- Определение места судна с помощью РЛС

Содержание
- 2. Учебные вопросы лекции: 1. Измерение с помощью судовых РЛС направлений и расстояний. 2. Определение места судна
- 3. 3 Литература Основная: 1. Навигация и лоция [Электронный ресурс]: учебник для студентов (курсантов), обучающихся по специальности
- 4. 4 Первый учебный вопрос 1. Измерение с помощью судовых РЛС направлений и расстояний.
- 5. 5 Современные судовые РЛС «Наяда-25МЕ»; «Наяда-25М1»; «Наяда-34М»; «Наяда-34МЕ». Кроме того, РЛС «Лиман-18М1» и «Галс» выпускаются для
- 6. 6 НРЛС «Лиман» Рис.3 Внешний вид дисплея РЛС «Лиман» Приведённые типы РЛС из серии «Наяда» имеют
- 7. Навигационная радиолокационная станция «Лиман-18М1» (рис. 3) предназначена для обеспечения навигации и повышения безопасности плавания судов валовой
- 8. 8 НРЛС «Наяда – 34М» Недостатки навигационных РЛС: - неполное совпадение радиолокационного изображения берега на экране
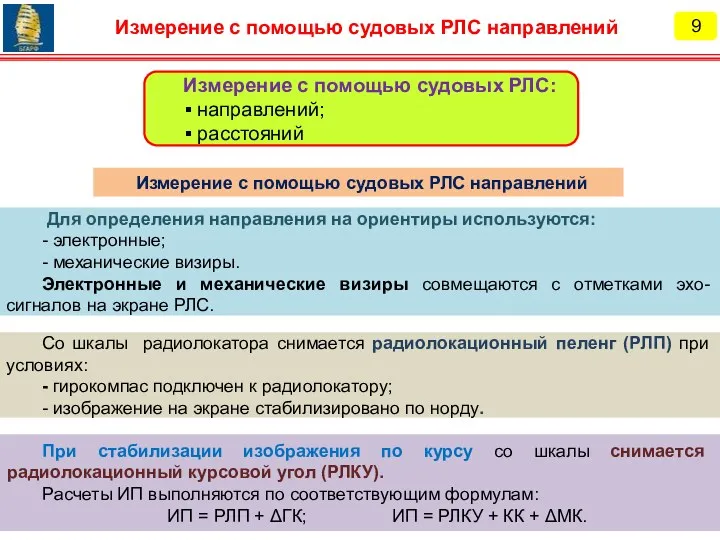
- 9. 9 Измерение с помощью судовых РЛС направлений Измерение с помощью судовых РЛС: направлений; расстояний Измерение с
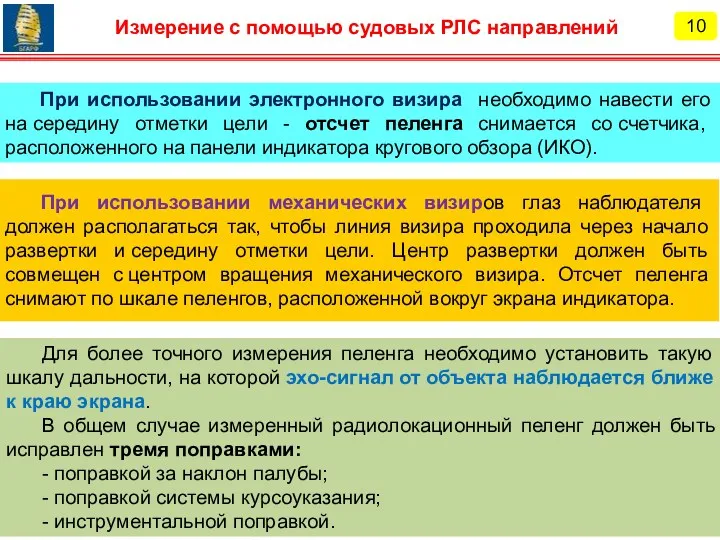
- 10. Для более точного измерения пеленга необходимо установить такую шкалу дальности, на которой эхо-сигнал от объекта наблюдается
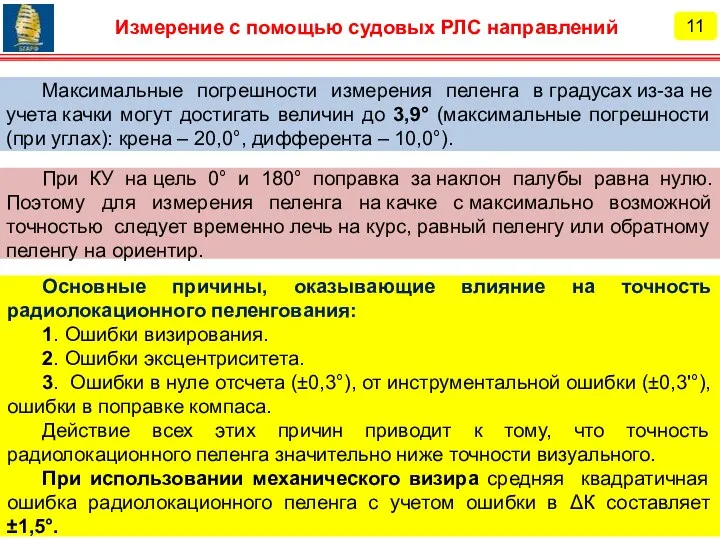
- 11. Основные причины, оказывающие влияние на точность радиолокационного пеленгования: 1. Ошибки визирования. 2. Ошибки эксцентриситета. 3. Ошибки
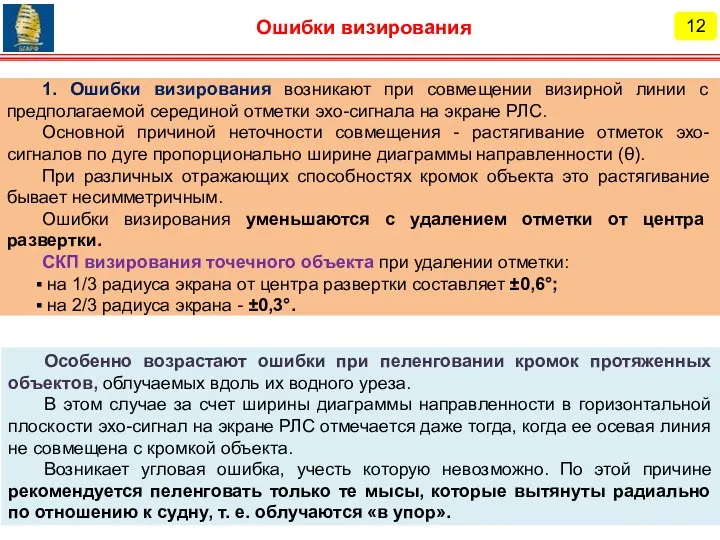
- 12. 12 Ошибки визирования 1. Ошибки визирования возникают при совмещении визирной линии с предполагаемой серединой отметки эхо-сигнала
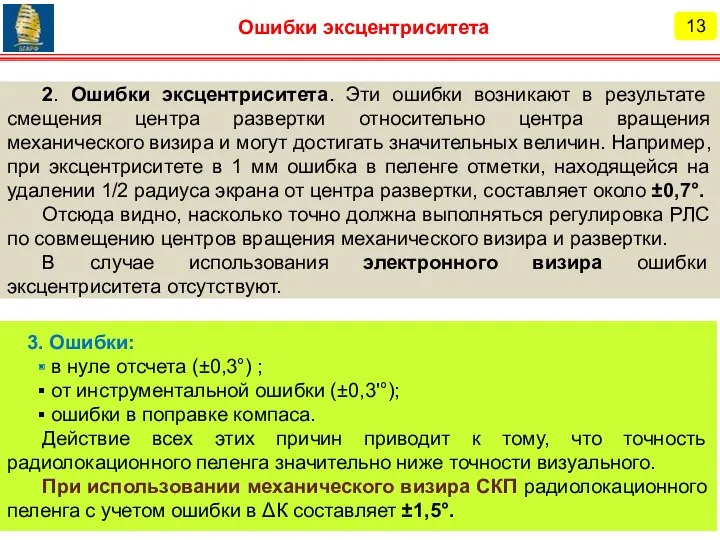
