- Оперативная память для MS-DOS. ААС 10

Содержание
- 2. Оперативная память для MS-DOS
- 3. Оперативная память для MS-DOS Для операционных систем реального режима (MS-DOS) оперативная память может размещаться в стандартной
- 4. Оперативная память для MS-DOS Дополнительная память и UMA могут использоваться в качестве оперативной только со специальными
- 5. Для поддержки EMS поначалу требовались специальные аппаратные средства. В компьютерах на процессорах 386 и выше появилась
- 6. Система EMS в основном предназначена для хранения данных — для исполняемого в данный момент программного кода
- 7. Спецификация на расширенную память (extended Memory Specification, XMS) — это иная программная спецификация на использование дополнительной
- 8. Виртуальная память
- 9. Виртуальная память Виртуальная память (virtual memory) представляет собой программно-аппаратное средство расширения пространства памяти, предоставляемой программе в
- 10. Обращение процессора к ячейке виртуальной памяти, присутствующей в физической памяти, происходит обычным способом. Если же затребованная
- 11. Суммарный объем виртуальной памяти, доступной всем приложениям, определяется объемом ОЗУ и файлов подкачки (их может быть
- 12. Пространство ввода-вывода
- 13. Пространство ввода-вывода Процессоры семейства х86 имеют раздельную адресацию памяти и портов ввода-вывода. Это разделение обеспечивается выделением
- 14. В инструкциях ввода-вывода используется 16-битная адресация, что обуславливает размер пространства ввода-вывода в 64 кбайт. Для дешифрации
- 15. Каждой шине назначается своя область адресов ввода. Дешифратор адресов, расположенный на системной плате, при чтении открывает
- 16. Для современных плат со встроенной периферией и несколькими шинами (ISA, PCI) распределением адресов управляет BIOS через
- 17. Аппаратные прерывания
- 18. Аппаратные прерывания Аппаратные прерывания обеспечивают реакцию процессора на события, происходящие асинхронно по отношению к исполняемому программному
- 19. Процедура должна выполнить действия по обслуживанию данного устройства, включая сброс его запроса, и отправить команду завершения
- 20. Немаскируемые прерывания
- 21. Немаскируемые прерывания (Non-Maskable Interrupt, NMI) в РС используются для сигнализации о фатальных аппаратных ошибках. На немаскируемое
- 22. Источниками прерывания SMI являются схемы чипсета, участвующие в управлении энергопотреблением, а также контроллер USB при эмуляции
- 23. Возможность рестарта инструкции ввода-вывода используют, например, когда прикладная программа (или системный драйвер) пытается обратиться операцией ввода-вывода
- 24. Маскируемые прерывания
- 25. Маскируемые прерывания Маскируемые прерывания используются для сигнализации о событиях в устройствах. Реакция процессора на маскируемые прерывания
- 26. Периферийный контроллер прерываний (Peripheral Interrupt Controller, PIC) программно совместим с традиционным контроллером 8259А, использовавшимся еще в
- 27. Усовершенствованный периферийный контроллер прерываний (Advanced Pe-ripheral Interrupt Controller, APIC) введен в компьютеры для поддержки мультипроцессорных систем
- 28. Компьютер, оснащённый контроллером APIC, обязательно имеет возможность функционировать и в режиме, совместимом со стандартной связкой пары
- 29. На входы контроллеров прерываний поступают запросы от стандартных устройств (клавиатура, системный таймер, CMOS-таймер, сопроцессор), периферийных контроллеров
- 30. Каждому устройству, для поддержки работы которого требуются прерывания, должен быть назначен свой номер прерывания. Назначения номеров
- 31. В процессе назначения прерываний может участвовать система PnP для шин ISA и PCI; для распределения линий
- 32. Традиционный контроллер прерываний - PIC
- 33. Традиционный контроллер прерываний - PIC Контроллер прерываний (PIC) 8259А является периферийным устройством, которое связано с процессором
- 34. Каждый вход может быть программно замаскирован — тогда он не вызывает сигнал общего запроса. Контроллер занимает
- 35. С каждым входом запроса в контроллере связано по одному биту в регистрах IRR, IMR и ISR;
- 36. Контроллер прерываний позволяет программировать свои входы на чувствительность к уровню или перепаду сигнала. Чувствительность к уровню
- 37. В любом случае сигнал запроса аппаратного прерывания IRQx должен удерживаться генерирующей его схемой, по крайней мере,
- 38. Если к этому моменту запрос окажется снятым, источник прерывания корректно идентифицирован не будет, и контроллер сообщит
- 39. Один контроллер PIC 8259А позволяет обслуживать 8 запросов прерываний; в PC/AT применяется каскадное соединение двух контроллеров,
- 40. В IBM PC/XT/AT используется специальный режим вложенных прерываний с фиксированным приоритетом и автоматическим неспецифическим завершением. После
- 41. Для подключения обработчика прерывания от устройства первым делом следует загрузить обработчик в память и установить указатель
- 42. В современных системных платах функции контроллеров прерываний возлагаются на чипсет, который может иметь и более гибкие
- 43. Однако в операционном режиме всегда сохраняется программная совместимость с 8259А. При работе с контроллером прерываний от
- 44. Улучшенный контроллер прерываний -APIC
- 45. Улучшенный контроллер прерываний -APIC Контроллер APIC в первую очередь предназначен для симметричных мультипроцессорных систем (2, 4
- 46. Все контроллеры APIC соединены между собой локальной шиной, по которой они обмениваются друг с другом сообщениями.
