- Образовательная робототехника в России и мире. Современный инструментарий

Содержание
- 2. Робот
- 3. Робот Karel Čapek – чещский писать, написавший пьесу R.U.R Ро́бот ( robot, от robota — подневольный
- 4. Роботы. Хронология 5-й век до н.э. Идея разумного робота была впервые упоминается в древнегреческих мифах. В
- 5. Роботы. Хронология 1968 г. Первое упоминание слово робот в научной статье появилось в статье В.А.Якубовича «Кибернетика
- 6. Роботы. Хронология Весной 1974 г. Студентом 5 курса Гусевым С.В. под руководством В.А. Якубович создан второй
- 7. Тенденции
- 8. Тенденции
- 9. Что сейчас? Boston Dynamics создала шагающего четырехного робота-собаку BigDog (полное название Legged Squad Support System (LS3)).
- 10. Что сейчас? PromoBot Назначение и цели создания системы: — Привлечение потока клиентов; — Автоматизация процесса консультации;
- 11. Что сейчас? ExoAtlet
- 12. Что сейчас? Boston Dynamics создала шагающего двуного робота Atlas. стереоскопические видеокамеры оптические датчики LIDAR рост около
- 13. Что сейчас?
- 14. Промышленные роботы Решения для прототипирования Робототехнические конструкторы Категории роботов
- 15. Робототехнические конструкторы Tetrix ARDrone BIOLOID Vex Vex IQ Vex PRO LEGO Mindstorm RCX, NXT, EV3 Fischertechnik
- 16. Решения для прототипирования Arduino Rasberry Pi UDOO (UDOO Neo) REX
- 17. Решения для прототипирования
- 18. Промышленные решения • ABB • KUKA • National Instruments • dSpace
- 19. Новое решение
- 20. Контроллер ТРИК Двухъядерный процессор DSP-ядро для обработка аудио\видео real-time Подключение 4 силовых и 6 сервомоторов Подключение
- 21. Контроллер ТРИК SoC OMAP L-138 375 MHz Cristal 15-25 MHz DDR MT46V32M16P 64 MB 400 MHz
- 22. TRIK Studio визуальная среда программирования
- 23. Генерация на гибридном языке ДРАКОН-Си. Дружелюбный русский алгоритмический язык, который обеспечивает наглядность ДРАКОН
- 24. Программирование контроллера ТРИК JavaScript широкие возможности программирования
- 25. Почему JavaScript?
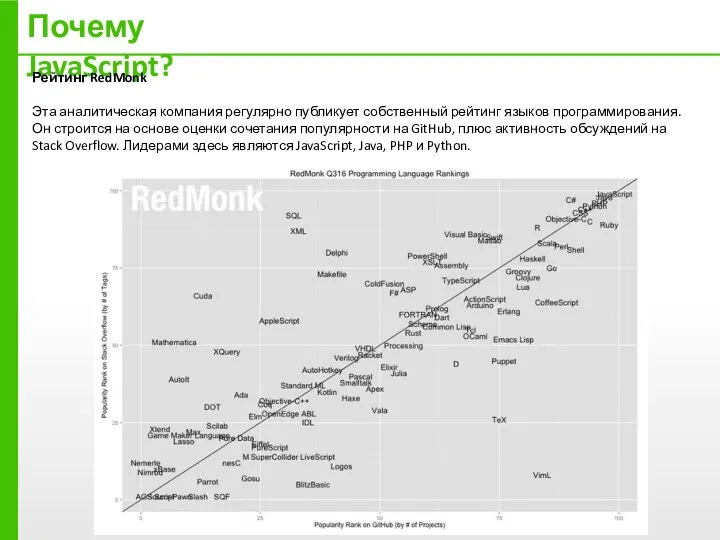
- 26. Почему JavaScript? Рейтинг RedMonk Эта аналитическая компания регулярно публикует собственный рейтинг языков программирования. Он строится на
- 27. Почему JavaScript? IEEE Spectrum — это журнал, который издается Институтом инженеров электротехники и электроники (IEEE).
