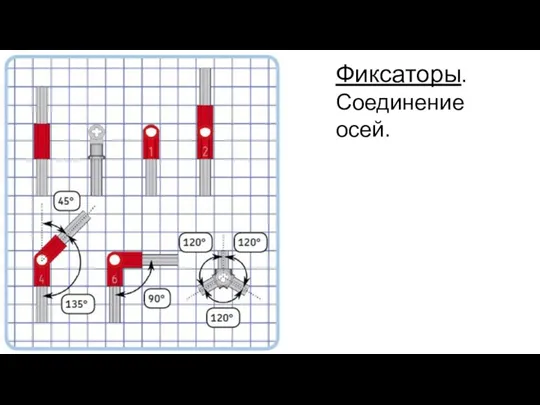
Фиксаторы.
Соединение осей.
Фиксаторы.
Соединение осей.
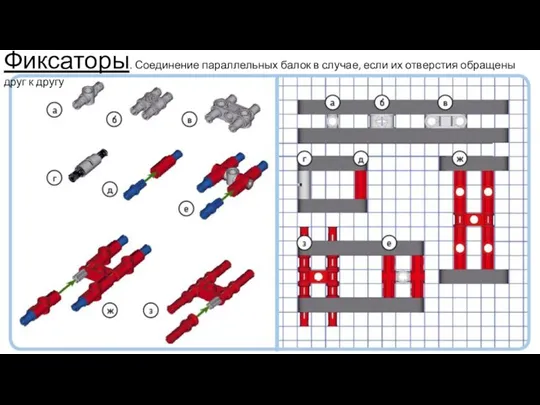
Фиксаторы. Соединение параллельных балок в случае, если их отверстия обращены друг к другу
Фиксаторы. Соединение параллельных балок в случае, если их отверстия обращены друг к другу
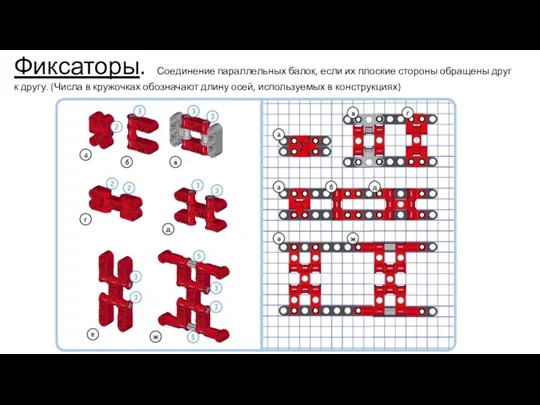
Фиксаторы. Соединение параллельных балок, если их плоские стороны обращены друг к другу.
Фиксаторы. Соединение параллельных балок, если их плоские стороны обращены друг к другу.
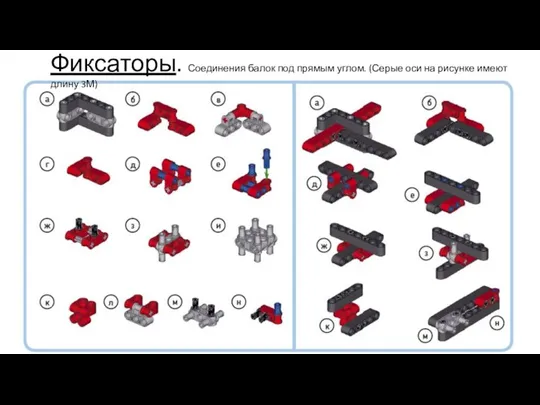
Фиксаторы. Соединения балок под прямым углом. (Серые оси на рисунке имеют
Фиксаторы. Соединения балок под прямым углом. (Серые оси на рисунке имеют
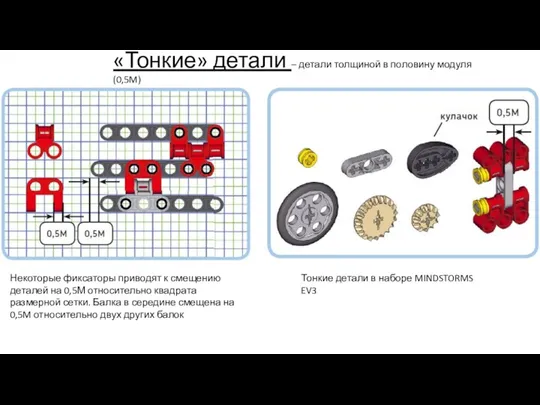
Некоторые фиксаторы приводят к смещению деталей на 0,5М относительно квадрата размерной сетки.
Некоторые фиксаторы приводят к смещению деталей на 0,5М относительно квадрата размерной сетки.
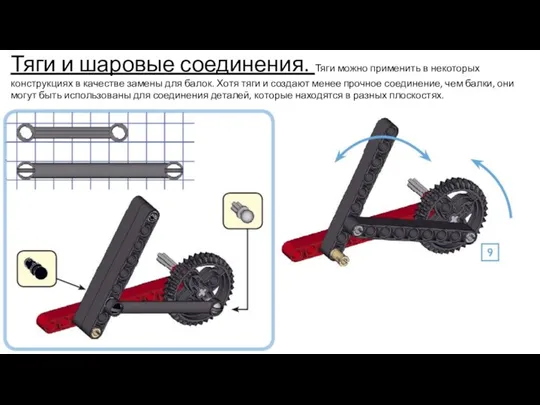
Тяги и шаровые соединения. Тяги можно применить в некоторых конструкциях в качестве замены
Тяги и шаровые соединения. Тяги можно применить в некоторых конструкциях в качестве замены
Конструкции с
моторами,
колесами и
гусеницами
Конструкции с
моторами,
колесами и
гусеницами