- 47. Контроллер прерываний от ввода-вывода (I/O APIC) преобразует запросы аппаратных прерываний от устройств в сообщения протокола локальной
- 49. Проблема разделяемых прерываний
- 50. Проблема разделяемых прерываний Линии запросов прерываний в компьютере, насыщенном периферийными устройствами, являются самым дефицитным ресурсом, поэтому
- 51. Если это, то обработчик должен выполнить необходимые действия и сбросить сигнал запроса прерывания от своего устройства,
- 52. В соответствии со схемотехникой логики ТТЛ и КМОП активным уровнем должен быть низкий; выходной формирователь сигнала
- 53. Поясним, почему надежная разделяемость при чувствительности к перепаду на линии запроса невозможна. Если устройство 1 выработает
- 54. Для шины PCI с аппаратной точки зрения проблема разделения прерываний решена — здесь активным уровнем запроса
- 55. После успешного решения аппаратной задачи обеспечения разделяемости линий запроса возникает задача идентификации источника каждого прерывания, что
- 56. Обработчики прерываний устройств должны вести себя корректно, учитывая возможность попадания в цепочку обработчиков разделяемого прерывания. Встречается
- 57. Прямой доступ к памяти - DMA
- 58. Прямой доступ к памяти (Direct Memory Access, DMA) - это обмен между системной памятью (ОЗУ) и
- 59. Для устройств шины PCI (и всех ее «родственников») контроллер является частью устройства — мастера шины (bus
- 60. Первоначально он использовался устройствами шины ISA Теперь он используется интегрированной традиционной периферией: контроллером НГМД, портами LPT
- 61. Аксессуары системной платы IBM РС
- 62. Системная плата первой модели РС содержала несколько функциональных узлов, которые благодаря открытому описанию приобрели надежный статус
- 63. Эти узлы перечислены далее: Схемы предоставления системных ресурсов — памяти, ввода-вывода, прерываний, прямого доступа к памяти.
- 64. Системный порт АТ, предназначенный для управления немаскируемыми прерываниями и звуком. Канал управления звуком (PC speaker) -
- 65. Системный таймер - 8253/8254
- 66. Системный таймер - 8253/8254 Во всех моделях РС используется трехканальный счетчик-таймер, выполняющий: - генерацию прерываний от
- 67. В качестве счетчиков-таймеров в XT применялась микросхема i8253, а в АТ — более быстродействующая i8254, которая
- 68. Внутренние счетчики микросхемы имеют разрядность 16 бит, но общение с ними возможно только 8-битными операциями. При
- 69. Канал управления звуком - PC speaker
- 70. Канал управления звуком - PC speaker Стандартный канал управления звуком PC speaker рассчитан на подключение высокоомного
- 71. Разрешая/запрещая формирование сигнала программно-управляемым битом 1 системного порта 61h, можно подавать сигналы определенной длительности. Такой способ
- 72. С учетом физиологии слуха (инерционности восприятия) быстрым переключением частот можно достигать эффекта псевдомногоголосия. Таймер генерирует выходной
- 73. Канал управления звуком Канал управления звуком - PC speaker
- 74. Более интересные звуки можно извлекать, используя принцип широтно-импульсной модуляции, программно осуществляемый через бит 1 порта 61h.