- 13. 13 Ошибки эксцентриситета 2. Ошибки эксцентриситета. Эти ошибки возникают в результате смещения центра развертки относительно центра
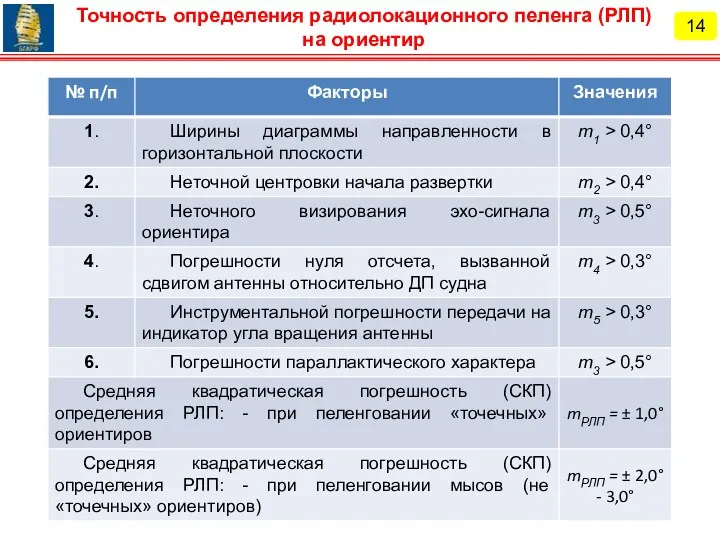
- 14. 14 Точность определения радиолокационного пеленга (РЛП) на ориентир
- 15. Неподвижные кольца дальности (НКД) используются для измерения дистанций на глаз тогда, когда в НРЛС нет других
- 16. Индикатор точных координат (ИТК) служит для точного измерения дистанции и применяется в РЛС, имеющих ПВД. Он
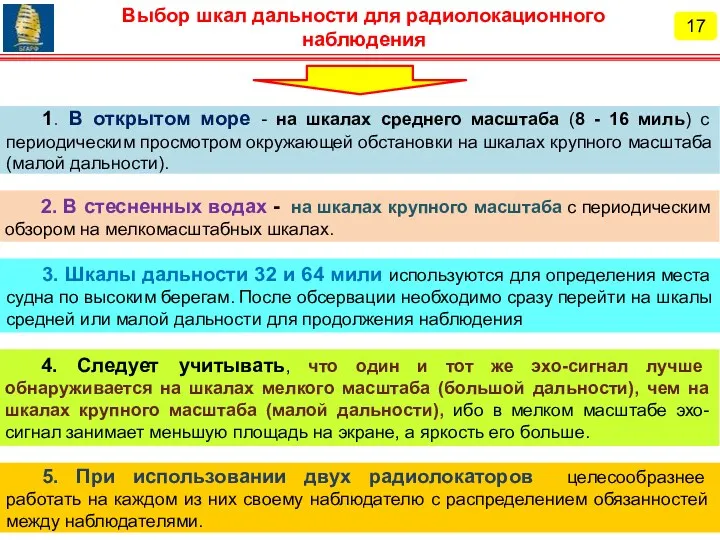
- 17. 3. Шкалы дальности 32 и 64 мили используются для определения места судна по высоким берегам. После
- 18. 18 Второй учебный вопрос 2. Определение места судна с помощью РЛС.
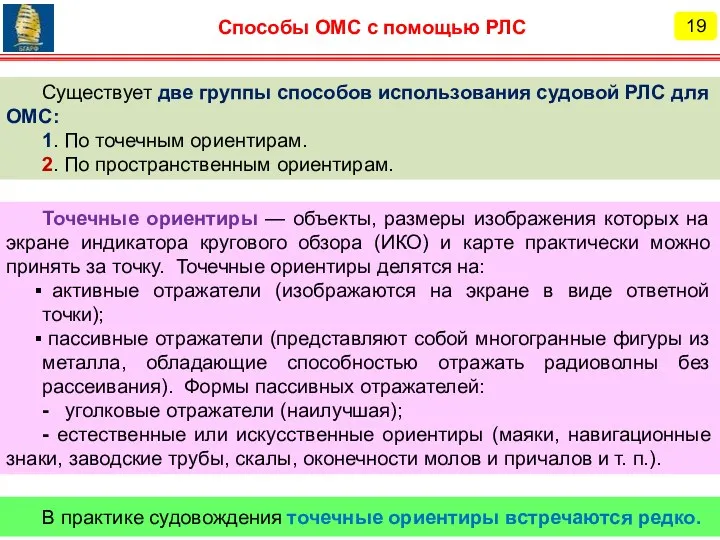
- 19. 19 Способы ОМС с помощью РЛС Существует две группы способов использования судовой РЛС для ОМС: 1.