- 28. Конструктор ТРИК
- 29. Курс первого года ТРИК презентации к урокам bit.ly/TRIK_presentations «Первый шаг в робототехнику (демо-курс)» - онлайн курс
- 30. РобоФест, Москва (Екатеринбург) RoboScience, Томск Робофинист, Санкт-Петербург Робокросс, Нижний Новгород Всероссийская робототехническая олимпиада, Казань Робототехнические соревнования
- 31. RoboCup Challenge Мировые робототехнические соревнования Eurobot Robot Challenge World Robot Olympiad First Tech Challenge Darpa Challenge
- 32. Виды соревнования Олимпиада по робототехнике (старшая категория) Линия-профи Эстафета Роботраффик Кубок ЦНИИ РТК Робофутбол Большое путешествие
- 33. Робофутбол
- 34. Робофутбол
- 35. Робофутбол
- 36. Робофутбол
- 37. Что такое робофутбол? Спортивные соревнования Инструмент исследования Образовательный инструмент
- 38. RoboCup – Robot Soccer World Cup (University of British Columbia, Canada) “On Seeing Robots” VI-92, 1992
- 39. RoboCup – Robot Soccer World Cup By mid-21st century, a team of fully autonomous humanoid robot
- 40. 35 000 участников и посетителей 3 500 участников отборочных туров из 45 стран 1 200 роботов
- 41. А что же в России и СНГ? В 2004 году команда из Политеха СПб заняла 1
- 42. Открытый Российский этап чемпионата RoboCup Russia Open 2016 Дата: 12-13 мая 2016 Город: Томск Место: Дворец
- 43. Кибернетический конструктор ТРИК Мощный исследовательский инструмент Обучение конструированию Обучение программированию Обучение математике Развитие творческого научно-технического мышления
- 45. Скачать презентацию
Робот
Робот
Робот
Karel Čapek – чещский писать, написавший пьесу R.U.R
Ро́бот ( robot, от robota — подневольный труд
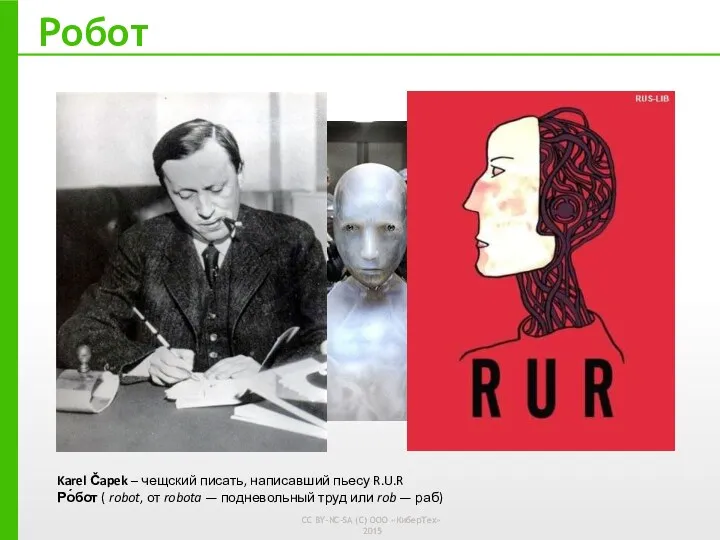
Робот
Karel Čapek – чещский писать, написавший пьесу R.U.R Ро́бот ( robot, от robota — подневольный труд
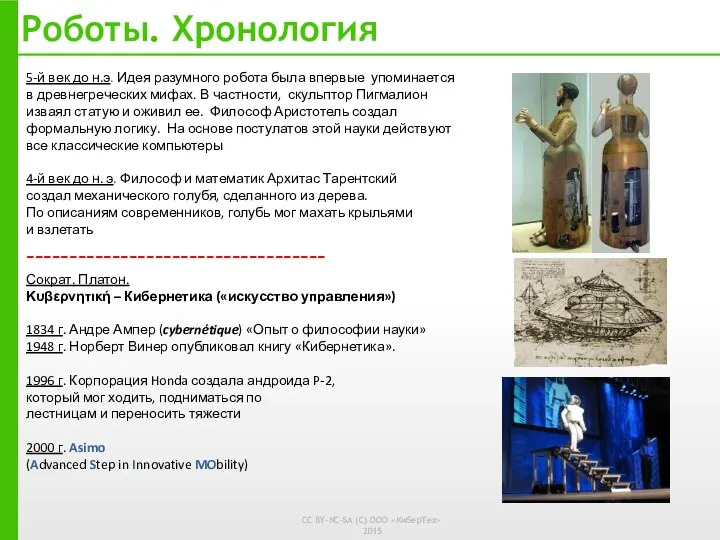
Роботы. Хронология
5-й век до н.э. Идея разумного робота была впервые упоминается
в
Роботы. Хронология
5-й век до н.э. Идея разумного робота была впервые упоминается
в
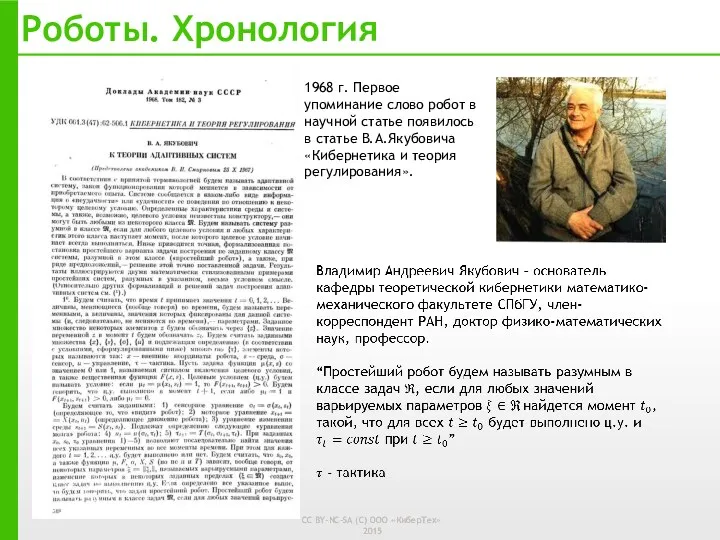
Роботы. Хронология
1968 г. Первое упоминание слово робот в научной статье появилось
Роботы. Хронология
1968 г. Первое упоминание слово робот в научной статье появилось