- 75. Процессоры, начиная с 80286, способны формировать такой поток управляющих сигналов, который позволяет воспроизводить музыкальный или речевой
- 76. Кроме того, качество воспроизведения в значительной степени зависит от частотных свойств динамика. Предпочтительнее более крупные динамики,
- 77. Для ранних версий Windows существует даже драйвер, обеспечивающий извлечение звука через эти незамысловатые аппаратные средства. Однако
- 78. Батарейная память и часы – CMOS Memory, RTC
- 79. Батарейная память и часы – CMOS Memory, RTC В АТ для хранения информации о конфигурации компьютера
- 80. Сначала содержимое этой памяти и дату модифицировали с помощью внешней загружаемой утилиты Setup, а позже эту
- 81. Таймер синхронизируется от собственного генератора с кварцевым резонатором, как правило, на 32,768 кГц. Таймерная часть содержит:
- 82. Микросхема CMOS RTC является источником аппаратного прерывания с номером 8. Прерывания могут возникать от будильника и
- 83. Поскольку эта память имеет быстродействие порядка единиц микросекунд, необходима программная задержка между командами записи адреса и
- 84. Для определения момента окончания смены состояния часов можно пользоваться и разрешением соответствующего источника прерывания. Для работы
- 85. Системная поддержка таймеров - Int 1Ah Int 15h BIOS
- 86. Сервисы Int 1Ah BIOS позволяют считывать и модифицировать значения системного таймера, даты и времени, а также
- 87. АН = 0 — чтение системного таймера (двойного слова по адресу 40:006Eh в области переменных BIOS),
- 88. АН = 1 — установка системного таймера (СХ — старшая часть, DX — младшая) и сброс
- 89. АН = 3 — установка времени в RTC (назначение регистров и признак результата аналогичны функции 2).
- 90. АН = 5 — установка даты в RTC (назначение регистров и признак результата аналогичны функции 4).
- 91. Функции Int 15h BIOS позволяют программировать таймер CMOS RTC — вводить задержку или запускать таймер установки
- 92. Системная поддержка таймеров - Int 1Ah Int 15h BIOS АН = 86h — задержка на заданное
- 93. Системная поддержка таймеров - Int 1Ah Int 15h BIOS АХ = 8300h — запуск таймера, устанавливающего
- 94. Распределение системных ресурсов
- 95. Распределение системных ресурсов Для того чтобы программы могли взаимодействовать со своими устройствами, не мешая другим (и
- 96. Для адресов памяти и портов ввода-вывода бесконфликтность означает, что диапазоны соответствующих адресов всех имеющихся устройств не
- 97. Если конфликтующие устройства находятся на разных шинах, то будет прочитаны данные только одного устройства, но какого
- 98. Информация при этом не искажается. Однако незапланированные конфликты по записи могут приводить к неожиданным побочным эффектам
- 99. Операции записи могут выполняться широковещательно — распространяться по всем шинам. Операции чтения маршрутизируются - фактически, чтение
- 100. Для линий запросов прерываний бесконфликтность трактуется несколько сложнее. В классической системе ISA одну линию запроса может
- 101. Аппаратные средства IBMРС. Гук М.Ю. Энциклопедия. З-е изд. — СПб.: Питер, 2006. Архитектура аппаратных средств. Конспект
- 102. https://i2.wp.com/laptopmedia.com/wp-content/uploads/2017/06/900269711f3c.jpg http://cart.softline.ru/pictures/products/16/35/05/99/af/f7/e1/63/ad/origin.jpeg https://i.ebayimg.com/00/s/Njc1WDkwMA==/z/tkwAAOSweW5VAd64/$_57.JPG?set_id=880000500F https://d.allegroimg.com/s1440/034db7/5bf73aa54f0ebb9f118bdae5d3ed http://900igr.net/up/datas/55384/033.jpg https://slide-share.ru/slide/4015074.jpeg http://www.venuscomputers.pk/wp-content/uploads/2014/10/TG-3468.jpg https://c-s.ru/uploads/29143/154716.jpg https://go3.imgsmail.ru/imgpreview?key=65253deb8ce2d91f&mb=storage https://i.ya-webdesign.com/images/pci-vector-slot.png https://i.ebayimg.com/00/s/OTAwWDE2MDA=/z/ATkAAOSwAWlajflo/$_57.JPG?set_id=8800005007 Список ссылок:
- 104. Скачать презентацию
Оперативная память для MS-DOS
Оперативная память для MS-DOS
Оперативная память для MS-DOS
Для операционных систем реального режима (MS-DOS) оперативная память
Оперативная память для MS-DOS
Для операционных систем реального режима (MS-DOS) оперативная память
Оперативная память для MS-DOS
Дополнительная память и UMA могут использоваться в качестве
Оперативная память для MS-DOS
Дополнительная память и UMA могут использоваться в качестве
Для поддержки EMS поначалу требовались специальные аппаратные средства. В компьютерах на
Система EMS в основном предназначена для хранения данных — для исполняемого
Система EMS в основном предназначена для хранения данных — для исполняемого
Спецификация на расширенную память (extended Memory Specification, XMS) — это иная
Спецификация на расширенную память (extended Memory Specification, XMS) — это иная
Виртуальная память
Виртуальная память
Виртуальная память
Виртуальная память (virtual memory) представляет собой программно-аппаратное средство расширения
Виртуальная память
Виртуальная память (virtual memory) представляет собой программно-аппаратное средство расширения
Обращение процессора к ячейке виртуальной памяти, присутствующей в физической памяти, происходит
Обращение процессора к ячейке виртуальной памяти, присутствующей в физической памяти, происходит
Суммарный объем виртуальной памяти, доступной всем приложениям, определяется объемом ОЗУ и
Суммарный объем виртуальной памяти, доступной всем приложениям, определяется объемом ОЗУ и
Пространство ввода-вывода
Пространство ввода-вывода
Пространство ввода-вывода
Процессоры семейства х86 имеют раздельную адресацию памяти и портов
Пространство ввода-вывода
Процессоры семейства х86 имеют раздельную адресацию памяти и портов
В инструкциях ввода-вывода используется 16-битная адресация, что обуславливает размер пространства ввода-вывода
В инструкциях ввода-вывода используется 16-битная адресация, что обуславливает размер пространства ввода-вывода
Каждой шине назначается своя область адресов ввода.
Дешифратор адресов, расположенный на системной
Каждой шине назначается своя область адресов ввода.
Дешифратор адресов, расположенный на системной
Для современных плат со встроенной периферией и несколькими шинами (ISA, PCI)
Для современных плат со встроенной периферией и несколькими шинами (ISA, PCI)
Аппаратные прерывания
Аппаратные прерывания
Аппаратные прерывания
Аппаратные прерывания обеспечивают реакцию процессора на события, происходящие асинхронно
Аппаратные прерывания
Аппаратные прерывания обеспечивают реакцию процессора на события, происходящие асинхронно
Процедура должна выполнить действия по обслуживанию данного устройства, включая сброс его
Процедура должна выполнить действия по обслуживанию данного устройства, включая сброс его
Немаскируемые прерывания
Немаскируемые прерывания
Немаскируемые прерывания (Non-Maskable Interrupt, NMI) в РС используются для сигнализации о
Немаскируемые прерывания (Non-Maskable Interrupt, NMI) в РС используются для сигнализации о
Источниками прерывания SMI являются схемы чипсета, участвующие в управлении энергопотреблением, а
Источниками прерывания SMI являются схемы чипсета, участвующие в управлении энергопотреблением, а
Возможность рестарта инструкции ввода-вывода используют, например, когда прикладная программа (или системный
Возможность рестарта инструкции ввода-вывода используют, например, когда прикладная программа (или системный
Маскируемые прерывания
Маскируемые прерывания
Маскируемые прерывания
Маскируемые прерывания используются для сигнализации о событиях в устройствах.
Маскируемые прерывания
Маскируемые прерывания используются для сигнализации о событиях в устройствах.