Основные компоненты робота
Сервомоторы
Мышцы человека
Основные компоненты робота
Сервомоторы
Мышцы человека
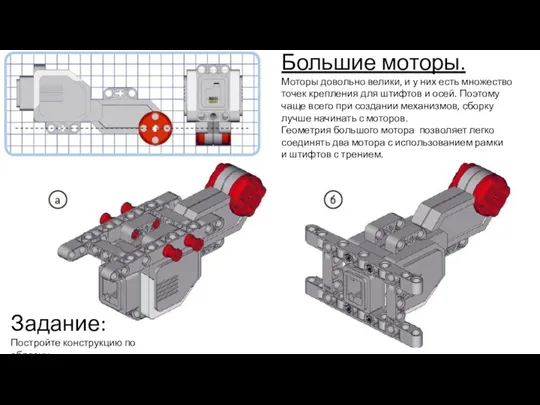
Большие моторы.
Моторы довольно велики, и у них есть множество точек крепления для
Большие моторы.
Моторы довольно велики, и у них есть множество точек крепления для
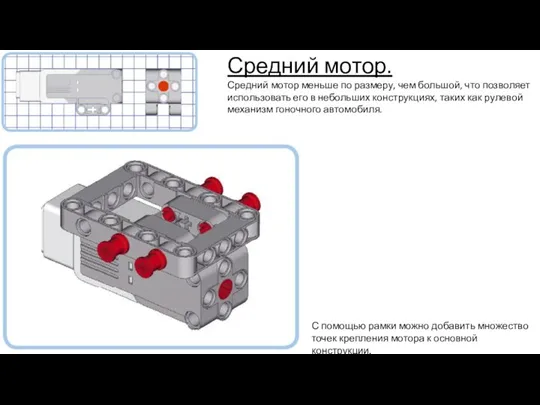
Средний мотор.
Средний мотор меньше по размеру, чем большой, что позволяет использовать
Средний мотор.
Средний мотор меньше по размеру, чем большой, что позволяет использовать
Двигатели (моторы)
И
Движители
Двигатели (моторы)
И
Движители