Роботы. Хронология
Весной 1974 г. Студентом 5 курса Гусевым С.В. под руководством
Роботы. Хронология
Весной 1974 г. Студентом 5 курса Гусевым С.В. под руководством
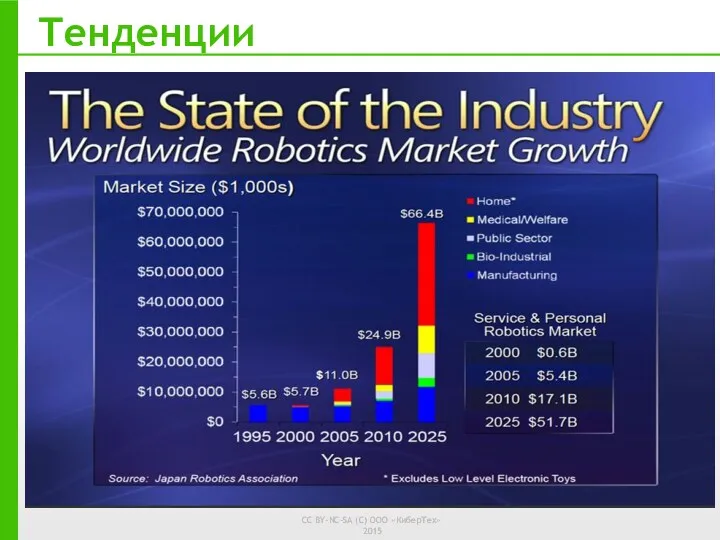
Тенденции
Тенденции
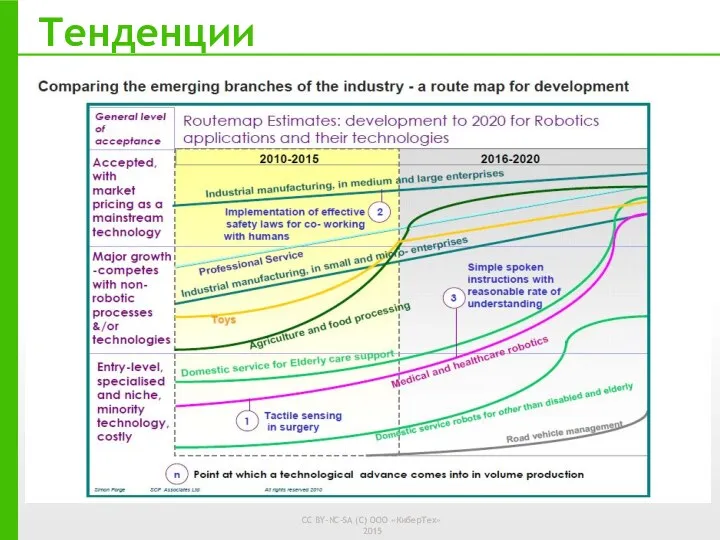
Тенденции
Тенденции