Периферийный контроллер прерываний (Peripheral Interrupt Controller, PIC) программно совместим с традиционным
Усовершенствованный периферийный контроллер прерываний (Advanced Pe-ripheral Interrupt Controller, APIC) введен в
Усовершенствованный периферийный контроллер прерываний (Advanced Pe-ripheral Interrupt Controller, APIC) введен в
Компьютер, оснащённый контроллером APIC, обязательно имеет возможность функционировать и в режиме,
Компьютер, оснащённый контроллером APIC, обязательно имеет возможность функционировать и в режиме,
На входы контроллеров прерываний поступают запросы от стандартных устройств (клавиатура, системный
На входы контроллеров прерываний поступают запросы от стандартных устройств (клавиатура, системный
Каждому устройству, для поддержки работы которого требуются прерывания, должен быть назначен
Каждому устройству, для поддержки работы которого требуются прерывания, должен быть назначен
В процессе назначения прерываний может участвовать система PnP для шин ISA
В процессе назначения прерываний может участвовать система PnP для шин ISA
Традиционный контроллер прерываний - PIC
Традиционный контроллер прерываний - PIC
Традиционный контроллер прерываний - PIC
Контроллер прерываний (PIC) 8259А является периферийным
Традиционный контроллер прерываний - PIC
Контроллер прерываний (PIC) 8259А является периферийным
Каждый вход может быть программно замаскирован — тогда он не вызывает
Каждый вход может быть программно замаскирован — тогда он не вызывает
С каждым входом запроса в контроллере связано по одному биту в
С каждым входом запроса в контроллере связано по одному биту в
Контроллер прерываний позволяет программировать свои входы на чувствительность к уровню или
Контроллер прерываний позволяет программировать свои входы на чувствительность к уровню или
В любом случае сигнал запроса аппаратного прерывания IRQx должен удерживаться генерирующей
В любом случае сигнал запроса аппаратного прерывания IRQx должен удерживаться генерирующей
Если к этому моменту запрос окажется снятым, источник прерывания корректно идентифицирован
Если к этому моменту запрос окажется снятым, источник прерывания корректно идентифицирован
Один контроллер PIC 8259А позволяет обслуживать 8 запросов прерываний; в PC/AT
Один контроллер PIC 8259А позволяет обслуживать 8 запросов прерываний; в PC/AT
В IBM PC/XT/AT используется специальный режим вложенных прерываний с фиксированным приоритетом
Для подключения обработчика прерывания от устройства первым делом следует загрузить обработчик
Для подключения обработчика прерывания от устройства первым делом следует загрузить обработчик
В современных системных платах функции контроллеров прерываний возлагаются на чипсет, который
В современных системных платах функции контроллеров прерываний возлагаются на чипсет, который
Однако в операционном режиме всегда сохраняется программная совместимость с 8259А.
При
Однако в операционном режиме всегда сохраняется программная совместимость с 8259А.
При
Улучшенный контроллер прерываний -APIC
Улучшенный контроллер прерываний -APIC
Улучшенный контроллер прерываний -APIC
Контроллер APIC в первую очередь предназначен для
Улучшенный контроллер прерываний -APIC
Контроллер APIC в первую очередь предназначен для
Все контроллеры APIC соединены между собой локальной шиной, по которой они
Все контроллеры APIC соединены между собой локальной шиной, по которой они
Контроллер прерываний от ввода-вывода (I/O APIC) преобразует запросы аппаратных прерываний от
Контроллер прерываний от ввода-вывода (I/O APIC) преобразует запросы аппаратных прерываний от

Проблема разделяемых прерываний
Проблема разделяемых прерываний
Проблема разделяемых прерываний
Линии запросов прерываний в компьютере, насыщенном периферийными устройствами,
Проблема разделяемых прерываний
Линии запросов прерываний в компьютере, насыщенном периферийными устройствами,
Если это, то обработчик должен выполнить необходимые действия и сбросить сигнал
Если это, то обработчик должен выполнить необходимые действия и сбросить сигнал
В соответствии со схемотехникой логики ТТЛ и КМОП активным уровнем должен
В соответствии со схемотехникой логики ТТЛ и КМОП активным уровнем должен
Поясним, почему надежная разделяемость при чувствительности к перепаду на линии запроса
Поясним, почему надежная разделяемость при чувствительности к перепаду на линии запроса
Для шины PCI с аппаратной точки зрения проблема разделения прерываний решена
Для шины PCI с аппаратной точки зрения проблема разделения прерываний решена
После успешного решения аппаратной задачи обеспечения разделяемости линий запроса возникает задача
После успешного решения аппаратной задачи обеспечения разделяемости линий запроса возникает задача
Обработчики прерываний устройств должны вести себя корректно, учитывая возможность попадания в
Обработчики прерываний устройств должны вести себя корректно, учитывая возможность попадания в

Прямой доступ к памяти - DMA
Прямой доступ к памяти - DMA
Прямой доступ к памяти (Direct Memory Access, DMA) - это обмен
Прямой доступ к памяти (Direct Memory Access, DMA) - это обмен
Для устройств шины PCI (и всех ее «родственников») контроллер является частью
Для устройств шины PCI (и всех ее «родственников») контроллер является частью
Первоначально он использовался устройствами шины ISA
Теперь он используется интегрированной традиционной периферией:
Первоначально он использовался устройствами шины ISA
Теперь он используется интегрированной традиционной периферией:
Аксессуары системной платы IBM РС
Аксессуары системной платы IBM РС
Системная плата первой модели РС содержала несколько функциональных узлов, которые благодаря
Системная плата первой модели РС содержала несколько функциональных узлов, которые благодаря
Эти узлы перечислены далее:
Схемы предоставления системных ресурсов — памяти, ввода-вывода, прерываний,
Эти узлы перечислены далее:
Схемы предоставления системных ресурсов — памяти, ввода-вывода, прерываний,
Системный порт АТ, предназначенный для управления немаскируемыми прерываниями и звуком.