Дви́житель — устройство, преобразующее энергию двигателя либо внешнего источника, через взаимодействие со средой, в
Дви́житель — устройство, преобразующее энергию двигателя либо внешнего источника, через взаимодействие со средой, в
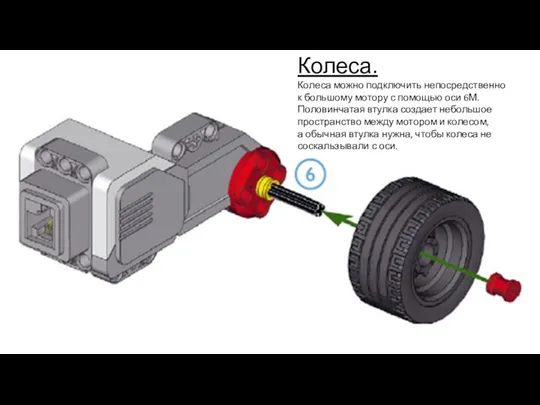
Колеса.
Колеса можно подключить непосредственно к большому мотору с помощью оси 6М. Половинчатая втулка
Колеса.
Колеса можно подключить непосредственно к большому мотору с помощью оси 6М. Половинчатая втулка
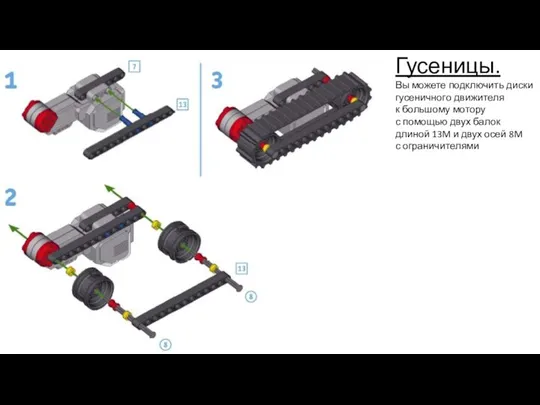
Гусеницы.
Вы можете подключить диски гусеничного движителя к большому мотору с помощью двух балок
Гусеницы.
Вы можете подключить диски гусеничного движителя к большому мотору с помощью двух балок
Механическая
передача
Как передать силу двигателя к движителю? (Например от автомобильного мотора к
Механическая
передача
Как передать силу двигателя к движителю? (Например от автомобильного мотора к
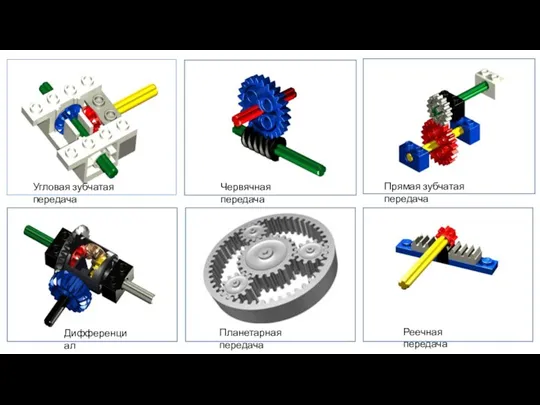
Угловая зубчатая передача
Дифференциал
Планетарная передача
Реечная передача
Прямая зубчатая передача
Червячная передача
Угловая зубчатая передача
Дифференциал
Планетарная передача
Реечная передача
Прямая зубчатая передача
Червячная передача

Цепная передача
Кривошипно-шатунный механизм
(каленвал)
Ременная передача
Цепная передача
Кривошипно-шатунный механизм
(каленвал)
Ременная передача

Конструирование с
зубчатыми колесами
Конструирование с
зубчатыми колесами
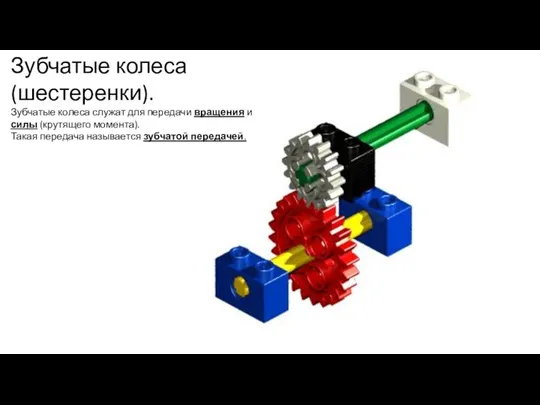
Зубчатые колеса (шестеренки).
Зубчатые колеса служат для передачи вращения и силы (крутящего
Зубчатые колеса (шестеренки).
Зубчатые колеса служат для передачи вращения и силы (крутящего