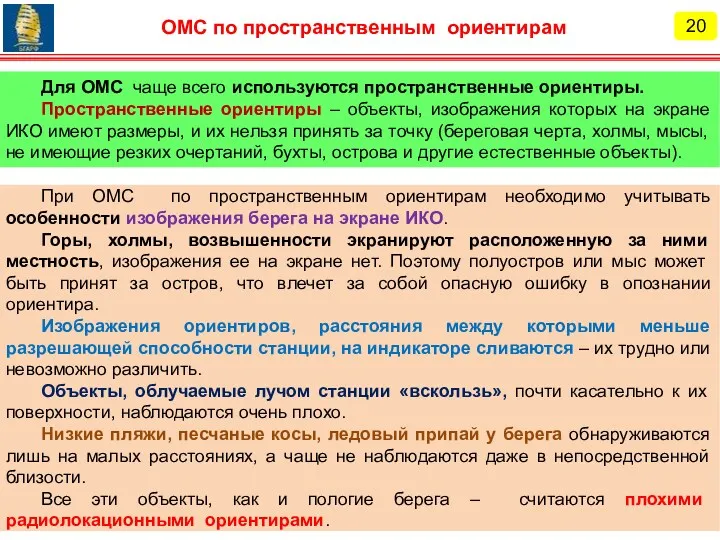
- 20. 20 ОМС по пространственным ориентирам Для ОМС чаще всего используются пространственные ориентиры. Пространственные ориентиры – объекты,
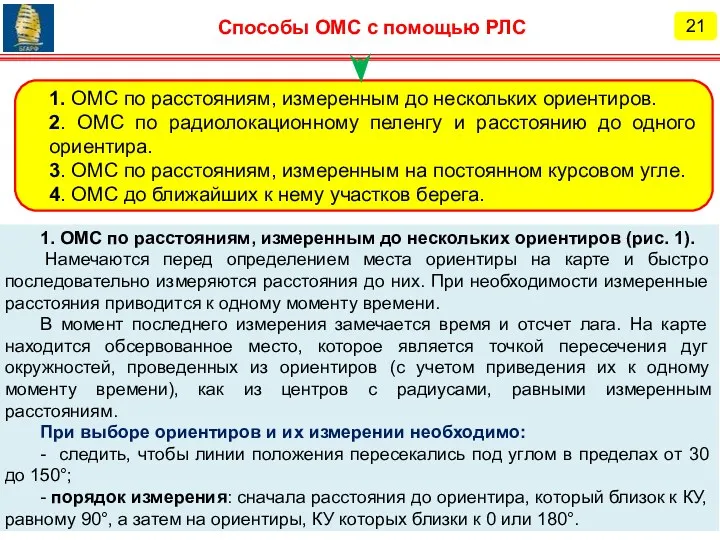
- 21. 21 Способы ОМС с помощью РЛС 1. ОМС по расстояниям, измеренным до нескольких ориентиров (рис. 1).