Что сейчас?
Boston Dynamics создала шагающего четырехного робота-собаку BigDog (полное название Legged
Что сейчас?
Boston Dynamics создала шагающего четырехного робота-собаку BigDog (полное название Legged

Что сейчас?
PromoBot
Назначение и цели создания системы:
— Привлечение потока клиентов;
— Автоматизация процесса
Что сейчас?
PromoBot
Назначение и цели создания системы: — Привлечение потока клиентов; — Автоматизация процесса

Что сейчас?
ExoAtlet
Что сейчас?
ExoAtlet

Что сейчас?
Boston Dynamics создала шагающего двуного робота Atlas.
стереоскопические видеокамеры
оптические датчики
Что сейчас?
Boston Dynamics создала шагающего двуного робота Atlas.
стереоскопические видеокамеры
оптические датчики

Что сейчас?
Что сейчас?
Промышленные роботы
Решения для прототипирования
Робототехнические конструкторы
Категории роботов
Промышленные роботы
Решения для прототипирования
Робототехнические конструкторы
Категории роботов

Робототехнические конструкторы
Tetrix
ARDrone
BIOLOID
Vex
Vex IQ
Vex PRO
LEGO
Mindstorm RCX, NXT, EV3
Fischertechnik
Робототехнические конструкторы
Tetrix
ARDrone
BIOLOID
Vex
Vex IQ
Vex PRO
LEGO
Mindstorm RCX, NXT, EV3
Fischertechnik

Решения для прототипирования
Arduino
Rasberry Pi
UDOO (UDOO Neo)
REX
Решения для прототипирования
Arduino
Rasberry Pi
UDOO (UDOO Neo)
REX

Решения для прототипирования
Решения для прототипирования
Промышленные решения
• ABB
• KUKA
• National Instruments
• dSpace
Промышленные решения
• ABB
• KUKA
• National Instruments
• dSpace