Канал
Системный порт АТ, предназначенный для управления немаскируемыми прерываниями и звуком.
Канал
Системный таймер - 8253/8254
Системный таймер - 8253/8254
Системный таймер - 8253/8254
Во всех моделях РС используется трехканальный счетчик-таймер,
Системный таймер - 8253/8254
Во всех моделях РС используется трехканальный счетчик-таймер,
В качестве счетчиков-таймеров в XT применялась микросхема i8253, а в АТ
В качестве счетчиков-таймеров в XT применялась микросхема i8253, а в АТ
Внутренние счетчики микросхемы имеют разрядность 16 бит, но общение с ними
Внутренние счетчики микросхемы имеют разрядность 16 бит, но общение с ними
Канал управления звуком - PC speaker
Канал управления звуком - PC speaker
Канал управления звуком - PC speaker
Стандартный канал управления звуком PC
Канал управления звуком - PC speaker
Стандартный канал управления звуком PC
Разрешая/запрещая формирование сигнала программно-управляемым битом 1 системного порта 61h, можно подавать
Разрешая/запрещая формирование сигнала программно-управляемым битом 1 системного порта 61h, можно подавать
С учетом физиологии слуха (инерционности восприятия) быстрым переключением частот можно достигать
С учетом физиологии слуха (инерционности восприятия) быстрым переключением частот можно достигать
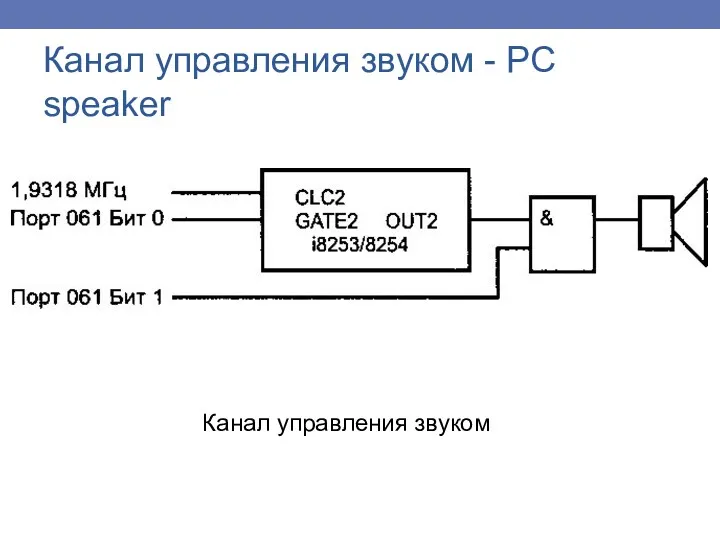
Канал управления звуком
Канал управления звуком - PC speaker
Канал управления звуком - PC speaker
Более интересные звуки можно извлекать, используя принцип широтно-импульсной модуляции, программно осуществляемый
Более интересные звуки можно извлекать, используя принцип широтно-импульсной модуляции, программно осуществляемый
Процессоры, начиная с 80286, способны формировать такой поток управляющих сигналов, который
Процессоры, начиная с 80286, способны формировать такой поток управляющих сигналов, который
Кроме того, качество воспроизведения в значительной степени зависит от частотных свойств
Кроме того, качество воспроизведения в значительной степени зависит от частотных свойств
Для ранних версий Windows существует даже драйвер, обеспечивающий извлечение звука через
Для ранних версий Windows существует даже драйвер, обеспечивающий извлечение звука через
Батарейная память и часы – CMOS Memory, RTC
Батарейная память и часы – CMOS Memory, RTC
Батарейная память и часы – CMOS Memory, RTC
В АТ для
Батарейная память и часы – CMOS Memory, RTC
В АТ для
Сначала содержимое этой памяти и дату модифицировали с помощью внешней загружаемой
Сначала содержимое этой памяти и дату модифицировали с помощью внешней загружаемой
Таймер синхронизируется от собственного генератора с кварцевым резонатором, как правило, на
Таймер синхронизируется от собственного генератора с кварцевым резонатором, как правило, на
Микросхема CMOS RTC является источником аппаратного прерывания с номером 8.