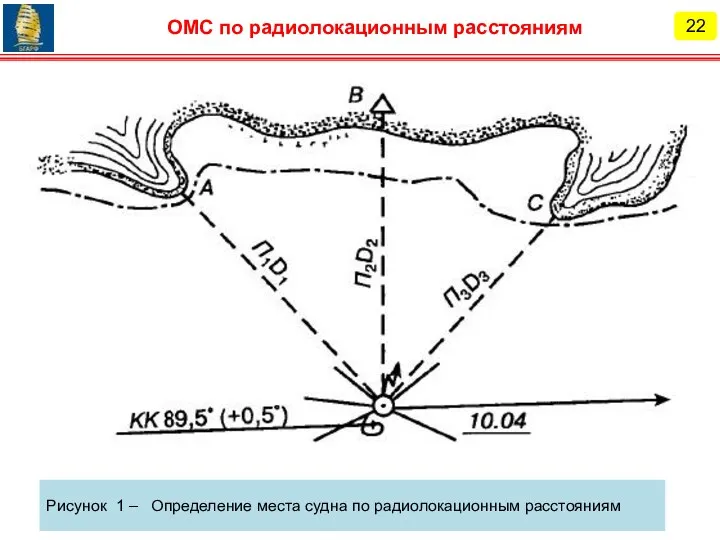
- 22. 22 ОМС по радиолокационным расстояниям Рисунок 1 – Определение места судна по радиолокационным расстояниям
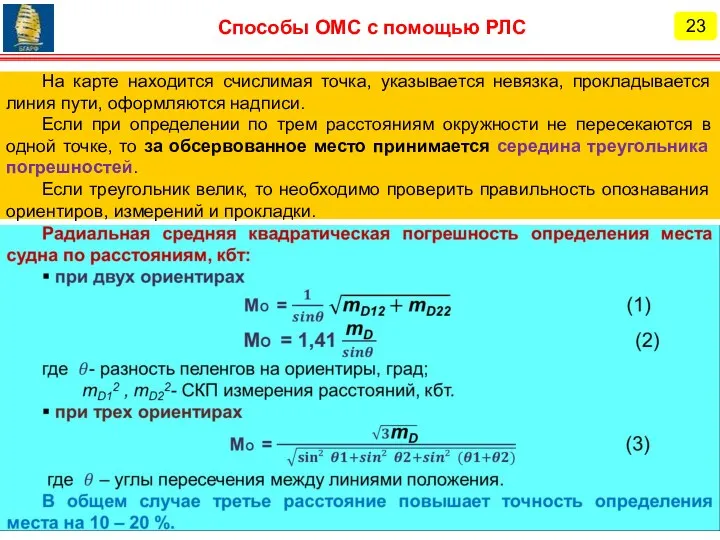
- 23. 23 Способы ОМС с помощью РЛС На карте находится счислимая точка, указывается невязка, прокладывается линия пути,
- 24. Рисунок 2 – Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентира 24 ОМС
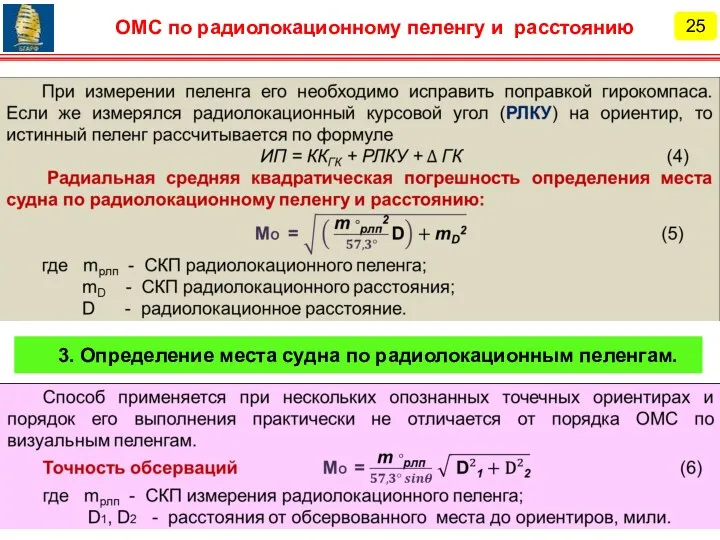
- 25. 25 ОМС по радиолокационному пеленгу и расстоянию 3. Определение места судна по радиолокационным пеленгам.
- 26. Опознание расчлененного берега но вееру пеленгов и расстояний (рис.3). При определении места судна по пространственным ориентирам
- 27. Рисунок 3 – Опознание расчлененного берега по вееру радиолокационных пеленгов и расстояний 27 Опознание расчлененного берега
- 28. Полученное место судна ненадежно и при удобном случае необходимо его определить другим способом. Порядок выполнения (рис.