Новое решение
Новое решение

Контроллер ТРИК
Двухъядерный процессор
DSP-ядро для обработка аудио\видео real-time
Подключение 4 силовых и 6
Контроллер ТРИК
Двухъядерный процессор
DSP-ядро для обработка аудио\видео real-time
Подключение 4 силовых и 6
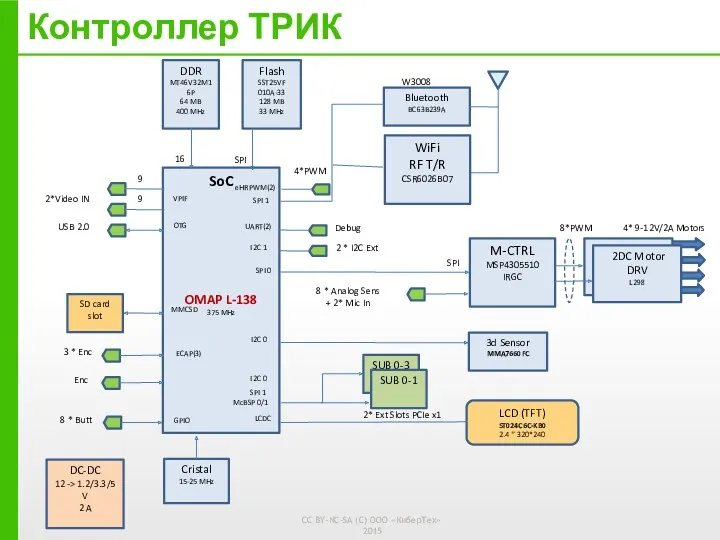
Контроллер ТРИК
SoC
OMAP L-138
375 MHz
Cristal
15-25 MHz
DDR
MT46V32M16P
64 MB
400 MHz
16
Flash
SST25VF
010A-33
128 MB
33 MHz
DC-DC
12 -> 1.2/3.3/5
Контроллер ТРИК
SoC
OMAP L-138
375 MHz
Cristal
15-25 MHz
DDR
MT46V32M16P
64 MB
400 MHz
16
Flash
SST25VF
010A-33
128 MB
33 MHz
DC-DC
12 -> 1.2/3.3/5
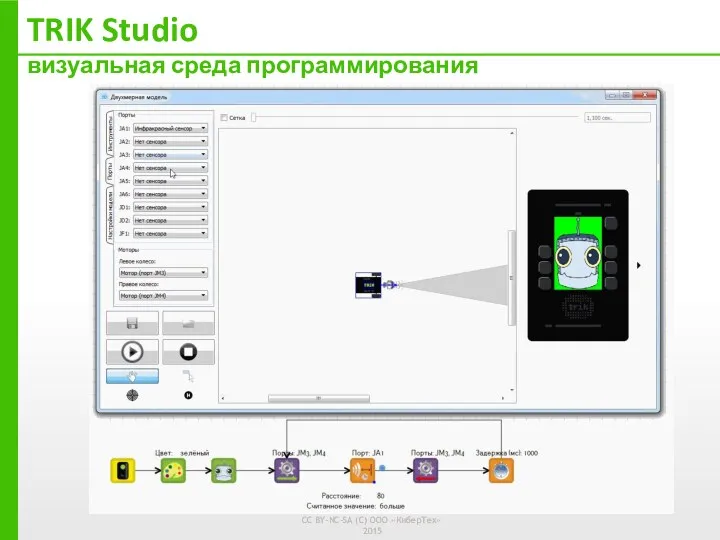
TRIK Studio
визуальная среда программирования
TRIK Studio
визуальная среда программирования
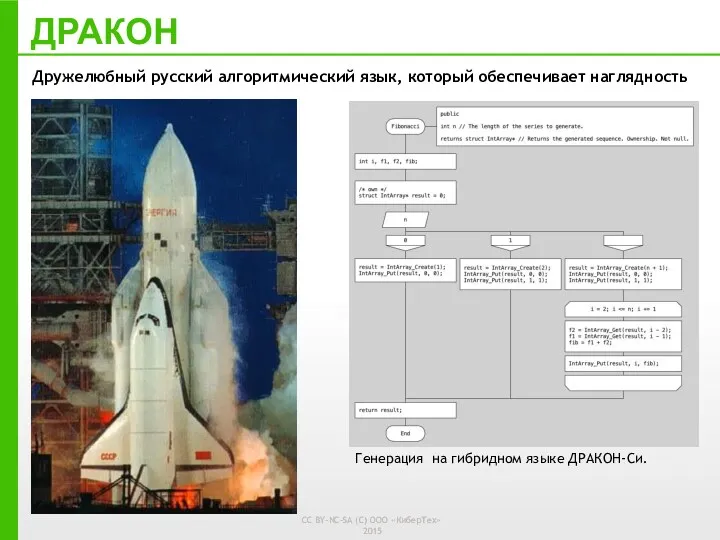
Генерация на гибридном языке ДРАКОН-Си.
Дружелюбный русский алгоритмический язык, который обеспечивает наглядность
ДРАКОН
Генерация на гибридном языке ДРАКОН-Си.
Дружелюбный русский алгоритмический язык, который обеспечивает наглядность
ДРАКОН
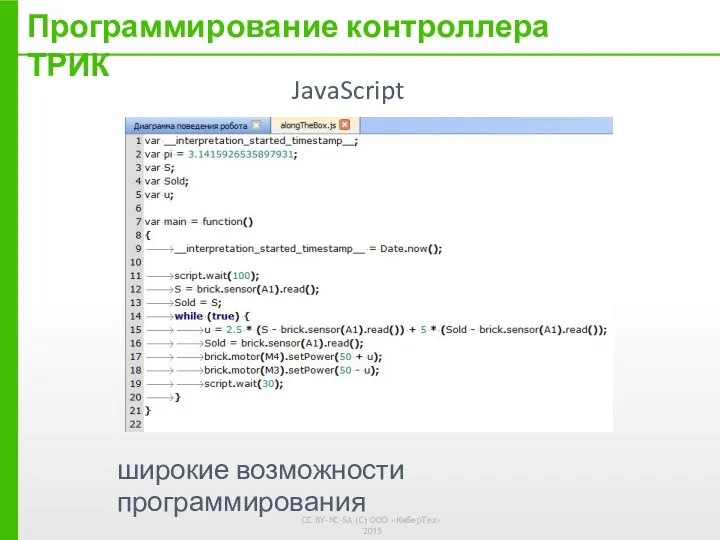
Программирование контроллера ТРИК
JavaScript
широкие возможности программирования
Программирование контроллера ТРИК
JavaScript
широкие возможности программирования