Прерывания могут
Микросхема CMOS RTC является источником аппаратного прерывания с номером 8.
Прерывания могут
Поскольку эта память имеет быстродействие порядка единиц микросекунд, необходима программная задержка
Поскольку эта память имеет быстродействие порядка единиц микросекунд, необходима программная задержка
Для определения момента окончания смены состояния часов можно пользоваться и разрешением
Для определения момента окончания смены состояния часов можно пользоваться и разрешением
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
Сервисы Int 1Ah BIOS позволяют считывать и модифицировать значения системного таймера,
АН = 0 — чтение системного таймера (двойного слова по адресу
АН = 0 — чтение системного таймера (двойного слова по адресу
АН = 1 — установка системного таймера (СХ — старшая часть,
АН = 1 — установка системного таймера (СХ — старшая часть,
АН = 3 — установка времени в RTC (назначение регистров и
АН = 3 — установка времени в RTC (назначение регистров и
АН = 5 — установка даты в RTC (назначение регистров и
АН = 5 — установка даты в RTC (назначение регистров и
Функции Int 15h BIOS позволяют программировать таймер CMOS RTC — вводить
Функции Int 15h BIOS позволяют программировать таймер CMOS RTC — вводить
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
АН =
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
АН =
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
АХ =
Системная поддержка таймеров - Int 1Ah Int 15h BIOS
АХ =
Распределение системных ресурсов
Распределение системных ресурсов
Распределение системных ресурсов
Для того чтобы программы могли взаимодействовать со своими
Распределение системных ресурсов
Для того чтобы программы могли взаимодействовать со своими
Для адресов памяти и портов ввода-вывода бесконфликтность означает, что диапазоны соответствующих
Для адресов памяти и портов ввода-вывода бесконфликтность означает, что диапазоны соответствующих
Если конфликтующие устройства находятся на разных шинах, то будет прочитаны данные
Если конфликтующие устройства находятся на разных шинах, то будет прочитаны данные
Информация при этом не искажается.
Однако незапланированные конфликты по записи могут
Информация при этом не искажается.
Однако незапланированные конфликты по записи могут
Операции записи могут выполняться широковещательно — распространяться по всем шинам.
Операции
Операции записи могут выполняться широковещательно — распространяться по всем шинам.
Операции
Для линий запросов прерываний бесконфликтность трактуется несколько сложнее.
В классической системе
Для линий запросов прерываний бесконфликтность трактуется несколько сложнее.