С помощью зубчатой передачи можно менять:
Скорость вращения
Силу (крутящий момент)
Равная передача: не
Скорость вращения
Силу (крутящий момент)
Равная передача: не
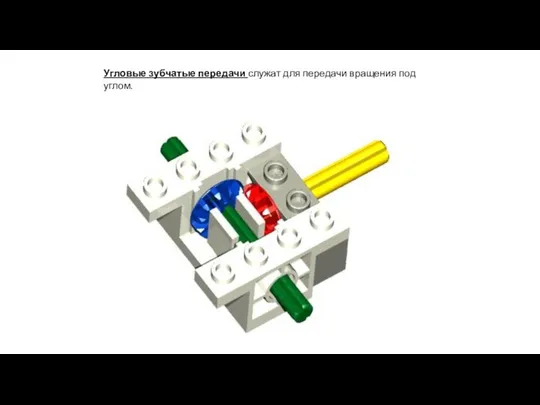
Угловые зубчатые передачи служат для передачи вращения под углом.
Угловые зубчатые передачи служат для передачи вращения под углом.


Кноб-колеса.
Используйте кноб-колеса для передачи движения с параллельными осями (вверху) и с перпендикулярными (внизу)
Кноб-колеса.
Используйте кноб-колеса для передачи движения с параллельными осями (вверху) и с перпендикулярными (внизу)
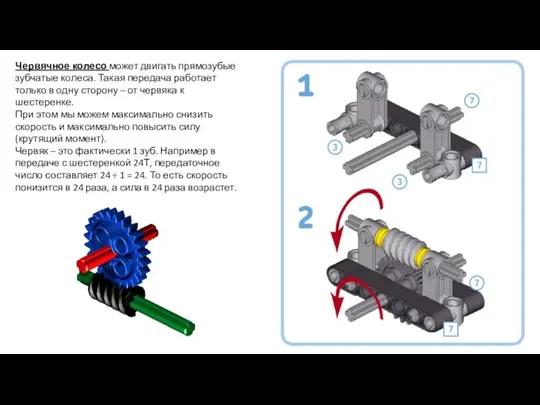
Червячное колесо может двигать прямозубые зубчатые колеса. Такая передача работает только
Червячное колесо может двигать прямозубые зубчатые колеса. Такая передача работает только
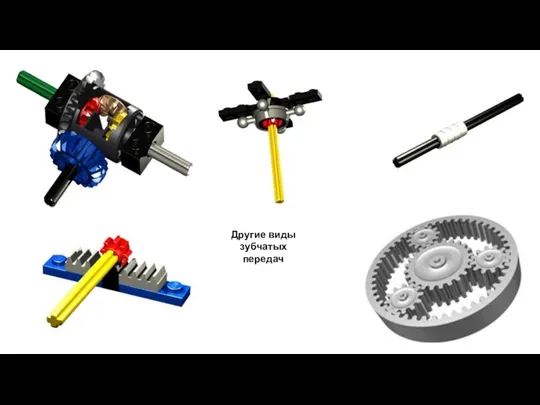
Другие виды зубчатых передач
Другие виды зубчатых передач
Конструкции с
датчиками
Конструкции с
датчиками

Каждый датчик имеет точки крепления для одной оси и двух штифтов. Кроме
Каждый датчик имеет точки крепления для одной оси и двух штифтов. Кроме

Датчик касания
Датчик касания

Датчик касания
Тактильные ощущения
Датчик касания
Датчик касания
Тактильные ощущения
Датчик касания
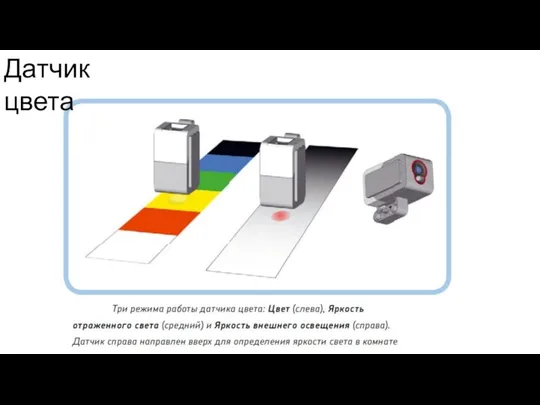
Датчик цвета
Датчик цвета