Почему JavaScript?
Почему JavaScript?
Почему JavaScript?
Рейтинг RedMonk
Эта аналитическая компания регулярно публикует собственный рейтинг языков программирования.
Почему JavaScript?
Рейтинг RedMonk
Эта аналитическая компания регулярно публикует собственный рейтинг языков программирования.

Почему JavaScript?
IEEE Spectrum — это журнал, который издается Институтом инженеров электротехники
Почему JavaScript?
IEEE Spectrum — это журнал, который издается Институтом инженеров электротехники

Конструктор ТРИК
Конструктор ТРИК
Курс первого года ТРИК
презентации к урокам bit.ly/TRIK_presentations
«Первый шаг в робототехнику (демо-курс)»
Курс первого года ТРИК
презентации к урокам bit.ly/TRIK_presentations
«Первый шаг в робототехнику (демо-курс)»

РобоФест, Москва (Екатеринбург)
RoboScience, Томск
Робофинист, Санкт-Петербург
Робокросс, Нижний Новгород
Всероссийская робототехническая олимпиада, Казань
Робототехнические соревнования
РобоФест, Москва (Екатеринбург)
RoboScience, Томск
Робофинист, Санкт-Петербург
Робокросс, Нижний Новгород
Всероссийская робототехническая олимпиада, Казань
Робототехнические соревнования

RoboCup Challenge
Мировые робототехнические соревнования
Eurobot
Robot Challenge
World Robot Olympiad
First Tech Challenge
Darpa Challenge
RoboCup Challenge
Мировые робототехнические соревнования
Eurobot
Robot Challenge
World Robot Olympiad
First Tech Challenge
Darpa Challenge
Виды соревнования
Олимпиада по робототехнике (старшая категория)
Линия-профи
Эстафета
Роботраффик
Кубок
Виды соревнования
Олимпиада по робототехнике (старшая категория)
Линия-профи
Эстафета
Роботраффик
Кубок

Робофутбол
Робофутбол

Робофутбол
Робофутбол

Робофутбол
Робофутбол

Робофутбол
Робофутбол

Что такое робофутбол?
Спортивные соревнования
Инструмент исследования
Образовательный инструмент
Что такое робофутбол?
Спортивные соревнования
Инструмент исследования
Образовательный инструмент
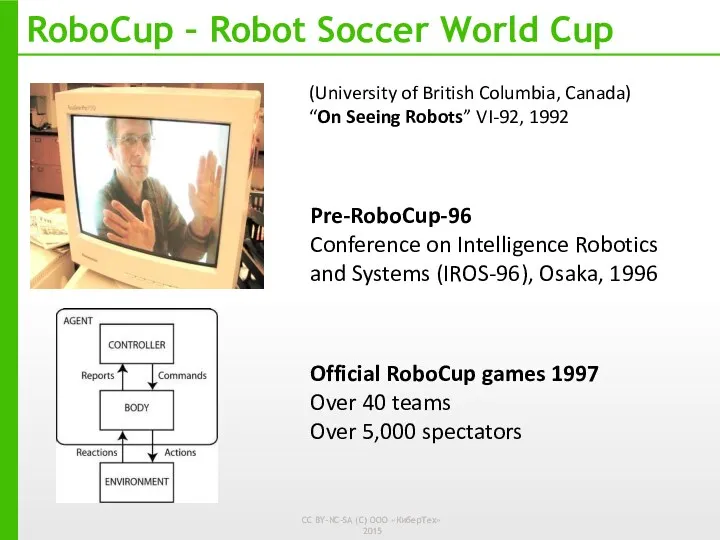
RoboCup – Robot Soccer World Cup
(University of British Columbia, Canada)
“On Seeing
RoboCup – Robot Soccer World Cup
(University of British Columbia, Canada)
“On Seeing
RoboCup – Robot Soccer World Cup
By mid-21st century, a team of
RoboCup – Robot Soccer World Cup
By mid-21st century, a team of