В классической системе
Аппаратные средства IBMРС. Гук М.Ю. Энциклопедия. З-е изд. — СПб.: Питер,
Аппаратные средства IBMРС. Гук М.Ю. Энциклопедия. З-е изд. — СПб.: Питер,
https://i2.wp.com/laptopmedia.com/wp-content/uploads/2017/06/900269711f3c.jpg
http://cart.softline.ru/pictures/products/16/35/05/99/af/f7/e1/63/ad/origin.jpeg
https://i.ebayimg.com/00/s/Njc1WDkwMA==/z/tkwAAOSweW5VAd64/$_57.JPG?set_id=880000500F
https://d.allegroimg.com/s1440/034db7/5bf73aa54f0ebb9f118bdae5d3ed
http://900igr.net/up/datas/55384/033.jpg
https://slide-share.ru/slide/4015074.jpeg
http://www.venuscomputers.pk/wp-content/uploads/2014/10/TG-3468.jpg
https://c-s.ru/uploads/29143/154716.jpg
https://go3.imgsmail.ru/imgpreview?key=65253deb8ce2d91f&mb=storage
https://i.ya-webdesign.com/images/pci-vector-slot.png
https://i.ebayimg.com/00/s/OTAwWDE2MDA=/z/ATkAAOSwAWlajflo/$_57.JPG?set_id=8800005007
Список ссылок:
https://i2.wp.com/laptopmedia.com/wp-content/uploads/2017/06/900269711f3c.jpg
http://cart.softline.ru/pictures/products/16/35/05/99/af/f7/e1/63/ad/origin.jpeg
https://i.ebayimg.com/00/s/Njc1WDkwMA==/z/tkwAAOSweW5VAd64/$_57.JPG?set_id=880000500F
https://d.allegroimg.com/s1440/034db7/5bf73aa54f0ebb9f118bdae5d3ed
http://900igr.net/up/datas/55384/033.jpg
https://slide-share.ru/slide/4015074.jpeg
http://www.venuscomputers.pk/wp-content/uploads/2014/10/TG-3468.jpg
https://c-s.ru/uploads/29143/154716.jpg
https://go3.imgsmail.ru/imgpreview?key=65253deb8ce2d91f&mb=storage
https://i.ya-webdesign.com/images/pci-vector-slot.png
https://i.ebayimg.com/00/s/OTAwWDE2MDA=/z/ATkAAOSwAWlajflo/$_57.JPG?set_id=8800005007
Список ссылок:
 Сухие строительные смеси ГЕРКУЛЕС. Шпатлевки
Сухие строительные смеси ГЕРКУЛЕС. Шпатлевки Мастер-класс Новогодняя игрушка Елочка
Мастер-класс Новогодняя игрушка Елочка ПрезентацияSlava 130420A
ПрезентацияSlava 130420A Радио Комсомольская правда. Новые программы в эфире. Рекламные возможности
Радио Комсомольская правда. Новые программы в эфире. Рекламные возможности Измельчительно-режущее оборудование
Измельчительно-режущее оборудование Компания MasterMould. Высокоскоростная штамповка
Компания MasterMould. Высокоскоростная штамповка Урок в 11 химико-биологическом классе по теме: Особенности свойств отдельных классов неорганических и органических веществ на примере лекарственных средств
Урок в 11 химико-биологическом классе по теме: Особенности свойств отдельных классов неорганических и органических веществ на примере лекарственных средств Системы обучения в начальной школе
Системы обучения в начальной школе Предприятие – основное звено рыночного хозяйствования
Предприятие – основное звено рыночного хозяйствования Талшықты лазер
Талшықты лазер С праздником 8 марта
С праздником 8 марта Свобода в деятельности человека
Свобода в деятельности человека Организация воспитательно-образовательной работы с детьми раннего возраста в группе кратковременного пребывания
Организация воспитательно-образовательной работы с детьми раннего возраста в группе кратковременного пребывания Трапеция. Свойства трапеции
Трапеция. Свойства трапеции Презентация для детей старшего дошкольного возраста Как добывают уголь
Презентация для детей старшего дошкольного возраста Как добывают уголь School days
School days Геометрические задачи С4, по материалам ЕГЭ. Подобие треугольников
Геометрические задачи С4, по материалам ЕГЭ. Подобие треугольников Расчет элементов железобетонных конструкций по предельным состояниям второй группы
Расчет элементов железобетонных конструкций по предельным состояниям второй группы Венерические заболевания
Венерические заболевания презентация вкр (2)
презентация вкр (2) Методические рекомендации по построению предметно-развивающей среды в соответствии с ФГОС в группе раннего возраста.
Методические рекомендации по построению предметно-развивающей среды в соответствии с ФГОС в группе раннего возраста. Кухни Боснии, Герцеговины, Хорватии и Сербии
Кухни Боснии, Герцеговины, Хорватии и Сербии Гордость театральной сцены Башкортостана
Гордость театральной сцены Башкортостана Сократительная функция всех типов мышц
Сократительная функция всех типов мышц Врожденная непроходимость ЖКТ у детей
Врожденная непроходимость ЖКТ у детей Трахеобронхомегалия (синдром Мунье-Куна)
Трахеобронхомегалия (синдром Мунье-Куна) Линейная алгебра. Лекционно-практические занятия
Линейная алгебра. Лекционно-практические занятия Маркетинговые исследования
Маркетинговые исследования