- 29. Рисунок 4 – Определение места судна по радиолокационным расстояниям, измеренным на постоянном курсовом угле 29 Определение
- 30. Кальку передвигают около счислимого места так, чтобы путь судна на карте был параллелен пути на кальке.
- 31. 2. Замечаются время и отсчет лага в момент измерения расстояния до последнего ориентира. 3. На кальке
- 32. 32 Выводы по лекции 1. Измерение направлений и расстояний осуществляется с помощью судовых РЛС. Для определения
- 34. Скачать презентацию
Учебные вопросы лекции:
1. Измерение с помощью судовых РЛС направлений и расстояний.
2.
1. Измерение с помощью судовых РЛС направлений и расстояний.
2.
![3 Литература Основная: 1. Навигация и лоция [Электронный ресурс]: учебник](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/585204/slide-2.jpg)
3
Литература
Основная:
1. Навигация и лоция [Электронный ресурс]: учебник для студентов
3
Литература
Основная:
1. Навигация и лоция [Электронный ресурс]: учебник для студентов
4
Первый учебный вопрос
1. Измерение с помощью судовых РЛС
4
Первый учебный вопрос
1. Измерение с помощью судовых РЛС

5
Современные судовые РЛС
«Наяда-25МЕ»;
«Наяда-25М1»;
«Наяда-34М»;
«Наяда-34МЕ».
5
Современные судовые РЛС
«Наяда-25МЕ»;
«Наяда-25М1»;
«Наяда-34М»;
«Наяда-34МЕ».

6
НРЛС «Лиман»
Рис.3 Внешний вид дисплея РЛС «Лиман»
Приведённые типы РЛС
6
НРЛС «Лиман»
Рис.3 Внешний вид дисплея РЛС «Лиман»
Приведённые типы РЛС
Навигационная радиолокационная станция «Лиман-18М1» (рис. 3) предназначена для обеспечения навигации
Навигационная радиолокационная станция «Лиман-18М1» (рис. 3) предназначена для обеспечения навигации
8
НРЛС «Наяда – 34М»
Недостатки навигационных РЛС:
- неполное совпадение
8
НРЛС «Наяда – 34М»
Недостатки навигационных РЛС:
- неполное совпадение
9
Измерение с помощью судовых РЛС направлений
Измерение с помощью судовых
9
Измерение с помощью судовых РЛС направлений
Измерение с помощью судовых
Для более точного измерения пеленга необходимо установить такую шкалу дальности, на которой эхо-сигнал от объекта
Для более точного измерения пеленга необходимо установить такую шкалу дальности, на которой эхо-сигнал от объекта
Основные причины, оказывающие влияние на точность радиолокационного пеленгования:
1. Ошибки визирования.
2. Ошибки
Основные причины, оказывающие влияние на точность радиолокационного пеленгования:
1. Ошибки визирования.
2. Ошибки
12
Ошибки визирования
1. Ошибки визирования возникают при совмещении визирной линии с
12
Ошибки визирования
1. Ошибки визирования возникают при совмещении визирной линии с
13
Ошибки эксцентриситета
2. Ошибки эксцентриситета. Эти ошибки возникают в результате смещения
13
Ошибки эксцентриситета
2. Ошибки эксцентриситета. Эти ошибки возникают в результате смещения
14
Точность определения радиолокационного пеленга (РЛП) на ориентир
14
Точность определения радиолокационного пеленга (РЛП) на ориентир
Неподвижные кольца дальности (НКД) используются для измерения дистанций на глаз тогда, когда в НРЛС
Неподвижные кольца дальности (НКД) используются для измерения дистанций на глаз тогда, когда в НРЛС
Индикатор точных координат (ИТК) служит для точного измерения дистанции и применяется в РЛС, имеющих
Индикатор точных координат (ИТК) служит для точного измерения дистанции и применяется в РЛС, имеющих
3. Шкалы дальности 32 и 64 мили используются для определения места
3. Шкалы дальности 32 и 64 мили используются для определения места
18
Второй учебный вопрос
2. Определение места судна с помощью РЛС.