Ультразвуковой датчик расстояния
Ультразвуковой датчик расстояния

ИК-датчик позволяет роботу «видеть» окрестности путем измерения приблизительного расстояния до объекта
ИК-датчик позволяет роботу «видеть» окрестности путем измерения приблизительного расстояния до объекта

-Датчик цвета
Ультразвуковой датчик
Инфракрасный датчик
Глаза
-Датчик цвета
Ультразвуковой датчик
Инфракрасный датчик
Глаза

Гироскоп
7
Чувство баланса
Гироскопический датчик
Гироскоп
7
Чувство баланса
Гироскопический датчик
Модуль EV3
Модуль EV3

Контроллер EV3 - ум и сердце вашего робота. Обеспечивает управление и
Контроллер EV3 - ум и сердце вашего робота. Обеспечивает управление и

Порты подключения
Порты 1, 2, 3 и 4
используются
для подключения
датчиков к контроллеру EV3.
Порты
Порты подключения
Порты 1, 2, 3 и 4
используются
для подключения
датчиков к контроллеру EV3.
Порты

Кнопки блока
1
3
2
3
3
3
Возврат
Отменить
Остановить программу
Отключить робота
1
2
Центральная кнопка
Выбрать
Запустить программу
Включить
3
Влево Вправо Вниз Вверх
Перемещение по меню
Кнопки блока
1
3
2
3
3
3
Возврат
Отменить
Остановить программу
Отключить робота
1
2
Центральная кнопка
Выбрать
Запустить программу
Включить
3
Влево Вправо Вниз Вверх
Перемещение по меню

Способы
управления
роботом
Способы
управления
роботом
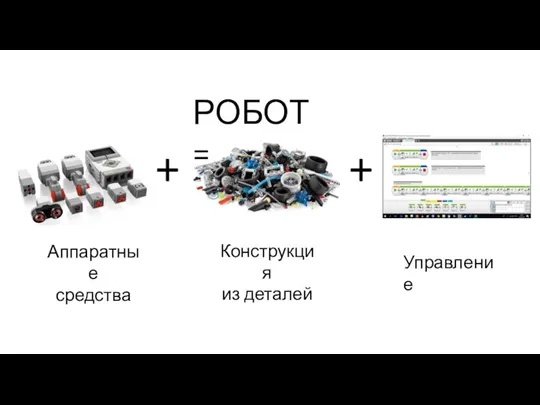
РОБОТ =
+
+
Аппаратные
средства
Конструкция
из деталей
Управление
РОБОТ =
+
+
Аппаратные
средства
Конструкция
из деталей
Управление

Способы управления роботом:
Программное управление
Программирование на компьютере
Программирование на модуле
Ручное управление
Пультом управления
Через приложения
Способы управления роботом:
Программное управление
Программирование на компьютере
Программирование на модуле
Ручное управление
Пультом управления
Через приложения
Среда программирования
Среда программирования