35 000 участников и посетителей
3 500 участников отборочных туров из 45
35 000 участников и посетителей
3 500 участников отборочных туров из 45

А что же в России и СНГ?
В 2004 году команда из
А что же в России и СНГ?
В 2004 году команда из
Открытый Российский этап чемпионата
RoboCup Russia Open 2016
Дата: 12-13 мая 2016
Город:
Открытый Российский этап чемпионата
RoboCup Russia Open 2016
Дата: 12-13 мая 2016
Город:
Кибернетический конструктор ТРИК
Мощный исследовательский инструмент
Обучение конструированию
Обучение программированию
Обучение математике
Развитие творческого научно-технического мышления
Кибернетический конструктор ТРИК
Мощный исследовательский инструмент
Обучение конструированию
Обучение программированию
Обучение математике
Развитие творческого научно-технического мышления
 Древесина. Материалы на основе древесины
Древесина. Материалы на основе древесины ГПА-16М-09 Урал
ГПА-16М-09 Урал ОГЭ. Геометрия на клетчатой бумаге. Площадь
ОГЭ. Геометрия на клетчатой бумаге. Площадь Monitorizarea calitatii. Energiei electrice
Monitorizarea calitatii. Energiei electrice Христианство. Основные идеи
Христианство. Основные идеи Презентация IT чемпион
Презентация IT чемпион Правила поведения в школе для первоклассников
Правила поведения в школе для первоклассников Социальная структура Древней Индии
Социальная структура Древней Индии Конструкция и сравнительный анализ основных опор шасси самолетов А-320, RRJ-95
Конструкция и сравнительный анализ основных опор шасси самолетов А-320, RRJ-95 Дом мечты из бумаги
Дом мечты из бумаги битва под Москвой презентация
битва под Москвой презентация Проблема общественного прогресса
Проблема общественного прогресса ДОКЛАД О ДЕЯТЕЛЬНОСТИ ГДОУ №35. Часть3
ДОКЛАД О ДЕЯТЕЛЬНОСТИ ГДОУ №35. Часть3 Презентация Воспитание культуры общения старшеклассников во внеурочное время
Презентация Воспитание культуры общения старшеклассников во внеурочное время Релігія та культура Давньої Індії
Релігія та культура Давньої Індії Экономическая политика и экономика России в конце XIX в
Экономическая политика и экономика России в конце XIX в Артикуляционная гимнастика в стихах. Свистящие звуки
Артикуляционная гимнастика в стихах. Свистящие звуки Внеклассное чтение 10 - 12 лет
Внеклассное чтение 10 - 12 лет Диагностическое обследование детей по теме Народное декоративно-прикладное искусство (компьютерные тесты для детей)
Диагностическое обследование детей по теме Народное декоративно-прикладное искусство (компьютерные тесты для детей) Техническое обслуживание и ремонт на участке по ремонту тормозной системы автомобилей ГАЗ-3307 на автотранспортном предприятии
Техническое обслуживание и ремонт на участке по ремонту тормозной системы автомобилей ГАЗ-3307 на автотранспортном предприятии Презентация Герои мифов в скульптуре
Презентация Герои мифов в скульптуре Акция Добрые дела осенью
Акция Добрые дела осенью Оформление территории Сказка на участке
Оформление территории Сказка на участке Джонатан Свифт Путешествие Гулливера
Джонатан Свифт Путешествие Гулливера Духовно-нравственное воспитание младших школьников в рамках школьной программы внеурочной деятельности
Духовно-нравственное воспитание младших школьников в рамках школьной программы внеурочной деятельности Особенности психологической подготовки учащихся к ЕГЭ
Особенности психологической подготовки учащихся к ЕГЭ Очиститель воздуха
Очиститель воздуха Бизнес-план. Организация переработки молока
Бизнес-план. Организация переработки молока