18
Второй учебный вопрос
2. Определение места судна с помощью РЛС.
19
Способы ОМС с помощью РЛС
Существует две группы способов использования
19
Способы ОМС с помощью РЛС
Существует две группы способов использования
20
ОМС по пространственным ориентирам
Для ОМС чаще всего используются пространственные
20
ОМС по пространственным ориентирам
Для ОМС чаще всего используются пространственные
21
Способы ОМС с помощью РЛС
1. ОМС по расстояниям, измеренным
21
Способы ОМС с помощью РЛС
1. ОМС по расстояниям, измеренным
22
ОМС по радиолокационным расстояниям
Рисунок 1 – Определение места судна
22
ОМС по радиолокационным расстояниям
Рисунок 1 – Определение места судна
23
Способы ОМС с помощью РЛС
На карте находится счислимая точка,
23
Способы ОМС с помощью РЛС
На карте находится счислимая точка,
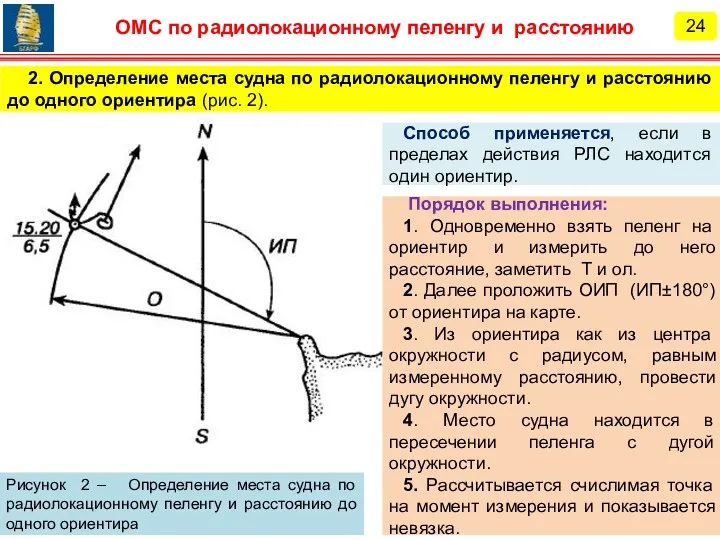
Рисунок 2 – Определение места судна по радиолокационному пеленгу и расстоянию
Рисунок 2 – Определение места судна по радиолокационному пеленгу и расстоянию
25
ОМС по радиолокационному пеленгу и расстоянию
3. Определение места судна
25
ОМС по радиолокационному пеленгу и расстоянию
3. Определение места судна
Опознание расчлененного берега но вееру пеленгов и расстояний (рис.3).
При определении места
Опознание расчлененного берега но вееру пеленгов и расстояний (рис.3).
При определении места

Рисунок 3 – Опознание расчлененного берега по вееру радиолокационных пеленгов и
Рисунок 3 – Опознание расчлененного берега по вееру радиолокационных пеленгов и
Полученное место судна ненадежно и при удобном случае необходимо его определить
Полученное место судна ненадежно и при удобном случае необходимо его определить
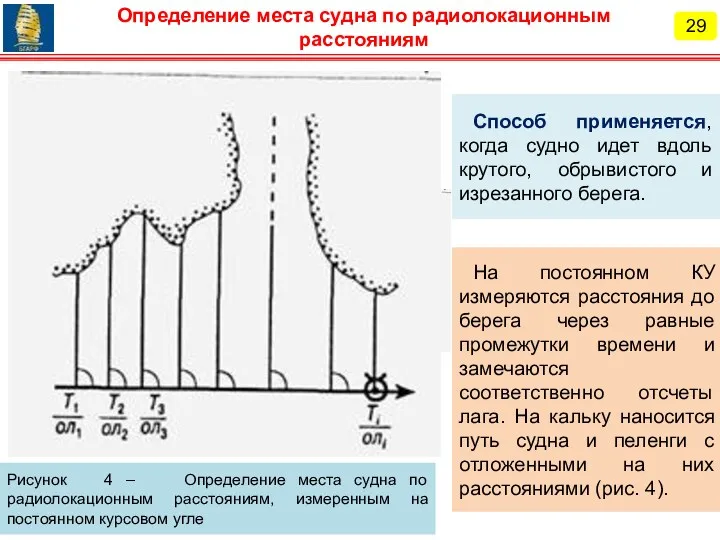
Рисунок 4 – Определение места судна по радиолокационным расстояниям, измеренным на
Рисунок 4 – Определение места судна по радиолокационным расстояниям, измеренным на
Кальку передвигают около счислимого места так, чтобы путь судна на карте
Кальку передвигают около счислимого места так, чтобы путь судна на карте
2. Замечаются время и отсчет лага в момент измерения расстояния до
2. Замечаются время и отсчет лага в момент измерения расстояния до
32
Выводы по лекции
1. Измерение направлений и расстояний осуществляется с
32
Выводы по лекции
1. Измерение направлений и расстояний осуществляется с
 Совершенствование механизмов государственной политики (на примере молодежной политики Краснодарского края)
Совершенствование механизмов государственной политики (на примере молодежной политики Краснодарского края) Выбор подъемно-транспортного оборудования и определение высоты верхнего строения здания насосной станции
Выбор подъемно-транспортного оборудования и определение высоты верхнего строения здания насосной станции Лакокрасочные покрытия. Методы нанесения порошковых композиций. (Лекция 9)