Среда
проектирования
Среда
проектирования
ЗАПУСК СРЕДЫ
ПРОГРАММИРОВАНИЯ
ЗАПУСК СРЕДЫ
ПРОГРАММИРОВАНИЯ
Запустите программу LEGO MINDSTORMS Education EV3
Запустите программу LEGO MINDSTORMS Education EV3
Включение блока EV3
Для включения блока EV3 нажмите центральную кнопку.
После нажатия кнопки
Включение блока EV3
Для включения блока EV3 нажмите центральную кнопку.
После нажатия кнопки
Каждый модуль имеет свое уникальное имя (номер). Подключите ваш модуль к
Каждый модуль имеет свое уникальное имя (номер). Подключите ваш модуль к
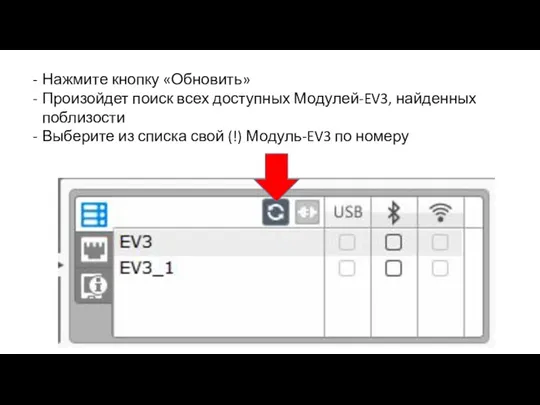
Нажмите кнопку «Обновить»
Произойдет поиск всех доступных Модулей-EV3, найденных поблизости
Выберите из списка
Нажмите кнопку «Обновить»
Произойдет поиск всех доступных Модулей-EV3, найденных поблизости
Выберите из списка
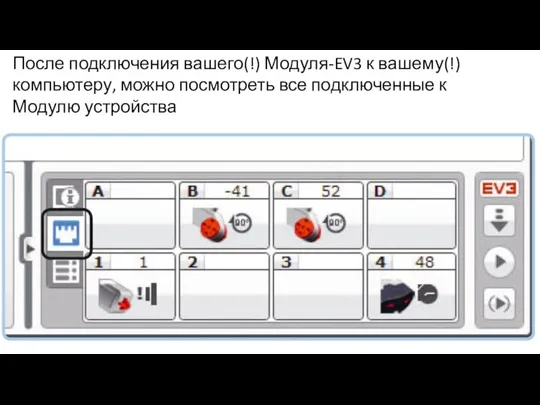
После подключения вашего(!) Модуля-EV3 к вашему(!) компьютеру, можно посмотреть все подключенные
После подключения вашего(!) Модуля-EV3 к вашему(!) компьютеру, можно посмотреть все подключенные
 Презентация Сюжетно-ролевая игра в развитии старших дошкольников
Презентация Сюжетно-ролевая игра в развитии старших дошкольников Теория строение органических соединений
Теория строение органических соединений Приложение 1 к уроку по теме Озёра. Презентация. часть1
Приложение 1 к уроку по теме Озёра. Презентация. часть1 Древние образы в народном искусстве. 5 класс
Древние образы в народном искусстве. 5 класс Сталинградская битва.
Сталинградская битва. Материки и океаны
Материки и океаны Черная металлургия. Производство чугуна и стали. 9 класс
Черная металлургия. Производство чугуна и стали. 9 класс Қатты отындарды газдендіру
Қатты отындарды газдендіру Выявлекние и устранение типовых неисправностей блоков питания
Выявлекние и устранение типовых неисправностей блоков питания Теория к заданию № 16 (ЕГЭ по русскому языку. Версия 2019 года)
Теория к заданию № 16 (ЕГЭ по русскому языку. Версия 2019 года) Самостоятельная двигательная активность детей на прогулке, руководство ею
Самостоятельная двигательная активность детей на прогулке, руководство ею Презентация выступления на педсовете по теме Выявление трудных детей
Презентация выступления на педсовете по теме Выявление трудных детей Родительское собрание Роль книги в развитии интеллектуальных умений ребёнка (Конспект с презентацией)
Родительское собрание Роль книги в развитии интеллектуальных умений ребёнка (Конспект с презентацией) Классный час Я и другие люди. Вежливость.
Классный час Я и другие люди. Вежливость. класс
класс Развертка пирамиды
Развертка пирамиды Общие пути катаболизма. Энергетический обмен
Общие пути катаболизма. Энергетический обмен Презентация к уроку библиотечно-информационной грамотности по теме Структура книги
Презентация к уроку библиотечно-информационной грамотности по теме Структура книги Внеурочная деятельность (кружки)
Внеурочная деятельность (кружки) Деловая игра, как способ развития социальной компетентности у учащихся на уроках географии
Деловая игра, как способ развития социальной компетентности у учащихся на уроках географии Артикуляционная гимнастика для малышей
Артикуляционная гимнастика для малышей Раннее Новое время: от средневекового общества к обществу индустриальному
Раннее Новое время: от средневекового общества к обществу индустриальному Получение негативного изображения
Получение негативного изображения Пеларгония зональная красная
Пеларгония зональная красная Здоровьесберегающие технологии в начальной школе.
Здоровьесберегающие технологии в начальной школе. Презентация Природные зоны Северной Америки
Презентация Природные зоны Северной Америки Органы цветковых растений. Корень
Органы цветковых растений. Корень Система ЦТ SECAM
Система ЦТ SECAM