Лакокрасочные покрытия. Методы нанесения порошковых композиций. (Лекция 9) Иллюстрированная Россия Июль 1927
Иллюстрированная Россия Июль 1927 Я – листок бумажный, маленький, отважный
Я – листок бумажный, маленький, отважный Театрализованная деятельность в детском саду
Театрализованная деятельность в детском саду Клинико-фармакологическая характеристика лекарственных средств, применяемых при бронхиальной астме
Клинико-фармакологическая характеристика лекарственных средств, применяемых при бронхиальной астме КРД engine indicating расходомеры топлива. Engine indicating. Расходомеры топлива
КРД engine indicating расходомеры топлива. Engine indicating. Расходомеры топлива Магистральные нефтепроводы (лекция № 3)
Магистральные нефтепроводы (лекция № 3) Программа методического объединения для воспитателей в группах детей раннего возраста Формирование благожелательного восприятия взрослого в период адаптации у детей раннего возраста
Программа методического объединения для воспитателей в группах детей раннего возраста Формирование благожелательного восприятия взрослого в период адаптации у детей раннего возраста Геморрой. Факторы, способствующие развитию заболевания
Геморрой. Факторы, способствующие развитию заболевания Микроцентрифуги для выделения ДНК в ПЦР
Микроцентрифуги для выделения ДНК в ПЦР Работа на радиостанциях КВ и УКВ диапазонов. Радиоданные, порядок пользования ими и правила ведения радиообмена. (Тема 5.2)
Работа на радиостанциях КВ и УКВ диапазонов. Радиоданные, порядок пользования ими и правила ведения радиообмена. (Тема 5.2) Московская региональная программа ландшафтно-усадебной урбанизации на 2016-2025 гг
Московская региональная программа ландшафтно-усадебной урбанизации на 2016-2025 гг Основы проектирования приспособлений
Основы проектирования приспособлений А. Барто - поэзия доброты
А. Барто - поэзия доброты Классификации нарушений речи
Классификации нарушений речи Саами - коренной малочисленный народ России
Саами - коренной малочисленный народ России Дети и телевизор
Дети и телевизор Отражение в литературе войны 1812 года
Отражение в литературе войны 1812 года Движение
Движение Разговор с родителями Поощрение или наказание
Разговор с родителями Поощрение или наказание Динамика системы материальных точек. Лекция 3.0
Динамика системы материальных точек. Лекция 3.0 Тест. Химическая связь
Тест. Химическая связь Культура и быт родного края в XVIII веке
Культура и быт родного края в XVIII веке Производство как материальная основа жизни общества
Производство как материальная основа жизни общества Свято Покрови Пресвятої Богородиці
Свято Покрови Пресвятої Богородиці Заседание семейного клуба на тему:Семейные увлечения и хобби
Заседание семейного клуба на тему:Семейные увлечения и хобби